Роботизированный станок
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1172499
Авторы: Самохвалов, Седов, Спроге, Шеповалов


Текст
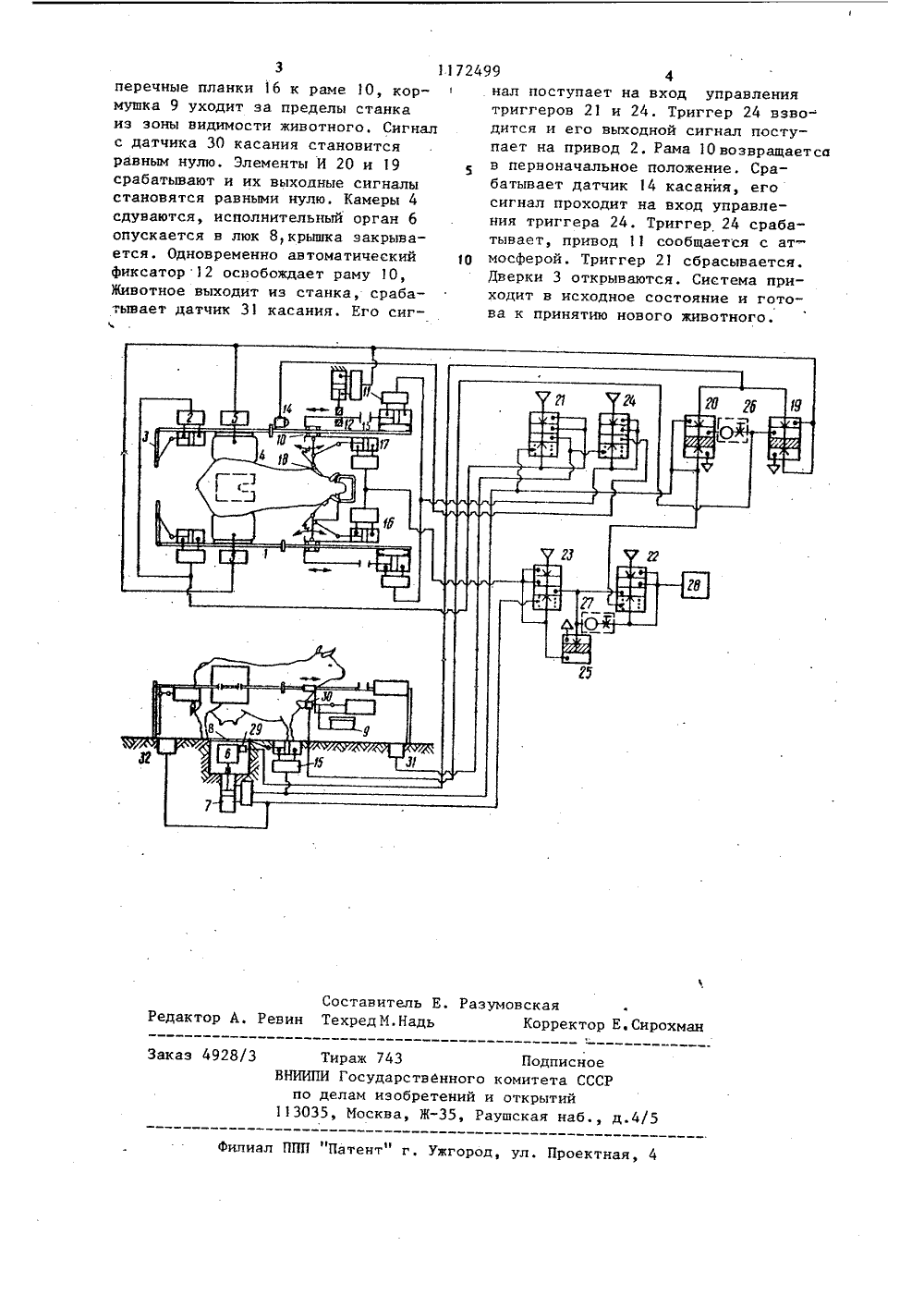
(51) 4 БРЕТЕН СТ ВТОРСНОМ ИДЕ чно-исследоваомплексных пробдля животноводсттва ч спол риГОСУДАРСТВЕННЫЙ НОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТ(71) Всесоюзный наутельский институт клем машиностроениява и кормопроизводс(54)(57) РОБОТИЗИРОВАННЫЙ СТАНОК,содержащий каркас с имеющими привод входными дверками, устройствофиксации животного, выполненное ввиде закрепленных на боковых стенках каркаса эластичных камер, соединенных с устройством подачи в нихсжатого воздуха, исполнительный орган преддоильной обработки выменис приводом вертикального перемещения, установленный в люке с крьппкой, и кормушку, о т л и ч а ющ и й с я тем, что, с целью повышения надежности работы, он снабжен рамой, установленной на выполненной на каркасе направляющей иимеющей привод и автоматическийфиксатор, установленным на переднейчасти каркаса датчиком касания, и водом крьппки люка, поперечнымипланками с приводом, которые шарнирно соединены с подпружиненными относительно них направляющими и установленными с возможностью взаимодействия с рамой, двумя элементамиИ, четырьмя триггерами, клапаном,двумя блоками задержки, устройствомуправления исполнительным органомпреддоильной обработки вымени, датчиком обнаружения вымени и тремядатчиками касания, при этом дат иккасания соединен с входом первогоэлемента И и через первый блок задержки - с входом второго элементаИ, вторые входы первого и второго элеметов Исоединены сдатчиком обнаружениявымени, выход первого элемента Исвязан с автоматическим фиксатороми устройством подачи сжатого газа,выход второго элемента И соединенс входом управления первого и второго триггеров и приводами соответственно вертикального перемещения и крышки люка, выход первого триггера подключен к приводу входных дверок, выход второго триггера под ключен к устройству управления и нительным органом преддоильной обработки вымени, а через второй блок задержки - с клапаном., 1172499Изобретение относится к сельскому хозяйству, н частности к устройствам для преддоильной обработкивымени коровы на животноводческихкомплексах. 5Цель изобретения - поньппение надежности работы,На чертеже изображена схема роботизированного станка.Роботизированный станок содержиткаркас 1 с имеющими привод 2 входными дверками 3, устройство фиксации животного, выполненное в видезакрепленных на боковых стенкахкаркаса эластичных камер 4, соединен ных с устройством 5 подачи в нихсжатого воздуха, исполнительный,орган 6 преддоильной обработки вь 1 мени с .приводом 7 вертикальногоперемещения, установленный и люке 8 с крьппкой, и кормушкой 9,раму 10, установленную на выполненной па каркасе 1 направляющей )3,и имеющей привод 11 и автоматический фиксатор 12, установленным напередней части каркаса 1 датчиком 14касания, принодом 15 крьппки люка 8,поперечными планками 16 с приводом 17, которые шарнирно соединены.с подпружиненными относительно них ЗОнаправляющими 18 и установленными свозможностью взаимодействия с рамой 1 О, два элемента И 19 и 20,четыре триггера 21 - 24, клапан 25,дна блока 26 и 27 задержки, уст- З 5ройстно 28 управления исполнительным органом 6 преддоильной обработки вымени, датчик 29 обнаружениявымени и три датчика касания, приэтом датчик касания соединен с 40входом первого элемента И и черезпервый блок 26 задержки - с входомвторого элемента И 20, вторые входы первого и второго элементов И 19и 20 соединены с.датчиком 29 обнаружения вымени, выход первого элемента И 19 связан с автоматическимфиксатором 12 и устройством 5 подачисжатого газа, выход второго элемента И 20 соединен с входом управления первого 21 и второго 22 триггеров, и приводами 7 и 15 соответственно вертикального перемещенияи крышки люка, выход первого триггера 2 подключен к приводу 2 вход- .55ных дверок 3, выход второго триггера 22 подключен к устройству 28управления исполнительным органом 6 преддоильной обработки вымени, а через второй блок 27 задержки " с клапаном 25. На раме О установлен датчик 30 касания.Роботизированный станок рабо 1 ает следующим образом.Животное входит в станок, касается датчика 30 касания, расположенного на раме 10. Сигнал с датчика 30 касания поступает на вход элемента И 19 и через блок 26 задержки - на вход элемента и 20. Животное движется вперед, следуя за кормушкой 9, и касается выменем датчика 29 обнаружения вымени, сигнал от которого поступает навторые входы управления элементов И 19 и 20. Элемент И 19 срабатывает и его выходной сигнал проходит на устройство 5 подачи сжатого воздуха и привод 11 фиксирует раму О, автоматическим фиксатором 12, при этом подпружиненные направляющие 18 позволяют корове спокойно дотянуться до кормушки 9. Одновременно под давлением подают воздух н камере 4, которые надуваясь, ориентируют животное по центру станка. Таким образом, происходит совмещение координат вымени и люка 8, в котором располагается исполнительный орган 6, Через время, определенное настройкой регулируемого пневмосопротивления, входящего в блок задержки 26, срабатывает элемент И 20, Его выходной сигнал поступает на вход взвода триггера 21, привод 15 крышки люка 8, привод 7 вертикального перемещения и на вход взвода триггера 22, Триггер 21 взводится, его выходной сигнал поступает на при-. вод 2, Дверки 3 закрываются. Открывается крьппка и из люка 8 поднимается исполнительный орган 6, Одновременно взводится триггер 22, выходной сигнал которого поступает на вход устройства 28 управления исполнительным органом и исполнительный орган 6 начинает работу, Одновремено выходной сигнал триггера 22 проходит на блок 27 задержки и через время, определяемое настройкой входящего н него регулируемого пненмосопротивления, поступает на свой вход сброса и вход триггера 23, Триггер 23 сбрасывается и включается привод 1, который притягивает поСоставитель Е. РазумовскаяРедактор А. Ревин ТехредМ.Надь Корректор Е.Сирох Заказ 4928 Тираж 743 ПодписиНИИПИ Государственного комитета Спо делам изобретений и открытий13035, Москва, Ж, Раущская наб д.4 илиад ППП "Патент" г. Ужгород, ул, Проектная, 4 3перечные планки 16 к раме 1 О, кормушка 9 уходит за пределы станка из зоны видимости животного. Сигнал с датчика 30 касания становится равным нулю. Элементы И 20 и 19 срабатывают и их выходные сигналы становятся равными нулю. Камеры 4 сдуваются, исполнительный орган 6 опускается в люк 8,крышка закрывается. Одновременно автоматический фиксатор 12 освобождает раму 1 О, Животное выходит из станка, срабатывает датчик 31 касания. Его сиг 1172499 4нал поступает на вход управления триггеров 21 и 24. Триггер 24 взво- дится и его выходной сигнал поступает на привод 2, Рама 10 возвращаетса5в первоначальное положение. Срабатывает датчик 14 касания, его сигнал проходит на вход управления триггера 24, Триггер 24 срабатывает, привод 11 сообщается с атмосферой. Триггер 21 сбрасывается.Дверки 3 открываются. Система приходит в исходное состояние и готова к принятию нового животного.
СмотретьЗаявка
3598921, 07.04.1983
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ КОМПЛЕКСНЫХ ПРОБЛЕМ МАШИНОСТРОЕНИЯ ДЛЯ ЖИВОТНОВОДСТВА И КОРМОПРОИЗВОДСТВА
СЕДОВ АЛЕКСЕЙ МИХАЙЛОВИЧ, ШЕПОВАЛОВ ВЯЧЕСЛАВ ДМИТРИЕВИЧ, СПРОГЕ ЕВГЕНИЙ ЭДУАРДОВИЧ, САМОХВАЛОВ АНДРЕЙ ЕВГЕНЬЕВИЧ
МПК / Метки
МПК: A01J 7/00
Метки: роботизированный, станок
Опубликовано: 15.08.1985
Код ссылки
<a href="https://patents.su/3-1172499-robotizirovannyjj-stanok.html" target="_blank" rel="follow" title="База патентов СССР">Роботизированный станок</a>
Устройство приема дискретных сигналов
Номер патента: 543178
Опубликовано: 15.01.1977
Авторы: Вакуров, Гордиенко, Гурвиц, Кратистова
МПК: H04L 5/02
Метки: дискретных, приема, сигналов
...содержит вход 14 устройства приема дискретных сигналов, выход 15.Выходы коммутатора 1 подключены соответственно к входу и выходу детектора 2, выход усилителя 3 подключен к входам преобразователей 4 и 5 квазитроичных и биимпульсных сигналов в двоичные и блока 6 синхронизации, дополнительный выход которого подключен к управляющему входу преобразователя 5 биимпульсных сигналов в двоичные. Выходы преобразователей 4 и 5 квазитроичных сигналов и биимпульсных сигналов в двоичные подключены к соответствующим входам коммутатора 1.Вход и выход первого элемента 7 задержки и входы и выходы второго элемента 8 задержки через дишифратор 9 подключены к соответствующим входам управляемого опорным генератором 10 основного делителя 11 частоты, выходы...
Устройство для передачи и приема информации

Номер патента: 1104571
Опубликовано: 23.07.1984
Авторы: Алиев, Кадымов, Мамедов
МПК: G08C 19/28
Метки: информации, передачи, приема
...входом первого триггера, выход второго элемента ИЛИ соединен с третьим входом регистра сдвига, выход которого подключен к второму входу второго элемента ИЛИ, другиевыходов регистра сдвига являютсяшестьпч выходом блока управления,первый и третий выходы котооогоявляются соответственно (Р) и01-3) выходами регистра сдвига,(Р) выход которого подключен к 5второму входу второго элемента И,выход которого и выход элемента за- .держки являются соответственно пятыми седьмым выходами блока управления,причем Р = 1 о1 где о - частотагенератора импульсов, 11 - частотапреобразования,Блок управления приемного пункта содержит регистр сдвига, первую и вторую группу элементов И, триггеры, элементы задержки, элементы И и элементы ИЛИ, выход последнего...
Устройство для дистанционной синхронизации телевизионной камеры

Номер патента: 1462512
Опубликовано: 28.02.1989
Авторы: Лучихин, Первушкин, Уханов
МПК: H04N 5/06
Метки: дистанционной, камеры, синхронизации, телевизионной
...напряжения,которое воздействует на .управляемыйгенератор 2 и изменяет его частоту ифазу. При этом при опережении синхроимпульсов, сравниваемых в фазовом детекторе 7, на выходе четвертого хроимпульсы строк и полей, синхронные и через первый канал 8 связи подают,ся в селектор 6 синхроимпульсов. Так замыкается петля обратной связи сис35 5 14625темы автоподстройки частоты и фазыстрок,Обычно длина кабеля не превышаетполутора километров, что при среднейзадержке распространения сигнала вкабеле 5 МКС/КМ соответствует суммарной максимальной задержке распространения 15 МКС, состоящей из задержкираспространения при передаче видеосигнала с камерной головки на камерный канал и задержки распространенияКСК и не превышающей четверти...
Устройство для приема частотно-фазоманипулированных сигналов

Номер патента: 1140262
Опубликовано: 15.02.1985
Авторы: Бакулин, Журавлев, Ильин
МПК: H04L 27/14, H04L 27/32
Метки: приема, сигналов, частотно-фазоманипулированных
...фильтров, первый перемножитель 7, второй смеситель 8, гетеродин 9, генератор 10 псевдослучайной пос 4 Оледовательности, дешифратор 11, формирователь 12 меандра, первый элемент 13задержки, усилитель 14, второй перемножитель 15, узкополосный фильтр 16,амплитудный детектор 17, третий перемножитель 18, фильтр 19 нижних частот,соответственно второй, третий и четвертый элементы 20-22 задержки. Блок 3синхронизации состоит из (фиг. 2)первого, второго и третьего перемно Ожителей 23-25 соответственно, первого 26 и второго 27 узкополосныхфильтров, фильтра 28 нижних частот,усилителя 29, первого 30 и второго31 сумматоров, вычитающего блока 32, 55управляемого тактового генератора 33Устройство работает следующим образом. 4На вход устройства...
Устройство для воспроизведения цифровой магнитной записи

Номер патента: 1458885
Опубликовано: 15.02.1989
Авторы: Дектярев, Жуковский, Кот, Юмашев
МПК: G11B 5/09
Метки: воспроизведения, записи, магнитной, цифровой
...воздействует через четвертыйэлемент 55 задержки на третий триггер 20 и непосредственно на управляемый генератор 29 импульсов, преобразующий импульсы синхронизации в высокочастотную импульсную последовательность, период следования которойнесет информацию о колебаниях скорос-"ти перемещения носителя магнитнойзаписи. Эта высокочастотная последовательность импульсов поступает наделитель 30 частоты, обеспечивающийсогласование частоты с дискретнымизменением скорости перемещения. носителя магнитной записи. При этомделитель 30 частоты воздействует напятый и седьмой элементы И 14 и 16,что обеспечивает учет изменений ско-рости перемещения носителя магнитнойзаписи при замещении сигналов, приформировании удвоенной частоты и придемодуляции...
Предыдущий патент: Способ доения новотельных коров в родильном отделении животноводческой фермы
Следующий патент: Устройство для раздачи кормов
Случайный патент: Устройство регистрации однополярных однократных импульсов