Центробежный стенд
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1037188
Авторы: Евграфов, Каразин, Красильщиков, Семенов, Шестацкий



Текст
СОЮЗ СОВЕТСКИХ ОЦИАЛИСТИЧЕСКИХ СПУБЛИК И 9) Ъ.ЭО и 1(50 001 Р 21/00 ГОСУД АРС ДЕЛАМ О БРЕТЕН СВИДЕТЕЛЬ ТОРСИО Бюл. М 31льщиков, В.НИ.М. Семеновй ара по- Каий ордена Лениннститут им. М.И8. 8)ое свидетель601 М 7/00 фсвидетельст601 Р 21/00,) 531. 768 (О)(57) ЦЕНТРащий, платФор ство СССР1967.во СССР1977 НЫЙ КОМИТЕТ СССРОБРЕТЕНИЙ И ОТКРЫТИЙ(53 8156 кВ 2 ОБЕЖНЬЙ СТЕНД,.содерму с приводом, направ ляющие и противовесы, связанные друг,с другом шарнирным рычажным механиз-мом, дополнительный привод радиального перемещения кареток и противовесов, систему регулирования движения приводов, блоки управления, о тл и ч а ю щ и й с я тем, что, сцелью повышения точности воспроизведения испытательного воздействия, всистему регулирования дополнительновведены два блока моделирования программных движений приводов, входыкаждого из которых соединены с источниками программно-задаваемых сигналов управления, а выходы - с соответствующими блоками управления.Изобретение относится к испытательной технике и предназначено для динамических испытаний, например, навигационных приборов, определяющих и контролирующих параметры движения различных объектов.5Известен центробежный стенд,на котором возможно воспроизводить программные линейные ускорения за счет программного изменения радиуса вра" щения испытуемого изделия дополнитель 10ным приводом 131Однако в силу особенности конструкции на этом стенде невозможно воспроизводить ускорения, изменяющиеся с высокой интенсивностью (10.000 м/с .15 и выше) .Наиболее близким по технической сущности к изобретению является центробежный стенд, содержащий платформу с приводом, направляющие и противовесы, связанные друг с другом шар" нирным рычажным механизмом, дополнительный привод радиального перемещения кареток и противовесов, систему регулирования движения приводов, 25 блоки управления 1 23Существенным недостатком известного стенда является относительно низкая точность воспроизведения заданного программного" испытательного воздействия в силу неспособности системы, регулирования, состоящей Из двух разобщенных блоков управления, каждым из приводов в отдельности компенсировать динамические ошибки движения, порожденных взаимным влия- З 5нием приводов друг на друга.Цель изобретения - повышение точности воспроизведения испытательного, воздействия.Эта цель достигается эа счет то 40 го, что в центробежном стенде соР держащем платформу с приводом, на- правляющие и противовесы, связанные друг с другом шарнирным рычажным механизмом, дополнительный привод радиального перемещения кареток и противовесов, систему регулирования движения приводов, блоки управления, в систему регулирования дополнительно введены два блока моделирования программых движений приводов, входы каждого из которых соединены с источниками программно-задаваемых сигналов управления, а выходы - с соответствующими блоками управления.фа чертеже показана схема предлагаемого центробежного стенда.Стенд содержит платформу 1, приводимую во вращение основным электродвигателем 2. Испытуемое изделие 3 устанавливается в каретку 4, которая 60 . перемещается в радиальном направлении на платформе дополнительным электродвигателем 5 с помощью шарнирного рычажного механизма, связывающего с кареткой 4 вторую каретку 6 и противовесы 7 и 8, перемещающиеся по радиальным направляющим 9 и 10, закрепленным на платформе 1.Управление приводами стенда осуществляется системой регулирования,состоящей из источников программнозадаваемых сигналов управления 11и 12, блоков моделирования п 1 ограммных движений первого и второго приводов 13 и 14, блоков управления 15и 16 соответственно основным 2 идополнительным 5 электродвигателем.Первые входы блоков управления 15и 16 связаны с выходами датчиковугловых движений 17 и 18, вторые - свыходами 11 и 12, Первые входы блоковмоделирования программных движений13 и 14 соединены с выходом источника программно- задаваемых сигналов 11,вторые -.с выходом источника программно-задаваемых сигналов 12. Выходныесигналы блоков моделирования програм-,мных движений 13 и 14 поступают соответственно на третьи входы блоковуправления 15 и 16, выходные сигналыкоторых подаются на электродвигатели2 и 5,Устройство работает следующим образом,,Сигналы 00и Оо(С) от источников программно-задаваемых сигналов управления 11 и 12 попарно поступают на входы блоков 13 и 14, где происхо,дит формирование аналогов программных движений основного и дополнительного приводов 9 дри 9 прй) по соотношейиямфрй) =о,И ф,й(Р)+ Оо(О Ф (Р)1 Ргпр Ю=ОоН) 0 Ъ Ж+ООт ф(Р) (1)где 9 (р) - передаточная функцияосновного привода поуправляющему воздействию Оо (6ф. (Р) - передаточная функцияосновного привода поуправляющему воздействию 0(Р) - передаточная функциядополнительного привода по управляющему воздействию 00 И)ф (р) - передаточная функциядополнительного привода по управляющему воздействию 001(ЦТаким образом, уже на стадии формирования программного движения каждого из приводов производится автоматический учет их взаимного влияния друг на друга путем введения элементов, моделирующих реакцию одного привода на отработку сигнала управления другим приводом. В составе блоков 13 и 14 таковыми являются элементы, со10 37188 Составитель Н. ИараховскаяРедактор В. Лазаренко ТехредМ.Гергель Корректор О.Тигор Заказ 6002/47 Тираж 873ВНИИПИ Государственного комитета СССРпо делам изобретений и открытий113035, Москва, Ж, Раушская наб., д, 4/5 Подписное Филиал ППП фПатент", г. Ужгород, ул. Проектная, 4 ответствующие передаточным функциям Фг,(Р ) и 4 Ь (Р) . Сформированные аналоги программных движений приводов 9 прИ) и Фр И) подаются на третьи входы соответствующих блоков управления 15 и 16, в которых на первые входы поступают сигналы с выходов 17 и 18, характеризующие реальные законы движения приводов Ц и ЧЩ с сигналами ЧЮ и 9 дй) в блоках управления 15 и 16 формируются дополнительные управляющие сигналы О И) и ОяИ по соотношениямб,) =-. фВ.Р)О -%Н,)1 фбДО =-(с 14 ВФР)ЕФаф-Чэ 8) 3, Ю где 1 о д, - коэффициентыусиления, рдМ 1В тех же блоках происходйт сложе ние полученных дополнительных управляющих сигналов Ци 02с основными управляющими сигналами Оо И) и ОщЯ , поступающими с выходов 11. и 12 на вторые входы блоков управления 15 и 16. Результирующие управления О Ы) и ОИ) с выходов блоков управления 15 и 1 поступают на элек. тродвигатели приводов 2 и 5. При от:сутствии на приводах возмущающих моментов каждый привод движется в соот. ветствии с программой и сигналы ореальных движениях приводов Чер И)/ и 1 рсовпадают с сигналамйф(С).и Цпр (Ц ; тогда в соответствйи с (2) догюлнительные управляющие сигналы отсутствуют и на электродвигате.лн 2 и 5 подаются основные управляю щие сигналы Оо ) и Ощ Н), поступаю"щие от источников программно-задаваемых налряжений 11 и 12, что обеспечивает движение приводов в соответствии с программой. При появлении воз мущающего момента на одном иэ приводов и вызывающего отклонения закона движения, например, основного привода 2 от программного закона, в блоке управления 15 возникает разность между сигналом о реальном движении 9 Ю и аналогом фнпр, в результате чего образуется дополнительный управляющий сигнал 9 Щ , который накладываясь на основной программный сигнал Об И , компенсирует возникающее рассогласование движения основного привода с заданным по программе.Таким образом, использование встенде блоков моделирования програм,иных движений приводов стенда, соединенных. с источниками программно-задаваемых сигналов управления, выходы которых соединены с соответствующими блоками управления, позволяет повы-и сить точность воспроизведения испытательных воздействий.
СмотретьЗаявка
3444378, 21.05.1982
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. М. И. КАЛИНИНА
КРАСИЛЬЩИКОВ МИХАИЛ ЯКОВЛЕВИЧ, КАРАЗИН ВЛАДИМИР ИГОРЕВИЧ, ЕВГРАФОВ АЛЕКСАНДР НИКОЛАЕВИЧ, СЕМЕНОВ ИГОРЬ МИХАЙЛОВИЧ, ШЕСТАЦКИЙ ВИКТОР ВЛАДИМИРОВИЧ
МПК / Метки
МПК: G01P 21/00
Метки: стенд, центробежный
Опубликовано: 23.08.1983
Код ссылки
<a href="https://patents.su/3-1037188-centrobezhnyjj-stend.html" target="_blank" rel="follow" title="База патентов СССР">Центробежный стенд</a>
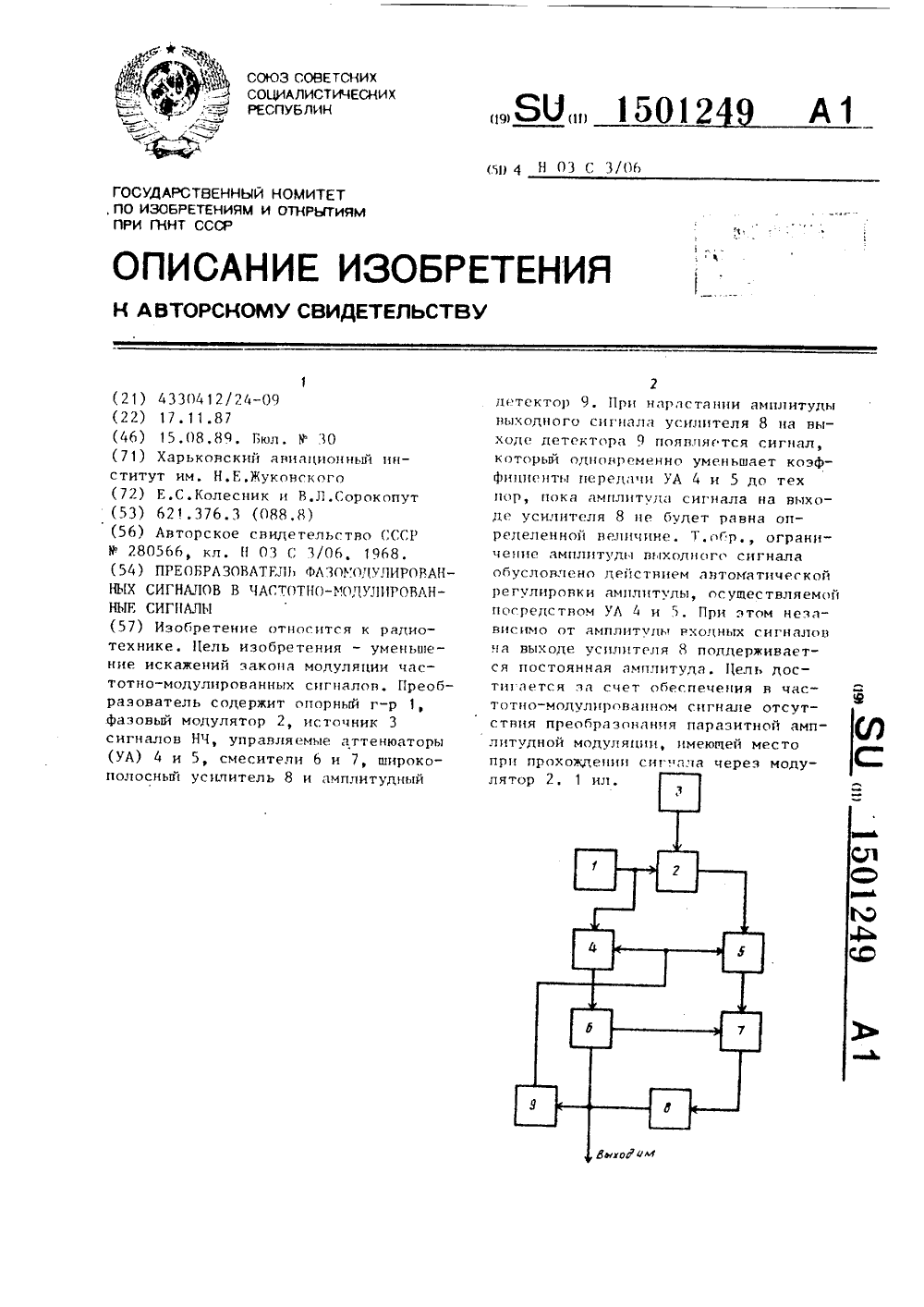
Преобразователь фазомодулированных сигналов в частотно модулированные сигналы
Номер патента: 1501249
Опубликовано: 15.08.1989
МПК: H03C 3/06
Метки: модулированные, сигналов, сигналы, фазомодулированных, частотно
...сигнала, поступающие на второй вход смесителя 6. После пребразвация в смесителях 6 и 7 эти флуктуации поступают на вход широкополосного усилителя Й.Таким образом, широкополосный усилитель 8 оказьнается охваченным це пью обратной связи, входом которой является вторй вход смесителя 6, а выходом - выход смесителя 7, Эта цепь обратной связи является четырехт- люсником братнси гнязи (ЧОС), 11 р 55 выполнении ус пццй ба 1 анса фаз ц амплитуд ц авго батеп цой сигтсме, образоваци и епццеццыми в кол ц,ипрон цпи ьм у цпцттп и 8 и 1 РС, цэцкают .иебацця с чагттой Г аавци й т раапсти фаз колебаний, п.тупанщих ца входы смесителей Ь и 7, Иа выходе смегитсля 6 вьде.нетс я ги цап с частотойгде Г- чагтота сигнала ца выходеаттецюаторов 4 и 5,Г -...
Электромагнитный привод возвратно-поступательного движения

Номер патента: 1169130
Опубликовано: 23.07.1985
Авторы: Апалькова, Джансугуров, Козлов, Ляшков, Пикулькин
МПК: H02P 7/62
Метки: возвратно-поступательного, движения, привод, электромагнитный
...снимаемый с выходной обмотки дополнительного датчика 9, в прямоугольный импульс, длительность которого равна длительности сигнала выходной обмотки датчика 9 и кото рый подается на второй вход элемента И 17.Четыре разомкнутые магнитные цепи, каждая из которых состоит из полюсных наконечников 24 обеих сис- И тем и из ферромагнитного цилиндра 22, одновременно замыкают в момент удара контактирующие якорь 4 и инструмент 5. Поэтому при подаче переменного напряжения на обмотки 25 воз буждения сигнал на выходных обмотках 26, т.е. сигнал на выходе дополнительного датчика 9, появляется в моменты контакта якоря 4 с инструментом 5. В иные моменты времени между якорем 4 и инструментом 5 возникает воздушный зазор, магнитное сопротивление которого...
Привод шагового вращательного движения

Номер патента: 370403
Опубликовано: 01.01.1973
МПК: F16K 31/53
Метки: вращательного, движения, привод, шагового
...четыре патрубка: патрубок 11 - для подачи управляющей среды в пневмодвигатель, патрубок 12 - для слива отработанной управляющей среды, патрубок 13 - для стодачи давления управляющей среды под плунжер 14, воздействующий на собачку 5, патрубок 15 - для подачи управляющей среды под плунжер 1 б, воздействующий на собачку 4. Промежуточная шестерня 10находиться в зацеплении с зубчатым колесом 9, которое жестко закреплено на валу 17,Привод шагового вращательного движения работает следующим образом. Давление управляющей среды в зависимости от требуемого направления вращения выходного вала 17 подается во впускной патрубок 11 пневмодвигателя и патрубок 13 или патрубки 11 и 15, обеспечивая подачу давления управляющей среды к пневмодвигателю 1 и...
Способ управления бесконтактным приводом возвратно поступательного движения

Номер патента: 437188
Опубликовано: 25.07.1974
Авторы: Базлов, Богданов, Божко, Захаревич, Крапивин, Сбоев
МПК: H02P 7/62
Метки: бесконтактным, возвратно, движения, поступательного, приводом
...и сближения их,при увеличении питающего напряжения, либо путем временной задержки сигнала с датчиков положения якоря при уменьшении питающего напряжения.Рассмотрим три возможных примера реализации описываемого способа.В первом случае датчики положения якоря выполнены подвижными в направлении движения якоря и связаны с серводвигателями, сближающими датчики при увеличении напряжения питания и раздвигающими их при уменьшении напряжения питания.Во втором случае датчики положения выполняются неподвижными, но содержат несколько секций. Здесь при увеличении напряжения подключают секции датчиков, расположенные ближе друг к другу, а при уменьшении напряжения - более удаленные секции.Очевидно, что изменение момента коммутации обмоток...
Механизм привода главного прямолинейного движения поперечно строгального станка

Номер патента: 933303
Опубликовано: 07.06.1982
Авторы: Волков, Волкова, Удалых
МПК: B23D 7/10
Метки: главного, движения, механизм, поперечно, привода, прямолинейного, станка, строгального
...на нем и, следовате о льно, снижается развиваемый им вращающий момент.При этом обмотки электродвигателя 19 имеют полное внутреннее сопротивление, большее, чем у электродвигателя 21. Так как обмотки электродвигателей 19 и 21 обтекаютсяодним и тем же током, то, следовательно, падение напряжения на обмотках электродвигателя 19 увеличивается, а на электродвигателе 21уменьшается. увеличение напряженияна электродвигателе 19 способствуетвозрастанию (по квадратичной зависимости) его вращающего момента,который, суммируясь с моментом отсил упругости сжатой пружины 10,действующей на валы электродвигателей 19 и 21, имеет знак, согласныйс моментом электродвигателя 19, ивеличину, достаточную для запускаэлектродвигателя 19.При этом ходовой...