Электрогидравлическая следящаясистема
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 808712
Авторы: Владимиров, Гришин, Цуриков


Текст
Союз Советскик Социалистическик РеспубликОП ИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИ ЕТЕЛЬСТВУ(22) Заявлено 030579 (21) 2759999/25-06 с присоединением заявки йо Государственный комитет СССР по делам изобретений и открытий(23) Приоритет Опубликовано 28.0231. Бюллетень ЙЯ 8 Дата опубликования описания 08. 0381(54 ) ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА Изобретение относится к электрогидроавтоматике, в частности к уст" ройствам с коррекцией динамических ф характеристик, и может быть использовано в электрогидравлических следящих приводах различных машин.Известна злектрогидравлическая следящая система, содержащая последовательно соединенные блок управления, гидроусилитель и исполнительный пидродвигатель с инерционной нагрузкой, снабженный датчиками перепада давлений и перемещения, связанными со входом .гидроусилителя (11.Недостатками этой системы является недостаточный диапазон регулирования в силу малой эффективности работы при увеличении уровня возмущающего воздействия, а также воэможность возникновения автоколебаний при совпадении собственной частоты привода с частотой собственных колебаний цепи управления.Цель изобретения - расширение диапазона регулирования и повышение устойчивости.Указанная цель достигается тем, что система снабжена сравнивающим устройством, блоком измерения частоты и автоматически регулируемым,Фильтром, при этом первое подключено входами к датчику перепада и блоку управления, а выходами - к гидро- усилителю и через блок измерения частоты, связанный с датчиком перепада и автоматически регулируемый фильтр, к датчику. перемещения.На чертеже изображена электрогидравлическая следящая система. Система содержит. последовательно соединенные блок управления 1,гидроусилитель 2, гидродвигатель3 с инерционной. нагрузкой 4, снаб женный датчиками .перепада 5 и перемещения 6. При этом сравнивающееустройство 7. подключено входами кдатчику 5 и блоку управления 1, авыходами - к гидроусилителю 2, и 20 через блок измерения частоты 8 ифильтр 9 к датчику 6.Электрогидравлическая следящаясистема работает следующим образом.Управляющий сигнал.от блока уп равления 1 поступает через гидроусилитель 2 на гидродвигатель 3, который перемещает инерционную нагрузку 4. Сигнал, пропорциональный величине перемещения штока гидродви,гателя 3, через датчик 6 обратной808712 коэффициент усиления датчика обратной связи 6 на этой частоте, предотвращая тем самым возможность возникновения автоколебаний.Применение предлагаемого изобре.". тения в электрогидравлических оледяцих приводах различных машин позволит расширить их диапазон регулирования и повысить их устойчивость, вследствие чего увеличится эФФективность. работы машин. Формула изобретения Составитель С.Рождественский Редактор М,Лысогорова Техред Е,Гаврилешко Корректор В,СиницкаяЗаказ 364/35 Тираж 760ВНИИПИ Государственного комитета СССРпо делам изобретений и открытий113035, Москва, Ж, Раушская наб., д. 4/5 Подписное Филиал ППП "Патент", г. Ужгород, ул. Проектная, 4 связи по положению поступает на вход гидроусилителя 2.При работе системы в области резонансных частот на шток гидродвигателя действуют максимальные нагрузки и значения перепада давлений в полостях гидродвигателя будут максимальными. При работе системы в области резонансных частот коррекция динамических характеристик проводится путем уменьшения величины сигнала управления и величины коэФфициента усиления датчика обратной связи 6. ИнФормацию о том, что система работает в области резонансных частот, получают из сравнивающего устройства 7. В случае резонансных режимов величина отношения сигнала с датчика 5, к величине управляющего сигнала будет в несколько раз превышать номинальную величину, В сравнивающем устройстве 7 сигналы управления от блока управления 1 и сигналы по нагрузке от датчика 5 сравниваются, и при превышении их разницы, определенной для каждого уровня входного воздействия величины, из сравнивающего устройства 7 поступает корректирующий сигнал в гидроусилитель 2 и в блок измерения частоты 8, В гидроусилителе 2 этот корректирующий сигнал вычитается из сигнала управления, а в блоке измерения частоты является разрешающим для Функционирования этого блока, который измеряет частоту сигналов, поступающих из датчика 5. Блок измерения частоты 8 подает соответствующий сигнал на автоматический настраиваемый Фильтр 9, уменьшающий Электрогидравлическая следящая15 система, содержащая последовательно соединенные .блок управления, гидроусилитель.и исполнительный. гидродвигатель с инерционной нагрузкой,снабженный датчиками перепада давлещ ний и перемещения, связанными совходом гидроусилителя, о т л и ч а-.ю щ а я с я тем, что, с целью расширения диапазона. регулирования иповышения устойчивости, системаснабжена сравнивающим устройством,блоком измерения частоты и автоматически регулируемым Фильтром, приэтом первое подключено входами кдатчику перепада и блоку управления, а выходами - к гидроусилителюи через блок измерения частоты, связанный с датчиком перепада и автоматически регулируемый фильтр, кдатчику перемещения.Источники инФормации,принятые во внимание при экспертизе1. Авторское свидетельство СССРР 283763, кл. Г 15 В 9/03, 1969
СмотретьЗаявка
2759999, 03.05.1979
ПРЕДПРИЯТИЕ ПЯ Р-6601
ЦУРИКОВ ЮРИЙ АЛЕКСАНДРОВИЧ, ГРИШИН ВЛАДИМИР НИКОЛАЕВИЧ, ВЛАДИМИРОВ АЛЕКСАНДР ВЛАДИМИРОВИЧ
МПК / Метки
МПК: F15B 9/03
Метки: следящаясистема, электрогидравлическая
Опубликовано: 28.02.1981
Код ссылки
<a href="https://patents.su/2-808712-ehlektrogidravlicheskaya-sledyashhayasistema.html" target="_blank" rel="follow" title="База патентов СССР">Электрогидравлическая следящаясистема</a>
Преобразователь сигнала датчика углового перемещения в сигнал колебания угловойскорости

Номер патента: 423044
Опубликовано: 05.04.1974
Автор: Китра
МПК: G01P 3/52
Метки: датчика, колебания, перемещения, сигнал, сигнала, углового, угловойскорости
...генератор пилообразного напряжения 4 с синхронизирующим звеном 5. Преобразователь рразом.Датчик углового перемещения 6 при вращении измеряемого ооьекта выдаст пилооб разное напряжение, частота которого пропорциональна частоте вра 1 ценпя ва; а, а мгновенные значения амплитуды пропорциональны величине поворота вала. При неравномерности вращения вала сигнал датчика 6 (в О пределах одного оборота вала) возрастаетнепрямолинейно. Генератор пилообразного напряжения 4, вьшолнснньш на основе блокинг-генератора или мультивибрагора, генерирует пилообразное напряжение, частота которого синхронпзируется сигналом датчика 6 через синхронизпрующее звено 5, которое выполнено в виде дифференцирую 1 цен цепочки, дающей кратковременные импульсы,...
Преобразователь сигнала датчика в управляющий сигнал
Номер патента: 372442
Опубликовано: 01.01.1973
Авторы: Вител, Литвин, Маликов, Самойленко, Смирнов
МПК: G01D 5/12
Метки: датчика, сигнал, сигнала, управляющий
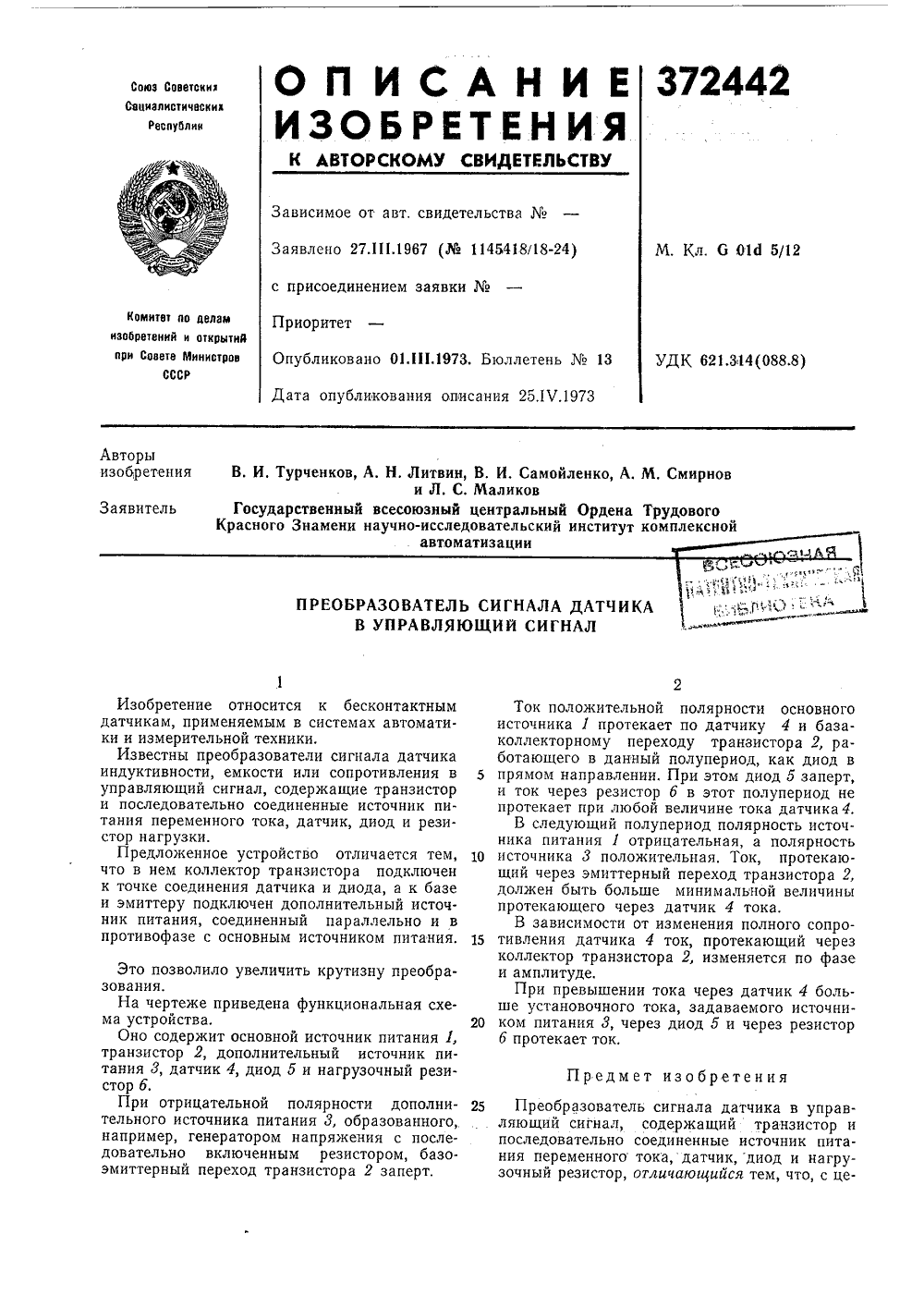
...диод и резистор нагрузки.Предложенное устройство отличается тем, что в нем коллектор транзистора подключен к точке соединения датчика и диода, а к базе и эмиттеру подключен дополнительный источник питания, соединенный параллельно и в противофазе с основным источником питания,Это позволило увеличить крути рзования.На чертеже приведена функциональнама устройства,Оно содержит основной источник питатранзистор 2, дополнительный источитания 3, датчик 4, диод 5 и нагрузочныистор б,При отрицательной полярности дотельного источника питания т, образовнапример, генератором напряжения сдовательно включенным резистором,эмиттерный переход транзистора 2 зап ральныи Ордена Трудовогоельский институт комплекснойации Ток положительной полярности...
Формирователь сигнала датчика частоты вращения

Номер патента: 1327282
Опубликовано: 30.07.1987
МПК: G11B 15/46, H03K 5/153
Метки: вращения, датчика, сигнала, формирователь, частоты
...шиной 3,а выходом Аормирователя являются вы.ходы КБ-триггера 4,Формирователь работает следующимобразом.Сигнал с датчика частоты вращения(не показан) через усилитель или непосредственно поступает на сигнальную шину 3 (Лиг,2 диаграмма 10), навремя превышения которым уровня верхнего порога на выходе элемента 1 шормируется отрицательный импульс (Фиг,2" диаграмма 11). Аналогичный импульсформируется на выходе элемента 2 вовремя превышения по абсолютной величине нижнего порога (Лиг,2 диаграмма 12), Пороговый элемент 8 переключается при пересечении входным сигналом нулевого уровня (йиг,2 диаграмма13). Отрицательный перегад напряже 27282 2ния с порогового элемента 1 переключает триггер 7 по входу Б, а по входу К триггер 7 управляется...
Устройство для преобразования сигнала датчика магнитной восприил1чивости

Номер патента: 327431
Опубликовано: 01.01.1972
Авторы: Институт, Молчанов, Нехорошков, Ордена, Пономарев
МПК: G01V 3/18
Метки: восприил1чивости, датчика, магнитной, преобразования, сигнала
...или какой-либо иной конструкции.Устройство действует следующим образом.Когда датчик находится в немагнитной сре де, его индуктивное,и активное сопротивлениясоответственно равны индуктивному и активному сопротивлениям коипенсационного элемента. Отфильтрованное от четных гармоник напряжение основной частоты подводится к 15 клеммам 5, б. Так как, благодаря идентичносги обеих плеч, нагрузка по переменному таку во ьсе полупериеды одинакова, то четные гармоники, которые компенсируются и в точках 5, б, отсутспвуют. Если датчик попадает в маг нигную среду, его индукгианое сопротивлениеувеличяваегся, а у компенсационного элемента остается,прежним. Следовательно, в одном из полупериодов ток в цепи больше, чем во втором, т. е. в точках 5 и б...
Устройство для измерения направления перемещения подвижного элемента растрового датчика перемещения

Номер патента: 1657956
Опубликовано: 23.06.1991
Автор: Павлов
МПК: G01B 21/00
Метки: датчика, направления, перемещения, подвижного, растрового, элемента
...элемента 4 относительно неподвижных элементов 5 на выходе фотоприемников 8,9 формируются сигналы, фазы которых смещены друг относительно друга на 9) . Сигнал с фотоприемника 8 посту пает на нуль-орган 10.Сигнал с фотоприемника 9 поступает на входы компаряторов 12 уровня, входящих в блок 11 цифрового дифферен,цирования. При увеличении и уменьше 1 нии сигнала, поступающего с фотопри 1 емника 9 относительно нулевого уров ня, происходит последовательное срабатывание компараторов 12 уровня, на выходе которых формируется параллельный код, значение которого связано с амплитудой сигнала, снимаемого с фотоприемника 9, Дешифратор 14 кода, входящий в дешифратор 13, производит преобраэ пяние кода, снимаемого 4 О с компяраторов 12 уровня, в...
Предыдущий патент: Вытеснительный бак
Следующий патент: Электрогидравлический привод
Случайный патент: Устройство для крепления концов рабочего каната