Контурная система программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки








Текст
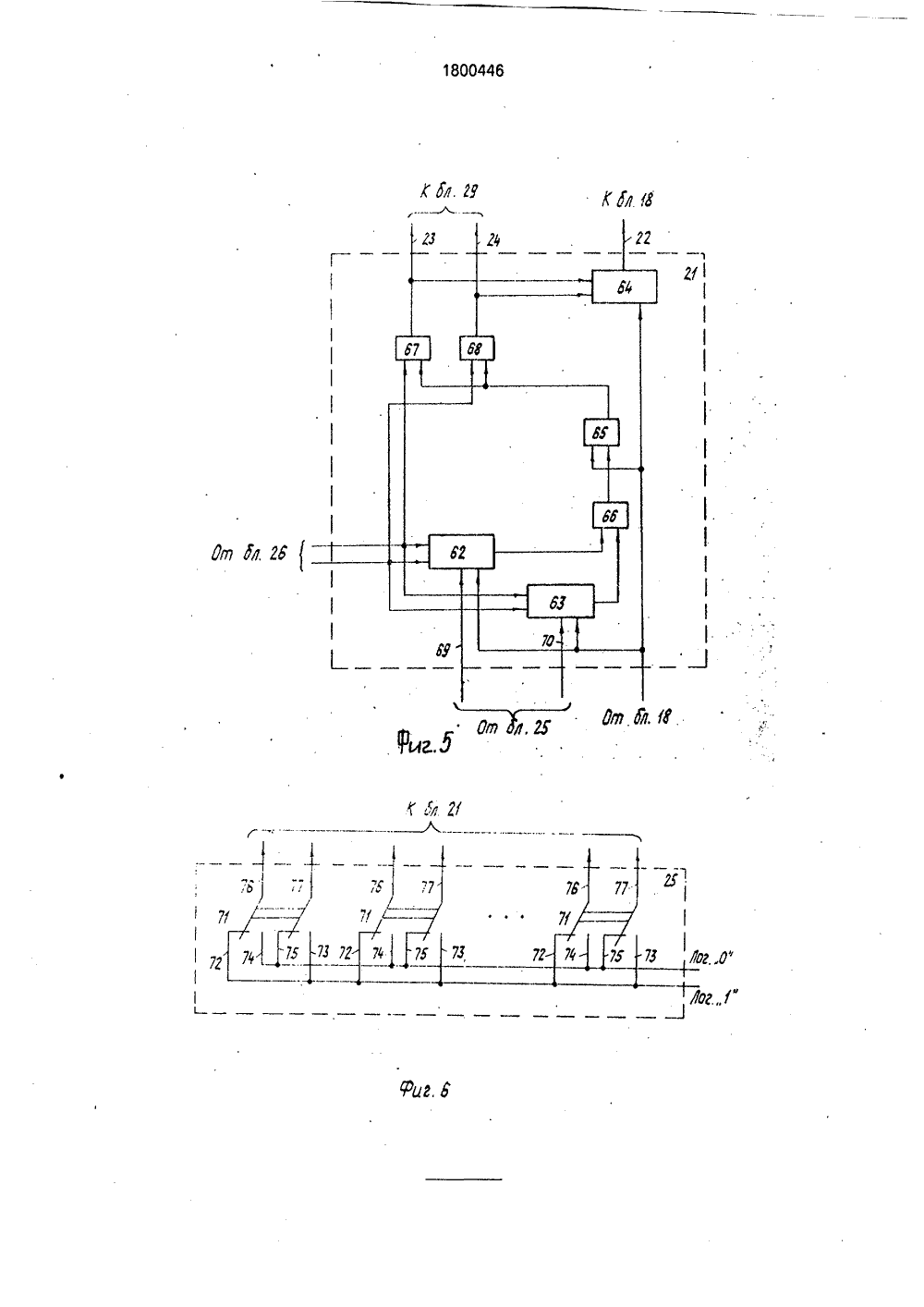
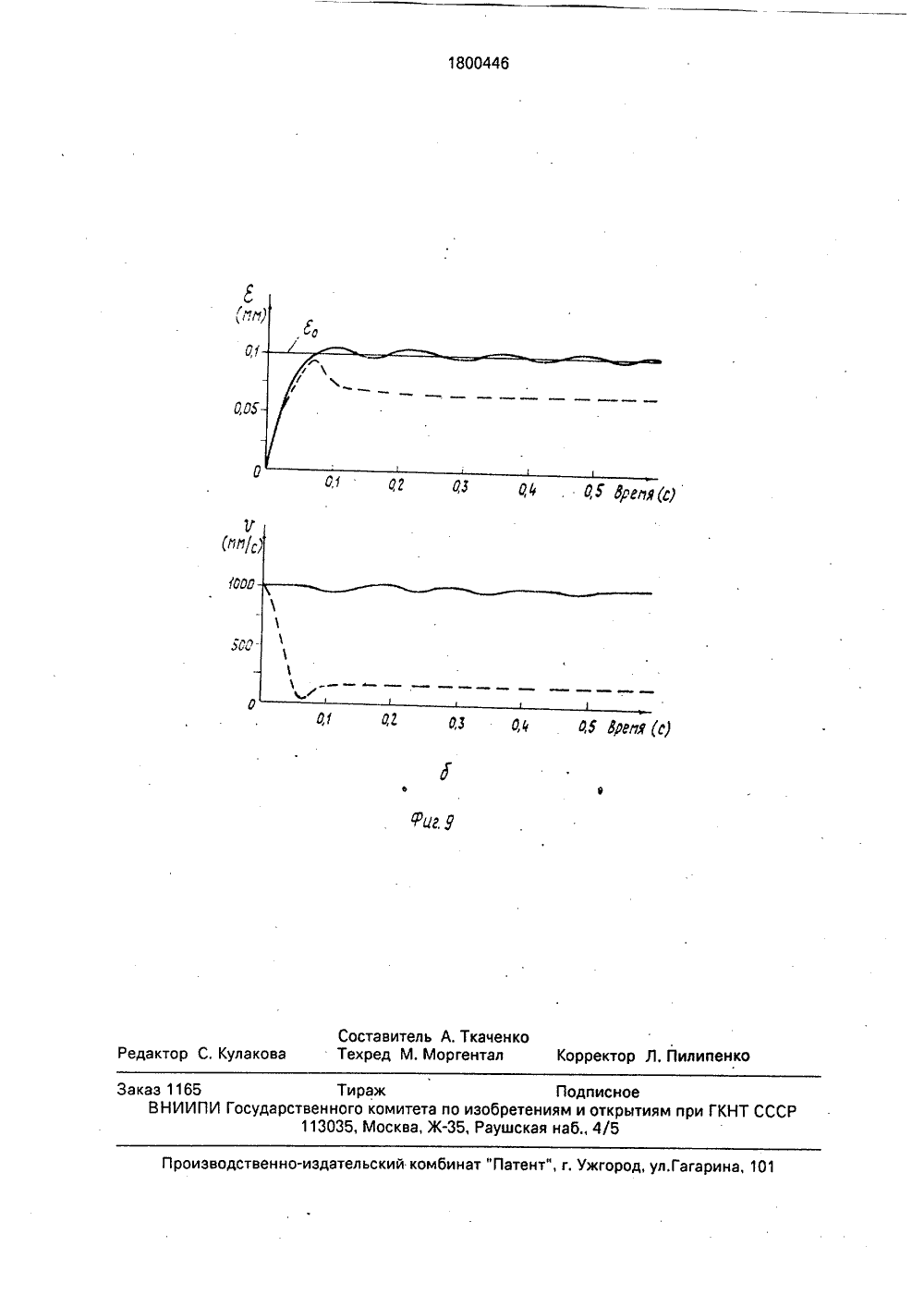
,Г 2 р , фас м, В.М,Глушкоим. Е.О.Патона лысин ской точности систем с проработ по воп- .7, Изд-во АН СССР982.ПРОГРАМ ЕМ ма программного упобласти автоматики и ки. Цель изобретения еля добротности сисания дополнительности ф ду нимнкцио- обесие от ых рех сисжащих следя- тирую- венно в отлич дах втор следя щи в, содершибках е коррек посредст ведения 1819 и , (1)ботГОСУДАРСТВЕННОЕ ПАТЕНТНОЕВЕДОМСТВО СССР(ГОСПАТЕНТ СССР) ПИСАНИЕ ИЗОБ ВТОРСКОМУ СВИДЕТЕЛЬСТ(46) 07.03.93. Бюл. М 9 (71) Институт кибернетики и ва и Институт электросварки (72) Л.С.Житецкий и Г.А,Цыб (56) Леппик К.В, О динамиче двухкоординатных следящих граммным управлением. Сб росам электромеханики, вы СССР, М.-Л., 1962, с. 50-59.Авторское свидетельство 1 ч. 987578, кл. 0 05 В 19/18,(54) КОНТУРНАЯ СИ НОГО УПРАВЛЕНИЯ (57) Контурная систе равления относится к вычислительнойтехни - повышение показат темы за счет формиров Изобретение относится к области автоматики и вычислительной техники и может быть использовано, в частности, в чертежных автоматах, газорезательных станках, сварочных машинах и другом автоматизированном оборудовании с программным управлением,Цель предлагаемого изобретения - повышение показателя добротности системы. При этом повышение показателя добротности обеспечивается введением простейших функциональных узлов цифровой вычислительной техники,го корректирующего сигнала, который непосредственно зависит от ошибки воспроизведения контура. Устройство содержит две следящие системы, каждая из которых включает связанные между собой два реверсивных счетчика импульсов, два коммутатора и элементов ИЛИ, а . также цифроаналоговый преобразователь, привод и датчик положения и общие для обеих следящих систем интерполятор, управляемый генератор импульсов, блок сравнения и блок задания максимально допустимой ошибки. Новым в системе являются связанные определенным образом два двоичных умножителя, блок вычисления ошибки воспроизведения контура и пересчетная схема, а также в каждой из двух следящих систем два дополнительных реверсивных счетчика импульсов, триггер знака направления заданного движения, два коммутатора и четыре элемента ИЛИ. 9 ил,Введение новой совокупнальных блоков и связей мепечивает формированиеизвестного решения на выховерсивных счетчиков обеихтем управляющих сигналакроме сигналов о текущих ощих систем дополнительныщие сигналы, которые независят от ошибки воспроизра, согласно зависимостямо - 10= А(т)-К Х Л Тжено точкой Р 2 с текущими координатами х 2(с), у 2(т), При этом сами текущие ошибки д(1) и ду(1) могут быть положительными, отрицательными и равными нулю, причем если ошибка является положительной, то эта ошибка получается в реверсивном счетчике 1 (фиг.1) в прямом двоичном коде, а если ошибка является отрицательной, то она в реверсивном счетчике 1 получается в дополнительном коде. В первом случае единичный выход старшего И-го разряда реверсивного счетчика 1 находится в положении "0", а во втором случае единичный выход старшего разряда реверсивного счетчика 1 находится в положении "1".Каждый раз при перемещении точки Р 1 (фиг.8) по контуру на расстояние, равное 2 , периодически с периодом времени Т содержимое реверсивного счетчика 1 (фиг,1) следящей системы по координате х передается через блок 10 вентилей в регистр 42 (фиг.З) двоичного умножителя 28 (фиг,1), При этом содержимое реверсивного счетчика 1 передается в прямом коде, если в момент передачи единичный выход триггера старшего разряда реверсивного счетчика 1 находится в положении "0", и в обратном коде, если единичный выход триггера старшего разряда реверсивного счетчика 1 находится в положении "1", Аналогичным образом осуществляется передача содержимого реверсивного счетчика 1 следящей системы по координате у через другой блок 10 вентилей в регистр 42 (фиг,З) двоичного умножителя 28 (фиг.1). Передача осуществляется следующим образом. Импульсы с выхода 20 управляемого генератора 18 с периодом Т поступают на вход 38(фиг.2), образующий управляющий вход блока 10 вентилей (фиг,1), При этом, если в момент поступления импульсов на вход 38 (фиг,2) единичный выход триггера старшего разряда реверсивного счетчика 1 (фиг,1) находится в положении "0", то эти импульсы поступают через элементы 30 и 32 (фиг.2) на нулевой вход триггера разряда регистра 42 (фиг.З), когда нулевой выход соответствующего триггера разряда реверсивного счетчика 1 (фиг.1) находится в состоянии "1", а когда этот же триггер разряда реверсивного счетчика 1 находится в состоянии "0", то указанные импульсы поступают через элементы 33 и 35 (фиг.5) на единичный вход триггера разряда регистра 42 (фиг,З), Если же в момент поступления импульсов на вход 38 (фиг.2) единичный выход старшего разряда реверсивного счетчика 1 (фиг,1) находится в положении "1", то эти импульсы поступают через элементы 31 и 32 (фиг,2) нанулевой вход триггера разряда регистра 42 (фиг,З), когда нулевой выход соответствующего триггера разряда реверсивного счетчика 1 (фиг,1) находится в состоянии "0", а 5 когда этот жетриггер разряда реверсивногосчетчика 1 находится в состоянии "1", то укаэанные импульсы поступают через элементы 34 и 35 (фиг.2) на единичный вход триггера разряда регистра 42 (фиг.З), В ре зультате в регистр 42 двоичного умножителя27 (фиг.1) периодически с периодом Т заносится в прямом параллельном коде абсолютное значение ошибки А (с точностью до единицы) в дискретные моменты време ни 1 = пТ, а в регистр 42 (фиг.З) двоичногоумножителя 28 (фиг.1) заносится в прямом параллельном коде абсолютное значение ошибки 1 ду . Например, если М = 7, а дхпТ = 9 и дупТ = -12, то прямой код в 20 реверсивном счетчике 1 следящей системыпо координате х будет иметь вид 0001001, а в реверсивном счетчике 1 следящей системы по координате у - 1110100, При этом в регистре 42 (фиг.З) двоичного умножителя 25 27 (фиг.1) будет передан код 001001, являющимся прямым двоичным кодом числа 9а в регистре 42 (фиг.З) двоичного умножителя 28 (фиг.1) будет передан код 001011, являющийся прямым двоичным кодом числа 30 1-111, т.е. кодом числа 1 ду 1 с точностью доединицы,35 40 45 50 55 Одновременно каждый раз при передаче содержимого реверсивных счетчиков 1 в двоичные умножители 27, 28 импульсы с выхода 19 управляемого генератора 18 поступают на входы 47 (фиг,З) начальной установки делителей частоты 41 обоих двоичных умножителей 27, 28 (фиг.1). В процессе перемещения точки Р 1 (фиг.8) по контуру на вход 45(фиг.З) делителя частоты 41 двоичного умножителя 27 (фиг.1) через элемент 45 ИЛИ (фиг.З) в течение периода времени Т поступает число импульсов, равное по абсолютной величине перемещению точки Р (фиг.8) по координате у на расстояние 1 Л упТ 1, а на вход 46 (фиг.З) двоичного умножителя 28(фиг,1) через элемент 45 ИЛИ (фиг,З) поступает число импульсов, равное по абсолютной величине перемещению точки (фиг.8) по координате х на расстояние 1 ЛхпТ 1. В результате по принципу работы двоичного умножителя на выходе элемента 44 ИЛИ (фиг,З) двоичного умножителя 27 (фиг.1) к концу каждого периода времени Т поступает за этот период число импульсов, равное произведению 1 Л упТ 1 на число 1 дхпТ 1/21, а на выходе элемента 44 (фиг,З) двоичного умножителя 28 (фиг.1) к концу каждого периода времени Т поступает за этот период число импульсов, равное произведению 1 ЛхпТ 1 на число 1 дупТ 1/ /2 д1.Поскольку в течение каждого периода времени Т точка Р 1 переместится по контуру на оно и то же расстояние 2 ", то 1 ЬупТ 1/2= 1 зи рпТ 1, а 1 Лхпт)1 /= =1 соз фпТ 1(фиг.8). Поэтому в течение каждого интервала времени Т на выход двоичного умножителя 27 поступит число импульсов, равное 1 дхпТ 11 соз р пТ)1, а на выходе двоичного умножителя 28 в течение этого же интервала времени поступит число импульсов, равное 1 дДпТ1 зи рпТ 1. Импульсы с выхода двоичного умножителя 27 поступают на третьи входы элементов 52-55 И (фиг.4) блока 26 вычисления ошибки воспроизведения (фиг.1), а импульсы с выхода двоичного умножителя 28 поступают на третьи входы элементов 56 - 59 И (фиг.4) этого же блока 26 (фиг,1).Каждый раз в начале очередного интервала времени Т импульс выхода 19 управляемого генератора 18, который поступает на вход 38 (фиг.2) обоих блоков вентилей 10 (фиг.1), передается на один из выходов элементов 36 или 37 И (фиг.2) в зависимости от состояния триггера старшего М-го разряда реверсивного счетчика 1 (фиг.1) в этот же момент времени с = пТ. В частности, если триггер старшего разряда реверсивного счетчика 1 находится в состоянии О, то указанный импульс поступает на выход элемента 36 И, а если этот триггер находится в состоянии 1, то указанный импульс поступает на выход элемента 37 И. В результате триггер 48 (фиг.4) блока 26 вычисления ошибки воспроизведения (фиг.1) устанавливается в такое же состояние, в котором находился триггер старшего разряда реверсивного счетчика 1 следящей системы по координате х в момент времени 1 = пТ, а триггер 50 (фиг.4) блока 26 (фиг,1) устанавливается в состояние, в котором находился триггер старшего разряда реверсивного счетчика 1 следящей системы по координате у в тот же момент времени 1 = пТ. Таким образом, в течение всего интервала времени Т триггеры 48 и 50 (фиг.4) определяют знаки ошибок 39 п АпТ и з 9 п дупТ соответственно, Аналогичным образом импульс с выхода 19 (фиг,1) управляемого генератора 18 поступает на один из элементов 36 или 37 И (фиг.2) каждого блока 9 вентилей (фиг.1) в зависимости от состояния триггеров 8, знака направления заданного движения, , подключенных к этим вентилям. В результате триггер 49 (фиг.4) устанавливается в состояние, в котором находился триггер 8 5 10 15 20 25 30 35 40 45 50 55 знака направления заданного движения (фиг.1) вдоль координаты у в момент времени с = пТ, а триггер 51 устанавливается в состояние, в котором находился триггер 8 знака направления заданного движения (фиг,1) вдоль координаты х в тот же момент времени 1 = пТ. Поскольку же з 9 пб х 1 о 1 =39 п(соз ф), э з 9 п = з 19 п(зи О), тобу 1д 1триггеры 49 и 51 (фиг.4) определяют знаки соответственно соз у пТ и зп у пТ.Если триггеры 48 и 49 находятся в одинаковом состоянии, то в течение интервала времени Т импульсы с выхода двоичного умножителя 27 (фиг,1) через третьи входы элементов 52, 53 И (фиг,4) поступают на выход элемента 60 ИЛИ. Если же триггеры 48 и 49 находятся в разных состояниях, то в течение интервала времени Т импульсы с выхода двоичного умножителя 27 (фиг.1) через третьи входы элементов 54, 55 И (фиг.4) поступают на выход элемента 61 ИЛИ, Поэтому если дхпТсозе пТО, то импульсы с двоичного умножителя 27 (фиг.1) поступают на выход 60 (фиг,4), а если дпТ)соз фпТО, то импульсы с двоичного умножителя 27 (фиг.1) поступают на выход 61 (фиг,4). В том случае, когда знаки триггеров 50 и 51 одинаковы, импульсы с выхода двоичного умно- жителя 28 (фиг.1) поступают через третьи входы элементов 56, 57 И (фиг.4) на выход элемента 61 ИЛИ, а в том случае, когда знаки триггеров 50 и 51 различны, импульсы с выхода двоичного умножителя 28 (фиг.1) поступают через третьи входы элементов 58, 59 И (фиг,4) на выход элемента 60 ИЛИ. Поэтому если дупТзи р пТО, то импульсы с двоичного умножителя 28 (фиг,1) поступают на выход 61 (фиг.4), а если дупТзи рпТО, то импульсы с двоичного умножителя 28 (фиг.1) поступают на выход (фиг.4). Таким образом, число импульсов, которое поступает на выход блока 26 вычисления ошибки воспроизведения (фиг.1) в течение интервала времени Т, равно числу АпТсозрпТ - дупТзи упТ, Согласно формуле (5) это число определяет в унитарном коде ошибку воспроизведения (фиг,8),Импульсы с выхода 60 (фиг,4) блока 26 вычисления ошибки воспроизведения (фиг,1) поступают на суммирующие входы реверсивных счетчиков 62 и 63 (фиг,5) блока 21 сравнения (фиг.1), а с выхода 61 (фиг.4) блока 26 вычисления ошибки воспроизведения (фиг.1) поступают на вычитающие входы этих же реверсивных счетчиков 62 и 63 (фиг.5) блока 21 сравнения (фиг,1).Каждый раз при поступлении импульса времени Т неизбежно наступает момент,с выхода 19 управляемого генератора 18 из когда на выходе переполнения хотя бы одблока 25 задания максимально допустимой ного из двух этих реверсивных счетчиковошибки в реверсивный счетчик 62 (фиг,5) возникает импульс, При этом импульс воззаносится прямой двоичный код е, а в ре никает тогда, когда общее число импульсовверсивный счетчик 63 (фиг.5) заносится из станет по абсолютной величине равнымэтого же блока 25 (фиг.) обратный код е. е+1, т,е. на единицу превысит максимальНапример, если я = 5, то при числе разря- но допустимую ошибку я, причем если обдав реверсивных счетчиков 62 и 63 (фиг,5), щее число импульсов являетсяравном М 1 = 4, что соответствует формуле 10 положительной величиной, то вначале им(6), счетчик 62 вкаждыйдис- пульс переполнения возникает на выходе6, в реверсивныи счетчиккретный момент времени заносится код реверсивного счетчика 63, а если общее чис 0101, а в реверсивный счетчик 63 - код 1010, ло импульсов является отрицательной вели 0 е о импульс с выхода 19 чиной, то импульс переполнения возникаетОдновременно импуль(ф .1)фиг.1) управляемого генераторао огенератора 18 стемже 15 вначале на выходе реверсивного счетчикапериодом устанавливТ с анавливает реверсивный 62. Например, если ео= 5, а общее числосчетчик 64 (фиг.5) и триггер 65 в состояние импульсов равно (-10), то импульс возникает"О". Если общее число импульсов (с учетом на выходе переполнения реверсивногознака), поступивших за период), х за период Т на сумми- счетчика 63, когда общее число импульсоврующие и вычитающие вх ьающие входы каждого из 20 достигнет числа (+6), поскольку в реверсивсчетчиков 62 и 63 по аб- ном счетчике было установлено число 0101,солютной величине равно или меньше числа а в реверсивном счетчике 63 - число 1010.я, то в течение всего этого инт всего этого интервала Т на Если же, например, общее число импульсоввыходах переполнения о оих реверсивныхобоих реверсивных равно (-10), то при я, = 5 импульс возникаетсчетчиков импульсы не возникают.сне возникают. Напри на выходе переполнения реверсивногомер если 6,=, ао ще = 5, а общее число импульсов счетчика 61, когда общее число импульсовравно 4, то к концу интервала Т в реверсив- достигнет числа (-6),Импульс с выхода переполнения одногоном счетчике 63 устанавливается число0100, а в реверсивном счетчике - числос етчике 6 - число из РевеРсивных счетчиков 62 или 63 чеРез1011. Еслижеобщеечислоимпульсов равно 30 элемент 66 ИЛИ поступает на единичный(-4), р а а Т в реверсивном вход триггера 65 и устанавливает его в со(-4), то к концу интервала в реверсивномсчетчике 62 установится число , а в рес число 0001 а в ре- стояние "1". При этом на вторых входах элеверсивном счетчике 63 - число 0110. Таким ментов 67, 68 И возникает разрешающийб б ее число импульсов по- потенциал, В результате остальные импульступивших на суммирующие и вычитающиеющиеивычитающие 35 сы, поступающие на входы реверсивныхвходы каждого из реверсивных счетчиковерсивных счетчиков 62 счетчиков 62 и 63 с этого момента времени .и 63, по абсолютной величине не и величине не превышает и до конца интервала Т начинают поступатьчисла е, то триггер 65 в течение всего этого на выходы элементов 67 и 68 И, Посколькуобщее число импульсов (с учетом знака), поинтервала Т продолжает оставаться в состое о импульсы в этот 40 ступивших на входы каждого из реверсивянии "О", в результате чего импульсы в этотных счетчиков 62 и 63 в течение интервалаже интервал времени на выход элементов67 и 68 И не поступают. Поскольку же о щеет Поскольку же общее времени Т равно ошибке воспроизведенияпТ, то прия пТе это число импульющие и вычитающие входы каждого из ре- сов (с учетом знака), будет равно (е пТ версивных счетчиков и в течение62 63 в течение 45 - ео)э 9 п е пТ (с точностью до одного иминтервала времени (с учетом знакаТ (с учетом знака) равно пульса). В частности, для приведенного при=+1ошибке воспроизведения е пТ, то при вы- мера при е = 5 в случае, когда епТ=+ О,е пТ,е импульсы общеечислоимпульсов, поступивших на вына входы реверсивного счетчика 64 не по- ходы элементов 67 и 68 И будет равно (+ )вн +4,П э огоусловиясо а когда епТ=-10, то на этих же выходахступают. При выполнении этого условия содержимое реверсивного счетчикао счетчика 64 в общее число импУльсов бУдет Равно (-5).Следовательно, общее число импульсов (стечение периода Т не изменяется.В том случае, когда о щее число имобщее число им- учетом знака), поступившее в течение интервала времени Т на выходы элементов 67и 68 И, определяет величину ЬпТ в соотпериод Т на суммирующие и вычитающиевходы каждого из ревереверсивных счетчиков 62 ветствии с зависимостью (2),б ютной величине боль- Импульсы с выхода элемента 67 Ии 63 (фиг.5), по абсолютной величине ольше заданного значения максимальначения максимально допу- (фиг,5) поступают на суммирующий вход рестимой ошибки, то в течение инте вб, в течение интервала версивного счетчика 64 и на выход 23 (фиг,1)блока 21 сравнения, а импульсы с выхода элемента 68 И (фиг,5) поступают на вычитающий вход реверсивного счетчика 64 и на выход 24 (фиг.1) блока 21 сравнения. Таким образом, к концу каждого интервала времени Т на выходы 23 и 24 (фиг.1) блока 21 сравнения передается величина ЛпТ в унитарном коде, а на выход 22 эта же величина ЬпТ передается в параллельном двоичном коде. При этом если е пТ+ е, т.е. если в момент времени т = пТ исполнительный механизм контурной системы программного управления находится по направлению движения слева за пределами трубки динамической точности шириной 2 яс как показано на фиг.8, то в соответствии с формулой (2) заведомо ЬпТО. Далее же е пТ- е, т.е. если в момент времени 1 =пТ исполнительный механизм находится по направлению движения справа за пределами трубки динамической точности, то заведомо ЬпТО.Поскольку общее число импульсов, поступивших на выходы элементов 67, 68 И (фиг.5) за интервал времени Т равно с точностью до одного импульса величине Ь(с учетом знака), то к концу каждого интервала времени Т в реверсивном счетчике 64 получается с точностью до единицы младшего разряда величина Л в прямом коде, если ЬпТО, или в дополнительном коде, если ЬпТ 0. Например, если ео=5, а я пТ =+10, то при М = 7 к концу интервала времени Т в реверсивном счетчике 64 установится двоичное число 0000100, что соответствует прямому двоичному коду величины Ь пТ = +4, Если же е пТ = -10, то при е = 5 к концу интервала времени Т в реверсивном счетчике 64 установится двоичное число 1111011, что соответствует дополнительному коду величины ЛпТ = -5,В конце каждого интервала времени Т импульсом с выхода делителя 80 частоты (фиг,7) управляемого генератора 18 (фиг.1) содержимое реверсивного счетчика 64 (фиг.5) через блок 81 вентилей (фиг.7) передается в регистр 42 (фиг.З) двоичного умно- жителя 79 (фиг.7), При этом если триггер И-го (старшего) разряда реверсивного счетчика 64 (фиг.5) находится в состоянии "0", т.е, если ЬпТ 0, а триггер какого-либо из остальных йразрядов реверсивного счетчика 64 находится в момент времени с = пТ в состоянии "1", то импульс, поступающий с выхода делителя 80 частоты (фиг.7) на вход 38 (фиг,2) блока вентилей 81 (фиг.7) через элемент 31 И (фиг.2) и элемент 32 ИЛИ поступает на нулевой вход триггера соответствующего разряда регистра 42 (фиг.З)10 152025304045 50 55 двоичного умножителя 79 (фиг.7). В том же случае, когда триггер М-го разряда реверсивного счетчика 64 (фиг.5) находится в состоянии "1", т.е. когда ЛпТО, а триггер какого-либо из остальных Мразрядов реверсивного счетчика 64 находится в момент времени 1 = пТ в состоянии "1", то импульс, поступающий с выхода делителя 80 частоты(фиг.7) на вход 38 (фиг.2) через элемент ЗЗИ и элемент 35 ИЛИ поступает на единичный вход триггера соответствующего разряда регистра 42 (фиг.З) двоичного умножителя79 (фиг.7). Если же в данный момент времени триггер какого-либо на указанных Мразрядов реверсивного счетчика 64 (фиг.5) находится в состоянии "0", то импульс, поступающий на вход 38 (фиг,2) через элемент 30 И и элемент 32 ИЛИ поступает на нулевой вход триггера соответствующего разряда регистра 42 (фиг,З) двоичного умножителя79 (фиг.7). Таким образом, если ЛпТО, то вмомент времени т = пТ каждый триггер разряда регистра 42 (фиг.З) двоичного умножителя 79 (фиг,7) установится в такое же состояние, как и соответствующий триггер разряда реверсивного счетчика 64 (фиг,5), а если ЬпТ О, то каждый триггер разряда регистра 42 (фиг.5) двоичного умножителя79(фиг,7) установится в состояние, противоположное состоянию соответствующеготриггера разряда реверсивного счетчика 64 (фиг.5), Это приводит к тому, что если Л пТО, то содержимое реверсивного счетчика 64 передается в регистр 42 (фиг.З)двоичного умножителя 79 (фиг,7) в прямом коде, а если ЛпТО, то содержимое реверсивного счетчика 64 (фиг,5) передается в регистр 42 (фиг,З) в обратном коде. Поскольку же величина ЬпТ получается в реверсивном счетчике 64 (фиг,5) в дополнительном коде, если ЛпТО, и в прямом коде, если ЛпТО, то после передачи содержимого реверсивного счетчика 64 в регистр 42 (фиг.З), в послецнем всегда установится число, равное 2 - 1 ЛпТ(с точностью до единицы младшего разряда). При этом частота 1 следования импульсов в течение интервала времени т - пТ на выходе элемента 44 ИЛИ (фиг,З) двоичного умножителя 79 (фиг.7), поступающих на выход 20 двоичного умножителя 79 (фиг,7). Если же в данный момент времени триггер какого-либо из указанных йразрядов реверсивного счетчика 64 (фиг,5) находится в состоянии О, 5 то импульс, поступающий на вход 38 (фиг,2)через элемент 34 И и элемент 35 ИЛИ поступает на единичный вход триггера соответствующего разряда регистра 42 (фиг,З)(фиг,1) управляемого генератора 18, будет равна (2 -Л пТ )Е/2, что соответствует зависимости (3). Из рассмотрения зависимости (3) видно, что если Л пТ = О, т.е. если положение исполнительного механизма контурной системы программногоуправления не выходит за пределы трубки динамической точности (фиг.8), то частота 1 следования импульсов, поступающих на выход 20 (фиг.1), максимальна и равна величине Е. Если же ЬпТО, т.е, положение исполнительного механизма выходит на пределы трубки динамической точности, то независимо от знака величины ЛпТ частота 1, как следует из формулы (3), будет тем меньше, чем больше величина ЛпТ . Таким образом, частота следования импульсов, поступающих с выхода 20 на вход интерполятора 17, будет изменяться в дискретные моменты времени т = пТ в зависимости от величины ЛпТ . При этом если ЬпТ =О, т.е, если исполнительный механизм находится в пределах трубки динамической точности, равной 2 ео (фиг,8), движение по контуру осуществляется с максимальной скоростью, а если ЛпТФ О, т,е. если исполнительный механизм находится за пределами трубки динамической точности, то независимо от знака отклонения исполнительного механизма относительно контура скорость движения уменьшается по мере увеличенияЬпТ. Тем самым обеспечивается автоматическое управление скоростью движения по контуру в зависимости от величины отклонения е,Импульсы с выхода 23 блока 21 сравнения (фиг,1), соответствующие положительным единичным приращениям величины Ь пТ, представленной в унитарном коде, через пересчетную схему 29 поступают на один из двух входов элементов 13 и 16 ИЛИ обеих следящих систем, а импульсы с выхода 24 блока 21 сравнения, соответствующие отрицательным единичным приращениям величины ЬпТ, через эту же пересчетную схему 29 поступают на один из двух входов элементов 14 и 15 ИЛИ обеих следящих систем, При этом общее число импульсов (с учетом знака), поступивших на выходы пересчетной схемы 29 в течение данного и-го интервала времени т = пТ, будет равно К ЛпТ, где К1 - коэффициент пересчета, устанавливаемый в пересчетной схеме 29. Поэтому общее число импульсов (с учетом знака), поступивших на выходы пересчетной схемы 29 в течение всего времени работы контурной системы программного управления, к и-му интервалу времени будет определяться соотношением (13). Импульсы с выхода пересчетной схемы29, соответствующие положительным единичным приращениям величины ЛпТ через элемент 13 ИЛИ каждой следящей 5 системы поступают на входы сложения соответствующих реверсивных счетчиков 3 и через элемент 16 ИЛИ - на входы вычитания соответствующих реверсивных счетчиков 4, Импульсы с выхода пересчетнойсхемы 29, 10 соответствующие отрицательным единичным приращениям величины ЬпТ через элемент 14 ИЛИ каждой следящей системы поступают на входы вычитания соответствующих реверсивных счетчиков 3 и через эле менты 15 ИЛИ - на входы сложениясоответствующих реверсивных счетчиков 4.На эти же входы реверсивных счетчиков 3 и 4 следящей системы по координате х через элементы 13-16 ИЛИ поступают также им пульсы, соответствующие единичным положительным и отрицательным приращениям текущей ошибки д,(т) данной следящей системы, а на эти же входы реверсивных счетчиков 3 и 4 следящей системы по 25 координате у через элементы 13 - 16 ИЛИпоступают импульсы, соответствующие единичным положительным и отрицательным приращениям текущей ошибки ду(т) следящей системы по координате у. При этом 30 импульсы, соответствующие положительным единичным приращениям текущих ошибок дх и ду поступают с выхода элемента 11 ИЛИ через элемент 13 ИЛИ на вход сложения реверсивного счетчика 3 и через 35 элемент 15 ИЛИ на вход сложения реверсивного счетчика 4. Импульсы, соответству-ющие отрицательным единичным приращениям ошибок дх и ду с выхода элемента 12 ИЛИ поступают через элемент 14 40 ИЛИ на вход вычитания реверсивного счетчика 3 и через элемент 16 ИЛИ на вход вычитания реверсивного счетчика 4, В результате в конце каждого интервала времени т = пТ в реверсивных счетчиках 3 и 4 45 получаются в параллельном двоичном кодевеличины, определяемые соотношениями (9) в (12).В каждый дискретный момент временит = пТ импульсом с выхода 19 управляемого 50 генератора 18 в зависимости от состояниятриггера 8 знака направления заданного движения по координате у содержимое реверсивного счетчика 3 или реверсивного счетчика следящей системы по координате 55 х в прямом параллельном коде через соответствующий вход передачи параллельного кода блока 9 вентилей этой же следящей системы передается в реверсивный"счетчик 2 данной следящей системы, Аналогичным образом в тот же момент времени этим жеимпульсом в зависимости от состояния триггера 8 знака направления заданного движения по координате х содержимое реверсивного счетчика 3 или реверсивного счетчика 4 следящей системы по координате у в прямом параллельном коде через соответствующий вход передачи параллельного кода блока 9 вентилей этой же следящей системы передается в реверсивный счетчик 2 данной следящей системы. Передача содержимого одного из двух реверсивных счетчиков 3 или 4 осуществляется следующим образом. В том случае, когда триггер 8 знака направления заданного движения по координате у находится в состоянии "0", в зависимости от состояний триггеров разрядов реверсивного счетчика 4 следящей системы по координате х импульс, поступающий на управляющий вход 38 (фиг.2) блока 9 вентилей (фиг.1), через элементы 30 И (фиг.2) и элементы 32 ИЛИ подается на нулевые входы соответствующих триггеров разрядов реверсивного счетчика 2 (фиг.1) следящей системы по координате х или через элементы 33 И (фиг,2) и элементы 35 ИЛИ - на единичные входы соответствующих триггеров разрядов того же реверсивного счетчика 2 (фиг.1) этой же следящей системы. Если же триггер 8 знака направления заданного движения координаты у находится в состоянии "1", то в зависимости от состояния триггеров реверсивного счетчика 3 следящей системы по координате х импульс, поступающий на управляющий вход 38 (фиг.2) блока 9 вентилей (фиг.1) через элементы 31 И (фиг,2) и элементы 32 ИЛИ подаются на нулевые входы соответствующих триггеров разрядов реверсивного счетчика 2 (фиг.1) следящей системы по координате х или через элементы 34 И (фиг,2) и элементы 35 ИЛИ - на единичные входы соответствующих триггеров разрядов этого же реверсивного счетчика 2 (фиг,1). В том случае, когда триггер 8 знака направления заданного движения по координате х находится в состоянии "0", в зависимости от состояния триггеров разрядов реверсивного счетчика 3 следящей системы по координате у импульс, поступающий на управляющий вход 38 (фиг.2) блока 9 вентилей (фиг,1), через элементы 30 И (фиг.2) и элементы 32 ИЛИ подается на нулевые входы соответствующих триггеров разрядов реверсивного счетчика 2 (фиг.1) следящей системы по координате у или через элементы 33 И (фиг,2) и элементы 35 ИЛИ - на единичные входы соответствующих триггеров разрядов того же реверсивного счетчика 2 (фиг,1). Если же триггер 8 знака направления заданного дви темы по координате у, определяемое выражением (11) или (12) соответственно, При этом, в случае, когда зцп =+1, ву бт 35 реверсивный счетчик 2 следящей системыпо координате х передается содержимое реверсивного счетчика 4 этой же следящей системы, Если же зцпс у 1= -1, то в ребт40 версивный счетчик 2 следящей системы покоординате х передается содержимое реверсивного счетчика 3 этой же следящейб х 1системы. В том случае, когда 3 цпб 1 45 =+1, в реверсивный счетчик 2 следящейсистемы по координате у передается содержимое реверсивного счетчика 3 этойб х 1же следящей системы, Если же зцпС 1= - 1, то в реверсивный счетчик 2 следящей системы по координате у передается содержимое реверсивного счетчика 4 этой же следящей системы. Таким путем в каждый дискретный момент времени т = пТ в реверсивных счетчиках 2 обеих следящих систем устанавливаются величины д,(пТ) иоуп Т, о п редел я ем ы е соответственно выражениями: 5 10 15 20 25 30 жения по координате х находится в состоянии "1", то в зависимости от состоя ний триггеров разрядов реверсивного счетчика 4 следящей системы по координате у импульс, поступающий на управляющий вход 38 (фиг.2) блока 9 вентилей (фиг,1), через элементы 31 И (фиг.2) и элементы 32 ИЛИ подается на нулевые входы соответствующих триггеров разрядов реверсивного счетчика 2 (фиг.1) следя щей систем ы по координате у или через элементы 34 И (фиг,2) и элементы 35 ИЛИ - на единичные входы соответствующих триггеров разрядов этого же реверсивного счетчика 2 (фиг.1). В результате в каждый дискретный момент времени 1 = пТ с интервалом времени Т ву 1зависимости от знака зцп направлебтния заданного движения по координате у в реверсивный счетчик 2 следящей системы по координате х заносится содержимое реверсивного счетчика 3 или 4 следящей системы по координате х, определяемое выражением (9) или (10) соответственно, а вс х 1зависимости от знака зцп направлес тния заданного движения по координате х в реверсивный счетчик 2 следящей системы по координате у заносится содержимое реверсивного счетчика 3 или 4 следящей сисПоскольку между двумя очередными передачами содержимых реверсивных счетчиков 3 или 4 в реверсивный счетчик 2 в течение интервала времени Т продолжают поступать через элементы 11 и 12 ИЛИ на суммирующие и вычитающие входы реверсивных счетчиков 2 импульсы с выходов интерполятора 17 и датчиков 7 положения, то в течение указанного интервала времени содержимое реверсивного счетчика 2 следящей системы по координате х изменяется одновременно с каждым единичным изменением текущей ошибки А(т), а содержимое реверсивного счетчика 2 следящей системы по координате у изменяется одновременно с каждым единичным изменением величины текущей ошибки ду(т). Если же учесть, что в каждый дискретный момент времени т = пТ в реверсивных счетчика 3 или 4 устанавливаются величины охпТ) и сгупТ, определяемые выражениями (14), то в результате в интервале времени (и - 1)ТтпТ в реверсивных счетчиках 2 следящих систем образуются величины т(т) и о(с), определяемые выражениями (5). Поскольку величина ф пТ в выражениях (5) определяется согласно формуле (13), то выражения для величин сто(т) и оу(т) окончательно приобретают вид, определяемый соотношениями (1). В результате в реверсивных счетчиках 2 следящих систем формируются управляющие сигналы %(т) и о(т), содержащие кроме сигналов о текущих ошибках дх(т) и ду(т), дополнительные корректирующие сигналы, которые согласно формулам (1) и (2),непосредственно зависят от ошибки воспроизведения контура япТ,Из формул (1) видно, что управляющие сигналы Ь и а образуются путем периодического добавления к сигналам ошибок дх и ду в моменты времени т = пТ (с соответствующим знаком) сигналов, пропорциональных величине ЬпТ). Такое добавление приводит к перемещению точки Р 2 (фиг.8) в направлении к точке Р 2. Это перемещение будет продолжаться до тех пор, пока не будет выполнено условие ЛпТ = О, т.е. пока ошибка воспроизведения е (т) по модулю превышает величину максимально допустимой ошибки яо . После того, как Л пТ становится меньше или равной ео, т.е. когда, согласно(2), ЬпТ ео, добавление ЬпТ), прекратится. При этом точка Р 2 по.падает в пределы трубки динамической точности шириной 2 ео. В результате, как былсописано выше, происходит воспроизведе.5 ние контура с максимально возможной скоростью, определяемой частотой 1 (3).Для проверки работоспособности предлагаемого технического решения проводилось моделирование контурной системы10 программного управления на ЭВМ ВЭСМ,Моделировалось воспроизведение криволинейного контура, представляющего собойокружность с радиусом, равным 100 мм. Примоделировании цена одной двоичной еди 15 ницы перемещения была выбрана равной0,025 мм, а частота Р = 40000 импульсов всекунду. Результаты моделирования представлены на фиг.9 сплошными линиями. Длясравнения на этой же фигуре штриховыми20 линиями показаны результаты моделирования системы, выбранной в качестве прототипа. Сравнение показывает, что при однойи той же заданной величине максимальнодопустимой ошибки, равной ео = 0,1 мм,25 скорость Ч воспроизведения. в предложенной системе автоматически устанавливается равной 1000 мм/с, а в системе - прототипе- 120 мм/с. При этом ошибка е воспроизведения контура и в предложенной системе и30 всистеме - прототипе не превосходитзаданной величины максимально допустимойошибки ео, но показатель добротности впредлагаемом техническом решении в пятьраз выше по сравнению с таким же показа 35 телем в устройстве-прототипе,Таким образом, введение новой совокупности функциональных блоков и связеймежду ними, выгодно отличает предлагаемое техническое решение от известного ре 40 шения, поскольку оно позволяетсущественно повысить показатель добротности системы. При этом повышение показателя добротности обеспечивается путемвведения достаточно простых и однотипных45 функциональных узлов и элементов цифровой вычислительной техники - логическихэлементов, счетчиков и пересчетных схем,Это позволяет в конечном счете значительно расширить область применения контур 50 ной системы программного управления,включая, в частности, прецизионную обработку деталей криволинейной формы с достаточно большой скоростью.Формула изобретения55 Контурная система программного управления, содержащая следящую системупо каждой из двух координат, состоящую изпервого реверсивного счетчика импульсов,сигналов, пропорциональных величинепервого коммутатора, последовательно соединеннык второго реверсивного счетчикаимпульсов, цифроаналогового преобразователя, привода и датчика положения исполнительного механизма, а также интерполятор, управляемый генератор импульсов, блок сравнения, входустановки которого соединен с выходом блока задания максимально допустимой ошибки воспроизведения, а выход передачи величины ошибки воспроизведения контура соединен с входом управляемого генератора импульсов, причем суммирующие входы первого и второго реверсивных счетчиков импульсов каждой следящей системы объединены между собой и через первый элемент ИЛИ подключены к первому выходу приращений интерполятора и первому выходу датчика положения исполнительного механизма следящей системы, вычитающие входы первого и второго реверсивных счетчиков импульсов объединены между собой и через второй элемент ИЛИ подключены к второму выходу приращений интерполятора и второму выходу датчика положения исполнительного механизма следящей системы, вход передачи параллельного кода второго реверсивного счетчика импульсов каждой следящей системы соединен с первым выходом первого коммутатора той же следящей системы, первые управляющие входы первых коммутаторов обеих следящих систем объединены между собой и подключены к первому выходу управляемого генератора импульсов, второй выход которого соединен с информационным входом интерполятора, о т л и ч а ю щ а я с я тем, что, с целью повышения показателя добротности системы, в нее введены два двоичных умно- жителя, блок вычисления ошибки воспроизведения контура и пересчетная схема, а каждая следящая система содержит второй коммутатор, третий и четвертый реверсивные счетчики импульсов, третий, четвертый, пятый и шестой элементы ИЛИ и триггер знака направления заданного движения, второй и третий входы коммутатора каждой следящей системы соединены с соответствующими информационными входами блока вычисления ошибки воспроизведения контура, а второй и третий управляющие входы подключены к соответствующим выходам триггера знака направления заданного движения по координате другой следящей системы, первый и второй входы передачи параллельного кода первого коммутатора соединены соответственно с выходами разрядов третьего и четвертого реверсивных счетчиков импульсов своей следящей системы, суммирующие входы третьего и четвертого реверсивных счетчиков импульсов каждой следящей системы соединены соответственно с выходами третьего и четвертого элементов ИЛИ 5 своей следящей системы, вычитающие входы третьего и четвертого реверсивных счетчиков импульсов каждой следящей системы соединены соответственно с выходами пятого и шестого элементов ИЛИ своей следя щей системы, первые входы третьего ичетвертого элементов ИЛИ каждой следящей системы объединены с суммирующими входами первого и второго реверсивных счетчиков импульсов следящей системы, 15 первые входы пятого и шестого элементовИЛИ следящей системы объединены с вычитающими входами первого и второго реверсивных счетчиков импульсов следящей системы данной координаты, вторые входы 20 третьего и шестого элементов ИЛИ следящих систем объединены между собой и соединены с соответствующим выходом пересчетной схемы, первый вход которой соединен с первым выходом приращений 25 блока сравнения, вторые входы четвертогои пятого элементов ИЛИ следящих систем объединены и соединены с соответствуюВцим выходом пересчетной схемы, второйвход которой соединен с вторым выходом 30 приращений блока сравнения, подключенного вторым и третьим информационными входами к выходам блока вычисления ошибки воспроизведения контура, группа входов которого соединена с выходами соответст вующих двоичных умножителей, причемвход передачи параллельного кода каждого двоичного умножителя подключен к первому выходу второго коммутатора соответствующей следящей системы, а первый и 40 второй управляющие входы соединены соответственно с единичным и нулевым входами триггера знака направления заданного движения по координате другой следящей системы и подключены к первому и второму 45 выходам другой координаты интерполятора, второй и третий выходы вторых коммутаторов соединены с соответствующими информационными входами блока вычисления ошибки воспроизведения контура, уп равляющие входы вторых коммутаторовобъединены между собой и соединены с входами начальной установки первого и второго двоичныхумножителей и блока сравнения и с первым выходом управляемого 55 генератора импульсов, а соответствующиевходы передачи параллельного кода коммутаторов соединены с выходами разрядов первых реверсивных счетчиков импульсов,О У 1сгу (1) = ду (т) + К , Тздп1=1 где дх (т), ду (т) - текущие ошибки следящих систем по координатам х и у, соответственно,х 1 = хф), у 1 = у 1(т) - заданные значения положения исполнительного механизма контурной системы в каждый текущий момент времени по координате х и у соответственно;К - коэффициент пропорциональности; Л - величина, связанная с ошибкой воспроизведения контура зависимостью 15где япТ - ошибка воспроизведения в дискретный момент времени т = пТ(п = 1,2,);о - максимально допустимая ошибка;Т - период квантования. 25 При этом частота 1 следования импульсов управляемого генератора, определяющая скорость воспроизведения контура, становится связанной с величиной Л(2) зависимостью 30 т = (1 - ЬпТ); 2(3) где Р - опорная частота. 35Из соотношения (1) с учетом (2) видно,что всякий раз, когда ошибка я воспроизведения начинает превышать по абсолютнойвеличине величину максимально допустимой ошибки го, происходит изменение корректирующих сигналов, Эти изменениябудут продолжаться до тех пор, пока ошибкая воспроизведения не станет равной илименьшей ео, т.е. пока величина Лнестанет равной нулю, Но при Лчастота 1, 45согласно (3), стремится к максимальномузначению, равному Р. В результате обеспечивается высокий показатель добротности,определяемый отношением скорости воспроизведения контура к ошибке воспроизведения, 50Возможность повышения показателядобротности за счет введения дополнительныхх корректирующих сигналов, согласно (1),подтверждена путем моделирования контурной системы на ЭВМ ВЭСМ - 6,На фиг. 1 изображена структурная схема контурной системы программного управления; на фиг, 2 - пример выполненияструктурной схемы блоков вентилей; на фиг, 3 - структурная схема двоичных умножителей; на фиг.4 - пример выполнения структурной схемы блока вычисления ошибки воспроизведения; на фиг,5 - пример выполнения структурной схемы блока сравнения; на фиг.6 - пример выполнения схемы блока задания максимально допустимой ошибки; на фиг.7 - пример выполнения структурной схемы управляемого генератора; на фиг.8 - показаны заданное и фактическое положения исполнительного механизма контурной системы программного управления относительно контура в процессе его воспроизведения; на фиг.9 представлены графики изменения во времени ошибки воспроизведения контура (а) и скорости воспроизведения контура (б) в предлагаемом устройстве и в устройстве -прототипе,Контурная система программного управления (фиг,1) содержит две следящие системы, каждая из которых включает в себя четыре реверсивных счетчика 1-4, цифроаналоговый преобразователь 5, привод 6, датчик 7 положения исполнительного механизма, триггер 8 знака направления заданного движения, два коммутатора 9. 10 и шесть элементов 11 - 16, а также общие для контурной системы интерполятор 17, управляемый генератор импульсов 18, снабженный выходами 19 и 20, блок 21 сравнения, имеющий выходы 22, 23 и 24, блок 25 задания максимально допустимой ошибки, блок 26 вычисления ошибки воспроизведения контура; два двоичных умножителя 27, 28 и пересчетную схему 29.Реверсивные счетчики 1 предназначены для определения текущих ошибок дх и ду следящих систем по двум координатам х и у соответственно: дх = Х 1 - С 2, ду = У 1 - У 2,(4) где х 2 = х 2(т), у 2 = у 2(т) - фактические значения положения исполнительного механизма в каждый текущий момент времени 1 по координатам х и у соответственно (см.фиг,8),Суммирующий вход реверсивного счетчика 1 данной следящей системы объединен с суммирующим входом реверсивного счетчика 2 этой же следящей системы и подключен к выходу элемента 11 ИЛИ указанной следящей системы, Вычитающий вход реверсивного счетчика 1 данной следящей системы объединен с вычитающим входом реверсивного счетчика 2 этой же следящей системы и подключен к выходу элемента 12 ИЛИ указанной следящей системы.Реверсивные счетчики 2 предназначены для определения текущих значений уп 18004461800446 04 . ОК фея(с) ОЗ О,Ф Я 8 ргм с) фцг 9 Составитель А. ТкаченкоРедактор С. Кулакова Техред М. Моргентал Корректор Л. Пили водственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 10 аз 1165 Тираж ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ С113035, Москва, Ж, Раушская наб., 4/5равляющих сигналов ох и ау следящих систем по координатам х и у согласно соотношениямОх (х) = дх (1) ф пТ 819 п(ту (1) = ду (т) +пТз 9 пх"бс10гдепТ - корректирующие сигналы.Выходы реверсивных счетчиков 2 подключены ко входам цифро-аналоговых преобразователей 5. Цифра-аналоговые преобразователи предназначены для преобразования управля ющих сигналов % и Оу, представленных в цифровом виде, в аналоговую форму. Цифра-аналоговые преобразователи 5 могут быть выполнены, например, в виде преобразователей кода во временной интервал. 20Выходы цифра-аналоговых преобразователей 5 соединены со входами приводов 6. Каждый привод 6 включает усилитель мощности, двигатель и исполнительный механизм. При построении цифра-аналоговых 25 преобразователей 5 в виде преобразователей кода во временной интервал в качестве усилителя мощности, входящего в состав привода 6, может быть использован, в частности, усилитель, работающих в режиме 30 класса О (в режиме переключений).Выходы приводов 6 связаны с датчиками 7 положения. Датчики положения предназначены для преобразования перемещений вдоль каждой координаты, 35 пропорциональные текущим углам поворота двигателей, в унитарный код - последовательности импульсов, текущие числа которых определяют координаты хг(1) и уг(с) фактического положения исполнительного 40 механизма контурной системы в момент времени с. Каждый из датчиков 7 положения снабжен двумя выходами, один из которых определяет перемещение исполнительного механизма в положительном 45 направлении, а другой - в отрицательном направлении, Выход датчика 7 положения исполнительного механизма каждой следящей системы, соответствующий положительному направлению движения 50 исполнительного механизма, подключен к одному из двух входов элемента 11 ИЛИ этой же следящей системы, а выход датчика 7 положения, каждой следящей систем ы, соответствующий отр ицател ь ному 55 направлению движения исполнительного механизма, подключен к одному из двух входов элемента 12 ИЛИ этой же следящей системы. Реверсивные счетчики 2 каждой следящей системы снабжены входами передачи параллельного кода. Вход передачи параллельного кода реверсивного счетчика 2 каждой следящей системы связан с первым выходом коммутатора 9 этой же следящей системы.Коммутатор 9 предназначен для обеспечения периодической передачи с периодом времени Т содержимого одного из двух реверсивных счетчиков 3 или 4 в прямом параллельном коде в реверсивный счетчик 2 соответствующей следящей системы, а также для передачи состояния триггера 8 знака направления заданного движения в блок 26 вычисления ошибки воспроизведения. С этой целью каждый блок 9 содержит два входа передачи параллельного кода, подключенные к выходам всех М разрядов двух реверсивных счетчиков 3 и 4 и снабжен тремя управляющими входами. Первые управляющие входы обоих блоков 9 объединены между собой и подключены к выходу 19 управляемого генератора 18, Два других управляющих входа блока 9 каждой следящей системы подключены к выходам триггера 8 знака другой следящей системы, Для обеспечения связи двух выходов каждого триггера 8 с блоком 26 через блоки 9 последние снабжены дополнительными вторым и третьим выходами,Коммутатор 9 может быть выполнен, например, так, как показано на фиг,2, Блок содержит одну группу логических элементов, включающих элементы 30 и 31 И и элемент 32 ИЛИ, вторую группу элементов, включающих элементы 33 и 34 И и элемент 35 ИЛИ, а также элементы 36 и 37 И. Каждый элемент 32 ИЛИ имеет два входа, соединенные с выходом элементов 30 и 31 И, а элемент 35 ИЛИ имеет два входа, соединенные с выходами 33 и 34 элементов И, Каждый элемент 30, 31, 33,34 в двух группах логических элементов имеет три входа, а элементы 36 и 37 имеют два входа, Первые входы всех элементов 30, 31, 33, 34, 36, 37 объединены между собой и образуют управляющий вход 38 блока вентилей. Вторые входы всех элементов 30, 33, 36 объединены между собой и образуют управляющий вход 39. Вторые входы всех элементов 31, 34, 37 объединены между собой и образуют управляющий вход 40. Совокупность третьих входов всех элементов 30, 33 образуют первый вход передачи параллельного кода, а совокупность входов всех элементов 31, 34 образуют второй вход передачи параллельного кода. При этом число элементов 30, 31, 33, 34 одинаково и равно числу М разрядов реверсивных счетчиков 1 - 4 (фиг.1), включая старший К-йразряд (разряд знака), причем для координаты х третий вход каждого элемента 30 (фиг.2) подключен к нулевому выходу триггера соответствующего разряда реверсивного счетчика 4 (фиг.1), а третий вход каждого элемента 33 (фиг,2) - к единичному выходу триггера соответствующего разряда этого же счетчика 4(фиг,1), аналогично третий вход каждого элемента 31 (фиг,2) подключен к нулевому выходу триггера соответствующего триггера соответствующего разряда реверсивного счетчика 3 (фиг.1), а третий вход каждого элемента 34 (фиг,2) - к единичному выходу триггера соответствующего разряда этого же счетчика 3 (фиг,1). Для координаты у третий вход каждого элемента 30 (фиг.2) подключен к нулевому выходу триггера соответствующего разряда реверсивного счетчика 3 (фиг.1), а третий вход каждого элемента 33 (фиг.2) - к единичному выходу триггера соответствующего разряда этого же счетчика 3 (фиг,1), аналогично, третий вход каждого элемента 31 (фиг,2) подключен к нулевому выходу триггера соответствующего разряда реверсивного счетчика 4 (фиг,1), а третий вход каждого элемента 34 (фиг,2) - к единичному выходу триггера соответствующего разряда этого же счетчика 4 (фиг,1). Управляющий вход 38 (фиг,2) блока 9 вентилей (фиг,1) подключен к выходу 19 управляемого генератора 18, Управляющий вход 39 (фиг,2) подключен к нулевому выходу триггера 8 знака (фиг,1), а управляющий вход 40 (фиг,2) подключен к единичному выходу этого же триггера 8 (фиг.1), Совокупность выходов всех элементов 32, 35 (фиг.2) образует первый выход коммутатора 9 (фиг.1), причем выходы элементов 32 (фиг,2) служат для подключения к нулевым входам триггеров соответствующих разрядов реверсивного счетчика 2 (фиг.1), а выходы элементов 35 (фиг,2) служат для подключения к единичным входам этих же триггеров разрядов. Выходы элементов 36 и 37 образуют соответственно вторые и третьи выходы блока 9 вентилей (фиг,1), соединенные со входами блока 26 вычисления ошибки воспроизведения,Триггеры 8 знака направления заданного движения, выходы которых связаны с коммутатором 9, предназначены для определения текущего знака направления здпбх 1, бУи з 9 п б движения вдольб 1 б 1соответствующей координаты х и у. С этой целью нулевой вход одного триггера 8 подключен к выходу интерполятора 17 координаты х, соответствующему положительному направлению движения по этой координате, а единичный вход этого же триггера подключен к выходу интерполятора 17 этой же.координаты, соответствующему отрицател ь 5 ному направлению. Аналогичным образомнулевой и единичный входы другого триггера 8 подключены к выходам интерполятора 17 координаты у соответствующимположительному и отрицательному направ 10 лениям движения вдоль этой координаты.Двоичный умножитель 27 предназначендля определения произведения абсолютного значения ошибки дхпТпо координатех, определяемой периодически в дискрет 15 ные моменты времени т = пТ, и абсолютногозначения ф зп пТ, где угол р пТ естьугол между направлением касательной кконтуру в т. Р 1 и направлением оси ох вмомент времени т = пТ (см.фиг,8),20 Двоичный умножитель 28 предназначендля определения произведения абсолютного значения ошибки дупТпо координатеу, определяемой в те же дискретные моменты времени т = пТ. и абсолютного значения25 величины соз р пТ. Двоичный умножитель27 снабжен входом передачи параллельногокода, предназначенным для ввода абсолютной величины дхпТ, а двоичный умножитель 28 - аналогичным входом,30 предназначенным для ввода абсолютнойвеличины дЯпТ . Двоичный умножитель27 снабжен двумя другими входами, которые предназначены для ввода абсолютнойвеличины ЛупТ, представленной в уни 35 тарном коде и представляющей собой приращение по координате у, отнесенное кмоменту времени (см.фиг,8). Двоичный умножитель 28 также снабжен двумя другимивходами, которые предназначены для ввода40 абсолютной величины ЛхпТ, представленной в унитарном коде и представляющейсобой приращение по координате х, отнесенное к тому же моменту времени 1 = пТ,Каждый двоичный умножитель 27 и 28 снаб 45 жен также входом начальной установки. Входы передачи параллельного кодадвоичных умножителей 27 и 28 соединены с выходами соответствующего коммутатора 50 10. Два других входа двоичного умножителя27 подключены к двум выходам по координате у интерполятора 17, а два других входа двоичного умножителя 28 - к двум выходам по координате х интерполятора 17. Входы 55 начальной установки обоих двоичных умножителей 27 и 28 объединены с управляющими входами блоков 10 вентилей и связаны с выходом 19 управляемого генератора 18, а выходы этих же двоичных умножителей со10 1 (фиг.1), отводимых под абсолютное значение ошибки д (имеется в виду ошибка дх или 15 ду без учета старшего знакового разряда), Делитель 41 частоты (фиг,З) имеет вход 46, подключенный к выходу элемента 45 ИЛИ, и вход 47 начальной установки. Выходы делителя 41 связаны с одними входами группы 20 элементов 43 И, другие входы которых соединены с единичными выходами триггеров разрядов регистра 42, Выходы всех элементов 43 И соединены со входами элемента 44 ИЛИ, Выходэлемента 44 ИЛИобразуетвыход 25 30 35 40 45 50 55 единены со входами блока 26 вычисленияошибки воспроизведения.Оба двоичных умножителя 27 и 28 могут быть выполнены однотипными в соответствии со схемой, представленной на фиг.З. Двоичный умножитель содержит делитель 41 частоты, регистр 42, группу элементов 43 И, элемент 44 ИЛИ и элемент 45 ИЛИ. Регистр 42 предназначен для запоминания в прямом параллельном коде абсолютной величины ошибки д пТ 1. Регистр выполнен на триггерах и содержит Кразрядов, равных числу разрядов в реверсивном счетчике двоичного умножителя, вход 47 начальной установки делителя 41 частоты образует вход начальной установки двоичного умножителя, единичные и нулевые входы триггеров разрядов регистра 42 образуют вход передачи параллельного кода, а два входа элемента 45 ИЛИ образуют два входа двоичного умножителя, которые предназначены для подключения к соответствующим двум выходам интерполятора 17 (фиг.1).Коммутатор 10, одни выходы которых связаны со входами передачи параллельного кода двоичных умножителей 27 и 28, своими входами подключены к выходам разрядов реверсивных счетчиков 1 Коммутатор 10 предназначен для передачи абсолютного значения ошибки 1 д пТ из реверсивных счетчиков 1 в прямом параллельном коде в соответствующие двоичные умножители в дискретные моменты времени с = пТ, а также для передачи в соответствующие дискретные моменты времени состояния триггера старшего К-го разряда реверсивного счетчика 1 определяющее знак величины ошибки здп д пТ, в блок 26 вычисления ошибки воспроизведения.Каждый коммутатор 10 в принципе может быть выполнен точно так же, как и коммутатор 9 в соответствии со схемой, изображенной на фиг.2. В этом случае первый вход передачи параллельного кода коммутатора 10, образуемый третьими входами всех элементов 30, 33 (фиг.2) служит для передачи прямого кода содержимого реверсивного счетчика 1 (фиг.1), а второй вход передачи параллельного кода коммутатора 10, образуемый третьими входами элементов 31, 34 (фиг.2), служит для передачи обратного кода содержимого того же реверсивного счетчика 1 (фиг,1). С этой целью третий вход каждого элемента 31 (фиг.2) объединяется с третьим входом одного элемента 33 и подключается к единичному выходу одного из Ктриггеров разряда реверсивного счетчика 1 (фиг.1), за исключением старшего К-го разряда (разряда знака), а третий вход каждого элемента 30 (фиг.2) объединяется с третьим входом одного элемента 34 и подключается к нулевому выходу триггера соответствующего Кразрядов реверсивного счетчика 1 (фиг,1), за исключением старшего К-го разряда (разряда знака), Нулевой же выход старшего К-го триггера разряда реверсивного счетчика 1 подключается ко входу 39 (фиг.2), а единичный выход этого же триггера подключается ко входу 40. При этом каждый из Квыходов элементов 32 подключается к нулевому входу соответствующего триггера разряда регистра 42 (фиг.З), входящего в состав двоичного умножителя, а каждый из Квыходов элементов 35 (фиг.2) подключается к единичному входу соответствующего триггера разряда регистра 42 (фиг,З). Выходы же элементов 36 и 37 (фиг,2) в данном случае образуют соответственно вторые и третьи выходы коммутатора 10 (фиг,1), соединенные со входами блока 26 вычисления ошибки воспроизведения,Блок 26 вычисления ошибки воспроизведения контура, со входами которого соединены вторые и третьи выходы блоков 9 вентилей, вторые и третьи выходы обоих коммутаторов 10 и выходы двоичных умножителей 27 и 28, предназначен для получения в унитарном коде ошибки воспроизведения е в каждый дискретный момент времени т = пТ в соответствии с выражением епТ= дДпТсов фпТ - дфпТзп рпТ, (6) Блок 26 вычисления ошибки воспроизведения контура снабжен двумя выходами, связанными с двумя входами блока 21 сравнения, и предназначенными для передачи в унитарном коде в блок сравнения величины епТ. Пример выполнения блока 26 вычисления ошибки воспроизведения показан на фиг,4. Блок вычисления ошибки воспроизведения контура содержит четыре триггера 48 - 51, которые предназначены для запоминания в каждый дискретный момент времени т= пТ знаков ошибок здп д,пТ, здп дупТ и знаков направления движения вдоль кажб у 1 мен 39 пс = пТ, а также восемь элементово52 - 59 И и два элемента 60, 61 ИЛИ, причем 5 (фиг триггеры 48 и 50 предназначены для запоминания знаков з 9 п дх пТ и 39 п дупТ соед соответственно, а триггеры 49 и 51 - для ошиб х 1 для запоминания знаков з 9 пс 1т=пТииб х 1 с за 39 п1 = пТ соответственно. НУлевой койбти единичный входы триггера 48 соединены пар соответственно с выходами элементов 36 ии 37 коммутатора 10(фиг,2), предназначенно- "5 ния го для передачи параллельного кода ошибкид а нулевой и единичный входы триггера 50 этои (фиг.4) соединены соответственно с выходами элементов 36 и 37 блока 10 вентилей сна (фиг,2), предназначенного для передачи па вых- 20 вых раллельного кода ошибки ду, Нулевой и еди- чин ничный входы триггера 49 (фиг.4) соединены 23 соответственно с выходами элементов 36 и код 37 того блока вентилей (фиг.2), входы 39 и 40 со которого связаны с выходами триггера 8 5 вых25 знака направления движения (фиг.1) вдоль вхо координаты у, а нулевой и единичный входы чен триггера 51 (фиг.4) соединены соответствен- Лп но с выходами элементов 36 и 37 того блока бло вентилей (фиг,2), входы 39 и 40 которого нач30 связаны с выходами триггера.8 знака на- ход правления движения (фиг,1) вдоль координаты х.Каждый элемент 52 - 59 И (фиг.4) снаб- Это жен тремя входами, При этом первые входы 35 чик элементов 52 и 54 объединены между собой и д и подключены к нулевому выходу триггера рев 48, а первые входы элементов 53 и 55 объе- меж динены между собой и подключены к еди- дов ничному выходу триггера 48, вторые входы сра40 элементов 52 и 55 объединены между собой вых и подключены к нулевому выходу триггера вых 49, а вторые входы элементов 53 и 54 объе- рои динены между собой и подключены к еди- вер ничному выходу триггера 49, третьи входы объ45 элементов 52, 53, 54 и 55 объединены между из собой и образуют вход блока 26 вычисления вхо ошибки воспроизведения (фиг.1), с которым под связан выход элементы 44(фиг,З), входяще- явл го в состав двоичного умножителя 27(фиг.1), ош50Аналогичным образом подключены к пер выходам триггеров 50 и 51 (фиг.4) первые и 63 вторые входы элементов 56, 57, 58 и 59. 66 Третьи же входы этих элементов объедине- ни ны между собой и образуют вход блока 26 хо55 х вычисления ошибки воспроизведения ост (фиг,1), с которым связан выход элемента 44 Вь (фиг.З), входящего в состав двоичного умножителя 28 (фиг.1), Выходы элементов 52, 53, вы 58 и 59(фиг 4) связаны со входами элемента щи б х 1дой из координат здпбхт=пТ,60, а выходы элементов 54, 55, 56 и 57 связаны со входами элемента 61, Выходы элетов 60 и 61 образуют выходы блока 26 исления ошибки воспроизведения .1).Блок 21 сравнения, два входа которых инены с выходом блока 26 вычисления бки воспроизведения, предназначен сравнения ошибки воспроизведенияв дискретные моменты времени 1 = пТ данной максимально допустимой ошибео (см,фиг,8) и получения в унитарном и аллельном двоичном кодах величины Т превышения ошибки воспроизведея пТ над максимально допустимойбкой ео согласно соотношениям (2). С целью блок 21 связан с блоком 25 зада- максимально допустимой ошибки ибжен тремя выходами 22, 23 и 24, причем од 22 предназначен для передачи велиы ЛпТ в параллельном коде, а выходы и 24 - этой же величины в унитарном е. Выход 22 блока сравнения соединен входом управляемого генератора 18, а оды 23 и 24 этого же блока соединены со дами пересчетной схемы 29. Для обеспеия возможности получения величины Т в дискретные моменты времени т = пТ к 21 сравнения снабжен также входом альной установки, подключенным к выу 19 управляемого генератора 18, Блок 21 сравнения может быть выпол, например, так, как показано на фиг,5.т блок содержит три реверсивных счета 62. 63, 64, триггер 65, элемент 66 ИЛИ ва элемента 67, 68 И. Входы сложенияерсивных счетчиков 62 и 63 объединены ду собой, связаны с одним из двух вхоэлемента 67 И и образуют вход, блока 21 внения (фиг.1), к которому подключен одэлемента 60 ИЛИ(фиг,4), являющийся одом блока 26 вычисления ошибки воспзведения (фиг,1), Входы вычитания ресивных счетчиков 62 и 63 (фиг.5) также единены между собой, связаны с одним двух входов элемента 68 И и образуют д блока 21 сравнения (фиг,1), к которому ключен выход элемента 61 ИЛИ (фиг,4), яющийся выходом блока 26 вычисления ибки воспроизведения (фиг.1), Выходы еполнения реверсивных счетчиков 62 и (фиг.5) соединены со входами элемента ИЛИ, выход которого подключен к едичному входу триггера 65. Единичный выд этого триггера соединен с двумяальными входами элементов 67 и 68 И.ход элемента 67 И связан со входом слония реверсивного счетчика 64 и образует ход 23 (фиг.1) блока 21 сравнения, являюйся одним из двух выходов для передачи(8) Реверсивные счетчики 62 и 63 (фиг,5) .20снабжены соответственно входами 69 и 70 25 30 М 11+1092 ео,(7) 35 4045 50 55 в унитарном коде положительного значения величины ЛпТ), которая определяется согласно формуле (4). Выход элемента 68 И (фиг.5) связан со входом вычитания реверсивного счетчика 64 и образует выход 24 (фиг.1) блока 21 сравнения, являющийся вторым выходом для передачи в унитарном коде отрицательного значения величины Л пТ.Выходы разрядов реверсивного счетчика 64(фиг.5) образуют выход 22 (фиг.1) блока 21 сравнения. Этот выход служит для передачи параллельного кода величины Л(пТ.Реверсивный счетчик 64 (фиг,5) так же, как и реверсивные счетчики 62 и 63 снабжены входами установки в "0", Эти входы объединены между собой, связаны с нулевым входом триггера 65 и образуют вход начальной установки блока 21 сравнения (фиг.1),параллельной передачи кода, причем вход 69 служит для передачи прямого параллельного кода величины ео, а вход 70 - для передачи обратного параллельного кода этой же величины, Число разрядов реверсивных счетчиков 62, 63 определяется из соотношения а число разрядов реверсивного счетчика 64 равно числу М, причем старший разряд этого счетчика является знаковым.Блок 25 задания максимально допустимой ошибки может быть достаточно просто выполнен на переключательных элементах так, как показано на фиг.б, Этот блок содержит группу двухполюсных переключателей 71, число которых равняется числу реверсивных счетчиков 62 и 63 (фиг.5). При этом положение переключателей 71 однозначно определяется кодом величины ео. Контакты 72 и 73 всех переключателей 71 объединены между собой и подключены к шине логического "0", а контакты 74 и 75 этих же переключателей также объединены между собой и подключены к шине логической "1", Выходы средних точек 76 и 77 всех переключателей 71 образуют выход блока 25 задания максимально допустимой ошибки (фиг.1), причем выходы средних точек 76 служат для передачи прямого кода величины яо и соединены со входом 69 (фиг.5) блока 21 сравнения (фиг.1), а выходы средних точек 77 (фиг,б) всех переключателей 71 служат для передачи обратного кода величины ео и соединены со входом 70 (фиг.5) блока сравнения (фиг.1). Число групп двухполюсных переключателей 71 (фиг.б) равно числу М 1 разрядов реверсивных счетчиков 62 и 63 (фиг.5),Управляемый генератор 18 (фиг,1), вход которого соединен с выходом 22 блока 21, предназначен для задания темпа работы интерполятора 17, определяемого частотой 1 следования импульсов в зависимости от величины Ь(пТ) согласно формуле (3), а также для задания дискретных моментов времени с = пТ с периодом С этой целью управляемый генератор снабжен двумя выходами 19 и 20, причем выход 19 служит выходом для задания дискретных моментов времени 1= пТ, а выход 20 служит выходом для задания темпа работы интерполятора 17,Пример выполнения управляемого генератора 18 показан на фиг.7, Управляемый генератор состоит из задающего генератора 78, двоичного умножителя 79, делителя 80 частоты и блока 81 вентилей. Блок 81 вентилей снабжен управляющим входом, который подключен к выходу делителя 80 частоты, а также входом передачи параллельного кода, образующим вход управляемого генератора 18 (фиг.1), Блок 81 (фиг,7) может быть выполнен так, как показано на фиг.2, При этом единичные выходы всех разрядов (за исключением старшего разряда) реверсивного счетчика 64(фиг.5), входящего в состав блока 21 сравнения (фиг,1), связаны с третьими входами элементов 34 И (фиг.2), нулевые выходы указанных разрядов реверсивного счетчика 64 (фиг,5) связаны с третьими входами элементов 31 И (фиг.2), нулевой выход старшего разряда (разряда знака) реверсивного счетчика 64 (фиг.5) соединен со входом 39 (фиг,2), единичный выход старшего разряда счетчика 64 (фиг.5) соединен со входом 40 (фиг,2), Вход 38 служит управляющим входом блока 81 вентилей (фиг.7). Выход блока 81 вентилей подключен к одному входу двоичного умножителя 79, К другому входу этого двоичного умножителя подключен задающий генератор 78, Двоичный умножитель 79 может быть выполнен по схеме, показанной на фиг.З, При выполнении указанного двоичного умножителя по схеме, показанной на фиг.З, с блока 81 вентилей, выполненной по схеме, показанной на фиг,2, выходы элементов 32 ИЛИ (фиг,2) должны быть связаны с нулевыми входами триггеров разрядов регистра 42 (фиг.З), а выходы элементов 35 ИЛИ (фиг.2) должны быть связаны с единичными входами триггеров разрядов регистра42 (фиг,З). При этом задающий генератор 78 (фиг.7) должен быть соединен с одним из входов элемента 45 ИЛИ (фиг.З), Выход элемента 44 ИЛИ является выходом двоичного умножителя 79 (фиг.7) и образует выход 20 (фиг.1) управляемого генератора 18. Этот выход связан со входом делителя частоты (фиг.7), Выход этого делителя частоты образует выход 19 (фиг.1) управляемого генератора 18, Выход 20 управляемого генератора 1 18 подключен ко входу интерполятора 17.Интерполятор предназначен для формирования в унитарном коде заданных значений хф), у 1 т) положения исполнительного механизма контурной системы программного управления в каждый текущий момент времени 1 по координатам х и у. В качестве интерполятора 17 может быть использован, в частности, линейный интерполятор. В этом случае он может быть выполнен на базе двух однотипных двоичных умножителей, имеющих общий делитель частоты, к входу которого должен быть подключен выход 20 управляемого генератора 18, Интерполятор 17 снабжен двумя выходами для передачи в унитарном коде величины х 1(т) и двумя выходами для передачи в унитарном коде величины у 1(1). При этом один из двух выходов для передачи величины хф) предназначен для передачи единичных положительных приращений этой величины, а другой - для передачи единичных отрицательных приращений указанной величины, один из двух выходов для передачи величины уф) предназначен для передачи единичных положительных приращений этой величины, а другой - для передачи единичных отрицательных приращений данной величины, Каждый из двух выходов интерполятора 17 соответствующий положительному приращению заданного положения исполнительного механизма по данной координате соединен со вторым входом элемента 12 ИЛИ следящей системы этой же координаты, а каждый из двух выходов интерполятора, соответствующий отрицательному приращению заданного положения исполнительного механизма соединен со вторым входом элемента 11 ИЛИ следящей системы этой же координаты.К выходу элемента 11 ИЛИ каждой следящей системы подключены одни входы элементов 13, 15 ИЛИ этой же следящей системы, к выходу элемента 12 ИЛИ каждой следящей системы подключены одни входы элементов 14, 16 ИЛИ этой же следящей системы, Два других входа элементов 13, 16 ИЛИ обеих следящих систем объединены между собой и соединены с выходом пере- счетной схемы 29, соответствующим полоО пТ = дхпт+ пт;(9) 40 реверсивный счетчик 4 следящей системыпо координате х предназначен для определения в дискретные моменты времени вели- чины 9 пТ = дхпт - пТ; 45(10) реверсивный счетчик 3 следящей системы по координате у предназначен для определения в дискретные моменты времени вели чины 6 пТ = дупт+ фпТ; реверсивный счетчик 4 следящей системы55 по координате у предназначен для определения в дискретные моменты времени вели- чины% пт = дпт+4 пт; жительному единичному приращению величины К Лпт, где К1 - коэффициент пересчета. Два других входа элементов 14 и 15ИЛИ обеих следящих систем объединены5 между собой и соединены с выходом пересчетной схемы 29, соответствующим отрицательному единичному приращениювеличины К Ь пТ,Пересчетная схема 29 может быть вы 0 полнена, например, в виде двух однотипныхделителей частоты или двоичных умножителей. В последнем случае двоичный умножитель может быть выполнен как показано нафиг,З. При этом регистр 42 служит для зада 15 ния величины коэффициента К, причем самрегистр 42 может быть выполнен на переключательных элементах аналогично схемеблока задания максимально допустимойошибки, показанной на фиг,6,20 Выход элемента 13 ИЛИ (фиг,1) даннойследящей системы связан с суммирующимвходом реверсивного счетчика 3 этой же следящей системы, а выход элемента 14 ИЛИданной следящей системы связан с вычитаю 25 щим входом реверсивного счетчика 3 указанной следящей системы. Выход элемента15 ИЛИ данной следящей системы связан ссуммирующим входом реверсивного счетчика 4 этой же следящей системы, а выход30 элемента 16 ИЛИ данной следящей системысвязан с вычитающим входом реверсивногосчетчика 4 указанной следящей системы,Реверсивный счетчик 3 следящей системы по координате х предназначен для опре 35 деления в дискретные моменты временивеличиныгде величинапТ) в формулах (7) - (10)определяется соотношением и - 1пТ) = К Х ЬпТ), (13)1=1которое является дискретным аналогомкорректирующей величины типа интеграласКЛ(т)с 3 т,оКонтурная система программного управления работает следующим образом.Перед началом работы проводятся следующие подготовительные операции, Вовсе реверсивные счетчики 1, 2, 3, 4 обеихследящих систем (фиг.1), реверсивные счетчики 62, 63,и 64 (фиг,5) блока 21 сравнения(фиг,1) и регистры 42 (фиг.З) двоичных умножителей 27, 28 (фиг,1) заносится число ноль.В регистр 42 (фиг.З) двоичного умножителя 79 (фиг.7), входящего в состав управляемого генератора 17 (фиг.1), заноситсячисло 2В блоке 25 задания максимально допустимой ошибки устанавливается в двоичном коде число япутемопределенной комбинации положений двухполюсных переключателей 71 (фиг,6). Приэтом на выходе двоичного умножителя 79(фиг.7) управляемого генератора 18 (фиг.1)возникает последовательность импульсов счастотой 1Р, где Г - частота задающегогенератора 78 (фиг.7), а на выходе делителя 80частоты - последовательность импульсов с частотой 1 о = 1/Т, где период Т связан с величиной 1 зависимостью (8). Последовательностьимпульсов с частотой 1 с выхода 20 (фиг.1)поступает на вход интерполятора 17, а последовательность импульсов с частотой 1, свыхода 19 поступает на первые управляющие входы обоих блоков 9 вентилей, на управляющие входы обоих блоков 10вентилей, на входы начальной установкидвоичных умножителей 27 и 28 и блока 21сравнения. В результате на выходах интерполятора 17 образуются последовательности импульсов, представляющие собойунитарные коды заданного перемещениях 1(т) и у 1(т) исполнительного механизма покоординатам х, у в текущий момент времени1. При этом на выход интерполятора 17, соответствующий положительному направлению заданного движения вдоль координатых, поступают импульсы только тогда, когдабхайздп - =+1, а на выход интерполятора,д 1соответствующий отрицательному направлению заданного движения вдоль этой жекоординаты х, поступают импульсы толькобхайтогда, когда з 1 дп = -1. Аналогичнымб 1 5 10 15 20 25 30 35 40 45 50 55 образом поступают импульсы на выходы интерполятора, соответствующие положительному и отрицательному направлениям движения вдоль координаты у, Общее число импульсов (с учетом знака), поступивших с выходов интерполятора 17 к текущему моменту времени т, однозначно определяют в этот момент времени заданное положение исполнительного механизма, которое условно изображено на фиг.8 точкой Р, При этом движение точки Р 1 по контуру происходит со скоростью, определяемой частотой 1, Поскольку же период Т следования импульсов на выходе 19 (фиг.1) управляемого генератора 18 определяется соотношением (8), то, независимо от скорости движения точки Р 1 (фиг.8) по контуру, всякий раз, когда на выходе 19 (фиг.1) возникает импульс, точка Р 1(фиг.8) перемещается по контуру на одно и то же расстояние, равное 2 (выраженное в числе импульсов).В том случае, когда в данный момент времени т заданное направление движения по данной координате является положительным, импульсы с выходов интерполятора 17 через элемент 11 ИЛИ поступают на суммирующие входы реверсивных счетчиков 1 и 2. Если же заданное направление движения по данной координате является отрицательным, импульсы с выхода интерполятора 17 через элемент 12 ИЛИ поступают на вычитающие входы этих же реверсивных счетчиков, Содержимое реверсивных счетчиков 2 определяют величины управляющих сигналов, которые через цифроаналоговые преобразователи 5 поступают на входы приводов 6. При положительном направлении движения исполнительного механизма по данной координате в данный момент времени импульсы с одного из выходов датчика 7 через элемент 12 ИЛИ поступают на вычитающие входы реверсивных счетчиков 1 и 2 следящей системы этой же координаты, а при отрицательном направлении движения исполнительного механизма по данной координате в данный момент времениимпульсы с другого выхода датчика 7 через элемент 11 ИЛИ поступают на суммирующие входы реверсивных счетчиков 1 и 2 той же следящей системы, В результате в реверсивных счетчиках 1 в каждый момент времени т образуются текущие ошибки дх(т) и ду(т) по двум координатам х и у соответственно, определяемые согласно выражению (4). Величины текущих ошибок дД) и ду(т) в момент времени т однозначно определяют фактическое положение исполнительного механизма в этот же момент времени т, которое на фиг,8 условно изобра
СмотретьЗаявка
4944923, 25.03.1991
ИНСТИТУТ КИБЕРНЕТИКИ ИМ. В. М. ГЛУШКОВА, ИНСТИТУТ ЭЛЕКТРОСВАРКИ ИМ. Е. О. ПАТОНА
ЖИТЕЦКИЙ ЛЕОНИД СЕРГЕЕВИЧ, ЦЫБУЛЬКИН ГЕННАДИЙ АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: контурная, программного
Опубликовано: 07.03.1993
Код ссылки
<a href="https://patents.su/22-1800446-konturnaya-sistema-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Контурная система программного управления</a>
Система управления реверсивным поршневымкомпрессором

Номер патента: 827843
Опубликовано: 07.05.1981
Авторы: Викторовский, Кириличенко
МПК: F04B 49/06
Метки: поршневымкомпрессором, реверсивным
...т. п.) от заданного значения на выходе автоматического регулятора 1 возникает управляющий ЗО сигнал, который по ается на один из двух входов коммутирующего устройства 2 привода 3 компрессора через распределительное устройство 4, вызывая вращение привода. Направление вращения привода 3 определяется тем, на какой из двух входов коммутирующего устройства 2 подает сигнал распределительное устройство 4. После выравнивания параметра управления до заданного значения привод 3 отключается, так как регулятор 1 снимает с выхода управляющий сигнал.Каждый раз, в случае отклонения параметра управления от заданного значения и включения привода, распределительное устройство 4 переадресует управляющий сигнал на другой вход коммутирующего устройства 2,...
Система для телесигнализации с временным разделением сигналов

Номер патента: 478346
Опубликовано: 25.07.1975
МПК: G08C 19/28
Метки: временным, разделением, сигналов, телесигнализации
...другого периферийного устройства 1. При этом в следующем такте никаких кодовых сигналов по линии связи не передается, что эквивалентно передаче кода 0000, который также 60 образуется путем прибавления к коду 1111 единицы, вследствие чего сигнал на выхо-, де блока сравнения 16 в этом такте также отсутствует. Если, в свою очередь, код 0000 является адресным кодом одного из периферийшых устройств 1, цепь генерации кодов в линию связи 3 автоматически восстанавливается и устройство продолжает свою работу.Таким образом, процесс опроса всех периферийных устройств 1, входящих в состав устройства, состоит в последовательной генерации в линию связи только адресных кодов этих устройств, чем сведена к достижимому минимуму избыточность...
Система для телесигнализации с временным разделением сигналов

Номер патента: 484546
Опубликовано: 15.09.1975
Авторы: Белоносов, Иванов, Оправин, Румакин
МПК: G08C 19/28
Метки: временным, разделением, сигналов, телесигнализации
...ситуация устранена), нд первой временной позиции кода ца выходе амплцтудного дискриминатора 17 возццкнет единичный сигнал, который в сочетании с нулевым значением идентификатора, поступающего цз блока памяти 19, вызовет появление сигнала нд выходе ЗЗ блока 18 логической обработки, поступающего далее ца соответствуюпцй вход блока управления 15, на командном выходе которого появится сигнал, отпцрд ощий только вентиль 30. Прп этом алресцьп код данного периферийного устройства из регистра 11 вводится в блок 16 оконечного преобразования, и туда же одновременно вводится сигнал с выхода 35 блока управления 15, индицируощий характер возникшей ситуации (в данном случае - включение периферийного устройства 1).В этом же такте, благодаря наличию...
Система для телесигнализации с временным разделением сигналов

Номер патента: 518789
Опубликовано: 25.06.1976
Авторы: Иванов, Малков, Румакин
МПК: G08C 19/28
Метки: временным, разделением, сигналов, телесигнализации
...подается сигнал, поступающийна второй вход индикатора 10 занятостиблока оконечного преобразования, устанавливающий его в исходное состояние, в результате чего отпираются вентили 15 и 16, пой дается разрешающий сигнал на управляющийвход блока управления 7, а также запираются вентили 12 и 14, после чего приемноеустройство 2 оказывается готовым к приему новой информации, Аналогичным обра эом работает система при возникновениисигнала на каком-либо из входов 17 одногоиз периферийных устройств 1. При этом соответствующее периферийное устройство 1передаег сообщение о принятой им информации в виде последовательности кодов, состояшей из "единичного" кода, обрываюшегопиркулируюшую по линии связи 3 последовательность адресных-ответных кодов,...
Система пространственной коммутации с временным делением

Номер патента: 522836
Опубликовано: 25.07.1976
МПК: H04Q 3/54
Метки: временным, делением, коммутации, пространственной
...входы информационно-адресных регистров 2-2-1, 2-3-1 ирегистров 2-2-2, 2-3-2 последующихступеней 2-2 и 2-3 пространственного коммутатора 2 обьединень соответственно.Узел 1-1-7 пространственно-адресной памяти имеет число столбцов, равное числубя пространственного адреса, и число рядов, равное числу групп проб речи,Система работает следующим образом.Каждый узел памяуи речи 1-1-1,1 - М - 1 содержит образец информации, которяй записывается узлом 1-1-4 временного деления, а также адрес, записываемыйузлом памяти управления 1-1-6 от компьютера 4, Указанные адреса последовательносчитывеотся из узла 1-1-6 импульсамигечератора 5. Узел памяти 1-1-1 и узелпамяти 1-1-6, имеют регистры 1-1-2 и1-1-5, которые выдают информацию грипоступлении на их...
Предыдущий патент: Устройство для программного управления
Следующий патент: Устройство контроля параметров
Случайный патент: Выходной двухтактный каскад