Способ управления торможением колеса
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1172782
Автор: Гецович



Текст
СОК)Э СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 5)4 В 60 Т 8/О И 1 ОСУДАРСТИЕННЫй КОМИТЕТПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЬ(54)(57) 1. СПОСОБ УПРАВЛЕНИЯ ТОРИОЖЕНИЕИ КОЛЕСА, заключающийся в чередовании Фаз его торможения и растормаживания путем поочередного повышения и понижения давления в тормозно 801172782 А приводе и задержке изменения динами,ческого состояния колеса путем уменьшения темпа изменения давления в тормозном приводе, причем уменьшение темпа изменения давления в тормозном приводе производят при степени заторможенности колеса, близ- . кой к оптимальной, о т л и ч а ющ и й с я тем, что, с целью повыше ния качества управления, изменение давления с уменьшенным темпом периодически прерывают с заранее заданной частотой и длительностью, а чередо- , вание фаз затормаживания и расторма-Ф живания и затормаживания и расторма- д живания с уменьшенным темпом производят нециклически.С."12. Способ по п. 1, о т л и ч а ющ и й с я тем, что изменение давления с уменьшенным темпом прерывают с частотой 4 - 10 Гц, а отношение длительности изменения давления к длительности поддержания его постоянным задают. в диапазоне 0,5-1,5,3. Способ по и. 1, о т л и ч а ющ и й с я тем, что нецикличность чередования фаз обеспечивают использованием при формировании сигналов на переключение фаз не менее двух контролируемых параметров.14, Способ по пп. 1 и 3 о т л ич а ю щ и й с я тем, что в качестве контролируемых параметров используют угловое ускорение колеса и его относительное продольное скольжение, а командные сигналы на переключение72782фаз изменения давленияформируют в соответствии с условиямипри Я ) И,и 5 с 5 при Яв а, и 55,где кФЦбЮ,и Б,Ф1 при и ) я,иб 5,К 1 при ц сЯ, иб 5.р,сигнал на быстрое повышениедавления;сигнал на повышение давленияс уменьшенным темпом;сигнал на снижение давленияс уменьшенным темпом;сигнал на быстрое снижениедавления;угловое ускорение колеса;относительное продольноескольжение колеса;соответственно пороговыезначения контролируемых параметров.1Изобретение относится к тормозным системам транспортных средств, а именно к способам и устройствам управ ления торможением, предотвращающим блокировку колес, и .используется в 5 автоматиЧеских противоблокировочных системах.Цель изобретения - повьппение качества управления.10На чертеже показаны графики изменения давления Р в тормозной камере (кривая 1), относительного продольного скольжения колеса Б (кривая 2), углового ускорения колеса М (кривая 15 3), командных сигналов К, Кг, К 5, К (линия 4), сигнала на прерывание изменения давления (линия 5). Торможение начинается при К = К, 20 поскольку выполняется первое условйе: Ф, ФУ И,.и Б с Б. Повьппение давления в тормозной камере приводит к повышению тормозного момента и как следствие, .появлению отрицательного угло вого ускорения Ж колеса и его относительного продольного скольжения Б. В точке а кривая 3 пересекает линию порогового значения Р, величина 2у становится меньые 61 что в соответствии с условиемК = К при сд с Я, и.Б ( Бгприводит к переключению с быстрого повышения давления на медленное. При этом включается цепь прерывания изменения давления. Для этого формируют пульсирующий сигнал (линия 5) и по- . дают его на отсечной клапан, разобщающий тормозную камеру с источником давления и атмосферой, В точке Ь кривые 2 и 1 пересекают линии пороговых значений, вследствие чего в соответствии с условиемК= К при ц)Я,и Б Б,3подается сигнал на медленное снижение давления. Далее при неизменных,. сцепных условиях управление торможе-, нием осуществляется при нециклическом чередовании сигналов К и К. В случае изменения сцепных условий резко гтзменяется величина Ч (точка с), На графиках показан пример для случая перехода колеса с дорожной поверхности .с высоким коэффициентом сцепления на дорогу с низким коэффиЗаказ 4963117 Тираж 650 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Иосква, Ж, Раушская наб., д. 4/5Филиал ППП цПатент", г. Ужгород, ул. Проектная, 4 циентом сцепления. Иомент переходаобозначен точкой Й. В этом случаескачкообразно уменьшается величинаМи начинает возрастать Я, Поэтому заточкой д в соответствии с условием подают командный сигнал К 4 на быстрое .снижение давления. Действие сиг О нала К на время действия сигнала К 4 прекращают. Снижение давления приводит к растормаживанию колеса и увеличению И , вследствие чего в точке е подают сигнал К, в точке Е - 15 сигнал К 1, а в точке а - сигнал К, Этим заканчивается адаптация процесса торможения к изменившимся сцепным условиям. Далее управление торможением происходит при нециклическом 20 чередовании сигналов К и К нри действии сигнала К1Прерывание измейения давления при действии сигналов К и Кэ позволяет дольше, чем при известном способе, удерживать колесо в зоне, близкой к В = 81, что повышает качество управления.Использование двух контролируемых параметров (в данном случае д и Б) ЗО. позволяет чередовать фазы изменения давления нециклически в зависимости от соотношений между действительнымизначениями этих параметров и их пороговыми значениями, Нецикличность35 смены фаз обеспечивает повышение качества управления за счет более высокой по сравнению с известным способом устойчивости против помех, генерируемых объектом регулирования. 40 Например, при кратковременном снижении коэффициента сцепления колеса с дорогой (например, масляное пятно).величина Й резко падает и через незначительный промежуток времениснова возрастает. Система управления торможением реагирует на падение 41 как на блокировку колеса и подает сигнал на его быстрое растормаживание. При циклической смене фаз, например, по известному способу за растормаживанием последует фаза отсечки (фиксации давления), а затем после достижения положительным угловым ускорением точки максимума - повторное затормаживание, т.е. помеха в данном случае приводит к ложному растормаживанию. Если в фазах растормаживания или отсечки произойдет кратковременный "всплеск" углового ускорения колеса (например, при наезде на кусок гравия), система от реагирует на это, как на разблоки" ровку колеса и подает преждевременно .сигнал на затормаживание.. При управлении по предлагаемому способу кратковременное изменение Й также приводит к изменению управляющего сигнала, но после .прохождения помехи восстанавливается предыдущий сигнал. Например, на участке аЬ кратковременное уменьшение Й вообще не повлияет на сигнал. На участке Ьс прйведет к переключению с К на К 1, но как только Й станет снова больше ь 11 произойдет обратное переключение на К, т.е. нециклическая смена фаз позволяет отменить ошибочный сигнал, вызванный помехой. Частоту сигнала К следует выби 5рать с учетом того, что слишком низкая частота препятствует своевременной корректировке давления, а слишком высокая снижает долговечность клапана. Оптимальное значение этой частоты находится в диапазоне 4-10 Гц. Отношение длительности изменения дав ления к длительности поддержания его постоянным подбирается экспериментально для данного тормозного приво-. да, тормозного механизма и колеса. В зависимости от особенностей этих элементов оптимальное значение указанного отношения может колебаться в диапазоне 0,5-1,5.
СмотретьЗаявка
3713329, 09.02.1984
ХАРЬКОВСКИЙ АВТОМОБИЛЬНО-ДОРОЖНЫЙ ИНСТИТУТ ИМ. КОМСОМОЛА УКРАИНЫ
ГЕЦОВИЧ ЕВГЕНИЙ МОИСЕЕВИЧ
МПК / Метки
МПК: B60T 8/00
Метки: колеса, торможением
Опубликовано: 15.08.1985
Код ссылки
<a href="https://patents.su/3-1172782-sposob-upravleniya-tormozheniem-kolesa.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления торможением колеса</a>
Способ непрерывного изменения фазы синусоидального колебанияec: i: g.: .: i плтл; т; з-lt; р-те;: ;: ;: чс: . “1eisauji i: a

Номер патента: 173273
Опубликовано: 01.01.1965
Авторы: Голод, Калашников
МПК: H03H 7/18
Метки: 1eisauji, з-lt, изменения, колебанияec, непрерывного, плтл, р-те, синусоидального, фазы, чс
...фазы сипусопдальпого колебания с помощью индуктивных, емкостных и потенциометрических фазовращателей.По предлагаемому способу для уменьшения инерционности на второй вход каждого пере- множителя подают соотзетственпо управляющее напряжение, амплитуда которого изменяется пропорционально синусу и косинусу требуемого угла сдвига фаз. Частота напряжения зависит от требуемой скорости изменения фазы, а выходные сигналы перемножителей векторно складываются в общем сумматоре.На чертеже изображено устройство, с мощью которого осуществляется предла мый способ непрерывного изменения ф синусоидального колебания.Входной сигнал У,г = Уо з 1 по 1 сдвигается на 90-, и оба сигнала УА и 1 гв = Уо сов а 1 подаются на перемножители 1 и 2. Сюда же...
Устройство для измерения малых динамических изменений фазы

Номер патента: 1150575
Опубликовано: 15.04.1985
Авторы: Шинкаренко, Шкилев, Шкилева
МПК: G01R 25/00
Метки: динамических, изменений, малых, фазы
...аналогового преобразователя фазы, первый нход которого соединен с первым входом сумматора и с источником опорного сигнала, а второй -с вторым входом сумматора и с выходомфазонращателя, один вход которогосоединен через интегратор с выходомблока сравнения, а другой вход фазовращателя соединен с выходом блокастабилизации амплитуды сигнала,второй вход которого соединен с выходомфазовращателя, а третий вход - спервым входом сумматора.На чертеже изображена блок-схемаустройства, реализующего способ измерения малых динамических измененийразностей фаз,Устройство содержит источник опорного напряжения П, подключенный к входу блока 1 стабилизации амплитуды, состоящего из усилителя 2,блока 3 сравнения, аналоговых преобразона" телей 4 и 5 амплитуды....
Формирователь сигналов с заданным законом изменения фазы
Номер патента: 1327267
Опубликовано: 30.07.1987
МПК: H03C 3/00
Метки: заданным, законом, изменения, сигналов, фазы, формирователь
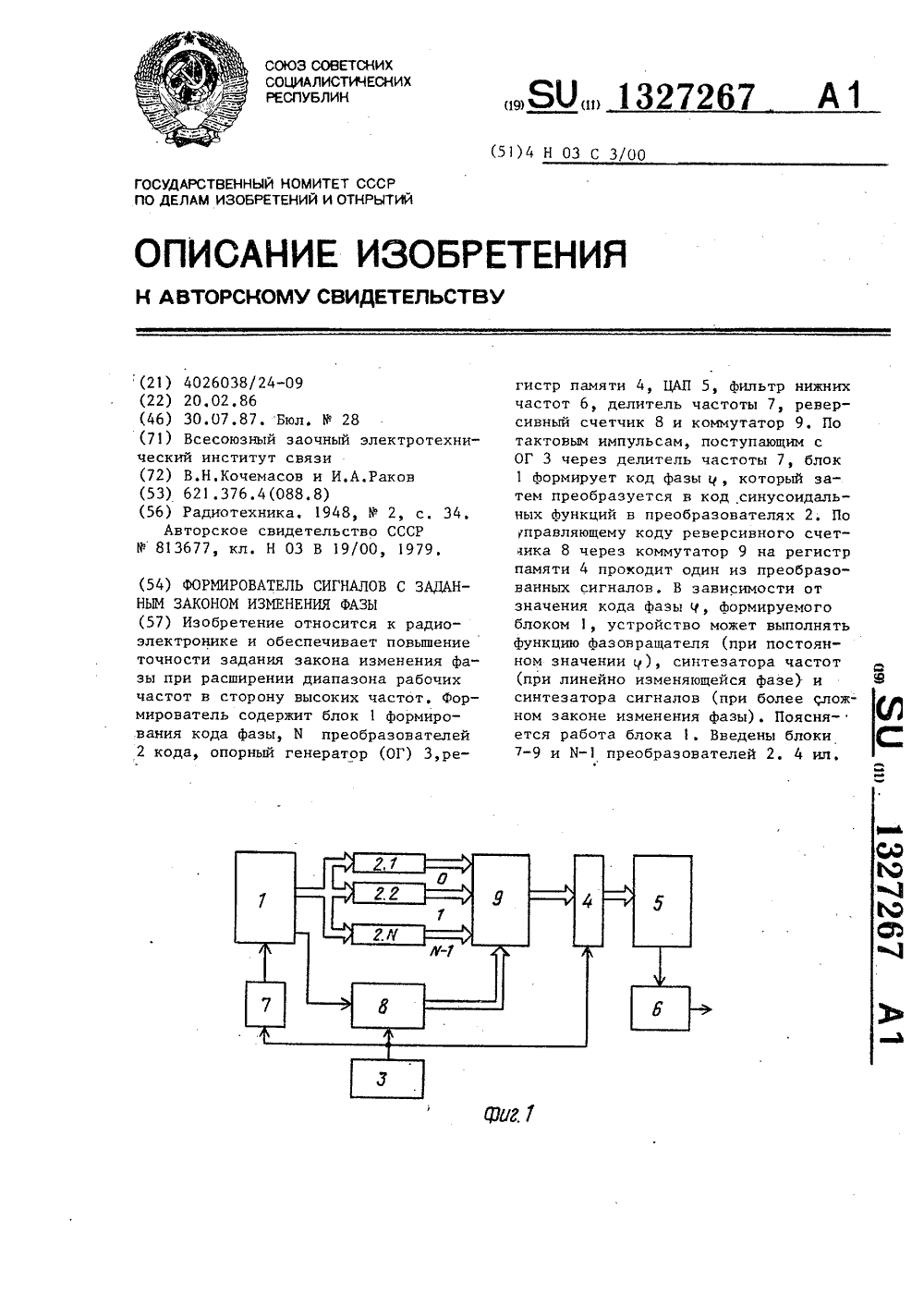
...с кодом Фазы ц в блоке 1 формирования кода Фазы. Двоичный код числа (т) шоЖ с выхода реверсивного счетчика 8 поступает на управляющий вход коммутатора 9.На выход коммутатора 9 при этом поступает код с М-(ш)шов=го его сигнального входа, Импульс с выхода опорного генератора 3, поступающий на тактовый вход регистра 4 памяти, осуществляет запись в него кода с выхода коммутатора 9, и на выходе ЦАП 5 формируется напряжение, пропорциональное записанному коду. ФНЧ6 пропускает на выход устройства первую гармонику сформированного сигнала.Вся разрядная сетка блока 1 формирования кода Фазы и преобразователей кода 2 . 2используется дляреализации отклонения заданного закона изменения фазы от линейного, соответствующего несущей частоте, Приэтом...
Формирователь сигналов с заданным законом изменения фазы
Номер патента: 1385238
Опубликовано: 30.03.1988
Авторы: Жаров, Кочемасов, Раков
МПК: H03C 3/00
Метки: заданным, законом, изменения, сигналов, фазы, формирователь
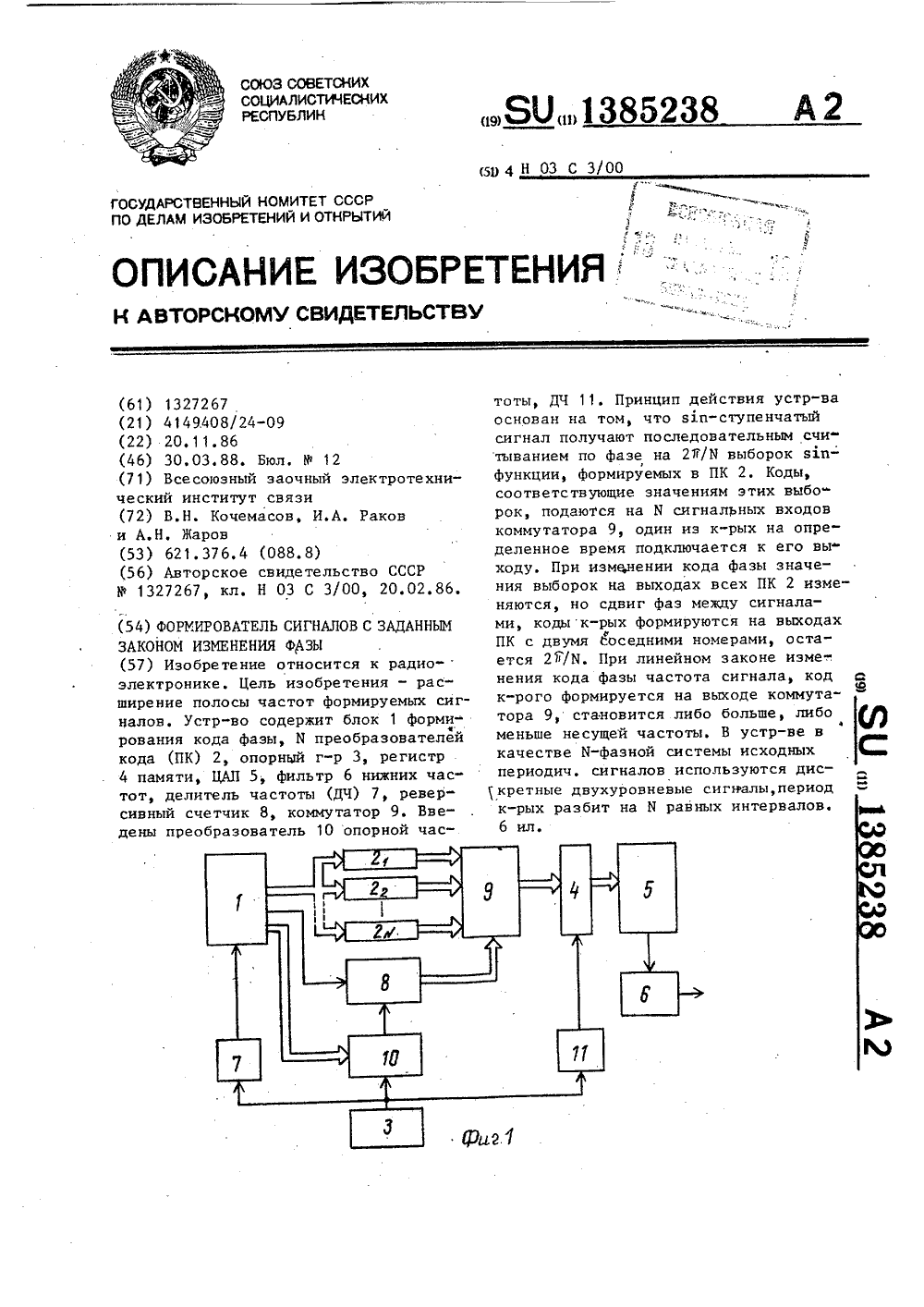
...разбит на 55И равных интервалов;(тп+п)шойИ - операция суммы помодулю И.В системе сигналов (7) в любоймомент времени отличен от нуля (т.е.равен 1) лишь один из сигналов, чтодает возможность реализовать алгоритм(6), последовательно передавая навыход соответствующие коды И-фаэнойсистемы синусоидальных функций фазы(1) .Предлагаемый формирователь сигналов с заданным законом изменения фазыпозволяет достичь высокой точностивоспроизведения заданного закона из-.менений фазы при одновременном снижении потребляемой мощности и расширении диапазона частот формируемыхсигналов, Это достигается переносомсигнала, сформированного на низкойчастоте, на несущую частоту, что позволяет максимально использовать разрядную сетку блока 1 формирования кода...
Формирователь сигналов с заданным законом изменения фазы

Номер патента: 1385239
Опубликовано: 30.03.1988
Авторы: Жаров, Кочемасов, Раков, Ревун, Соболев
МПК: H03C 3/00
Метки: заданным, законом, изменения, сигналов, фазы, формирователь
...14. С выхода каждого из ннх поступает либо прямой, либо инвертированныи код.В первом квадратурном канале сигнал управления инверсией, поступающийс выхода блока 8, является также старшим разрядом кода сигнала и поступаетна вход старшего разряда регистра 4памяти. То же самое происходит и вовтором квадратурном канале (сигнал свыхода блока 8 поступает на входстаршего разряда регистра 15 памяти.В случае, если число преобразова"телей 2, - 2кодов является степеньюдвойки, т.е. Х = 2, р = 2,3,4,блок 8 упрощается: реверсивный счетчик 28 становится двоичным и можнообъединить функции реверсивных счет-чиков 28 и 29 и делителя 30 частоты,как показано на фиг. Зб. В этом случае реверсивный счетчик 28 имеет емкость 2 , а один из входов...
Предыдущий патент: Антиблокировочная тормозная система
Следующий патент: Гидравлическая противоблокировочная тормозная система
Случайный патент: Шахтная погрузочная машина