Электрогидравлический следящий привод
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
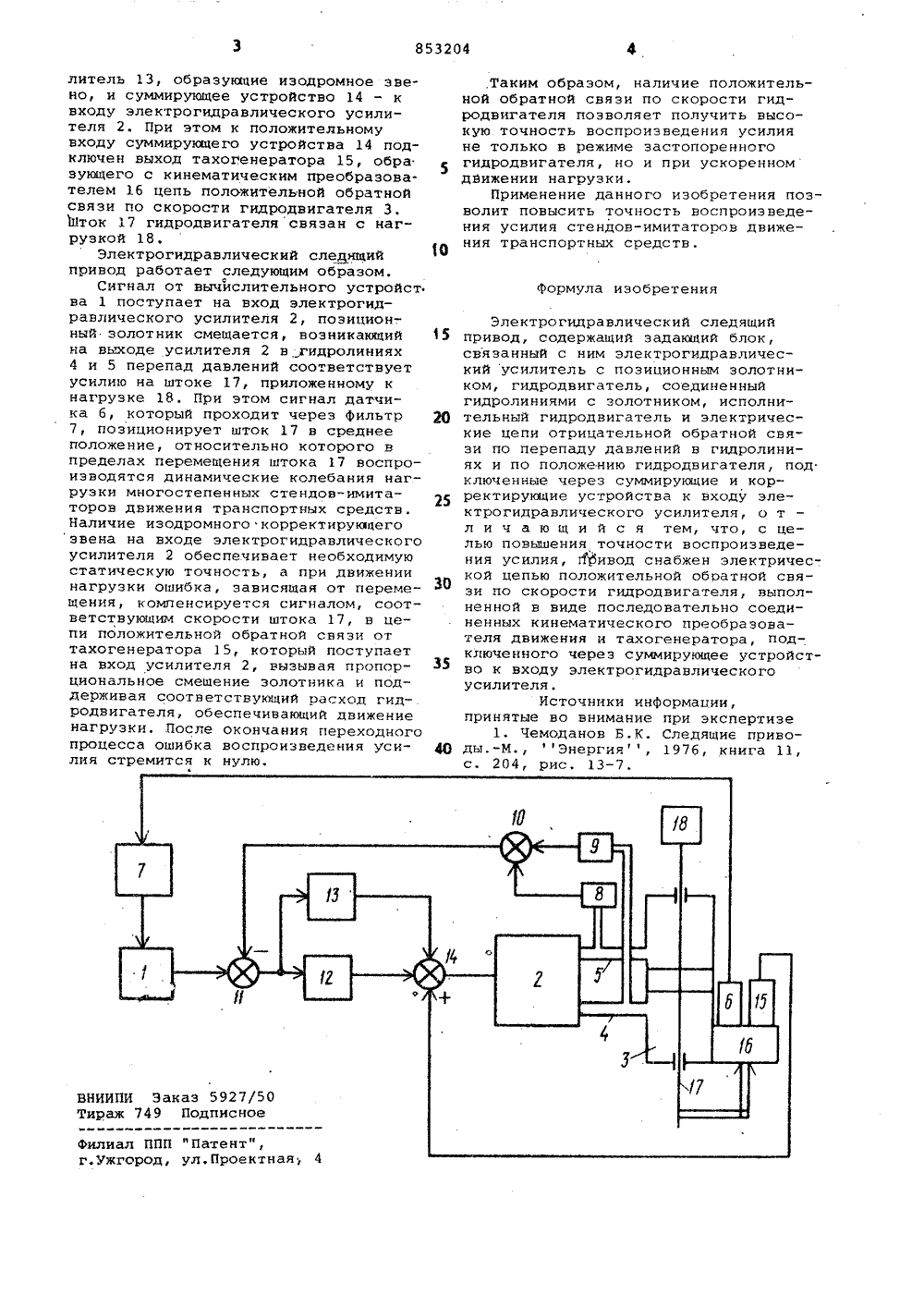
Союз Советских Социалистических Республик(21) 2860568/25-06 2 5,12.7 присоединениемз23) Приоритет Р 15 В 9 0 и дарственный комитетСССРделам изобретенийи открытий Опубликовано 0 Дата опубликова 1, Бюллетень М 29жип Изобретение относится к областигидроавтоматики и предназначено дляиспользования в системах стендовимитаторов движения транспортныхсредств для приложения к нагрузке силы, пропорциональной. напряжению входного сигнала,Известен электрегидравлическийследящий привод, содержащий -задающийблок, связанный с ним электрогидравлический усилитель с позиционным золотником, исполнительный гидродвигатель, соединенный гидролиниями с зо,лотником, и электрические цепи отрицательной обратной связи по перепаду давления в гидролиниях и по положению гидродвигателя, подключенные через суммирующие и корректирующие устройства к входу электрогидравлического усилителя 1,Недостатком известного приводаявляется низкая точность воспроизведения усилия, связанная с возникновением расхода гидродвигателя придвижении нагрузки.Целью изобретения является повышение точности воспроизведения усительной обратной связи по скорости гидродвигателя, выполненной в виде последовательно соединенных кинематического преобразователя движения и тахогенератора, подключенного через суммирующее устройство к входу электрогидравлического усилителя.На чертеже изображен электрогидравлический следящий привод.Привод содержит задающее устройство, например вычислительное устройство 1, связанный с ним электрогидравлический усилитель 2 с позиционным золотником (на чертеже не изображен), 5 исполнительный гидродвигатель 3, соединенный гидролиниями 4 и 5 с золотником усилителя 2, электрические.цепи отрицательной обратной связи,одна иэ которых (по положению гидродвига теля 3) содержит датчик положения6, соединенный через Фильтр 7, пропускающий только частоту 0,05 Гц, с вычислительным устройством 1, а вторая (по перепаду давления в гидролиниях 4 и 5) содержит датчики давления 8 и 9, подключенные через суммирующие устройства 10 и 11 к выходу вычислительного устройства 1 и далее через корректирукцие устройства, ин-.0 тегратор 12 и пропорциональный уси853204 Формула изобретения ВНИИ Тира Фили г. Уж ул.П литель 13, образующие изодромное звено, и суммирующее устройство 14 - к входу электрогидравлического усилителя 2. При этом к положительному входу суммирующего устройства 14 подключен выход тахогенератора 15, обра зующего с кинематическим преобразователем 16 цепь положительной обратной связи по скорости гидродвигателя 3. Ьток 17 гидродвигателя связан с нагрузкой 18,Электрогидравлический следящий привод работает следующим образом.Сигнал от вычислительного устройст. ва 1 поступает на вход электрогидравлического усилителя 2, позиционный золотник смещается, возникающий на вьжоде усилителя 2 в гидролиниях 4 и 5 перепад давлений соответствует усилию на штоке 17, приложенному к нагрузке 18. При этом сигнал датчика 6, который проходит через фильтр 7, позиционирует шток 17 в среднее положение, относительно которого в пределах перемещения штока 17 воспроизводятся динамические колебания нагрузки многостепенных стендов-имитаторов движения транспортных средств. Наличие изодромного корректирующего звена на входе электрогидравлического усилителя 2 обеспечивает необходимую статическую точность, а при движении нагрузки ошибка, зависящая от перемещения, компенсируется сигналом, соответствующим скорости штока 17, в цепи положительной обратной связи от тахогенератора 15, который поступает на вход усилителя 2, вызывая пропорциональное смещение золотника и поддерживая соответствующий расход гидродвигателя, обеспечивающий движение нагрузки. После окончания переходного процесса ошибка воспроизведения усилия стремится к нулю..Таким образом, наличие положительной обратной связи по скорости гидродвигателя позволяет получить высокую точность воспроизведения усилия не только в режиме застопоренного гидродвигателя, но и при ускоренном дВижении нагрузки.Применение данного изобретения позволит повысить точность воспроизведения усилия стендов-имитаторов движения транспортных средств. Электрогидравлический следящий15 привод, содержащий задающий блок,связанный с ним электрогидравлический усилитель с позиционным золотником, гидродвигатель, соединенныйгидролиниями с золотником, исполни;Я тельный гидродвигатель и электрические цепи отрицательной обратной связи по перепаду давлений в гидролиниях и по положению гидродвигателя, под.ключенные через суммирующие и кор 25 ректирующие устройства к входу электрогидравлического усилителя, о тл и ч а ю щ и й с я тем, что, с целью повышения точности воспроизведения усилия, 1 Фивод снабжен электрической цепью положительной обратной связи по скорости гидродвигателя, выполненной в виде последовательно соединенных кинематического преобразователя движения и тахогенератора, подключенного через суммирующее устройство к входу электрогидравлическогоусилителя.Источники информации,принятые во внимание при экспертизе1. Чемоданов Б.К, Следящие приво 10 ды,-М., Энергия 1976, книга 11,с. 204, рис, 13-7.
СмотретьЗаявка
2860568, 25.12.1979
ПРЕДПРИЯТИЕ ПЯ А-1658
БРОДСКИЙ ЛАЗАРЬ ЕФИМОВИЧ, КУТУЗОВ ВЛАДИМИР КУЗЬМИЧ, МЕДЯКОВ ИГОРЬ НИКОЛАЕВИЧ, ТОЛПЫГИН ЕВГЕНИЙ ПЕТРОВИЧ
МПК / Метки
МПК: F15B 9/03
Метки: привод, следящий, электрогидравлический
Опубликовано: 07.08.1981
Код ссылки
<a href="https://patents.su/2-853204-ehlektrogidravlicheskijj-sledyashhijj-privod.html" target="_blank" rel="follow" title="База патентов СССР">Электрогидравлический следящий привод</a>
Гидравлический усилитель с обратной связью по расходу жидкости (скорости гидродвигателя)

Номер патента: 309190
Опубликовано: 01.01.1971
МПК: F16K 11/14
Метки: гидравлический, гидродвигателя, жидкости, обратной, расходу, связью, скорости, усилитель
...дросели 11 и 12, Полость между поясками 9 и 10 постоянно соединена со сливом каналом 13. Полости 14 и 15 постоянно соединены с подмембранными полостями 16 и 17, Мембраны 18 и 19 служат для перемещения обоймы 20, а это возможно благодаря тому, что сопла 7 и 8 соединены с кор пусом 1 гибкими элементами 21 и 22. Междусоплами установлена подвижная заслонка 23. Перемещение заслонки 23 в сторону какоголибо сопла вызовет уменьшение расхода че рез это сопло и увеличение расхода через другое сопло. Неравенство расходов через сопла приведет к неравенству давлений в камерах 3 и 4, вследствие чего золотник 2 начнет перемещаться и соединит одну из полостей гид родвпгателя с напорной линией, другую - сосливной. Слив жидкости из гидродвпгателя...
Широкополосный усилитель с комплексной обратной связью

Номер патента: 275150
Опубликовано: 01.01.1970
Авторы: Левашкин, Мелихов, Электронной
МПК: H03F 1/42
Метки: комплексной, обратной, связью, усилитель, широкополосный
...обеспечивающие отрицательную обратную связь, одновременно 3 входят в цепь внешнеи положительнои обратной связи, что в значительной степени уменьшает критичность их параметров Схема усилителя приведена на чертеже.Два усилительных каскада, собранных на лампа по схеме с общим катодом (или на полупроводниковых приборах - по схеме с общим эмиттером), охватываются каждый местной отрицательной частото-зависимой обратной связью. Часть выходного напряжения с катодной цепи каскада 1 подается на вход каскада 2 через индуктивность 3, конденсатор 4, сопротивление 5 по последовательной схеме подачи обратного напряжения. Величина конденсатора 4 должна быть несколько больше паразитной емкости каскада. Так как последняя определяется ориентировочно, то...
Способ диагностирования объекта, состоящего из последовательно соединенных функциональных блоков, охваченных обратными связями, и устройство для его осуществления

Номер патента: 1667013
Опубликовано: 30.07.1991
МПК: G05B 23/02
Метки: блоков, диагностирования, обратными, объекта, охваченных, последовательно, связями, соединенных, состоящего, функциональных
...устаиов тс" с,Гнь "и", При этОм напряжение на выхсдеГИ2;нбудет убыва Гь 17Где Ч на, НЗПРЯХ(8 ИС О,"ОХ(птеЛЬОГО а - сыщения усилиГеля В; Р - сопротивлен 8 резистора 42; 1 о - в ре м я в о эдей с 1; я сигнала "0". При неодио:.ратном ПОВтОреНИИ СбОЕВ НаПГЯ-"ИИ Иа =.:":Огак ГЛИН 21 (фиГ, ) будет Гропорцнон:.,ь ОЧвых - К 111 - К 2 то, где К 1=1/В 1, Кр=1/В 2. К 1 иК 2 подбираются для каждого ГЛИН, исходяиз статистических данных о числе и продолжительности сбоев, допустимых для блоков1 - 6: 5При каждом отказе блоков 1-6 сигнал"1" с датчиков 7 через элемент ИЛИ 25поступает на управляющий вход блока 22вычисления максимума. Этот сигнал закрывает ключ 33 (фиг. 3), отключая питание от 10конденсатора 31. Конденсатор 31 разряжается через резистор...
Усилитель с нелинейной обратной связью

Номер патента: 187082
Опубликовано: 01.01.1966
Автор: Секованов
МПК: H03K 3/04
Метки: нелинейной, обратной, связью, усилитель
...а ток ОЙ ОБРАТНОЙ СВЯЗЬЮ диода 7 уменьшается. По достижении входным током величины, при которой ток диода 7 уменьшается до нуля, дальнейшее увеличение входного тока, при условии, что сопротивле ния 4 и 5 много больше сопротивления 3 небудет усиливаться.При подаче на вход 9 тока отрицательнойполярности на выходе 10 также получается усиленный сигнал. При этом ток диода 6 О уменьшается, а ток диода 7 увеличивается, Подостижении входным током величины, при которой ток диода 6 уменьшается до нуля, дальнейшее усиление входного сигнала нс оуде: наблюдаться,5 Вариант усилителя с нелинейной обратнойсвязью (фиг, 2) отличается тем, что он содсржит дополнительный транзистор 11, эмцттер которого подключен к катоду второго диода цепи...
Датчик обратной связи для устройств управления с шаговыми двигателями

Номер патента: 408279
Опубликовано: 01.01.1973
МПК: G05B 21/02
Метки: датчик, двигателями, обратной, связи, устройств, шаговыми
...вторых входах трехвходовых ячеек 9 Иприсутствует нулевой уровень, запрещающий прохождение сигналов через эти ячейки. При поступлении пачки импульсов входной информации передний фронт первого импульса, проходя инвертор 10 управления, запрещает прохождение сигналов через промежуточные ячейки 5 И, отключая входы триггеров памя"и от выходов распределителя 2 импульсов, После полного отключения триггеров 3 памяти, т. е. появления на выходах всех промежуточных ячеек 5 И нулевых уровней, на выходе ячейки 6 ИЛИ разрешения проявляется нулевой уровень, который, проходя через инвертор 7 разрешения, разрешает прохождение сигналов через входную ячейку 8 на распределитель импульсов, формирующий на своем выходе сигнал, соответствующий отработке шага....
Предыдущий патент: Демпфируемый позиционный привод
Следующий патент: Устройство для вытягиванияслитка из кристаллизатора
Случайный патент: Выпускное устройство