Способ управления гистерезисным двигателем гироприбора
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
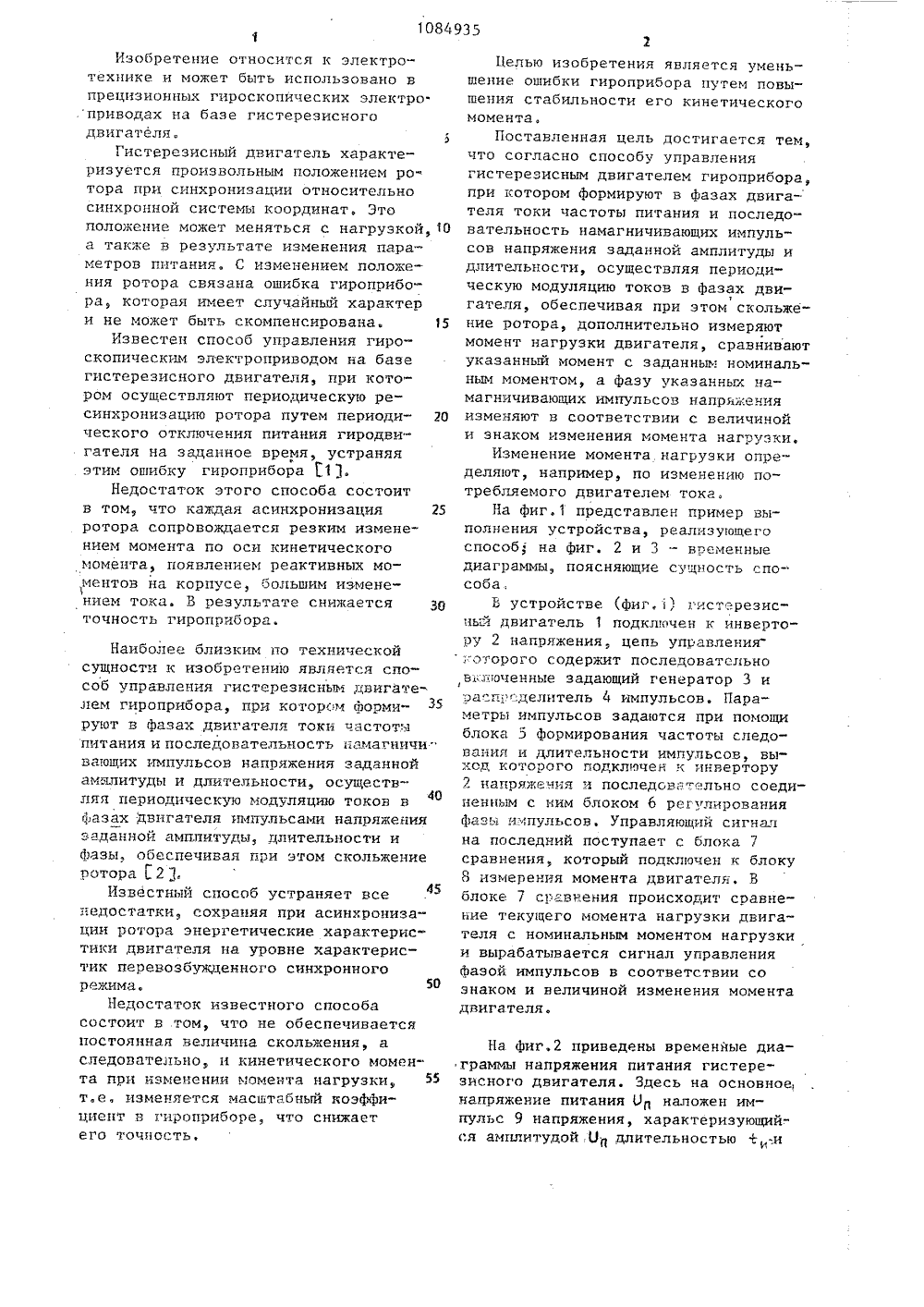
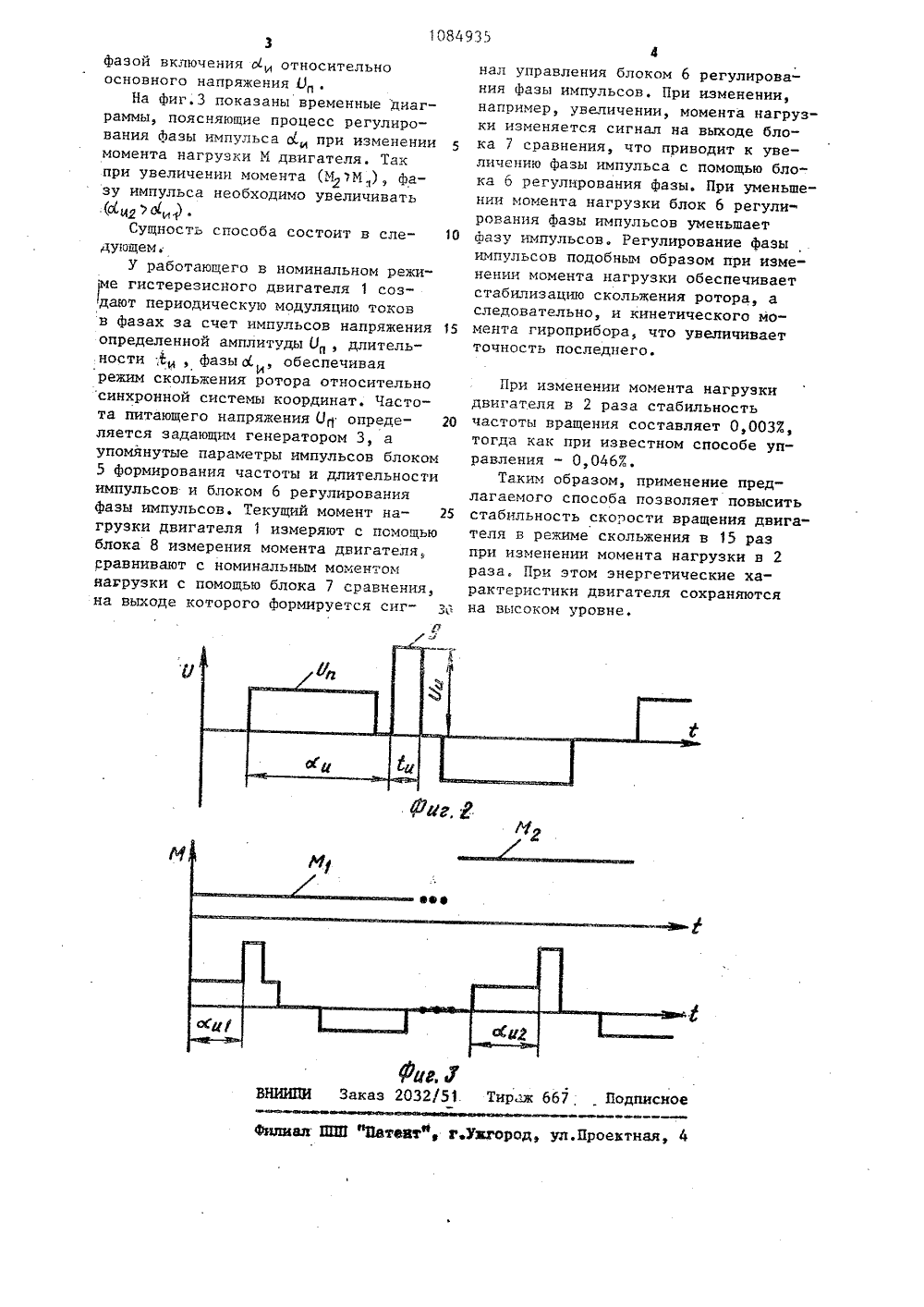
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИН А 2 Р 7 цй комитет сссРЕТЕНИЙ И ОТНРЫТИ ГОСУДЮ СТВЕННПЮ ДЕЛАМ ИЗ ЗОБРЕТЕН ИНТЕЛЬСТВУ ИСАНИЕ И АВТОРСКОМУ С(71) Московский ордордена Октябрьской Ртический институт(53) 621.313-39-83( отором ф рмируют в фазах ты питания и по игателядователь токи частность нампряжения ичивающих им льсов наы и длииодическую и В,Н. Тарасовна Ленина и,еволюции энерге заданно осуще токов амплит вляя п ьнос модуляцию обеспечив в фазах д этом скол а ю щ и й еньшения ош игателя пр жение рос я тем, ибки гиро 88. тора, о т что, с це прибора п его кинет ача питанияборов. "Ач 1 аЬпо 1 оеу",38-39. стая по . гиропр расе Те У 4, р. ния абильност дополнитем пов ческого ент тельно лзм гателя, срас заданным о ССС972. свиде02 Р льс 42,зу указа льсов на 4)(57) СПОСОСНЫМ ДВИГАТЕЛ УПРАВЛЕНИЯ ГИСТЕР М ГИРОПРИБОРА, пр ветствиинения мом(56) 1. Прерыв уменьшает дрей йьоп Меев апд 1962, чо 1. 77,2. Авторско У 534015, кл.,ЯО 108493 ряют момент нагрузки двивнивают указанный моментноминальным моментом, аных намагничивающих ииряжения изменяют в соот- Е величинои и знаком измета нагрузки.Изобретение относится к электротехнике и может быть использовано впрецизионных гироскопических электро. .приводах на базе гистерезисного двигателя.Гистерезисный двигатель характеризуется произвольным положением ротора при синхронизации относительно синхронной системы координат, Это положение может меняться с нагрузкой, 10 а также в результате изменения параметров питания. С изменением положения ротора связана ошибка гироприбора, которая имеет случайный характер и не может быть скомпенсирована. 15Известен способ управления гироскопическим электроприводом на базе гистерезисного двигателя, при котором осуществляют периодическую ресинхронизацию ротора путем периоди ческого отключения питания гиродви" гателя на заданное время, устраняя этим ошибку гироприбора Г 1.Недостаток этого способа состоит в том, что каждая асинхронизация 25 ротора сопровождается резким изменением момента по оси кинетического момента, появлением реактивных моментов на корпусе, большим изменением тока. В результате снижается З 0 точность гироприбора. Наиболее близким по техническойсущности к изобретению является способ управления гистерезисным двигателем гироприбора, при котором формируют в фазах двигателя токи частоты питания и последовательность намагничи" вающих импульсов напряжения заданной амплитуды и длительности, осуществляя периодическую модуляцко токов в фазах двигателя импульсами напряжения заданной амплитуды, длительности и фазы, обеспечивая при этом скольжениеротора 2.Известный способ устраняет всенедостатки, сохраняя при асинхронизации ротора энергетические характеристики двигателя на уровне характеристик перевозбужценного синхронного режима 50Недостаток известного способасостоит в том, что не обеспечиваетсяпостоянная величина скольжения, аследовательно, и кинетического момента при изменении момента нагрузки, 55т.е, изменяется масштабный коэффициент в гироприборе, что снижаетего точность,Целью изобретения является уменьшение ошибки гироприбора путем повышения стабильности его кинетическогомомента,Поставленная цель достигается тем,что согласно способу управлениягистерезисным двигателем гироприбора,при котором формируют в фазах двигателя токи частоты питания и последовательность намагничивающих импульсов напряжения заданной амплитуды идлительности, осуществляя периодическую модуляцию токов в фазах двитгателя, обеспечивая при этом скольжение ротора, дополнительно измеряютмомент нагрузки двигателя, сравниваютуказанный момент с заданным номинальным моментом, а фазу указанных намагничивающих импульсов напряженияизменяют в соответствии с величинойи знаком изменения момента нагрузки.Изменение момента нагрузки определяют, например, по изменению потребляемого двигателем тока.На фиг,1 представлен пример выполнения устройства, реализующего способ на фиг. 2 и 3 - временные диаграммы поясняющие сущность способа,В устройстве (фиг,11, гистерезисный двигатель 1 подключен к инвертору 2 напряжения, цепь управления.-оторого содержит последовательно ,влоченные задающий генератор 3 и ра прсделитель 4 импульсов. Параметры импульсов задаются при помощи блока 5 формирования частоты следования и длительности импульсов, выход которого подключен к инвертору 2 напряжения и последовательно соединенным с ним блоком 6 регулирования фазы импульсов. Управляющий сигнал на последний поступает с блока 7 сравнения, который подключен к блоку 8 измерения момента двигателя, В блоке 7 сравнения происходит сравнение текущего момента нагрузки двигателя с номинальным моментом нагрузки и вырабатывается сигнал управления фазой импульсов в соответствии со знаком и величиной изменения моментадвигателя. На фиг,2 приведены временйые диаграммы напряжения питания гистерезисного двигателя. Здесь на основное напряжение питания О 0 наложен импульс 9 напряжения, характеризующий" ся амплитудой 00 длительностью . -.и1084935 аказ 2032/51. Тираж 67 Подписно зфазой включения Ыи относительно основного напряжения Ц,.На фиг.З показаны временные диаграммы, поясняющие процесс регулирования фазы импульса с(, при изменении момента нагрузки М двигателя. Так при увеличении момента (М М), фазу импульса необходимо увеличивать (сиви 4Сущность способа состоит в сле дующем.У работающего в номинальном режи- Ге гистерезисного двигателя 1 создают периодическую модуляцию токов в фазах за счет импульсов напряжения 15 определенной амплитуды О, длительности 4, фазы Ы, , обеспечивая режим скольжения ротора относительно синхронной системы координат. Частота питающего напряжения (31 опреде ляется задающим генератором 3, а упомянутые параметры импульсов блоком 5 формирования частоты и длительности импульсов и блоком 6 регулирования фазы импульсов, Текущий момент на грузки двигателя 1 измеряют с помощью блока 8 измерения момента двигателя, сравнивают с номинальным моментом нагрузки с помощью блока 7 сравнения, на выходе которого формируется сиг- ЗрР нал управления блоком 6 регулирования Фазы импульсов. При изменении,например, увеличении, момента нагрузки изменяется сигнал на выходе блока 7 сравнения, что приводит к увеличению фазы импульса с помощью блока 6 регулирования фазы. При уменьшении момента нагрузки блок 6 регулирования фазы импульсов уменьшаетфазу импульсов. Регулирование фазыимпульсов подобным образом при изменении момента нагрузки обеспечиваетстабилизацию скольжения ротора, аследовательно, и кинетического момента гироприбора, что увеличиваетточность последнего. При изменении момента нагрузкидвигателя в 2 раза стабильностьчастоты вращения составляет О,ООЗЕ,тогда как при известном способе управления - 0,046 Е.Таким образом, применение предлагаемого способа позволяет повыситьстабильность скорости вращения двигателя в режиме скольжения в 15 разпри изменении момента нагрузки в 2раза. При этом энергетические характеристики двигателя сохраняютсяна высоком уровне,
СмотретьЗаявка
3350892, 06.11.1981
МОСКОВСКИЙ ОРДЕНА ЛЕНИНА И ОРДЕНА ОКТЯБРЬСКОЙ РЕВОЛЮЦИИ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ
ПОЗДНУХОВ СЕРГЕЙ ФЕДОРОВИЧ, ТАРАСОВ ВЛАДИМИР НИКОЛАЕВИЧ
МПК / Метки
МПК: H02P 7/36
Метки: гироприбора, гистерезисным, двигателем
Опубликовано: 07.04.1984
Код ссылки
<a href="https://patents.su/3-1084935-sposob-upravleniya-gisterezisnym-dvigatelem-giropribora.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления гистерезисным двигателем гироприбора</a>
Устройство для защиты трехфазной нагрузки от исчезновения фаз сети питания

Номер патента: 873327
Опубликовано: 15.10.1981
МПК: H02H 3/24
Метки: защиты, исчезновения, нагрузки, питания, сети, трехфазной, фаз
...О - напряжениестабилизации стабилитронов, ОА 0, ОВ,О в . линейные напряжения сети питанияф .1- моменты отпиранияфототиристоров,В мормальном режиме работы на зажимах А, В, С устройства для защитытрехфазной нагрузки от исчезновенияфаз сети питания действует трехфазная симметричная система напряжения,показанная на фиг. 2, При величинеподаваемого напряжения, большей на-пряжения стабилизации Ост стабилитронов, светодиод 12 обтекается током,В момент времени 1, (см. фиг. 2) нааноде тиристорной структуры напряжение достигает величины О послед-. няя под действием светового потока светодиода 12 открывается и остается в этом состоянии под действием протекающего через нее тока (импульс запуска после этого может быть снят). Одновременно ток...
Устройство для определения момента подачи импульса на разгон летучих ножниц

Номер патента: 380448
Опубликовано: 01.01.1973
Авторы: Кутлер, Мухина, Прошкин, Шагас
МПК: B23D 25/00, B26D 5/38
Метки: импульса, летучих, момента, ножниц, подачи, разгон
...11 и квадратора 12. Выходы блока 15, интегратора 10, усилителя 11, квадратора 12 и задатчика 13 соединены со входами суммирующего усилителя нуль-органа б.Датчик 1 может быть выполнен в виде тахогенератора, а датчик 2 - в виде фотореле.Устройство работает следующим образом.При перемещении переднего конца проката к неподвижным ножницам датчик 1 вырабатывает напряжение, пропорциональное скорости проката. Это напряжение усиливается в усилителе-задатчике 14, причем коэффициент усилителя задается оператором и определяет отношение скорости ножей ножниц 5 к скорости проката 2, вследствие чего выходное напряжение усилителя;задатчика 14 пропорционально скорости ножей ножниц.До момента подачи импульса на разгон ножниц 5 нуль-орган б закрывает...
Способ проверки момента трения опор поплавкового гироприбора

Номер патента: 657706
Опубликовано: 20.07.2005
Авторы: Бойко, Кузнецов, Люлечник, Рябов
МПК: G01C 19/00, G01C 25/00
Метки: гироприбора, момента, опор, поплавкового, проверки, трения
Способ проверки момента трения опор поплавкового гироприбора, при котором организуют режим электрической пружины прибора, вращают прибор относительно оси проверяемой опоры, контролируют ток электрической пружины и по нему определяют момент трения опоры, отличающийся тем, что, с целью повышения достоверности обнаружения дефекта в опорах, создают дебаланс поплавка изменением температуры прибора от номинального значения, устанавливают контролируемую ось в прямом и повернутом на 180° вертикальных положениях, по истечении расчетного времени движения поплавка по вертикали в зоне люфта опор контролируют изменение тока, которое не должно превышать заданного уровня.
Способ ориентации пластин при их транспортировке от ротора питания к сборочному ротору и устройство для осуществления способа

Номер патента: 724316
Опубликовано: 30.03.1980
МПК: B23P 21/00
Метки: ориентации, питания, пластин, ротора, ротору, сборочному, способа, транспортировке
...автомата питания 1 с радиальными лотками 2 для выхода пластин 3, образованными накладками 4, По периферии автомата выполнен 10 кольцевой упор 5 с прорезями 6 для прохода штырей (нечетных 7 а н четных 7 б) транспортной цепи 8.Транспортная цепь 8 огибает звездочки(не показаны), установленные на автомате питания 1 и роторе установки 9, между которыми установлен лоток 10 с копиром 11.Ротор установки 9 снабжен кулачком 12, который взаимодействует с ползунами 13, расположенными в каждой четной позиции 2 О ротора установки 9 и сочленяющимися со штырями 7 б транспортной цепи 8, В роторном автомате питания имеется кулачок 14.Устройство работает следующим обра- ЭОМ. 25При работе устройства, т. е. при враще нии обоих роторов, пластины 3 в...
Устройство для защиты трехфазной электроустановки от размыкания фазы, реверса чередования фаз и от нарушения симметрии чередования фаз

Номер патента: 888262
Опубликовано: 07.12.1981
Авторы: Малявин, Паршин, Поллер
МПК: H02H 7/08
Метки: защиты, нарушения, размыкания, реверса, симметрии, трехфазной, фаз, фазы, чередования, электроустановки
...3-4 закрыты, конденсатор 21 начинает заряжать ся через резистор 7, конденсатор 22 через резистор 8. Через заданное время,соответствующее углу, меньшему 60оэлектрических градусов, конденсатор 21заряжается до напряжения, при которомпроисходит пробой стабилитрона 25, после чего транзистор 20 открывается и5 ВО В 5 20 25 50 5 во5 55 тельный орган 26,Использование новых элементов - оптронных пар светодиод - фототранзистор выгодно отличает предлагаемое устройстчерез него происходит разряд конденсатора 22. Конденсатор 21 продолжает заряжаться до момента, когда начинает проводить ток светодиод 1, включенный меж ду фазами А и В, после чего через открывшийся фототранэистор 3 конденсатор 21 разряжается. С открытием фототранзистора 4...
Предыдущий патент: Электропривод
Следующий патент: Вибропривод (его варианты)
Случайный патент: Установка для удаления модельной массы на основе карбамида из литейных форм