Устройство моделирования пространственных движений оптического изображения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1088058
Авторы: Волков, Григорович, Карпов, Красностанов, Пекки, Трайбер

Текст
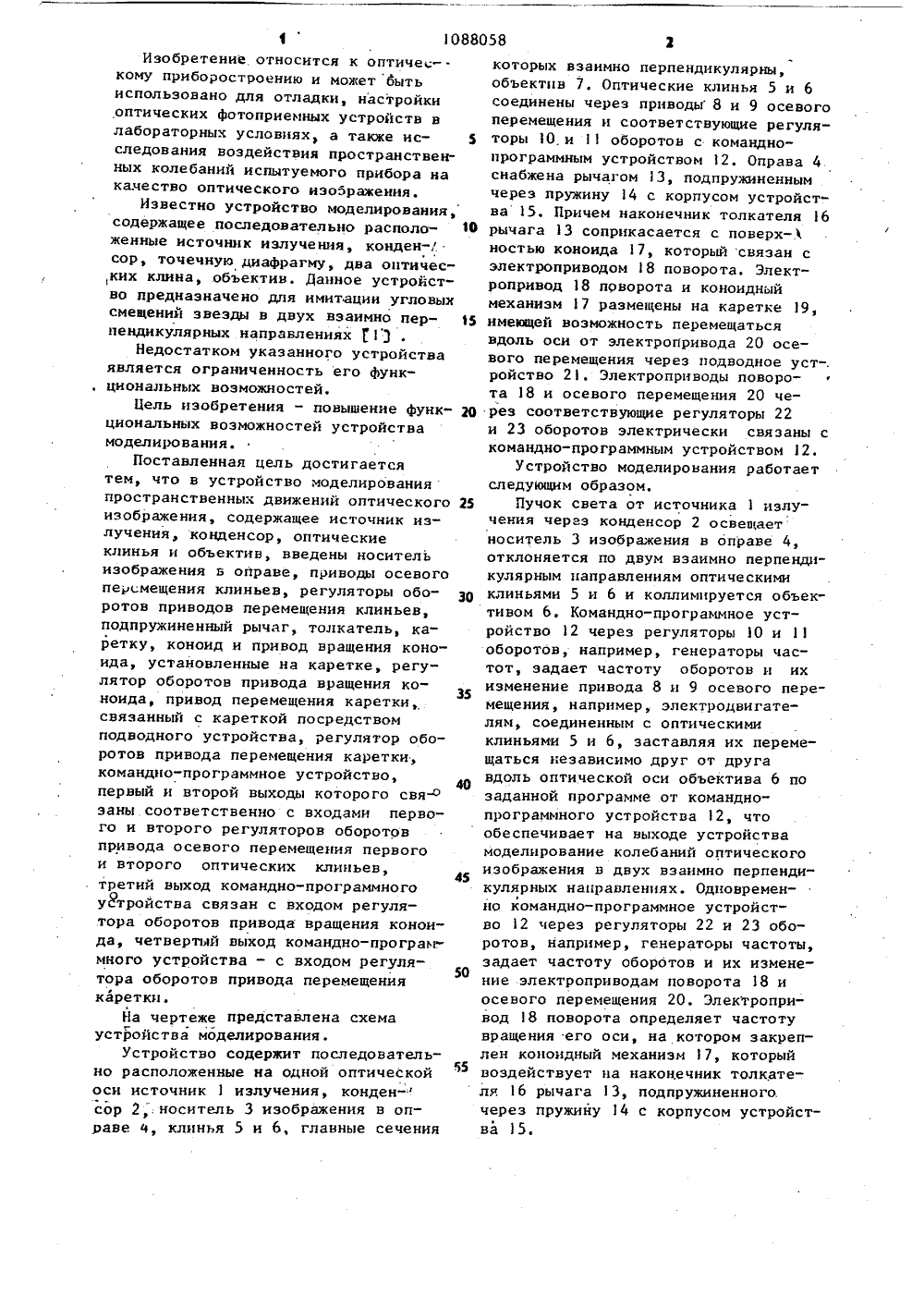
(19) 01) 8 ли 151) С 09 В ще ес рения ег тей, в н жения в мещения приводов р(54)(57) УСТРОЙСТВО МОДЕЛИРОВАНИЯПРОСТРАНСТВЕННЫХ ДВИЖЕНИЙ ОПТИЧЕСКОГО ИЗОБРАЖЕНИЯ, содержащее источникизлучения, конденсор, оптическиеклинья и объектив, о т л и ч а ю -я тем, что, с целью расшио функциональных возможнос-.его введены носитель изобраоправе, приводы осевого пе е-,клиньев, регуляторы оборотовперемещения клиньев, подпрухнненный рычаг, толкатель, каретку, кононд и привод вращения коноида, установленные на каретке, регулятор оборотов привода вращения коноида, привод перемещения каретки, связан", ныл с кареткой посредством подводного устройства, регулятор оборотов привода перемещения, каретки, командно-программное устройство, первый и второй выходы которого связаны со" ответственно с входами первого и второго регуляторов оборотов привода осевого перемещения первого и второго оптических клиньев, третий выход командно-программного устройства связан с входом регулятора оборотов привода вращения коноида, четвертый выход командно-программного уст" ройства - с входом регулятора оборотов привода перемещения каретки.которых взаимно перпендикулярны, объектив 7, Оптические клинья 5 и 6 соединены через приводы 8 и 9 осевого перемещения и соответствующие регуляторы 10.и 11 оборотов с командно- программным устройством 12. Оправа 4 снабжена рычагом 13, поцпружиненным через пружину 14 с корпусом устройства 15. Причем наконечник толкателя 16 рычага 13 соприкасается с поверх-.1 ностью коноида 17, который связан с электроприводом 18 поворота. Электропривод 18 поворота и коноидный механизм 17 размещены на каретке 19, имеющей возможность перемещаться вдоль оси от электропривода 20 осевого перемещения через подводное уст-. ройство 21, Электроприводы поворо- ф та 18 и осевого перемещения 20 через соответствующие регуляторы 22 и 23 оборотов электрически связаны с командно-программным устройством 12.Устройство моделирования работает следующим образом.Пучок света от источника 1 излучения через конденсор 2 освещает носитель 3 иэображения в оправе 4, отклоняется по двум взаимно перпендикулярным направлениям оптическими клиньями 5 и 6 и коллимпруется объективом 6. Командно-программное устройство 12 через регуляторы 10 и 11 оборотов, например, генераторы частот, задает частоту оборотов и их изменение привода 8 и 9 осевого перемещения, например, электродвигателям, соединенным с оптическими клиньями 5 и 6, заставляя их перемещаться независимо друг от друга вдоль оптической оси объектива 6 по заданной программе от командно- программного устройства 12, что обеспечивает на выходе устройства моделирование колебаний оптического изображения в двух взаимно перпендикулярных направлениях. Одновременно командно-программное устройство 12 через регуляторы 22 и 23 оборотов, например, генераторы частоты, задает частоту оборотов и их изменение электроприводам поворота 18 и осевого перемещения 20. Электропривод 18 поворота определяет частоту вращения его оси, на котором закреплен коноидный механизм 7, который воздействует на наконечник толкателя 16 рычага 13, подпружиненного. через пружийу 14 с корпусом устройства 15.з 1088058 4Рычаг 13 воздействует на оправу 4 тов и электропривод 20 осевого перес носителем 3 иэображения в резуль- мещения с приводи " 21,Уприводным устройством " тате чего возникают колебания носителя 3 иэображения, что обеспечивает В Результате наложения колебаний на выходе устройства моделированиеоптического изображражения в двух взаимколебаний оптического изображения но перепендикулярныярных направлениях, вокруг оптической оси объектива 7. образуемых оптическимискими клиньями, и Изменение амплитуды колебаний.во вре" .колебаний оптического изображенйя мени производится путем перемещения вокруг оптической оси объективаУ каретки 19 с установленным на ней1 О образуемых колебаниями носителя . коноидным механизмом 17 относитель- изображения, на выходе устройства но наконечника толкателя 6 и выпол- . моделируются пространственные коленяется от командно-программного уст- бательные движения оптического иэобраройства 12 через регулятор 23 оборо- жения.Составитель А, ВасинРедактор Т. Кугрышева Техред Т.Дубинчак Корректор Г.0 гарЗаказ 2679/49 Тираж 447 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5 Филиал ППП "Патент", г. Ужгород, ул, Проектная,4
СмотретьЗаявка
3574867, 11.01.1983
ПРЕДПРИЯТИЕ ПЯ А-3771
ТРАЙБЕР АЛЬБЕРТ СЕМЕНОВИЧ, КРАСНОСТАНОВ РУДОЛЬФ ГЕОРГИЕВИЧ, ПЕККИ ГЕРМАН РУДОЛЬФОВИЧ, ГРИГОРОВИЧ АРНОЛЬД МСТИСЛАВОВИЧ, ВОЛКОВ РИНАД ИСМАГИЛОВИЧ, КАРПОВ АЛЕКСЕЙ ИВАНОВИЧ
МПК / Метки
МПК: G09B 23/22
Метки: движений, изображения, моделирования, оптического, пространственных
Опубликовано: 23.04.1984
Код ссылки
<a href="https://patents.su/3-1088058-ustrojjstvo-modelirovaniya-prostranstvennykh-dvizhenijj-opticheskogo-izobrazheniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство моделирования пространственных движений оптического изображения</a>
Устройство для привода продольного транспортера кормораздатчика

Номер патента: 1576083
Опубликовано: 07.07.1990
Авторы: Брагинец, Гопка, Кисляк, Литвинов, Марьенко, Новицкий, Остапенко, Федченко
МПК: A01K 5/00
Метки: кормораздатчика, привода, продольного, транспортера
...фиксаторы в виде секторов 31 и 32.Устройство работает следующим образом.При вращении шестерен 2 и 3 и одновременном вращении кривошипов 8 и 9 от 0 до 180Указано стрелками) шатун 6 упирается своим упором 12 во втулку 10 и поворачивает серьгу 14 с собачкой 20 и храповым колесом 19 против часовой стрелки, совершая рабочий ход. При дальнейшем вращении кривошипа 8 от 180 до 360 совершается холостой ход, при котором серьга 14 под действием пружины 16 поворачивается по часовой стрелке до контактирования упора 27 с втулкой 23, При этом собачка 20 проскальзывает по зубьям храпового колеса, Необходимый угол поворота последнего за один оборот кривошипа 8 устанавливается перемещением в заданное положение штока 25 при помощи рычага 29 с с его...
Устройство управления приводом полуавтоматической швейной машины

Номер патента: 2000365
Опубликовано: 07.09.1993
Автор: Солдатов
МПК: B65H 63/032, D05B 51/00
Метки: полуавтоматической, приводом, швейной
...лог,О. Независимо от значений выходнь)х сигналов с датчиков 8 и 9 на Я-входе триггера 16 устанавливается лог,1, а на В-входе - лог.О, соответственно на выходе триггера 16 устанавливается лог.О. Выходной согласующий элемент 17, инвертиру 1 и усиливая этот сигнал, подает его на вход задатчика 6 скорости привода, никак не 41 зменяя ее состояния. С выхода ин )ертпра 14 на В-вход счетчика 11 поступает лог.1, обнуляя его, После пуска полуавтомата на шитье на одном из выходов Ь или с (или на обоих сразу) выходной шины задатчика 6 скорости привода появляется лог.О, котооый, преобразуясь в лог,1 на выходе элемента И-НЕ 15, поступает на третий вход элемента И-НЕ 10, Р-вход триггера 16 и на инвертор 14 Главный вал швейной головки...
Механизм для перемещения сварочного устройства

Номер патента: 1174218
Опубликовано: 23.08.1985
Авторы: Дергалев, Малашонок, Ротштейн, Харитонов
МПК: B23K 31/06, B23K 37/02
Метки: механизм, перемещения, сварочного, устройства
...на ползунах, а другими - на регулировочном диске эксцентрично оси его поворота.На чертеже показан предлагаемый механизм, обший вид.Устройство состоит из подпружиненных захватов 1 с пазами 2, установленными на исполнительном органе 3 - ободе план шайбы автомата - таким образом, чтобы пазы 2 охватывали торец обода 3 и с другой стороны захваты 1, шарнирно соединенные с исполнительными рычагами 4, которые, в свою очередь, также шарнирно прикреплены к штоку 5 магнитного привода 6 З 0 возвратно-поступательного перемещения. При этом захваты с рычагами расположены снаружи исполнительного органа 3 и симметрично относительно его оси. На каждом из приводных рычагов 4 находятся ползуны 7, шарнирно связанные тягами 8 с регулировочным диском 9,...
Устройство для формирования корректирующего воздействия через привод программного регулятора

Номер патента: 1427329
Опубликовано: 30.09.1988
МПК: G05B 11/26
Метки: воздействия, корректирующего, привод, программного, регулятора, формирования
...что препятствует поступлению стробированных импульсов программного перемещения на выход дискриминатора 10 через элемент И 34 в диапазоне рабочих скоростей рабочего органа программного регулятора, По мере разгона двигателя на холостом ходу период следования импульсов программногоперемещения становится меньше первого порога срабатывания реле 7 времени, и на вход включения реле 7 вре" мени начинают поступать импульсы,устанавливающие триггер 30, при этом происходит формирование выходных им 30 перемещения в реверсивный накопитель6 в соответствии с характеристикой 35 1. Устройство для формирования корректирующего воздействия через привод программного регулятора, содержащее генератор импульсов, подключенный первым выходом к синхро-входу...
Устройство управления приводом швейной машины

Номер патента: 698536
Опубликовано: 15.11.1979
Автор: Икунори
МПК: D05B 69/02
...с двуплечимрычагом 39, одно плечо которого подпружинено, а другое связано с толкателем 40, связан.ным шарнирно с рычагом 41, расположеннымнад игольной пластиной 42. 6 4Подвижный нож 43 расположен под игольной пластиной и крепится с ней с помощью винта 44, Нож 43 связан с рычагом 41 посредством детали 45. Неподвижный нож 46 прикреплен кигольной пластине 42.Для включения швейной машины нажимают на педаль, соединенную с рычагом 28, в резуль. тате чего последний поворачивается до тех пор, пока рычаг не упрется в стопор 27 на блокирующей детали 26. В результате этого ролйк 47 выходит из впадины 48 управляющего ку. пачка 49, имеющего цилиндрическую поверхность с центральным углом 296, прямолинейные участки 50 и 51 с центральными угламио о8 и...
Предыдущий патент: Тренажер сварщика
Следующий патент: Демонстрационный стенд
Случайный патент: Электропривод постоянного тока с минимизацией потерь в двигателе