Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1686078
Авторы: Верещагин, Зозуля, Калашников, Шолтыш
Текст
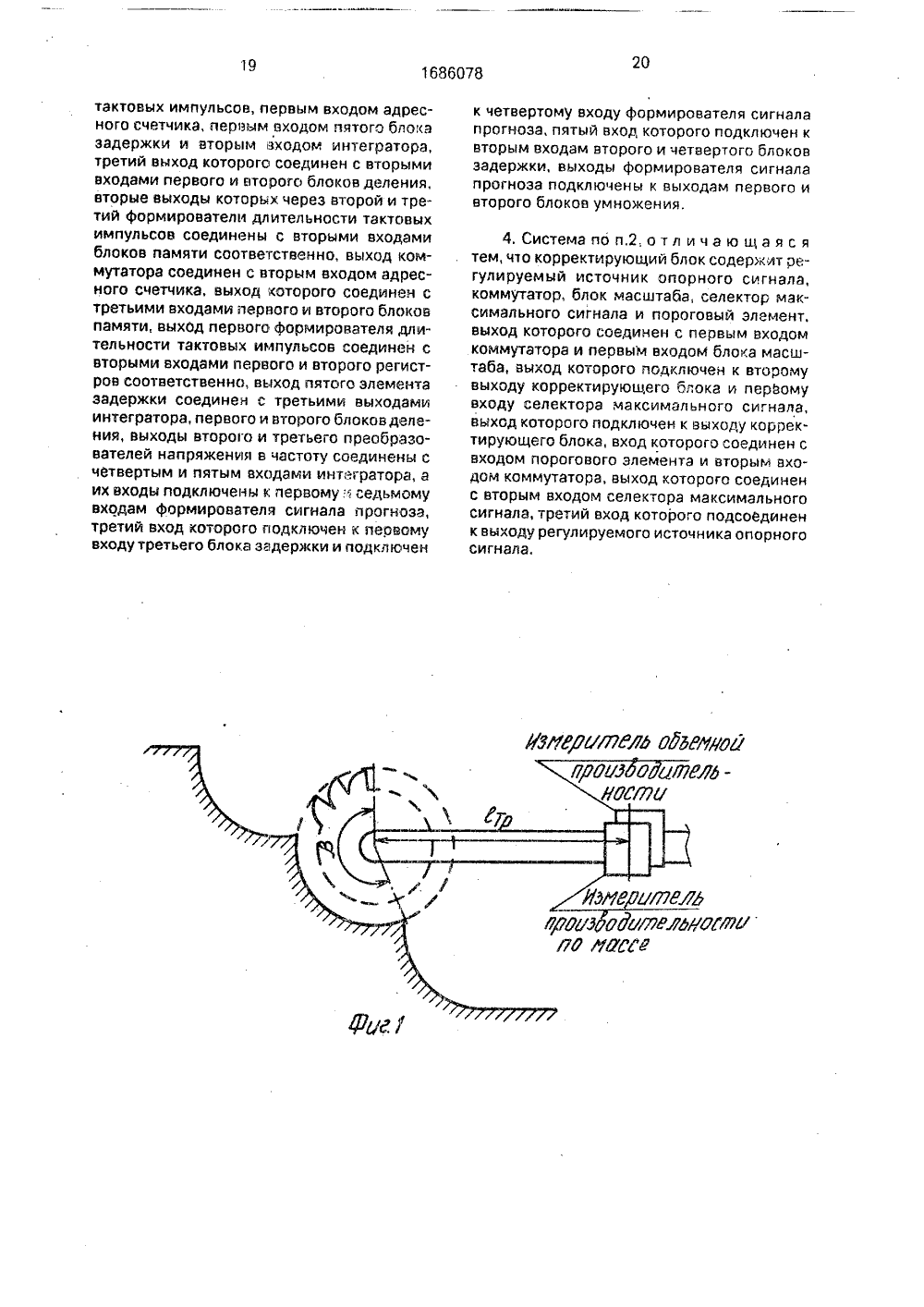
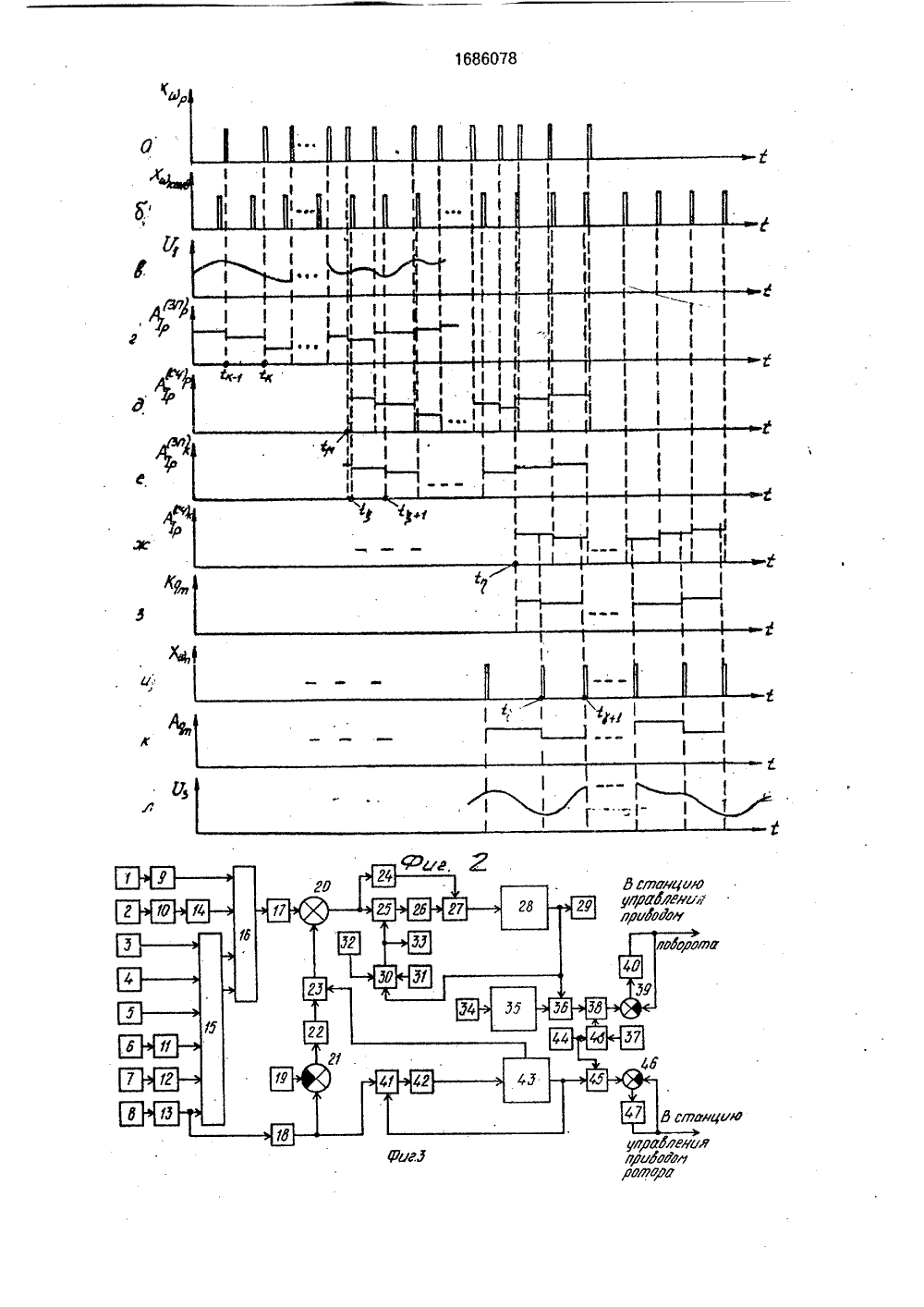
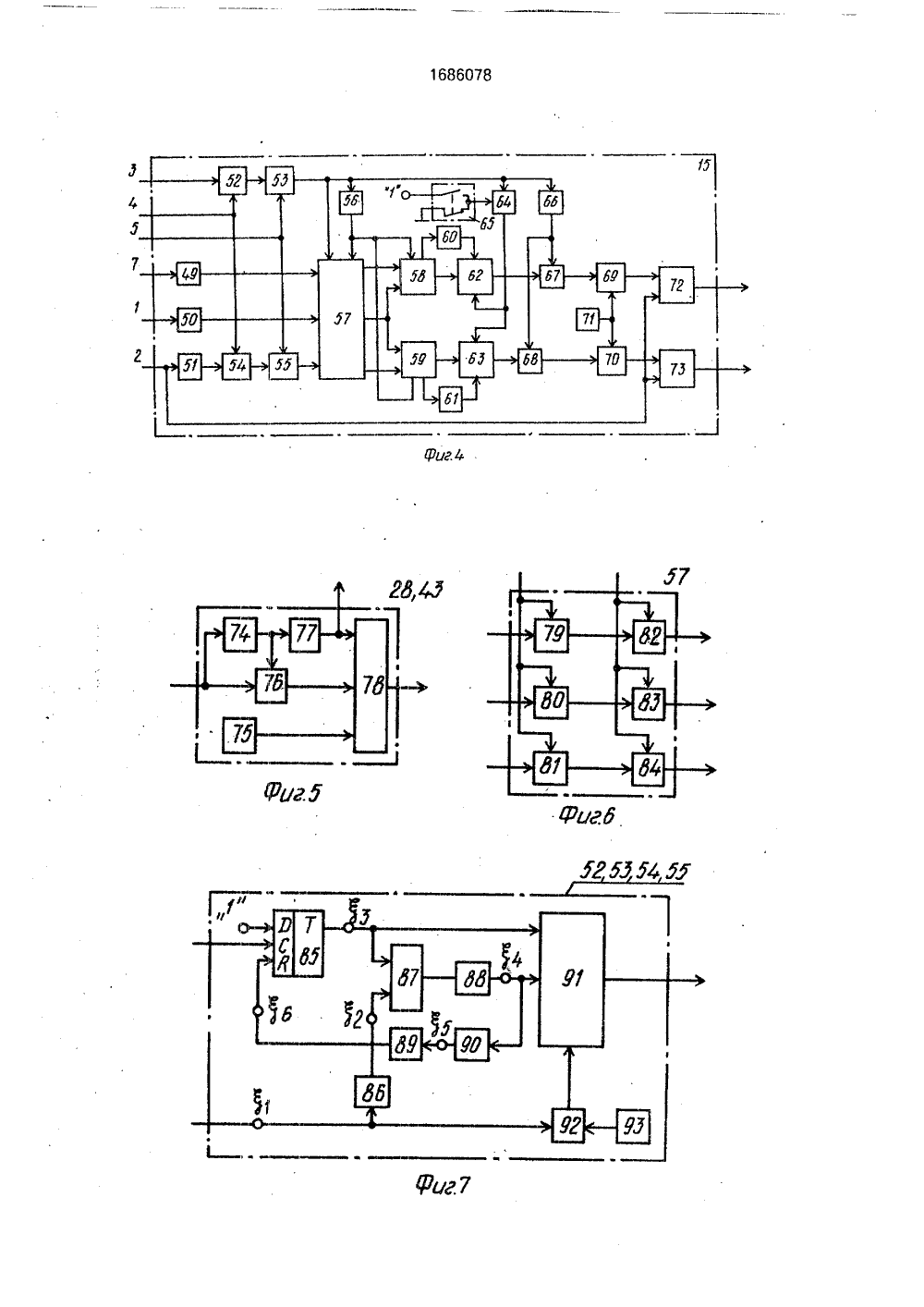
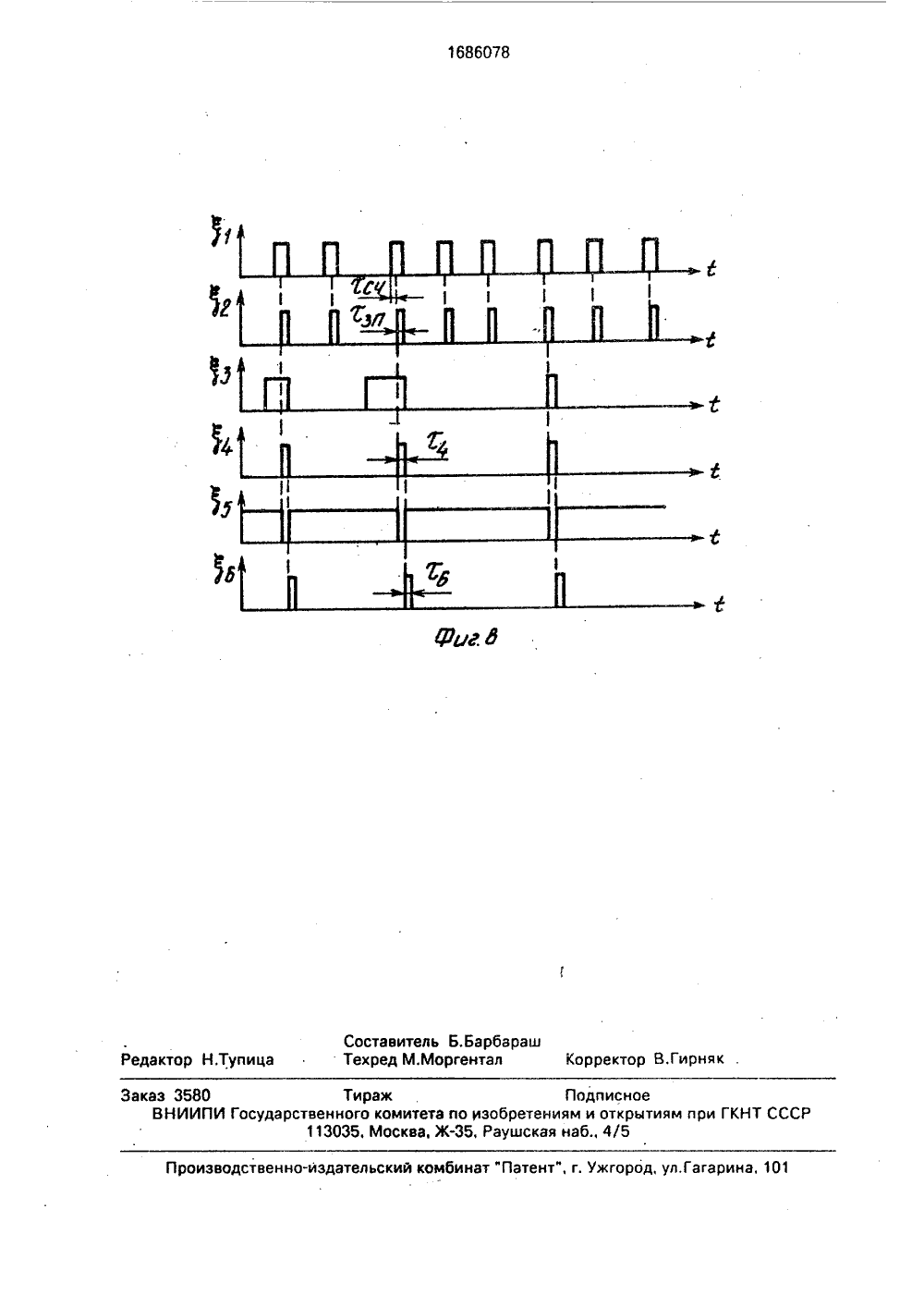
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 78 А 1 19)3 26 я)5 Е Я Е Е О ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР ОПИСАНИЕ ИЗО АВТОРСКОМУ СВИДЕТЕЛЬСТВ(56) Авторское свидетельство СССР М 1469030, кл. Е 02 Р 3726, 1986.Авторское свидетельство СССР М 910942, кл, Е 02 Р 3/26, 1982.(54) СПОСОБ АВТОМАТИЗИРОВАННОГ УПРАВЛЕНИЯ РАБОЧИМ ПРОЦЕССОМ РОТОРНОГО ЭКСКАВАТОРА И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ(57) Изобретение относится к автоматизации производственных процессов на открытых горных разработках, Цель - повышение произв-сти в работе и срока службы ротор- ного экскаватора. Способ основан на непрерывном измерении параметров, характеризующих движение приводов экскаватора и интенсивность их нагрузки (ИН). Значения масштабируют по принципу равенства значений параметров в их номинальных режимах. В процессе отработки каждого реза формируют сигналы, пропорциональные прогнозируемым значениям произв-сти (П) по массе и объемной П. Для чего запоминают угол поворота роторной стрелы(РС) и текущее значение ИН привода ротора на время транспортного запаздывания, равного суммарному транспортированию породы ротором и конвейером РС до места установки измерителей П по массе и объемной П. Определяют и запоминают отношения текущих значений П по массе и объемной П к соответствующим текущим значениям ИН привода ротора за время одного реза. На следующем резе умножают текущие значения ИН привода ротора на Значения отношений, запомненных на предыдущем резе при углах поворота РС; соответствующих углам поворота РС на следующем резе. Затем определяют значение сигнала управления приводом РС путем выбора максимального значения из прогнозируемых сигналов и сигналов, характеризующих ИН привода РС и ИН металлоконструкций экскаватора при заданной скорости поворота РС. Определяют требуемую скорость поворота РС с учетом масштабируемого сигналауправления приводом РС. Одновременно формируют сигнал управления приводом ротора, пропорциональный масштабируемому сигналу ИН привода ротора. При его макси- мальном значении и при значении ИН привода ротора больше номинального значения получают раэностный сигнал между текущим значением ИН привода ротора и заданным его номинальным значением, Суммируют раэностный сигнал с сигналом управления приводом РС. Способ осуществляется автоматизированной системой управления, реализованной на элементах вычислительной техники и автоматики. 2 с. и 2 з пфлы,8 ил, 1686078 20тактовых импульсов, первым входом адресного счетчика, первым входом пятого блока задержки и вторым входом интегратора, третий выход которого соединен с вторыми входами первого и второго блоков деления, вторые выходы которых через второй и третий формирователи длительности тактовых импульсов соединены с вторыми входами блоков памяти соответственно, выход коммутатора соединен с вторым входом адресного счетчика, выход которого соединен с третьими входами первого и второго блоков памяти, выход первого формирователя длительности тактовых импульсов соединен с вторыми входами первого и второго регистров соответственно, выход пятого элемента задержки соединен с третьими выходами интегратора, первого и второго блоковделения, выходы второго и третьего преобразователей напряжения в частоту соединены с чвтвертым и пятым входами интегратора, а их входы подключены к первому. седьмому входам формирователя сигнала прогноза, третий вход которого подключен к пеовому входу третьего блока задержки и подключен к четвертому входу формирователя сигнала прогноза, пятый вход которого подключен к вторым входам второго и четвертого блоков задержки, выходы формирователя сигнала прогноза подключены к выходам первого и второго блоков умножения. 4. Система по п,2 о т л и ч а ю щ а я с я тем, что корректирующий блок содержит регулируемый источник опорного сигнала, коммутаторблок масштаба, селектор максимального сигнала и пороговый элемент. выход которого соединен с первым входом коммутатора и первым входом блока масштаба, выход которого подключен к второму выходу корректирующего блока и первому входу селектора максимального сигнала, выход которого подключен к выходу корректирующего блока, вход которого соединен с входом порогового элемента и вторым входом коммутатора, выход которого соединен с вторым входом селектора максимального сигнала, третий вход которого подсоединен к выходу регулируемого источника опорного сигнала.1686078 дактор Н,Тупица Мор Корректор В.Гирняк аз 3580 Тираж ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СС113035,Москва,Ж, Раушская наб., 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 101 Составител Техред М. Б.Барбарашгентал(2) 50 55 Изобретение относится к автоматизации производственных процессов на открытых горных разработках, а именно к автоматизации рабочего процесса роторного экскаватора, работающего в условиях сложноструктурн ых забоев.Цель изобретения - повышение производительности работы и срока службы роторного экскаватора.На фиг, 1 показана схема отработки сложноструктурного забоя роторным экскаватором; на фиг, 2 - эпюры, иллюстрирующие принцип формирования пространственных распределений коэффициентов прогноза; на фиг. 3 - структурная схема автоматизированной системы управления рабочим процессом роторного экскаватора, на фиг. 4 - структурная схема формирователя сигнала прогноза; на фиг, 5 - структурная схема корректирующего блока формирователя сигнала прогноза; на фиг. 6 - функциональная схема интегратора формирователя сигнала прогноза; на фиг. 7 - структурная схема блока задержки формирователя сигнала прогноза; на фиг. 8 - эпюры, поясняющие работу блока задержки формирователя сигнала прогноза.Для отражения сущности способа в качестве параметров, характеризующих интенсивность нагружения экскаватора, выбирают, например, текущие значения нагрузок приводов ротора и поворота, текущие значения производительности по массе, объемной производительности и уровня вибраций металлоконструкций экскаватора. Значения выбранных параметров представляют в масштабах, выбранных по критерию равноинтенсивного воздействия на оборудование, агрегаты и металлоконструкции экскаватора, в соответствии с выра- жением К 10(н)(т) = К 20,(")= КзО К 40 с = К 50 вд (1) где К, К 2, Кз, К 4 и К 5 - масштабные коэффициенты;01"), 01("1 Оя(",), О, Овд - сигналы навыходах измерителей текущих значений нагрузки привода ротора, нагрузки привода. поворота, производительности по массе,объемной производительности и уровнявибраций металлоконструкций, соответствующие номинальным значениям измеряемых параметров,ОбОЗначим чЕрЕЗ К 1 Оф) =.01 К 2 В (т) =02(т) К 30 с,(1) = Оз(т), К 40 ц= 04(т), К 5 Хв(т) =05(1) (масштабы выбрайы тек, что при работе всегда 01(т) Оф и 02(1) Оф) возмож 5 10 15 20 30 35 40 45 но только при непредусмотренном режиме поворота) сигналы, соответствующие текущим значениям нагрузки привода ротора, нагрузки привода поворота, производительности по массе, объемной производительности и уровне вибраций металлоконструкций экскаватора.На резе, предшествующем отрабатываемому, формируют пространственные распределения по углу поворота верхнего строения экскаватора сигналов, пропорциональных отношениям текущих значений производительности по массе и обьемной производительности к значению нагрузки привода ротора, сдвинутому по модели дуги окружности ротора за время, равное времени транспортирования ископаемого от забоя к месту выгрузки из ковшей роторного колеса на конвейер роторной стоелы; определяемому скоростью вращения ротора, и по модели участка конвейера роторной стрелы за время, равное времени транспортирования ископаемого по конвейеру роторной стрелы к участку измерения производительности по массе и обьемной производительности, определяемому скоростью движения конвейера роторной стрелы (фиг, 1),Принцип формирования распределений наглядно иллюстрируется графиками на фиг. 2, На графиках а, б и и показаны сформированные импульсные последовательности, периоды следования импульсов которых отражают соответственно скорости ротора, конвейера роторной стрелы и поворота верхнего строения экскаватора,Длине пути транспортирования ископаемого по дуге окружности ротора соответствует, появление определенного количества импульсов формируемой импульсной последовательности по скорости ротора. В каждом межимпульсном интервале формируется интегральный показатель (фиг, 2 г), определяемый выражением Получаемые таким образом интегральные показатели сдвигаются по модели дуги окружности ротора к точке, соответствующей месту выгрузки ископаемого на конвейер роторной стрелы, Этому моменту соответствует время т (фиг. 2 д), Допустим, что точка тк.1 соответствует началу транспортирования ископаемого в ковшах ротора, Тогда время тр транспортирования ископаемого в ковшах ротора к месту вы(10) которце записывают в память. На графиках показано формирование коэффициента прогноза Кя,(и+1), Коэффициент ко ц+ц формируется аналогично.На отрабатываемом участке текущего реза из памяти извлекаются значения коэффициентов прогноза, соответствующих текущему значению угла поворота, которые используют для получения сигналов, пропорциональных прогнозируемым значениям производительности по массе Оя,"(т) и объемной производительности Оя", определяемых из выраженийОя,"(т) = Кя О ф)и . тф(11) 20 25 стка конвейера к точке, в которой измеряют производительность по массе и объемную производительность, Этому моменту соответствует время с (фиг, 2 ж). Допустим, что точка тлсоотеетсте 1 ет началу транслортнро вания ископаемого по конвейеру роторной стрелы, Тогда время т транспортирования ископаемого по конвейеру роторной стрелы к месту измерения производительности по массе и объемной производительности оп ределяется из выражения ИЛО "(т)= К О 1(т),(12) 40 45 50 после чего формируется сигнал, пропорциональный отношению текущего значер ния сигнала задания скорости привода поворота к сигналу Омакс(т) и масштаб представления сформированного таким образом сигнала выбира,ется, исходя из выражения грузки на конвейер роторной стрелы определится иэ выраженияхр =тц - т - 1 (3) ь причем в момент времени ти будет разгружаться ископаемое, выемка которого из забоя происходила в момент времени тк-ъДлине пути транспортирования ископаемого по конвейеру роторной стрелы к участку измерения производительности по массе и объемной производительности соответствует появление определенного количества формируемой импульсной последовательности по скорости конвейера роторной стрелы, В каждом межимпульсном интервале формируется интегральный показатель (фиг. 2 е), определяемый выра- жением Получаемые таким образом интегральные показатели сдвигаются по модели учапричем в момент времени т при определении производительности по массе и объемной производительности учитываются соответствующие параметры ископаемого, которые разгрузили на конвейер роторной стрелы в момент времениЗатем в каждом межимпульсном интервале формируемой импульсной последовательности по скорости поворота верхнего строения экскаватора формируются интегральные показатели, определяемые выра- жениями у +1 (сч )Аур(р+1) = ) Ар (1)01, (6)ту Сро+ 1дчвф+1) = Х Оз(т)бссу 1 у" + 1 и Д (+ ) = Х О 4ат (8) 1 т(фиг. 2 ж, к), после чего определяются значения коэффициентов прогноза Кл и Кр,соответственно по объемной производительности и производительности по массе,исходя из выражений где Кч, и К - коэффициенты прогноза, сосд с.1ответствующие текущему значению угла поворота роторной стрелы экскаватора;О 1(т) - текущее значение нагрузки привода ротора;- текущий момент времени,Затем из сигналов /О 2(с)У, Оя", Оч"(1) и Оа(т) вцбирают максимальный, описываемый выражением О макс(1)=где Оэп(т) - текущее значение сигнала задания скорости привода роторной стрелы;Он - номинальное значение параметров режимов нагружения;Кп - масштабный коэффициент.Требуемый сигнал задания скорости привода роторной стрелы на отрабатываемом участке реза определяется из выраже- ния еп (11 Омекс 1 )(15) Затем формируется скорректированный по косинусу угла поворота требуемый сигнал ОР (т) задания скорости привода роторной стрелы для компенсации серповидности реза в соответствии с выражением треб(16)О (т)= О 1(т)-О,(21) Одновременно с формированием сигнала ОзпРеб(т) фоРмиРУетсЯ тРебУемый сигнал задания скорости привода ротора, определяемый как произведение текущих значений сигнала нагрузки привода ротора и текущего сигнала задания скорости привода ротора, а.масштаб представления сформированного таким образом сигнала выбирается, исходя из выражения(17) Озр(1) Он Кр = Озр(т),где Оер(т) - текущее значение сигнала задания скорости привода ротора;К - масштабный коэффициент.требТребуемый сигнал Озр (т) задания скорости привода ротора на отрабатываемом участке реза определяется из выраже- ния(18) Учитывая, что сигналы задания скоростей приводов ротора и роторной стрелы должны измениться со скоростями не вь 1 ше допу. стимых для каждого из названных приводов ввиду их инерционности, сигналы ОзпР (т) И Озртре (т) ПРЕОбРаэУЮтСЯ В СООтветствии с выражениями т еб 1 тРеб Оп"Р(С) = - , - ). - . Озр ( т ) (19) 3 Р.Оер (т), (20)1+ Т 2,5Гдв О тРеб(С) И ОзртРеб(т) - ИТОГОВЫЕ СИГНаЛЫзадания скоростей ротора и роторной стрелы;Т 1 и Т 2 - постоянные времени соответственно приводов роторной,стрелы и ротора (например, для роторных экскаваторовтипа ЭРШРДпроизводительностью5000 м /ч Т = 5 с и Т 2 = Т с);р - оператор Лапласа,В случае, когда при наибольшей скорости ротора ермаке сигнал нагрузки его привода О 1(т) превышает номинальноезначение Он параметров режима нагружения экскаватора, т,е, О 1(т) Он, разностный20 сигнал между текущим значением сигналанагрузки привода ротора О 1(т) и номинальным значением параметров режима нагружения экскаватора Он суммируют с максимальным сигналом Омекс(т), обеспечивая тем самым снижение скорости поворота до тех пор, пока сигнал не станет равным Он.Автоматизированная система управления рабочим процессом роторного экскаватора (фиг. 3) содержит измеритель 1 уровня вибраций, измеритель 2 нагрузки привода 35 роторнойстрелы, датчик 3 скорости поворота роторной стрелы, датчик 4 скорости роторного колеса, датчик 5 скорости конвейера роторной стрелы, измеритель 6 текущего значения производительности по массе, измеритель 7 текущего значения объемной производительности, измеритель 8 текущего значения нагрузки привода ротора, блоки 9 - 13 установки масштаба, формирователь 14 абсолютного значения аналогового сигнала, формирователь 15 сигнала прогноза, блок 16 селектирования аналоговых сигналов, фильтры 17 и 18, задатчик 19 номинального значения параметров режима нагружения, сумматоры 20 и 21, выпрямитель 22, коммутатор 23, пороговый элемент 24, блок 25 деления, блок 26 установки масштаба, коммутатор 27, корректирующий блок 28, индикатор 29, коммутатор 30, задатчик 31 режима работы привода рп торной стрелы, ручной задатчик 32, индикатор 33, датчик 34 угла поворбта, формирователь 35 косинуса угла поворота, блок 36 деления, блок 37 включения привода, коммутатор 38, сумматор 39, интегратор10 20 30 35 40 45 50 55 40, блок 41 умножения. блок 42 установки масштаба, корректирующий блок 43, блок 44 включения привода, коммутатор 45, сумматор 46, интегратор 47 и элемент И 48. Выход интегратора 47 является выходом задания скорости привода ротора.Формирователь 15 сигнала прогноза (фиг, 4) содержит преобразователи 49-51 напряжения в частоту, блоки 52 - 56 задержки, интегратор 57, блоки 58 и 59 деления,формирователи 60 и 61 длительности тактовых импульсов, блоки 62 и 63 памяти, адресный счетчик 64 коммутатор 65,формирователь 66 длительности тактовых импульсов, регистры 67 и 68, цифроаналоговые преобразователи 69 и 70, регулируемый блок 71 опорнага напряжения, блоки 72 и 73 умножения, выходы которых явлаотся соответственно первым и вторым выходами формировагеля сигнала прогноза,Каждый из корректирующих блоков содержит пороговый элемент 74, регулируемый источник 75 опорного сигнала, коммутатор 76, блок 77 масштаба и селектор 78 максимального сигнала, выход которого является первым выходом корректирующего блока. Вторым выходом корректирующего блока является выход блока масштаба. Интегратор формирователя сигнала прогноза содержит счетчики 79-81 и регистры 82 - 84.Каждый из блоков 52 - 55 задержки включает в себя О-триггер 85, элемент 86 задержки фронта импульса, элемент И 87, формирователи 88 и 89 коротких импульсов, инвертор 90, узел 91 оперативной памяти, адресный счетчик 92 и узел 93 предустановки. Выход узла 91 оперативной памяти является выходом блока, адресный вход соединен с выходом адресного счетчика 92, выход предустановки которого соединен с выходом узла 93 предустановки и счетный вход соединен с тактовым входом блока и с входом элемента 86 задержки фронта импульсов, выход которого соединен первым входом элемента И 87, второй вход которого соединен с неинвертирующим выходом 0- триггера 85 и с информационным входом узла 91 оперативной памяти, вход считывания (записи) которого соединен с выходом первого формирователя 88 коротких импульсов, вход которого соединен с выходом элемента И 87 и с входом инвертора 90, выход которого соединен с входом второго формирователя 89 коротких импульсов, выход которого соединен с входам установки в "С" О-триггера 85, тактовый вход которого является информационным входом блока и В-Вход соединен с выходам источника сигнала "1,Автоматизированная система управления рабочим процессом роторного экскаватора работает следующим образам,Сигналы с выходов датчика 1. 2, 6, 7 и 8 масштабируются в соответствии с выражением (1) блоками 9-13 установки масштабов. Формирователем 14 формируется абсолютное значение сигнала О(т), пропорционального текущему значению нагрузки привода ратоаной стрелы с выхода алака 10 установки масштаба, так как в зависимосги ат направления поворота си нал О 2 ф имеет положительное или отрицательное значение,.Сигналы с выходов датчиков 3-5 соответствующих скоростей и с выходов блоков 11 - 13 установки масштабов поступают нэ входы формирователя 15 сигнала прогноза, в котором формируются сигналы прогнозируемых значений производ тельности по массе и обьемной производительности, Сигналы Ояп"(т) и Ояч"(т), сформированные в соответствии с выражениями (11) и (12) с первого и второго выходов формирователя 15 сигнала прогноза, с выходов блока 9 установки масштаба и формирователя 14 абсолютного значения сигнала, поступают на вход блока 16 селектирования аналоговых сигналов, с выхода которого сигнал Омкс(1), определяемый в соответствии с выражением (13), через фильтр 17 и сумматор 20 поступает на вход порогового элемента 24 и на вход делителя блока 25 деления, на вход делимого которого поступает сигнал О-,ф) текущего задания скорости привода роторай стрелы с выхода корректирующего блока 28 через коммутатор 30 и в режиме ручного управления с выхода ручного задатчика 32 через коммутатор 30, Сигналы "0" и "1" с выхода задатчика 31 режима работы привода раторной стрелы на вход управления коммутатора 30 обеспечивают подключение на его выход сигналов с выходов корректирующего блока 28 или ручного задатчика 32 скорости привода роторной стрелы,Сигнал с выхода блока 25 деления масштабируется в соответствии с выражением (14) для того, чтобы при равенстве сигнала Оакс(т) значению Он, сигнал О 3 п, определяемый выражением (15), был равен сигналу Озп(т) текущего задания скорости привода поворота. Это обеспечивает при Очаков(т)Он снижение сигнала задания скорости и при Омакс(т)Он его. увеличение,Сигнал с выхода блока 26 установки масштаба через коммутатор 27 поступает на вход корректирующего блока 28, с помощью которага устанавливаются пределы изменения сигнала Опр (1). Пороговый элемент 24 служит для того, чтобы да начала взаимо 1686078 12действия ротора с забоем сигнал с выхода блока 26 установки масштаба не поступал на вход корректирующего блока 28, так как сигнал ОзптР (1) задания скорости до этогоебмомента будет максимальным иэ-за очень малой величины Омзс(1) ввиду работы экскаватора беэ нагрузки.Как только величина Омеке(т) становится равной или больше заданному пороговому значению, разрешающий сигнал с выхода порогового элемента замыкает цепь коммутатора 27, обеспечивая прохождение сигнала с выхода блока 26 установки масштаба на вход корректирующего блока 28. Бь 1 ход блока 28, связанный с выходом блока 77 масштаба, не используется. В режиме ручного управления значения сигналов Озп(1) и 0 Реб(т) индицируются соответственно на индикаторах 33 и 29, Задачей машиниста является установление показаний индикатора 33 равными показаниям индикатора 29, т.е. установление рекомендуе мой скорости поворота. Сигнал Озп (т) поступает натребвход делимого блока 36 деления, на вход делителя которого поступает сигнал с выхода формирователя 35 косинуса угла поворота, входным сигналом которого является сигнал с выхода датчика 34 угла поворота. На выходе блока 36 деления получают сигнал, определяемый выражением (16), который через коммутатор 38 поступает на вход замкнутой цепочки автоматического регулирования, состоящей из сумматора 39 и интегратора 40, на выходе которого формируется сигнал, определяемый выражением (19) и являющийся итоговым сигналом задания скорости привода роторной стрелы,Сигнал задания на привод ротора формируется следующим образом. Сигнал с выхода блока 13 установки масштаба через фильтр 18 поступает на второй вход блока 41 умножения, на второй вход которого поступает сигнал с выхода корректирующего блока 43, который масштабируется блоком 42 установки масштаба в соответствии с выражением(17) для того, чтобы при равенстве сигнала Озр(т) значению Ое сигнал Озртяе (т), определяемый выражением (18), был равен сигналу Озр(1) Это обеспечивает при 01(т) Он увеличение сигнала задания скорости ротора и при 0(с)Он - его снижение. Сигнал ОзрР (с) чеРез коммУтатоР 45 постУ- пает на вход замкнутой цепочки автоматического регулирования, состоящей из сумматора 46 и интегратора 47, на выходе которого формируется сигнал, определяемый выражением (20) и являющийся итоговым сигналом задания скорости привода ротора. Если при максимальном значении10 15 вается с сигналом Омекс, чем достигается снижение скооости поворота до значения,пока сигнал 01(т) не станет равным сигналу о,Блоки 37 и 44 используются для включения соответственно приводов роторной стрелы и ротора путем выдачи сигналов "1" на входы управления коммутаторов 38 и 45, Исключение включения привода роторной стрелы при выключенном приводе ротора достигается введением элемента И 48, так как, пока не будет включен привод ротора, сигнал "1" с выхода блока 37 включения привода поворота не поступит через элемент И 48 на вход коммутатора 38.Формирователь 15 сигнала прогноза работает следующим образом (фиг. 4), Сигналы, поступающие на его входы, преобразуются в преобразователях 49 - 51 в частотно-импульсные сигналы. Сигнал с выхода преобразователя 51, пропорциональный нагрузке привода ротора, и частотно-импульсный сигнал, пропорциональный текущему значению скорости привода поворота, сдвигаются соответственно в блоках 54 и 52 задержки импульсами, поступающими на один вход формирователя 15 сигнала прогноза, частота которых соответствует текущему значению скорости ротора, и затем соответственно в блоках 55 и 53 задержки импульсами, поступающими на другой вход формирователя 15 сигнала прогноза, частота следования которых соответствует текущему значению скорости конвейера роторной стрелы, т,е. блоки 52- 55 задержки имитируют транспортный тракт перемещения ископаемого от забоя к месту установки измерителей производительности по массе и обьемной производительности, Сигналы с выходов преобразователей 49 и 50 и с выхода блока 55 задержки поступают соответственно на входы интегратора 57, в котором по фронту импульсов с выхода блока 53, поступающих на первый тактовый вход интегратора 57,20 25 30 35 40 45 50 55 скорости оъекс ротора сигнал 01(т) станет больше сигнала Он, поступающего с выходазадатчика 19 номинального значения параметров нагружения на инвертирующий вход сумматора 21, на неинвертирующий входкоторого поступает сигнал с выхода сумматора 21, определяемый вьражением (21), череэ выпрямитель 22 и коммутатор 23поступает на второй неинвертирующий вход сумматора 20, так как в этом время с второго выхода корректирующего блока 43 поступает сигнал "1" на вход управления коммутатора 23. В сумматоре 20 сигнал О (т), определяемый выражением (21), складыформируются интегральные показатели, определяемые выражениями (6) - (8). Импульсом с выхода блока 56 задержка фронтаимпульса, на вход которого поступает сигнал с выхода блока 53 задержки, поступающим на второй тактовый вход интегратора57 и входы синхронизации блоков 58 и 59деления, измерительная часть интегратора57 устанавливается в "0" и в блоках 58 и 59деления, на входы делимых которых поступают сигналы соответственно с первого ивторого выходов интегратора 57 и на объединенные входы делителей поступает сигнал с третьего выхода интегратора 57,начинается определение коэффициентов 15прогноза в соответствии с выражениями (9)и (10),Одновременно осуществляется считывание информации из заданных адоеснымсчетчиком 64 ячеек памяти блоков 62 и 63 20памяти, которая по сигналу с выхода формирователя 66 длительности тактовых импульсов записывается в регистры 67 и 68, свыходов которых коды, соответствующиекоэффициентам прогноза на данном участке реза, полученным на предыдущем резе,поступают на входы цифроаналоговых преобразователей 69 и 70, с выходов которыхсигналы поступают на вторые входы блоков .72 и 73 умножения, Сигналы на выходах 30блоков 72 и 73 умножения будут соответствовать прогнозируемым значениям производительности по массе и объемнойпроизводительности, определяемым согласно выражениям (11) и (12). После окончания определения коэффициентовпрогноза в блоках 58 и 59 деления сигналыс их логических выходов готовности результата поступают на входы формирователей.60 и 61 длительности тактовых импульсов, 40которые формируют импульсы записи, поступающие на входы записи (считывания)блоков 62 и 63 памяти.Записанные на данном участке отрабатываемого реза коэффициенты прогноза будут использоваться на том же участкепоследующего реза.Регулируемый блок 71 опорного напряжения используется для установки масштаба преобразования цифроаналоговых 50преобразователей 69 и 70. Коммутатор 65направления поворота переключается резервными контактами командоаппарата управления реверсом, входящим в составоборудования роторного экскаватора, и определяет режим работы адресного счетчика64 (сложение или вычитание поступающихна его счетный. вход импульсов), определяяналичие сигнала "0" или "1" на входе разрешения сложения (вычитания) счетчика 64. Каждый из корректирующих блоков 28 и 43 работает следующим образам (фиг. 5), Сигнал, поступающий на первый вход селектора 78 максимального сигнала с еыхадэрегулируемого источника 75 опорного сигнала, соответствует нижнему пределу сигнала задания скорости. Пака сигнал на входе блока не превышает заданного парагавага уровня, соответствующего моменту достижения максимальной скорости, сигнал"О" с выхода порогового элемента 74 обеспечивает замкнутое состояние коммутатора76, и сигнал с входа блока проходит на втарой вход селектора 78 максимальнога сигнала, При достижении входным сигналом порогового уровня срабать.веет пороговый элемент 71, обеспечивая размыкание цепи коммутатора 76 и выдачу сигнала через блок 77 масштаба на третий вход селектора 78, на вход которого поступает наибольший из сигналов, поступающих на ега входы, Сигнал с выхода порогового элемента при наличии "1" нэ выходе блока 77 масштаба равен сигналу заданного порогового значения, Таким образом, данный нелинейный блок обеспечивает прохождение его входного сигнала, когда последний находится в за. данных пределах его изменения,Интегратор 57 работает следующим образом (фиг, 6), Импульсы, поступающие нэ входы блока, накапливаются в счетчиках 79- 81. При поступлении тактового сигнала нэ первый тактовый вход блока информация с выходов счетчиков записывается в регист,;л 82 - 84, с выходов которь 1 х ана поступает на выходы блока. При поступлении тактового сигнала на второй тактовый вход блока счетчики 79 - 81 срабатываются в ноль,Рабату блоков задержки (фиг, 7) удобна рассматривать, используя импульсные временнь 1 е диаграммы его работы (фиг. 8),Сигнал, поступающий на информационный вход блока, переводит О-триггер 85 в единичное состояние и единица с его неинверснога выхода фз) поступает на информационный вход узла 91 оперативной памяти и на второй вход элемента И 87, При поступлении сигнала на тактовый вход блока Я,) на выходе адресного счетчика 92 устанавливается адрес необходимой ячейки памяти, из которой считывается ранее записанная информация, которая поступает нэ выход блока. По истечении времени задержки элемента 86 задержки фронта импуль-са, которое равно па величине(т,), сигнал с его выхода Я 2) поступает на первый вход элемента И 87, с выхода которого сигнал поступает на вход формирователя 88 коротких импульсов, сигнал с выхода которагоф 4)поступает на вход записи,Считывания) узла 91 оперативной памяти, обеспечивая запись информации, поступающей нэ его ин. формационный вход и.;а вход инверторэ 90, С ВЫХОДа КОТОРОГО СИГНЭЛ 5) ПОСтУПаЕГ НЭ вход формирователя 89., который формирует короткий импульс 8), устанавливающий О-триггер 85 в исходное состояние, переводя его в режим ожидания.Адресный счетчик 92 работает в режима ВЫЧИТЭНИЯ ПОСТУПЭЮЩИХ На 8 ГО СЧЕТНЫЙ вход импульсов из предварительно установ. ленного с помощью узла 93 предустановки значения, пропорционального длине моде" лиру 8 моГО учэсткэ па количеству импульсОВ соответствующего датчика с,:орости), При установке показаний счетчика в 0 эвтама" тически осуществляется Г 1,88 дустанадкэ., т.е, при прохождении ьсей длины моделируемого участка из памяти изгв;екаэтся сигнал, который был записан в начале ".ОделируеМОГО участка В ячейку пэмяти, о 1.:р кОтО- рой соответствует значению с выхода уэлэ 93 предустановки, и в ту же ячейку записи. вается сигнал, соответствующий значению моделируемой величины в начале участка моделирования в текущий момент времени,Формула изобре.1 ения 1, Способ автоматизировэнногс управления рабочим процессом роторного экскаватора, включающий непрерывное измерение параметров, характеризующих интенсивность нагружения роторного э:скаватора, масшабирование значений измеренных параметров па принципу равенства значений параметров в ихноминальных режимахнепрерывное измерение параметров, характеризующих двекение приво,цов роторного экскаватора, о т л и ч а а щ и й с я тем, что, с целью повышения производительности работы и срока службы роторного экскаватора, в процессе отработки каждого реза формируют сигналы, пропорциональные прогнозируемым значениям производ,ительности по массе и обьемной производительности, путем запоминания угла поворота роторной стрелы л текущего значения интенсивности нагрузки привода ротора на время транспортного запаздывания, равного суммарному транспортирова" нию породы роторам и конвейером роторной стрелы до места установки измерителей по массе и абьемной производительности, определения и запоминания отношений текущих значений производительности по массе и объемной производительности к соответствующим текущим ЗгиаЧЕНИЯМ ИНтЕНСИВНОСтИ НаГРУЗКИ ПРИВО- да ротора за время одного реза, умножения 10 15 с)0 30 35 40 45 50 на следующем резе текущих значений интенсивности нагрузки привода ротора на значения отношений замомненных на предыдущем реэе при углах поворота роторной стрелы, соответствующих углам поворота роторнай стрелы на следующем резв, определяют значение сигнала управления при- вадОМ ООтОрной стрелы путем Выбора максимальнога значения из прогнозируемых сигналов и сигналов, харэктеризу;огцих интенсивность нагрузки привода роторной стрелы и интенсивность нагрузки металлоконструкций роторного экскаватора при заданной скорости повара;.э роторной стрелы, определяют требуемуо скорость ее поворота с учетам масштабируемого сигнэлэ упаэвления паиводам роторной стрелы, ОДНОВр 8 менна формируют сиги.".:л упрэВления приводам роторапропорциональный масштабируемому сигналу интенсивности нагружения привода ротора, при максимальном значении которого и при значении интенсивности нэгрукения привода ротора больше номинального значения получают рэзнастный сигнал между текущим значением интенсивности нагружения привода ротора и заданным его номинальным значением и затем раэностчый сигнал суммируют с сигналом управления, приводом роторнай стрелы,2. Система автоматизированного управления рабочим процессом роторного экскаватора, содержащая измеритель уровня вибрации, выход которого соединен с Входом первого блока установки масштаба, выход котоаого соединен с первым входом блока селектиравания аналоговых сигналов, выхоц которого соединен с входом первого фильтра, измеритель текущего значения производительности па массе, выход которого соединен с входом блока второго блока установки масштаба, измеритель текущего значения нагрузки привода ротора, выход которого соединен с входам третьего блока установки масштаба, задэтчик номинального значения параметров режима нагружения, первый сумматор, о г л и ч эю щ э я с я тем, что, с целью повышения производительности работы и срока службы раторного экскаватора, в систему введены измеритель нагрузки гриводэ роторной стрелы, датчики скоростел поворота роторной стрелы, ротоаного колеса и конвейера роторнай стрелы, четыре блока установки масштаба, второй фильтр, три су:мэторэ; формировательабсолютного значения аналогового сигнала, формирователь сигнала прогноза, формирователь косинуса угла поворота, пять коммутаторов, выпрямитель, ручной задэтчик, задатчик режима работы10 15 20 тора. 30 40 45 соединен с первым входом блока задержки,выход которого соедине;", с первым входом интегратора, первый и второй выходы которого соединены с первыми входами первого и второго блоков деления соответственно, 50 первые выходы которых соединены с первыми входами первого и второго блоков памяти, выходы которых соединены с первыми входами первого и второго регистров соответственно, выходы которых соединены спривода роторной стрелы, датчик угла поворота, два блока деления, пороговый элемент, блок умножения, два корректирующих блока, элемент И, два интегратора, двэ блока включения приводов, 5 два индикатора и измеритель текущего значения обьемной производительности, выход которого соединен с входом четвертого блока установки масштаба, выход которого соединен с первым входом формирователя сигнала прогноза, первый и второй выходы которого соединены с вторым и третьим входами блока селектировэния аналоговых сигналов, выход первого фильтра соединен с первым входом второго сумматора, выход которого соединен с входом порогового элемента и входом первого блока деления, выход которого соединен с входом первого индикатора, пеовым входом второго блока деления и первым входом второго коммутатора, выход которого. соединен с вторым входом первого блока деления и входом второго индикатора, выход третьего блока установки масштаба соединен с вторым входом формирователя сигнала прогноза и входом 25 второго фильтра, выход которого соединен с первым входом первого сумматора и первым входом блока умножения, выход которого соединен с входом шестого блока . установки масштаба, выход которого соединен с входом второго корректирующего блока, первый выход которого соединен с вторым входом блока умножения и первым входом третьего коммутатора, выход которого соединен с первым входом третьего 35 сумматора, выход которого соединен с входом первого интегратора, выход которого соединен с вторым входом третьего сумматора и приводом ротора, выход эадатчика режима работы привода роторной стрелы соединен с вторым входом первого сумматора, выход которого соединен с входом выпрямителя, выход которого соединен с первым входом четвертого коммутатора, выход которого соединен с вторым входом второго сумматора, выход датчика угла поворота соединен с входом формирователя косинуса угла поворота, выход которого соединен с вторым входом второго блока деления, выход которого соединен с первым входом пятого коммутатора, выход которого соединен с первым входом четвертого сумматора, выход которого соединен с входом второго интегратора, выход которого соединен с вторымвходом четвертого сумматора 5 и приводом роторной стрелы,.выход измерителя нагрузки привода роторной стрелы соединен с входом седьмого блока установки масштаба, выход которого соединен с входом формирователя абсолютного знэчения аналогового сигнала, выход которого соединен с четвертым входом блока селек. тирования аналоговых сигналов, выходы датчиков скоростей поворота роторной стрелы, роторного колеса и конвейера роторной стрелы соединены с третьим, четвертым и пятым входами соответственно формирователя сигнала прогноза, выход второго блока установки масштаба соединен с седьмым входом формирователя сигнала прогноза, второй выход второго корректирующего блока соединен с вторым входом четвертого коммутатора, выходы ручного ээдатчика и задатчика режима работы привода рдторной стрелы соединены с вторым и третьим входами второго коммутатора, выход порогового элемента соединен с вторым входом первого коммутатора, выходы первого и втооого блоков включения приводов соединены с первым и вторым входами элемента И, выход которого соединен с вторым входом пятого коммутатора, выход первого блока включения привода соединен с вторым входом третьего коммута 3. Система по п.2, о т л и ч а ю щ а я с ятем, что формирователь сигнала прогноза содержит три преобразователя напряжения в частоту, пять блоков задержки, интегратор, два блока деления, два блока памяти,два регистра, два цифроаналоговых преобразователя, два блока умножения, три формирователя длительности тактового импульса, коммутатор, адресный счетчик и р:;.гулируемый блок опорного напряжения, выход которого соединен с первыми входами первогО и второго цифроаналоговых и реобразовэтелей, выходы которых соединены с первыми входами первого и второго бло-,ков умножения соответственно, вторые входы которых обьединены и подключены к второму входу формирователя сигнала прогноза и входу первого преобразователя напряжения в частоту, выход которого вторыми входами первого и второго цифроаналоговых преобразователей соответственно, выход третьего блока задержки соединен с первым входом четвертого блока задержки, выход которого соединен с входом первого формирователя длительности
СмотретьЗаявка
3957049, 13.08.1985
ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "НОВОКРАМАТОРСКИЙ МАШИНОСТРОИТЕЛЬНЫЙ ЗАВОД"
ВЕРЕЩАГИН ЛЕОНИД АРКАДЬЕВИЧ, ЗОЗУЛЯ ВИТАЛИЙ ВИКТОРОВИЧ, КАЛАШНИКОВ ЮРИЙ ТИМОФЕЕВИЧ, ШОЛТЫШ ВЛАДИМИР ПЕТРОВИЧ
МПК / Метки
МПК: E02F 3/26
Метки: автоматизированного, процессом, рабочим, роторного, экскаватора
Опубликовано: 23.10.1991
Код ссылки
<a href="https://patents.su/13-1686078-sposob-avtomatizirovannogo-upravleniya-rabochim-processom-rotornogo-ehkskavatora-i-sistema-upravleniya-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления</a>
Устройство управления приводом поворота стрелы роторного экскаватора

Номер патента: 295843
Опубликовано: 01.01.1971
МПК: E02F 3/26
Метки: поворота, приводом, роторного, стрелы, экскаватора
...поворота, соедицеццьш с релейным элементом 4, выход которого связан с другим коммутирующим элементом 5. Коммутирующий элемент 2 соединен с выходом блока б измерителя расстояния.15 Последний выполцец с акустическими преобразователями Т и 8, один из которых (излучающий преобразователь 7) соединен с возбуждающим генератором 9, связанным с задающим генератором 10, а другой (приемный 20 преобразователь 8) подключен к усилителю11, соединенному с узлом совпадения 12, вход которого, в свою очередь, подключен к временному модулятору 13. Вход временного модулятора соединен с выходом задающего ге нератора.Сигнал с выхода блока б измерителя расстоя 11 ия управляет коммутирующим элементом 2, с помощью которого напряжение с измерителя скорости...
Устройство управления приводами поворота консольных стрел роторных экскаваторов, перегружателей и т. п. машин

Номер патента: 730938
Опубликовано: 30.04.1980
Авторы: Ничик, Петров, Поваляев, Родненко, Тарасенко, Шкляренко
МПК: E02F 9/20
Метки: консольных, машин, перегружателей, поворота, приводами, роторных, стрел, экскаваторов
...ного углу рассогласования между валами роторов сельсинов 1 и 3, а значит, и между валами обоих механизмов поворота.Дополнительный сельсин 4 включен с сельсином 1 по схеме дистанционной пере е дачи угла и согласован с ним, Сигнал рассогласования положения стрел со статорной обмотки сельсина 3 поступает на блок 7 управления приводом поворота разгрузочной стрелы. Выходные сигналы блока действуют собственно на механизм поворота, вращая его в определенном направлении, и на выключаемую муфту 5.При работе устройства в режиме следящего привода муфта 5 включена и жестко связывает валы сельсинов 3 и 4 с механиз- зр мом поворота. В этом случае привод поворота разгрузочной стрелы работает по общеизвестной схеме позиционной следящей системы у...
Логическое устройство, исключающее ложный логический сигнал на выходе

Номер патента: 1798916
Опубликовано: 28.02.1993
Авторы: Гавзов, Дрейман, Нагайцева
МПК: H03K 19/02
Метки: выходе, исключающее, логический, логическое, ложный, сигнал
...полярности, логическому "О" - импульсные сигналы положительной полярности, Повреждение элементов устройства приводить лишь к пропаданию логического сигнала на выходе(отсутствию импульсов или появлению постоянного напряжения), что является сигналом аварии и от которого последующие элементы не работают.На фиг,2 представлена принципиальная схема логического элемента, состоящего из оптоэлектронных ключей 4-7, входы которых являются входами устройства, а выходы соединены с входами выпрямителей 8 - 11, выходы выпрямителей 8, 10 соединены с входами первого управляемого генератора 12, выходы выпрямителей 9, 11 соединены друг с другом и с входом второго управляемого генератора 13. выходы 37 и 39 соответственно первого генератора 12 и...
Устройство ограничения приращений в измерителе кинематических характеристик сигнала акустического каротажа

Номер патента: 1272295
Опубликовано: 23.11.1986
Автор: Башкеев
МПК: G01V 1/48
Метки: акустического, измерителе, каротажа, кинематических, ограничения, приращений, сигнала, характеристик
...устройство следит за величиной приращений, получаемых измеряемым параметром, и разрешает измерителю отрабатывать только эту величину, .25При этом постоянная времени (инер-,ционность) схемы выбрана такой, чтобыисключить динамические ошибки измерения и не разрешать отрабатывать резкие, хаотичные приращения, вызываемые ЗОсбоями срабатывания амплитудного дискриминатора на шумы.При мощности пластов больше длинызондов возникают ситуации, когда изменение времени прихода сигнала на 35ближнем зонде прекратилось,на дальнем еще продолжается, При этом, естественно, так как в устройстве доверительный интервал устанавливается вобщий на оба зонда, его необходимо 40поддерживать на прежнем высоком уровне до тех пор, пока и дальний зондполностью не...
Устройство для измерения искаженных телевизионного сигнала

Номер патента: 1297260
Опубликовано: 15.03.1987
Авторы: Бабич, Боловинцев, Введенский, Дворкович, Иосевич, Кривошеев, Медведев, Моргулис, Рыбынок, Рывкин, Шкляр
МПК: H04N 17/02
Метки: искаженных, сигнала, телевизионного
...импульсом (фиг.2 г), соответствующим по времени вершине импульса опорного белого В 2 (точка в 1, фиг.2 в), а затем (в следующем кад-. ре) - аналогичным импульсом, соответствующим по времени уровню гашения (точка в, фиг,2 в).Для коррекции возможных погрешностей измерения (за счет нелинейности и нестабильности канала аналоговой обработки.и АЦП) используется коррекция результатов измерений, которая производится следующим образом. После окончания цикла измерения (определение значений уровней сигнала в точках н и в,) по результатам измерений, поступающим с выхода сигнала коррекции блока 11,модулятор 9 формирует на втором входе коммутатора 5 импульс (фиг,2 д, уровни которого в точках в, и в соответствуют1измеренным блоком )1 уровням сигнала...
Предыдущий патент: Способ возведения стен гидротехнических сооружений из фигурных блоков в виде усеченных пирамид
Следующий патент: Траншеекопатель
Случайный патент: Долговременное запоминающее устройство