Способ определения кинематических параметров шахтных машин
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
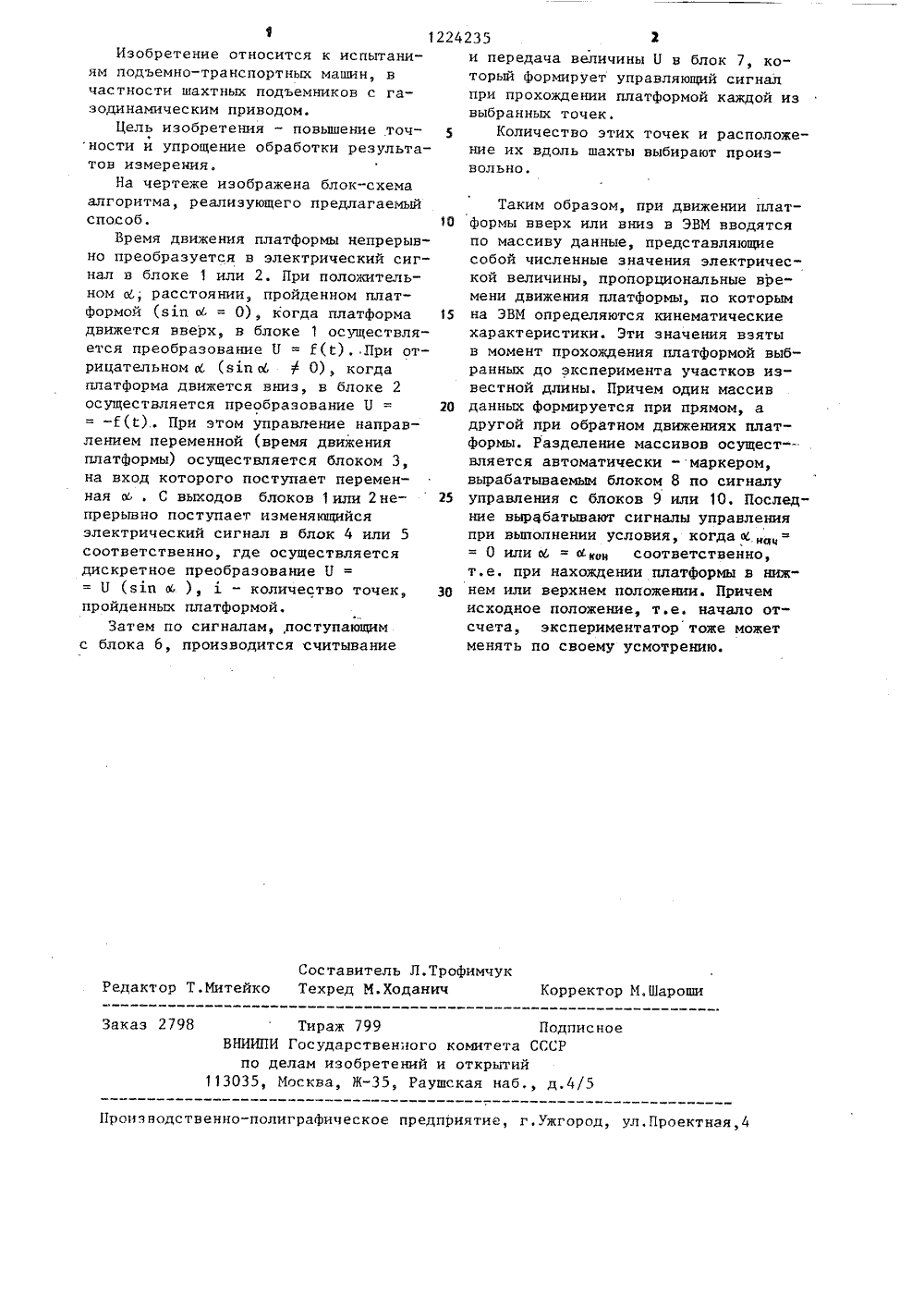
Заказ 2798 Тираж 799 Подпис ноеВНИИПИ Государственного комитета СССРпо делам изобретений и открытий113035, Москва, Ж, Раушская наб д.4/5 Производственно-полиграфическое предприятие, г.ужгород, ул,Проектная,4 1 1Изобретение относится к испытаниям подъемно-транспортных машин, вчастности шахтных подъемников с газодинамическим приводом.Цель изобретения - повышение точности и упрощение обработки результатон измерения.На чертеже изображена блок-схемаалгоритма, реализующего предлагаемыйспособ,Время движения платформы непрерывно преобразуется в электрический сигнал в блоке 1 или 2. При положительном а, расстоянии, пройденном платформой (зп о = О), когда платФормадвижется вверх, в блоке 1 осуществляется преобразование Б = Г(г.), При отрицательном к (з 1 п Ы Ф 0), когдаплатформа движется вниз, в блоке 2осуществляется преобразование П= -Г. При этом управление направлением переменной (время движенияплатформы) осуществляется блоком 3,на вход которого поступает переменная ж , С выходов блоков 1 или 2 непрерывно поступает изменяющийсяэлектрический сигнал в блок 4 или 5соответственно, где осуществляетсядискретное преобразование П == П (зп о ),- количество точек,пройденных платформой.Затем по сигналампоступающимс блока 6, производится считывание 224235 2и передача величины Б в блок 7, который формирует управляющий сигналпри прохождении платформой каждой извыбранных точек.5 Количество этих точек и расположение их вдоль шахты выбирают произвольноТаким образом, при движении плат О Формы вверх или вниз в ЭВМ вводятсяпо массиву данные, представляющиесобой численные значения электрической величины, пропорциональные времени движения платформы, по которым 15 на ЭВМ определяются кинематическиехарактеристики. Зти значения взятыв момент прохождения платформой выбранных до эксперимента участков известной длины. Причем один массив 20 данных Формируется при прямом, адругой при обратном движениях платФормы. Разделение массивов осущест вляется автоматически " маркером,вырабатываемым блоком 8 по сигналу 25 управления с блоков 9 или 10, Последние вырабатывают сигналы управленияпри выполнении условия, когда к"= О или с = к соответственно,т.е. при нахождении платформы в ниж- ЗО нем или верхнем положении. Причемисходное положение, т.е. начало отсчета, экспериментатор тоже можетменять по своему усмотрению.
СмотретьЗаявка
3404802, 04.03.1982
РИЖСКИЙ КРАСНОЗНАМЕННЫЙ ИНСТИТУТ ИНЖЕНЕРОВ ГРАЖДАНСКОЙ АВИАЦИИ ИМ. ЛЕНИНСКОГО КОМСОМОЛА
ЕНЕНКОВ ВЯЧЕСЛАВ ГЕОРГИЕВИЧ, МАРКЕЛОВ ИГОРЬ НИКОЛАЕВИЧ, НОВИКОВ ЮРИЙ АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: B66B 9/00
Метки: кинематических, машин, параметров, шахтных
Опубликовано: 15.04.1986
Код ссылки
<a href="https://patents.su/2-1224235-sposob-opredeleniya-kinematicheskikh-parametrov-shakhtnykh-mashin.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения кинематических параметров шахтных машин</a>
Блок цветового преобразования радиационного интроскопа

Номер патента: 446814
Опубликовано: 15.10.1974
Авторы: Добромыслов, Медяник, Румянцев
МПК: G01N 23/04
Метки: блок, интроскопа, преобразования, радиационного, цветового
...регулировку порога ограничения; инвертор 16; инвертор Х 7, вход которого соедйнен с выходом ограничителя снизу 15 и который имеет два выхода," выполненнйй по обычной схеме йа двух усилителях с общей анодной нагрузкой суммирующий усилитель 18, скла- дывающиИ сигналы от инверторов 16и Х 7 и имеющиИ регулируемый линейный коэффициент передачи по каждому входу и инвертор 19. Вход ,инвертора 1 б соединен с выходомограничителя снизу И, один выход инвертора 16 соединен с выходом (каналом) 20 блока цветового преобразования 7, а второй - с первым входом суммирующего усилителя 8. Вход инвертора Х 9 соединен с выходом суммирующего усилителя 18, а выход 2 Х является выходом (каналом) блока цветового преобразования 7. Инвертор Х 7 имеет два...
Платформа для ремонта котлов энергетических блоков

Номер патента: 1242595
Опубликовано: 07.07.1986
Автор: Изможеров
МПК: B66C 13/04, E04G 3/16
Метки: блоков, котлов, платформа, ремонта, энергетических
...несущая балка 13 со смонтированными на ней балансирами 14, отклоняющие блоки 15, уравнительныеблоки 16, проушиныКаркас 1 платформы состоит из сис.темы балок и ферм, связанных междусобой, на которые укладываются отдельные щиты настила 2.Платформа перемещается с помощьюдвух лебедок 6, тросы 4 и 5 которыхобразуют четыре подвесные ветви, идущие от лебедок к узлам 12 крепления.При ослаблении подвесных канатовплатформа может висеть на страховочных целях 7, фиксаторы 8 выдвигаютсяпосле подъема платформы на рабочийуровень и убираются перед перемещением платформы. Перекос платформы исключается за счет опорньм катков 9,попарно установленных с двух сторони перекатывающихся по стенкам-направляющим 10.Устройство работает следующим...
Измерительная система с автоматическим контролем аналого цифрового преобразования и блок задания нечувствительности

Номер патента: 1837261
Опубликовано: 30.08.1993
МПК: G05B 23/02, G06F 11/20
Метки: автоматическим, аналого, блок, задания, измерительная, контролем, нечувствительности, преобразования, цифрового
...Блок управления блока переключения каналов состоит из регистра 59, токозадающего резистора В дешифратора 60, 16-ти логических элементов 2 И 61-76, 24-х усилителей 77 - 100, 24 реле 101 - 124 с соответствующими коммутирующими элементами и 8-ми инверторов 125 - 132. Информационный вход 33 регистра 59 является входом команд блока, Управляющий вход регистра 59 является стробирующим входом блока, к нему присоединен третий управляющий выход 29 блока интерфейса 9, Выходы трех младших разрядов регистра 59 соединены со входами дешифратора 60. Выход четвертого разряда регистра 59 соединен с первыми входами логических элементов 68 - 74 и со входом усилителя 91. Выход пятого разряда регистра 59 соединен с первыми входами логических элементов...
Устройство для извлечения и установки блоков в стойку радиоаппаратуры

Номер патента: 997269
Опубликовано: 15.02.1983
Авторы: Кашеваров, Лазарев, Рахно
МПК: H05K 5/02
Метки: блоков, извлечения, радиоаппаратуры, стойку, установки
...8 содержит направляющие 22, по которым двигается блок 5 при уста новке, Штепсельные разъемы 23 установлены на задней панели блока 5 в плоскости вектора прикладываемой силы, а ответные разъемы 24 установлены в стойке 8. Необходимым условием для работы устройства является выполнение размера 6 Ъ половины длины штыря штепсельного разъема 23.Устройство работает следующим образом. 35Электронный блок 5 устанавливает" ся на направляющие 22 стойки 8 и продвигается вперед до упора штырей разъемов 23 в гнезда ответных разъемов 24, При этом штыри 11 вошли во втулки 13, Затем устанавливаются съемные упоры б и 9. Съемник 1 своими . роликами 3 и 4 вставляется н пазы 7 и 10 упоров б и 9 соответственно. При этом рукоятка 2 съемника 1 нап; равлена...
Устройство для контроля цифровых блоков

Номер патента: 1303999
Опубликовано: 15.04.1987
Авторы: Бугаев, Джайлавов, Иванов, Кондратьев
МПК: G05B 23/02
...которая в общем случае по каждому шагу теста содержит три набора данных: набор данных об уровнях напряжений логических сигналов на контролируемых выводах объекта контроля, набор данных о значениях логического сигнала на контактах объекта контроля; набор данных, определяющих режим работы (вход-выход) каналов устройства на данном шаге теста, заносится в блок 4 регистров.После заполнения блока 4 регистровУВМ выдает команду, которая в дешифраторе 3 формируется в сигнал разре99 4контроле и настройке цифровых блоков различных типов,Предлагаемое изобретение позволяет 50 .существенно расширить функциональные возможности устройства, заключающиеся в расширении номенклатуры контролируемых блоков, а именно цифровых блоков, работающи в...
Предыдущий патент: Ловитель платформы подъемника для длинномерных грузов
Следующий патент: Шахтная подъемная гидротранспортная установка
Случайный патент: Сплав на основе алюминия