Способ управления асинхронным двигателем
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
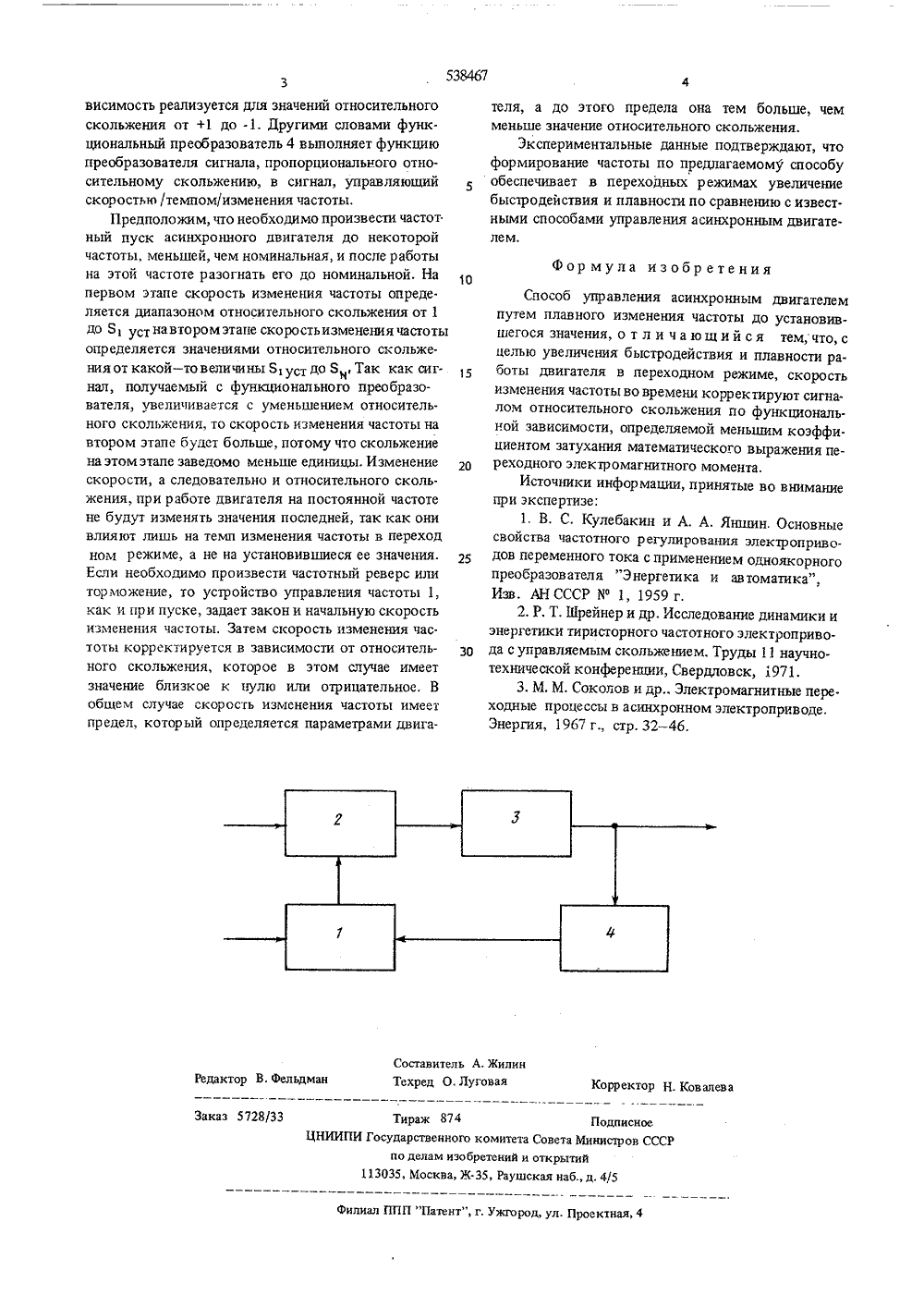
538467 10 Составитель А. ЖилинТехред О. Луговая Редактор В. Фельдман КоРРектоР Н. Ковалева Заказ 5728/33 Тираж 874 Подписное ЦНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб д. 4/5Филиал ППП "Патент", г. Ужгород, ул. Проектная, 4 висимость реализуется для значений относительного скольжения от +1 до -1. Другими словами функциональный преобразователь 4 выполняет функцию преобразователя сигнала, пропорционального относительному скольжению, в сигнал, управляющий скоростью /темпом/изменения частоты,Предположим, что необходимо произвести частот ный пуск асинхронного двигателя до некоторой частоты, меньшей, чем номинальная, и после работы на этой частоте разогнать его до номинальной, На первом этапе скорость изменения частоты опреде. ляется диапазоном относительного скольжения от 1 до Б, уст навтором этапе скоростьизменения частоты определяется значениями относительного скольжения от какой - то величины Б уст до Б, Так как сигинал, получаемый с функционального преобразователя, увеличивается с уменьшением относительного скольжения, то скорость изменения частоты на втором этапе будет больше, потому что скольжение на этом этапе заведомо меньше единицы. Изменение скорости, а следовательно и относительного скольжения, при работе двигателя на постоянной частоте не будут изменять значения последней, так как они влияют лишь на темп изменения частоты в переход ном режиме, а не на установившиеся ее значения. Если необходимо произвести частотный реверс или торможение, то устройство управления частоты 1, как и при пуске, задает закон и начальную скорость изменения частоты. Затем скорость изменения час. тоты корректируется в зависимости от относительного скольжения, которое в этом случае имеет значение близкое к нулю или отрицательное. В общем случае скорость изменения частоты имеет предел, который определяется параметрами двигателя, а до этого предела она тем больше, чем меньше значение относительного скольжения,Экспериментальные данные подтверждают, что формирование частоты по предлагаемому способуобеспечивает в переходных режимах увеличение быстродействия и плавности по сравнению с известными способами управления асинхронным двигателем. Формула изобретения Способ управления асинхронным двигателемпутем плавного изменения частоты до установившегося значения, о т л и чающий ся тем;что,сцелью увеличения быстродействия и плавности работы двигателя в переходном режиме, скоростьизменения частоты во времени корректируют сигналом относительного скольжения по функциональной зависимости, определяемой меньшим коэффициентом затухания математического выражения переходного электромагнитного момента,Источники информации, принятые во вниманиепри экспертизе:1, В. С. Кулебакин и А, А, Яншин. Основныесвойства частотного регулирования электроприводов переменного тока с применением одноякорногопреобразователя Энергетика и автоматика",Изв. АН СССР У 1, 1959 г.2, Р. Т. Шрейнер и др. Исследование динамики иэнергетики тиристорного частотного электроприво 30 да с управляемым скольжением. Труды 11 научнотехнической конференции, Свердловск, 1971.3. М, М, Соколов и дрЭлектромагнитные пере.ходные процессы в асинхронном электроприводе.Энергия, 1967 г., стр. 32 - 46.
СмотретьЗаявка
1768530, 04.04.1972
НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ АВТОМАТИКИ И ЭЛЕКТРОМЕХАНИКИ ПРИ ТОМСКОМ ПОЛИТЕХНИЧЕСКОМ ИНСТИТУТЕ ИМ. С. М. КИРОВА
ПАНТЕЛЕЕВ ВАСИЛИЙ ИВАНОВИЧ, СОУСТИН БОРИС ПОРФИРЬЕВИЧ, МИХНЕВИЧ НИКОЛАЙ АЛЕКСЕЕВИЧ
МПК / Метки
МПК: H02P 7/42
Метки: асинхронным, двигателем
Опубликовано: 05.12.1976
Код ссылки
<a href="https://patents.su/2-538467-sposob-upravleniya-asinkhronnym-dvigatelem.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления асинхронным двигателем</a>
Одномашинный асинхронный преобразователь частоты

Номер патента: 70031
Опубликовано: 01.01.1948
Автор: Имас
МПК: H02K 47/24, H02M 5/32
Метки: асинхронный, одномашинный, частоты
...взаимоиндукции их равен нулю.Разместим на роторе такую же пару обмоток н соединим их между собой (фиг. 3) так, чтобы они вместе образовали одну короткозамкнучую обмотку, состоящую из двухфазных обмоток: с 2 р - 2 и сокращен 4ным шагом р= - т и 2 р,=10 с диаметральным шагом. Обмотки ротора5надо сфазировать так, чтобы поле скольжения многополюсной обмотки вращалось согласно с ротором.Если подключить двухполюсную статорную обмотку к сети, то ротор развернется в соответствии с полюсностью машины и число оборотов его будет близко к 3000 в 1 лик (учитывая скольжение), Десятиполюсная обмотка ротора, связанная электрически с двухполюсной, возбудится током частоты скольжения. Поле, созданное в результате протекания тока по этой обмотке, будет...
Одномашинный асинхронный преобразователь частоты

Номер патента: 73582
Опубликовано: 01.01.1948
Автор: Имас
МПК: H02K 47/24, H02M 5/32
Метки: асинхронный, одномашинный, частоты
...последовательно соединенных обмоток, которые,при питании трехфазным током образуют две системы вращаю 17 ф щихся полей с различными числами пар полюсов. При этом на роторе располагаются две обмотки, однаиз которых замыкается накоротко,а вторая выводится на три кольца,с которых производится питание цепей преобразованной частоты,Преобразуемая частота можеттакже сниматься со второй статопной обмотки, а первичная ча:тотаподводится из сети к первичной об.мотке статора и через кольца - - ксоответствующей роторной обмотке.Предмет изобретения1, Одномашинный асинхронныйпреобразователь частоты с двумяобмотками на статоре и двумя обмотками на роторе, с различнымшагом одной и другой пары обмоток, отличающийся тем, чтостношение шагов первой и...
Асинхронный преобразователь частоты

Номер патента: 131403
Опубликовано: 01.01.1960
Автор: Загрядцкий
МПК: H02K 47/26, H02M 5/32
Метки: асинхронный, частоты
...собой электрическую машину с двумя статорными магнитопроводами, несущими соответственно трехфазные обмотки 1 и 2, и общим ротором, снабженным трехфазной обмоткой 3. Роторпая обмотка 3 присоединена к первичной сети с частотой 1 ь Статорные обмотки 1 и 2 соединены между собой последовательно; при этом с обмотки 2 снимается вторичное напряжение с частотой ,.Магнитопровод с обмоткой 1 укреплен неподвижно, а магнитопровод с обмоткой 2 может поворачиваться вокруг оси преобразователя, например, посредством червячной передачи, вследствие чего угол между обеими обмотками изменяется, При этом плавно изменяется выходное напряжение от максимального значения до нуля.Поворотными можно выполнить и оба статорных магнитопровода. Вращая их в...
Асинхронный преобразователь частоты

Номер патента: 148846
Опубликовано: 01.01.1962
Авторы: Абрамов, Михайлов-Микулинский, Петров, Пухов
МПК: H02K 47/24, H02K 47/26, H02M 5/32
Метки: асинхронный, частоты
...из статорных обмоток, вторая же а к сети первичной частоты, отл и ч а юшения электрических свойств преобразо. рименен отдельный двигатель. Асинхронные преобразователи частоты, имеющие на статоре и роторе по две обмотки, известны.Предлагаемое изобретение имеет целью улучшить электрические свойства преобразователя,Отличительной особенностью этого изобретения является применение ля вращения ротора отдельного двигателя.На чертеже приведена электрическая схема предлагаемого асин. хронного преобразователя.Асинхронный преобразователь частоты состоит из двух машин: асинхронного двигателя Д и собственного бесконтактного преобразователя частоты БП 4. Роторы этих машин расположены на общем валу. Статор и ротор преобразователя частоты БП 4 имеют...
Устройство для регулирования скорости асинхронных и синхронных двигателей при помощи ионного преобразователя частоты

Номер патента: 54966
Опубликовано: 01.01.1939
Автор: Завалишин
МПК: H02P 7/58
Метки: асинхронных, двигателей, ионного, помощи, преобразователя, синхронных, скорости, частоты
...схема предлагаемого устройства, на фиг. 2 в электрическ схема цепи управления вентилями.Предлагаемое устройство составляют следующие элементы: фазорегулятор Р (или приспособление для получения искусственной нулевой точки при регулировке напряжения помощью отсечки); тиратроны 1, 2 б;1, 2 б; 1", 2"б"; трансформатор с шестифазной первичной 7, и трехфазной вторичной 7 я обмотками и с разделенными нулевыми точками каждой трехфазной группы первичной обмотки; реактивная катушка Е 1, служащая для сглаживания тока; разделительная катушка 1.служащая для одновременного пропускания тока через фазы первичной обмотки 71 трансформатора; конденсаторы С СС.включенные параллельно втоКоммутатор может применяться и при других схемах питания...