Способ определения динамических петель гистерезиса ферромагнитных материалов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
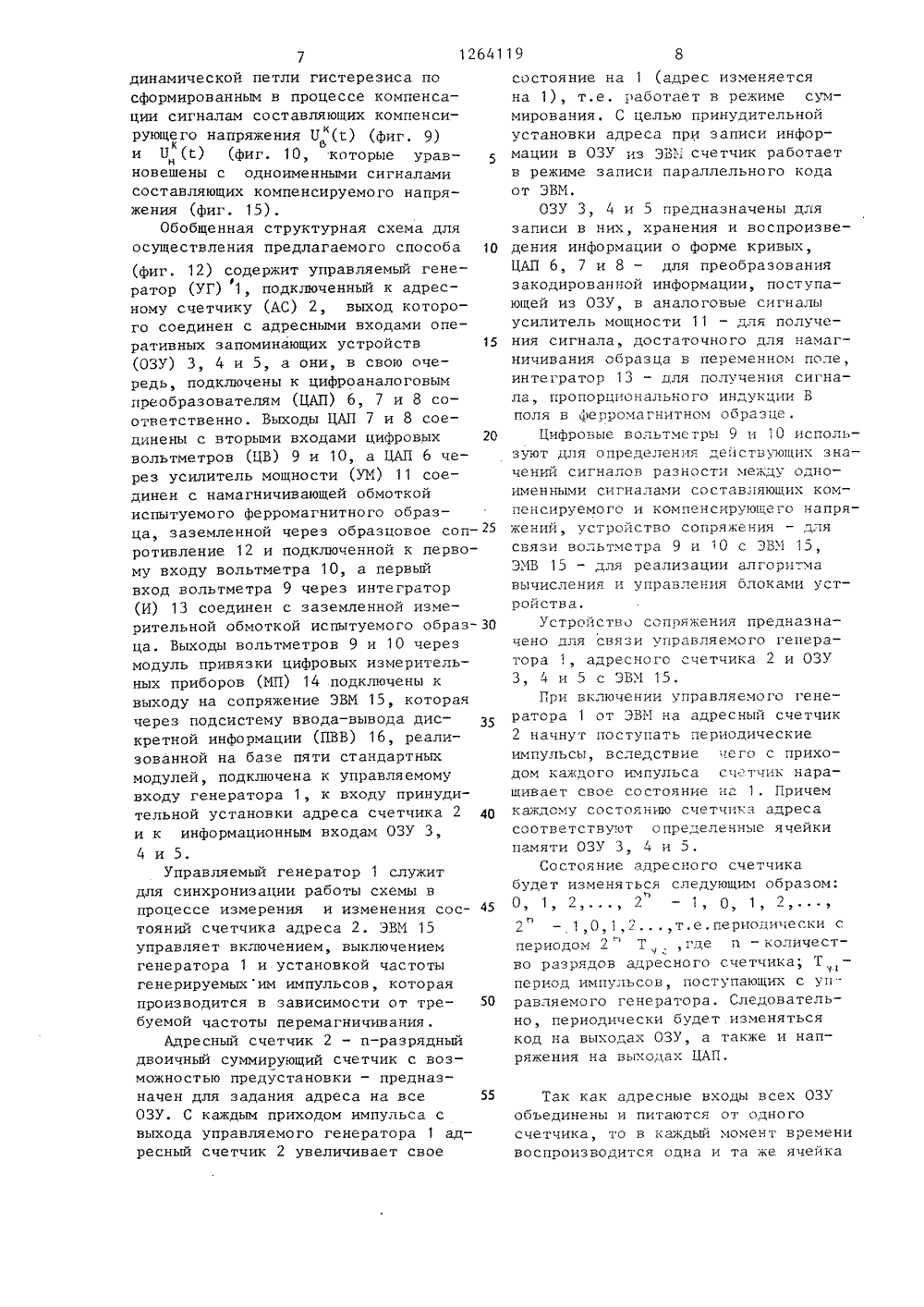
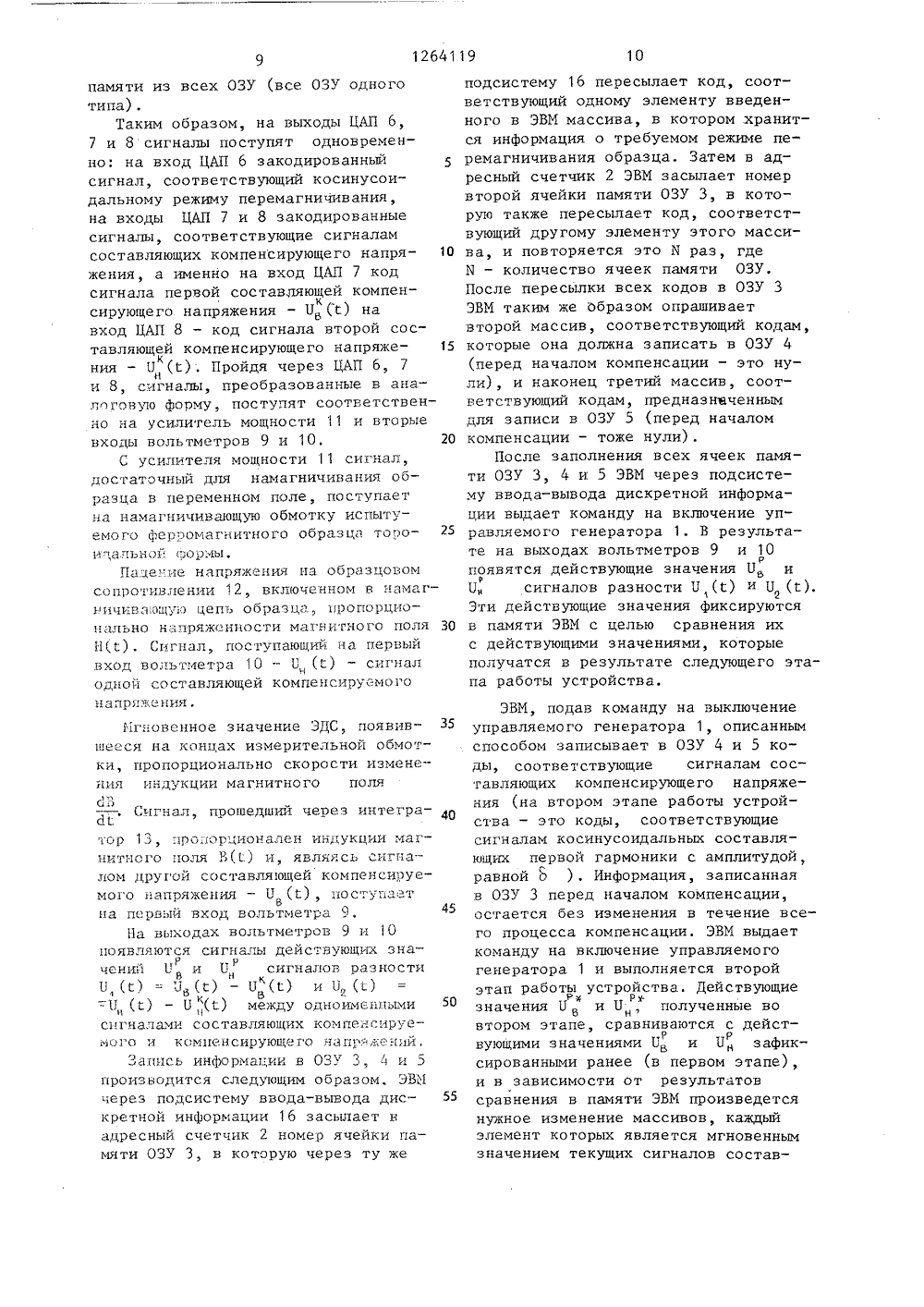
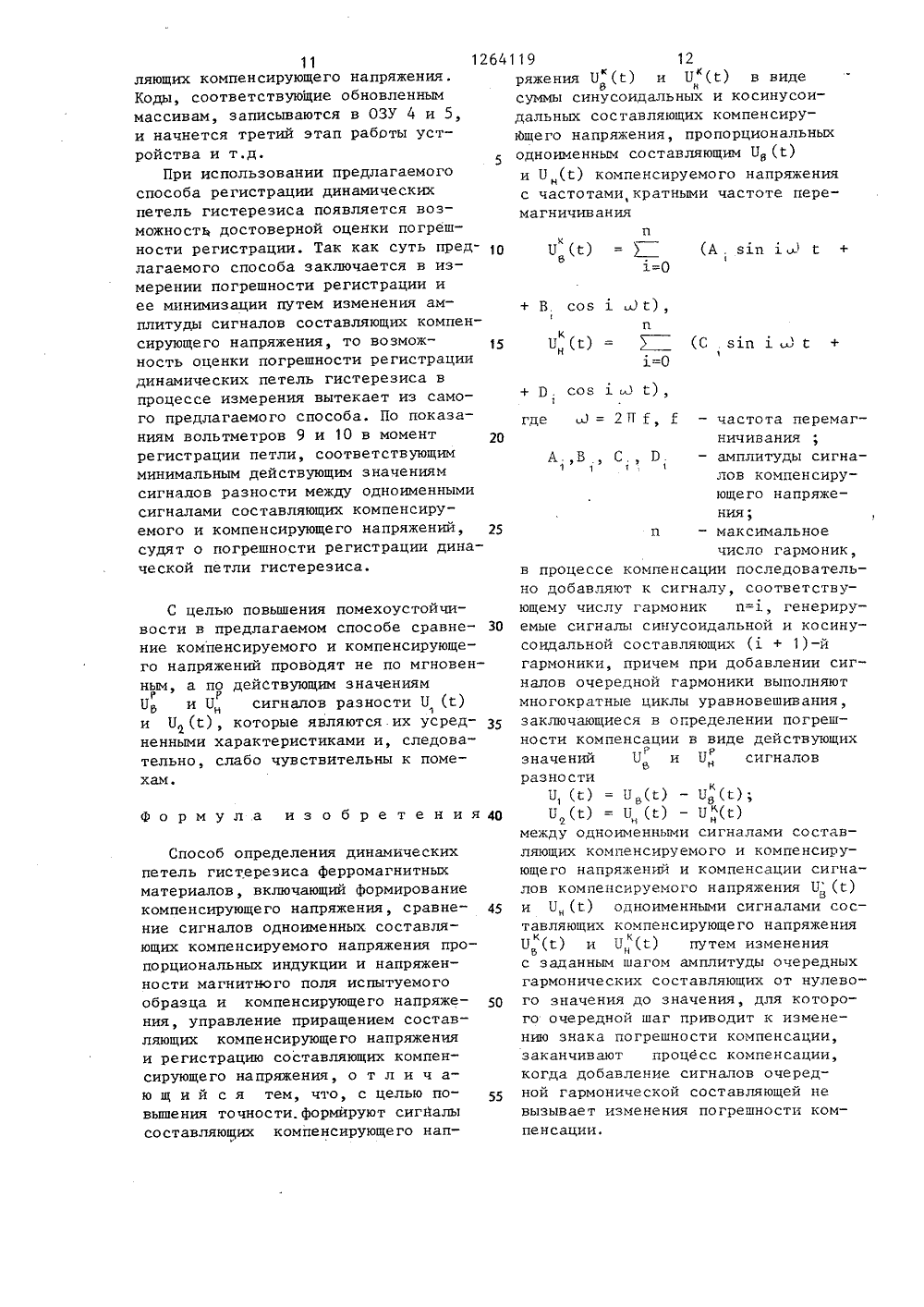
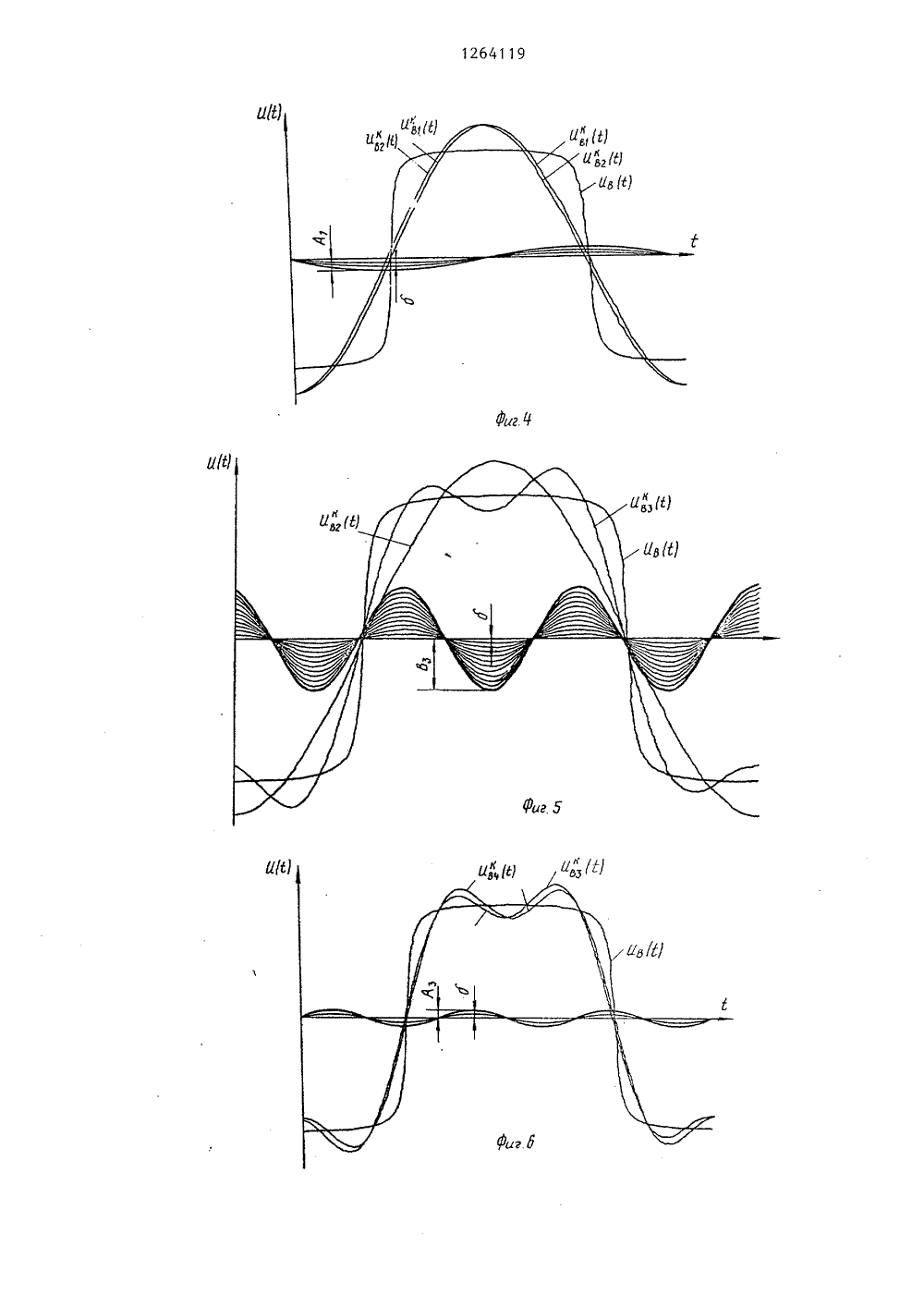
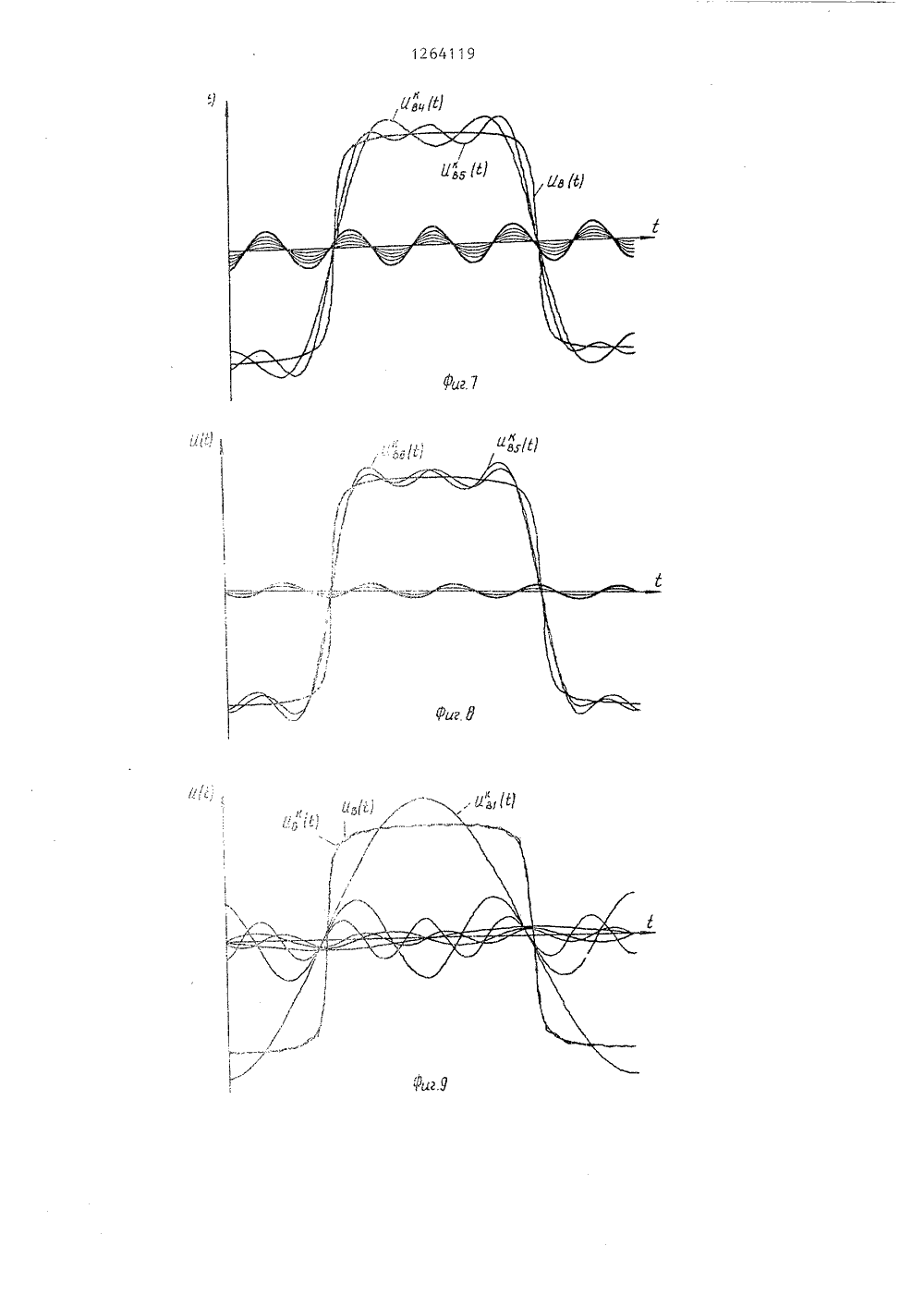
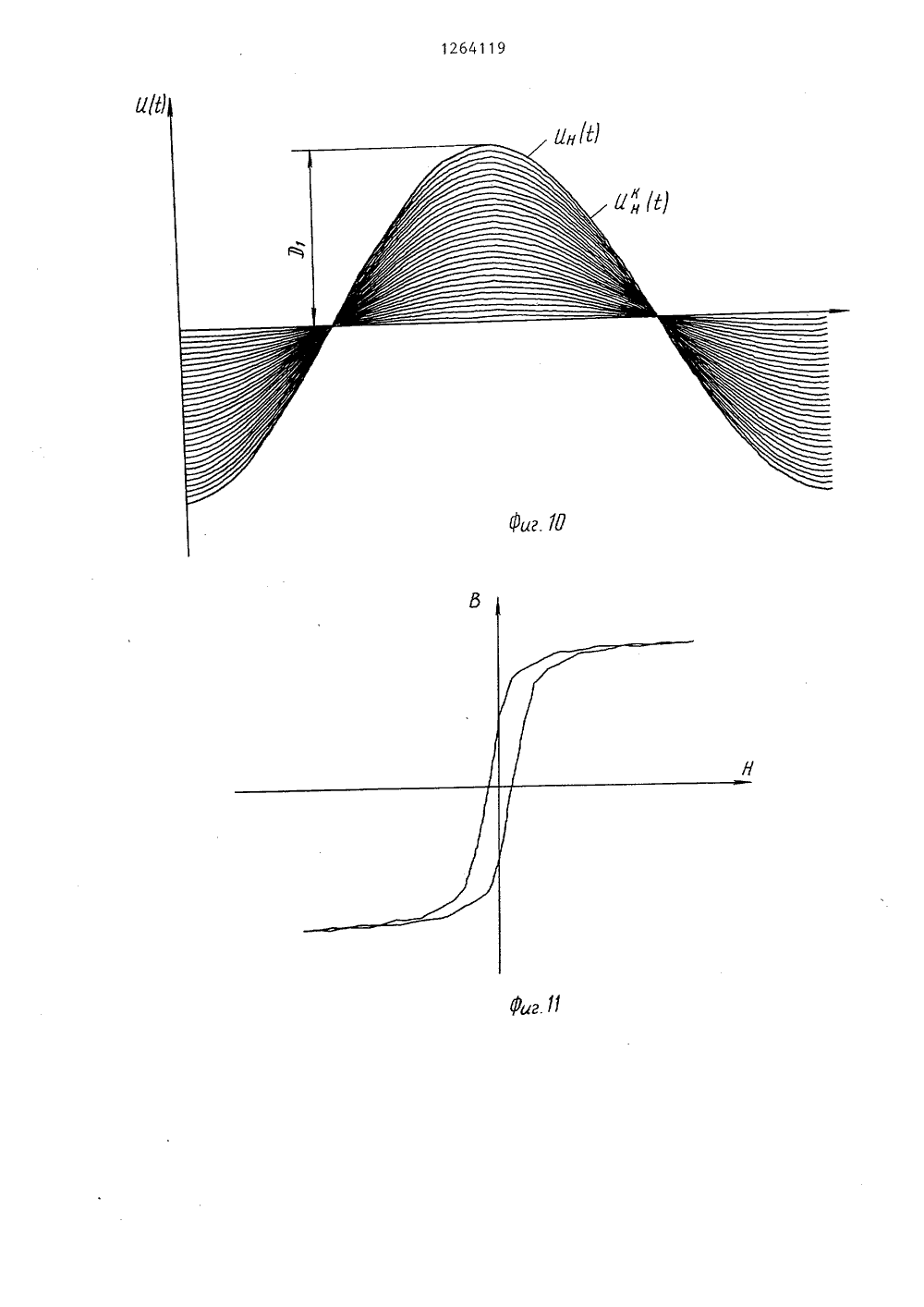
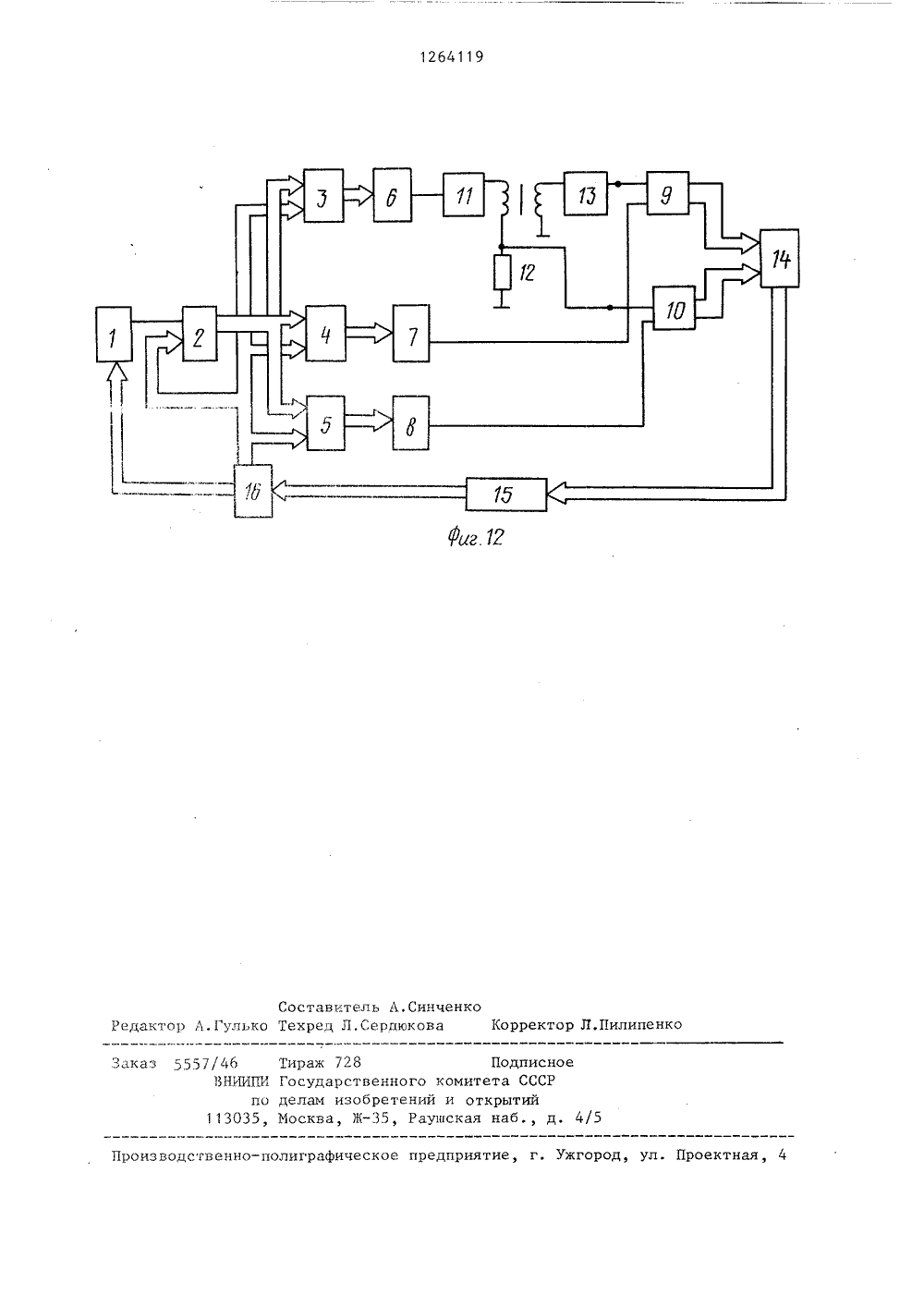
СОЮЗ СОВ ЕТСНИХ СОЦИАЛИСТИЧЕСН 2 РЕСПУБЛИК 1 К 33 14 ГОСУДАРСТВЕННЫЙ НОМИТЕТ ССПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫ Е ИЗОБРЕТЕНИЯ ; " /СВИДЕТЕЛЬСТВУв1р ОПИСАНИ ТОР сигна го на ции магнитног ряженности и и38ническВ.М.Еф о - аз институтнко итных материаловА.Я.Шихина. М.:84 льствоК 33/14(54) СПОСОБ ОПРЕДЕЛЕНИЯ ДИНПЕТЕЛЬ ГИСТЕРЕЗИСА ФЕРРОМАГМАТЕРИАЛОВ АМИЧЕСК НЫХИзобретение относитс тных измерений. Цель повышение точности ьности измерений, Сп а минимизации погреш ции, определяемой де ниями сигналов разно к област зобрете- произвооб осноте ости ком ствующти межд ч(56) Испытание магии систем /Под ред.Энергоатомиздат, 19Авторское свидет474745, кл, С 0105.07.1972. составляющих компенсируемоения, пропорциональных напля испытуемого ферромагнитного обрца, и одноименными сигналами составляющих компенсирующего напряжения,которые формируют в виде суммы сигналов синусоидальных и косинусоидальных гармонических составляющих. Компенсацию проводят путем выполнениямногократных циклов уравновешиваниясигналов составляющих компенсируемого напряжения с одноименными сигналами Составляющих компенсирующего напряжения, совершаемых при добавлении сигналов гармонических составляющих, амплитуду которых при каждом уравновешивании устанавливают соответствующей минимальной погрешности компенсации, Перед каждым уравновешиванием производят выбор направления приращения амплитуд сигналов гар- ,ы монических составляющих компенсирующего напряжения, 12 ил, Ь/4 б Тираж 3 НИИПИ Госудпо делам 13035, Москв рственногизобретенЖ, Р Подписикомитета СССРй и открытийущская наб дных материалов,Для достижения цели в известномспособе регистрации динамических петель гистерезиса, заданных в прямоугольной системе координат в видепеременных электрических напряжений,пропорциональных индукции и напряженности магнитного поля испытуемогоферромагнитного образца, включающемоперации формирования компенсирующего напряжения, сравнения сигналоводноименных составляющих компенсируемого и компенсирующего напряжений,управления приращением сигналов составляющих компенсирующего напряженияи регистрации динамической петли гистерезиса по сигналам составляющихкомпенсирующего напряжения, уравновешенным с сигналами одноименныхсоставляющих компенсируемого напряжения, формирование сигналов составляющих компенсирующего напряженияк к(С) и Ун (Г) производят в видесуммы синусоидальных и косинусоидальных сигналов, когерентных сигналамсоставляющих компенсируемого напряжения Н (С) и Б с частотами,кратными частоте перемегничивания+ 0 совгде и 1= 2 частота перемагничивания;амплитуды сигналов гармонических составля ющих сигналов компенсирующего напряжения,определяемые в процессе компенсации; максимальное число гармоник; номер гармоник, - О, и 1 1264Изобретение относится к магнитным измерениям и может быть использовано для автоматизированного определения динамических петель гистерезиса.Целью изобретения является повы 5 ление точности регистрации динамических петель гистерезиса ферромагнит 119сравнение сигналов одноименных составляющих компенсируемого и компенсирующего напряжений осуществляют путем нахождения погрешностей компенсации, определяемых действующими значениями У и Б сигналов разности У (д.) = Б (г.) - Н (с) и Цд(С) = = Цн - Б (С) между одноименными сигналами составляющих компенсируемого и компенсирующего напряжений, компенсацию сигналов составляющих компенсируемого напряжения осуществляют их последовательным уравновешиванием по синусоидальным и косинусоидальным сигналам гармонических составляющих компенсирующего напряжения, проводимым путем изменения амплитуд сигналов гармонических составляющих от нулевого значения до значения, соответствующего минимальной величине погрешности компенсации, процесс компенсации проводят путем выполнения многократных циклов уравновешивания, совершаемых при каждом добавлении к текущим сигналам Ни Б(С) генерируемых сигналов синусоидальных и косинусоидальных составляющих очередной гармоники, заканчивают процесс компенсации, когда добавление сигнала очередной гармонической составляющей не вызывает изменения погрешности компенсации, превышающего погрешность ее измерения, т,е, производят минимизацию погрешности компенсации до допускаемого данным способом предела, а перед каждым уравновешиванием сигналов Ув(Т) ик Н (г.) по гармоническим составлякющим, определяют действующие значеР Рния Б и Б сигналов разности О, (Т) и Н (С) при нулевой амплиту - де сигнала очередной составляющей и сравнивают их с действующими знаР Рчениями Б и Б сигналов разнности Б(с) и Б (Г) при амплитуде сигнала этой составляющей, равной выбранному значению шага прираР Р РМ. щения, и если УБ и УБто амплитуду сигнала гармонической составляющей наращивают с выбранным шагом, в противном случае - уменьшают с тем же шагом.На фиг. 1-10 изображены временныедиаграммы компенсируемых и компенсирующих сигналов на промежуточном этапе компенсации; на фиг. 11 - динамическая петля гистерезиса, зарегистрированная по окончании процесса1264 компенсации по сигналам составляющих компенсирующего напряжения; на фиг. 12 - обобщенная структурная схема устройства, реализующего предлагаемый способ.5Сущность способа определения динамических петель гистерезиса заключается в следующем. Сигналы первых составляющих компенсируемого и компенсирующего напряжений Б (.) и ПО пропорциональны индукции магнитного поля испытуемого образца, а сигналы вторых составляющих компенсируемого и компенсирующего напряжений 13 (Т) и КБ (, пропорциональны напряженности магнитного поля образца. Рассмотрим процЕсс компенсации на примере сигнала Б (:) при косинусоидальном режиме премагничивания образца(Б, (.) = Вн сов 21 йс,где й - частота 20 перемагничивания, Б,г - амплитуда сигнала, пропорционального напряженности поля. Сигналы Б (С), характерный для данного закона перемагничивания, показан на фиг. 5. В этом случае отсутствует постоянная составляющая сигнала и четные гармонические составляющие,В процессе перемагничивания образца определяют действующее значение Б сигнала разности У (.)кЦ (Т) - У (С) между одноименными сигналами первых составляющих.компенсируемого и компенсирующего напряжений при равенстве нулю сигнала первой сос - тавляющей компенсирующего напряжения кБ (г.) фиг. 2),Это действующее значение фиксируют.2. Начинают формирование сигнала первой составляющей компенсирующегок 40 напряжения У (.) . Для этого генеривруют косинусоидальный сигнал, когарентный одноименному сигналу компенсируемого напряжения Б (Т), с шагом о приращения амплитуды (т.е. сиг 45 нал косинусоидальной составляющейкпервой гармоники) Б (с) = Я сов 2 П К (фиг, 3), где У 6 8 ( 27,- пог - решность измерения действующе гоРзначения У сигнала разности У,(г.)503, Определяют действующее значеР%ние Б сигнала разности Б , в6 1 котором в качестве сигнала компенсиКрующего напряжения Уиспользуют сигнал, полученный в п. 2. Это дей ствующее значение фиксируют.4, Сравнивая действующее значение.Б , полученное в п. 3, с действу 119 4ющим значением У , зафиксированнымранее (п. 1), определяют разностныйосигнал И 3 = У - У ,в ье5. Если разностный сигнал ь 3(п. 4) больше нуля, то амплитудусигнала первой составляющей компенсирующего напряжения Б (с) (п. 2)наращивают путем осуществления приращений с шагом 8 , в противном случае уменьшают с тем же шагом,6. Произведя выбор направленияосуществления приращений (п, 5),сигнал первой составляющей компенси -Крующего напряжения У (С), полученвный в п. 2, формируют в виде Б (С)=(Р +д) соз 2 П 1 г. (Фиг, 3),7. Определяют действующее значение Кв сигнала разности Б, , вкотором в качестве сигнала первойсоставляющей компенсирующего напрякжения У (.) используют сигнал, полученный в и, 6,8. Сравнивания действующее значение 11(п. 7) с зафиксированнымранее (и. 3) действующим значениемБ +, определяют разностный сигнал1 Р Р 1 РВ = В 69. Если разностный сигнал дП,(и, 8) больше нуля, вновь производят требуемое изменение (наращивание или уменьшение) амплитуды формикрующегося сигнала Б,(1) с шагом 8Амплитуду сигнала П (:) продолжавют изменять с шагом 3 до тех пор,епока разностный сигнал дБв нестанет меньше нуля, т.е. до тех пор,пока действующее значение сигналаразности, определенное при очередном изменении амплитуды сигналаБ (г.) на величину о , не превыситдействующего значения сигнала разности, определенного при ее предыдущем изменении на ту же величину. Следовательно, определив направлениеосуществления приращений амплитудысигнала первой составляющей компенсирующего напряжения Б (,) (п. 5),уравновешивают этот сигнал с одноименным сигналом компенсируемогонапряжения П (с) по косинусоидальнойсоставляющей первой гармоники путемосуществления приращений амплитуды,Ксигнала П(С) с шагом 3 в выбран -ном направлении, В результате этогоамплитуду В сигнала У,(г.),кполученного в результате уравновешивания сигнала Б (.) с сигналомкБ (.) по косинусоидальной состав 1264119ляющей первой гармоники, устанавливают такой (фиг. 3), при которойдействующее значение Б сигналаразности Б (С) между одноименнымисигналами первых составляющих компенсируемого и компенсирующего напряжений минимально,10. Продолжают формирование сигнала первой составляющей компенсирукющего напряжения Б (т.). Для этого 10генерируют сигнал синусоидальнойсоставляющей первой гармоники с амплитудой, равной 8, и добавляютего к уравновешенному ранее (и, 9)сигналу П (Е) (фиг, 4) 15Б(г) = Б+ 8 з и 21 ГГтт т11. Производят уравновешиваниесгзл; П т к), полученного в п. ,0кс сигналстм Б по синусоидальной20составляющей первой гармоники путем,анапогч 1 г описанному для уравновешивания по косинусоидальной составляющей первой гармоники (п.п, 3-9),т.е, изменяют амплитуду сигнала си 251.усоидальной со тавляющей ервой гармоттики с аго" .(. в вь бРЯ 111 Ом напРНБЛЕ,ИИ, ттт .:;1 т ОЛ" тп 1 Н уСЛ:3 ттт О тнс З 1 т"О: ОГ. 9 ",ста;1 авлитзан се равнойЛф 5, ",; . Пр . т том ;:, та 1 С.т Сит -Нт 1.1 П 1,.., ттравновешеНН.Ы: первойт 2: т ./гармонике,12., Генериру 1 от сиг 11 а 5; кесинусоиДаЛЬНОй СОСтаВЛЯЮЩтЕй тРЕтЬЕй ГаРМОНИК; т 1;ЛттУДОЙ РаВНМ.;, И ДО-.(фИГ. 5) И НРИ ЭТОМ ПОУчахтт СИГнаЛП,;. т.), уравнотзеце 111 ый по ар Ой гарттмонике и косинусоидальной сос" являющей тре .ей гармоники,5014, Генерируют сигнал син,со"дальной сгтставляющей третье.1,15:тто -Нткхт с .ттт ли; тт 1 О .т,атз 1 Отт 1", .;,ттбат 5 НОт Е ГО К УРант 1 ОВЕ 111 ЕН 1 ОМУ РаНЕЕ(и 13) ситнану 1(.) (фиг. 6)з 1 55Б,(С) = 1+ 3 ви 3 2 И тйз15. Уравновешивают получившийссигнал Б (и. 14) аналогичным описанному путем, в результате амплитуду сигнала синусоидальной составляющей третьей гармоники устанавливают равной А (фиг. 6) и при этомкполучают сигнал Б , уравновешенный по двум гармоникам - первой итретьей.16. Поочередно генерируют сигналыкосинусоидальной и синусоидальнойсоставляющих пятой гармоники с амплитудой О , Поочередно добавляют ихк уравновешенному ранее (и. 15) сигкналу Б (С), производя уравновешивание получающегося при каждом добаглении формирующего сигнала Б .кВ результате этого получают сигналБ (т.) (фиг. 7), уравновешенныйпо первой, третьей и косинусоидальной гармонической составляющей пятойгармоникам, и сигнал Б (с) (фиг. 8)Куравновешенный по трем гармоникам(первой, третьей и пятой).17, Процесс компенсации, состоящий из многократных циклов уравновешивания, совершаемых при каждомдобавлении к текущему формирующемусяксигналу Б (т:) генерируемых сигналов косинусоидальных и синусоидаль 1 ь 1 х составляющих очередной гармоники,з акончится тогда, когда добавление составляющей очередной гармоники не вызывает такого изменения погрешностикомпенсации, определяемой действующимзначением П сигнала разности Б (Т),Ркоторое превышает погрешность ее измерения - 7По окончании процесса компенсации получают сформированный сигналпервой составляющей компенсирующегокнапряжения Б (Т) (фиг. 9).:Компенсация сигнала второй составляющей компенсируемого напряжения11 Н(г.) сигналом одноименной составляющей компенсирующего напряженияк11,производят одновременно с описанной (п.п. 1-17) компенсацией сигнала первой составляющей компенсируемого напряжения аналогичным образом.кДля сигнала 11 (С), характерногозаданному режиму перемагничивания,процесс компенсации завершится после уравновешивания этого сигналапо косинусоидальной составляющей первой гармоники:, в результате которогокамплитуду сигнала Пн(г.) устанавливают равной Р (фиг. 10),18, После завершения процесса компенсации производят регистрациюдинамической петли гистерезиса по сформированным в процессе компенсации сигналам составляющих компенси - Рующего напряжения с (г.) (фиг. 9)Ки Б (с) (фиг. 10, которые уравновешены с одноименными сигналами составляющих компенсируемого напряжения (фиг. 15).Обобщенная структурная схема для осуществления предлагаемого способа 10 (фиг, 12) содержит управляемый генеФратор (УГ) 1, подключенный к адресному счетчику (АС) 2, выход которого соединен с адресными входами оперативных запоминающих устройств 15 (ОЗУ) 3, 4 и 5, а они, в свою очередь, подключены к цифроаналоговым преобразователям (ЦАП) 6, 7 и 8 соответственно. Выходы ЦАП 7 и 8 соединены с вторыми входами цифровых 20 вольтметров (ЦВ) 9 и 10, а ЦАП 6 через усилитель мощности (УМ) 11 соединен с намагничивающей обмоткой испытуемого ферромагнитного образца, заземленной через образцовое соп ротивление 12 и подключенной к первому входу вольтметра 10, а первый вход вольтметра 9 через интегратор (И) 13 соединен с заземленной измерительной обмоткой испытуемого образ ца, Выходы вольтметров 9 и 10 через модуль привязки цифровых измерительных приборов (МП) 14 подключены к выходу на сопряжение ЭВМ 15, которая через подсистему ввода-вывода дискретной информации (ПВВ) 16, реализованной на базе пяти стандартных модулей, подключена к управляемому входу генератора 1, к входу принудительной установки адреса счетчика 2 40 и к информационным входам ОЗУ 3, 4 и 5.Управляемый генератор 1 служит для синхронизации работы схемы в процессе измерения и изменения сос тояний счетчика адреса 2. ЭВМ 15 управляет включением, выключением генератора 1 и установкой частоты генерируемыхим импульсов, которая производится в зависимости от тре - 50 буемой частоты перемагничивания.Адресный счетчик 2 - п-разрядный двоичный суммирующий счетчик с воз - можностью предустановки - предназначен для задания адреса на все 55 ОЗУ. С каждым приходом импульса с выхода управляемого генератора 1 адресный счетчик 2 увеличивает свое состояние на 1 (адрес изменяетсяна 1), т.е. работает в режиме суммирования. С целью принудительнойустановки адреса при записи информации в ОЗУ из ЭВМ счетчик работаетв режиме записи параллельного кодаот ЭВМ.ОЗУ 3, 4 и 5 предназначены длязаписи в них, хранения и воспроизведения информации о форме кривых,ЦАП 6, 7 и 8 - для преобразованиязакодированной информации, поступающей из ОЗУ, в аналоговые сигналыусилитель мощности 11 - для получе -ния сигнала, достаточного для намагничивания образца в переменном псле,интегратор 13 - для получения сигнала, пропорционального индукции Бполя в ферромагнитном образце.Цифровые вольтметры 9 и 10 используют для определения действующих зна -чений сигналов разности между одноименными сигналами составляющих ком -пенсируемогс и компенсирующего напряжений, устройство сопряжения - длясвязи вольтметра 9 и 10 с ЭБ.1 15,ЭМВ 15 - для реализации алгоритмавычисления и управления блоками устройства.Устройство сопряжения предназна -чено для связи управляемого генера -тора 1, адреснсгс счетчика 2 и ОЗУ3, 4 и 5 с ЭВМ 15.При включении управляемсгс генератора 1 ст ЭВМ на адресный счетчик2 начнут поступать периодическиеимпульсы, вследствие чего с приходом каждого импульса счетчик нарашивает свое состояние на 1. Причемкаждому состоянию счетчика адресасоответствуют определенные ячейкипамяти ОЗУ 3, 4 и 5,Состояние адресного счетчикабудет изменяться следующим образом:О, 1, 2, , 2 - 1, О, 1, 22 - 1,0,1,2,т.е.периодически спериодом 2 Т где и - количестч;во разрядов адресного счетчика; Тпериод импульсов, поступающих с управляемого генератора. Следовательно, периодически будет изменятьсякод на выходах ОЗУ, а также и напряжения на выходах ЦАП,Так как адресные входы всех ОЗУобъединены и питаются от одногосчетчика, то в каждый момент временивоспроизводится одна и та же ячейкатор 13, пропер;ионален индукции магнитного поля В(С) и являясь сигналом другой составляющей компенсируемого напряжения - 1. , поступает 1 а первый Вход Вольтметра ОНа выходах вольтметров 9 и 1 О появляются сигн"лы действующих зна - чений П и Ь сигналов разности Н= П,- Пи Ц,=- Б к между одноименными сигналами составляющих комле;-.сируе - мого и компенсирующего напр.-.з;ений.,. анись информ 1 ии в 0 3 - , и ) производится следующим образом, ЭВЯ через подсистему ввода-вывода дискретной информации 16 засылает в адресный счетчик 2 номер ячейки памяти ОЗУ 3, в которую через ту же 50 памяти из всех ОЗУ (все ОЗУ одноготипа) .Таким образом, на выходы ЦАП б,7 и 8 сигналы поступят одновременно: на вход ЦАП б закодированный 5сигнал, соответствующий косинусоидальному режиму перемагничивания,на входы ЦАП 7 и 8 закодированныесигналы, соответствующие сигналамсоставляющих компенсирующего напря Ожения, а именно на вход ЦАП 7 кодсигнала первой составляющей компенк .сирующего напряжения - Б (г) навход ЦАП 8 - код сигнала второй составляющей компенсирующего напряжения - П (1;), Пройдя через ЦАП 6, 7ки 8, сигналы, преобразованные в аналоговую форму, поступят соответственно на усилитель мощности 11 и вторыевходы вольтметров 9 и 10. 20С усилителя мощности 11 сигнал,Достаточный для намагничивания образца в переменном поле, поступаетна намагничивающую обмотку испытуемого ферромагнитного образца тороицальной рормы,Падеие напряжения на образцовомсопротивлснии 12, включенном в намаг -ничива,ощуо цепь образца, пропорционально напряженности магнитного поля 30Н(г:), Сигнал, поступающий на первый.вход вольтметра 10 - Б (-.) - сигналодной составляющей компенсиру-.могонапряженияМгновенное значение ЭДС, появив- З 5шееся на концах измерительной обмотки, пропорционально скорости изменения индукции магнитного поля11Сй- Сигнал, прошедший через интегра подсистему 16 пересылает код, соответствующий одному элементу введенного в ЭВМ массива, в котором хранится информация о требуемом режиме перемагничивания образца, Затем в адресный счетчик 2 ЭВМ засылает номер второй ячейки памяти ОЗУ 3, в которую также пересылает код, соответствующий другому элементу этого массива, и повторяется это М раз, где И - количество ячеек памяти ОЗУ, После пересылки всех кодов в ОЗУ 3 ЭВМ таким же образом опрашивает второй массив, соответствующий кодам, которые она должна записать в ОЗУ 4 (перед началом компенсации - это нули), и наконец третий массив, соответствующий кодам, предназначенным для записи в ОЗУ 5 (перед началом компенсации - тоже нули).После заполнения всех ячеек памяти ОЗУ 3, 4 и 5 ЭВМ через подсистему ввода-вывода дискретной информации выдает команду на включение управляемого генератора 1. В результа - те на выходах вольтметров 9 и 10Р появятся действующие значения П и РПсигналов разности Б(г:) и П (1). Эти действующие значения фиксируются в памяти ЭВМ с целью сравнения их с действующими значениями, которые получатся в результате следующего этапа работы устройства.ЭВМ, подав команду на выключениеуправляемого генератора 1, описаннымспособом записывает в ОЗУ 4 и 5 коды, соответствующие сигналам составляющих компенсирующего напряжения (на втором этапе работы устройства - это коды, соответствующие сигналам косинусоидальных составляощих первой гармоники с амплитудой,лравной Ь ), Информация, записанная в ОЗУ 3 перед началом компенсации, остается без изменения в течение все - го процесса компенсации. ЭВМ выдает команду на включение управляемого генератора 1 и выполняется второй этап работы устройства. ДействующиеРФ Р значения Б в и Б, полученные во7втором этапе, сравниваются с дейст -Р вующими значениями П и Пзафиксированными ранее (в первом этапе), и в зависимости от результатов сравнения в памяти ЭВМ произведется нужное изменение массивов, каждыйэлемент которых является мгновеннымзначением текущих сигналов состав1264 11ляющих компенсирующего напряжения. Коды, соответствующие обновленным массивам, записываются в ОЗУ 4 и 5, и начнется третий этап работы устройства и т.д.При использовании предлагаемого способа регистрации динамических петель гистерезиса появляется возможность достоверной оценки погрешности регистрации. Так как суть предлагаемого способа заключается в изС целью повышения помехоустойчивости в предлагаемом способе сравне ние компенсируемого и компенсирующего напряжений проводят не по мгновенным, а по действующим значениям в РБ и Б сигналов разности Б (с) и Б (С), которые являются.их усред- З 5 ненными характеристиками и, следовательно, слабо чувствительны к помехам,формула изобретения 40 Способ определения динамических петель гистерезиса ферромагнитных материалов, включающий Формирование компенсирующего напряжения, сравнение сигналов одноименных составляющих компенсируемого напряжения пропорциональных индукции и напряженности магнитного поля испытуемого образца и компенсирующего напряжения, управление приращением составляющих компенсирующего напряжения и регистрацию составляющих компенсирующего напряжения, о т л и ч аю щ и й с я тем, что, с целью повьппения точности. Формируют сигйалы составляющих компенсирующего нап 45 50 55 мерении погрешности регистрации иее минимизации путем изменения амплитуды сигналов составляющих компенсирующего напряжения, то возможность оценки погрешности регистрациидинамических петель гистерезиса впроцессе измерения вытекает из самого предлагаемого способа. По показаниям вольтметров 9 и 10 в моментрегистрации петли, соответствующимминимальным действующим значениямсигналов разности между одноименнымисигналами составляющих компенсируемого и компенсирующего напряжений, 25судят о погрешности регистрации диначеской петли гистерезиса.119 12ряжения Б (с) и Б (с) в видев нсуммы синусоидальных и косинусоидальных составляющих компенсирующего напряжения, пропорциональных одноименным составляющим Б (С) и П(с) компенсируемого напряжения с частотами, кратными частоте пере- магничивания пк+ П, сов 1. аЗ с),где о)= 2 П 1, й частота перемагничиванияамплитуды сигналов компенсирующего напряжения;максимальное А.,В , С., Р. 1 1 1,число гармоник, в процессе компенсации последовательно добавляют к сигналу, соответствующему числу гармоник п=., генерируемые сигналы синусоидальной и косинусоидальной составляющих ( + 1)-й гармоники, причем при добавлении сигналов очередной гармоники выполняют многократные циклы уравновешивания, заключающиеся в определении погрешности компенсации в виде действующихРзначений П и Б сигналоввразностиП(с) = И,(с) - и (с);Ь,(с) = П(с) - ц(с)между одноименными сигналами составляющих компенсируемого и кампенсиру - ющего напряжений и компенсации сигналов компенсируемого напряжения П; (с) и Б(С) одноименными сигналами сос - тавляющих компенсирующего напряжения П (с) и Б(с) путем изменения с заданным шагом амплитуды очередных гармонических составляющих от нулевого значения до значения, для которого очередной шаг приводит к измене - нию знака погрешности компенсации, заканчивают процесс компенсации, когда добавление сигналов очередной гармонической составляющей не вызывает изменения погрешности компенсации.
СмотретьЗаявка
3933365, 11.06.1985
ОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
СЕЛЕЗНЕВ ЮРИЙ ВАЛЕРИАНОВИЧ, ЕФИМЕНКО ВИКТОР МИХАЙЛОВИЧ, ИВАНОВА НИНА ИВАНОВНА
МПК / Метки
МПК: G01R 33/14
Метки: гистерезиса, динамических, петель, ферромагнитных
Опубликовано: 15.10.1986
Код ссылки
<a href="https://patents.su/12-1264119-sposob-opredeleniya-dinamicheskikh-petel-gisterezisa-ferromagnitnykh-materialov.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения динамических петель гистерезиса ферромагнитных материалов</a>
Способ компенсации дрейфа нуля интегратора при интегрировании периодического сигнала без постоянной составляющей

Номер патента: 873249
Опубликовано: 15.10.1981
Авторы: Россо, Рудаков, Столяров
МПК: G06G 7/186
Метки: дрейфа, интегратора, интегрировании, компенсации, нуля, периодического, постоянной, сигнала, составляющей
...подаются на.инвертирующий вход интегратора 1. Выход интегратора873249 Формула изобретения Заказ 9049/75 Подписное соединен с коммутирующим ключом 2, который через диоды 8 и 9 соединен с инвертирующими входами интеграторов б и 7 дрейфа нуля. Параллельно интеграторам б и 7 дрейфа нуля включены коммутирующие ключи 3 и 4. Выходы интеграторов б и 7 дрейфа нуля подключены на инвертирующий вход операционного усилителя 10.Способ осуществляется следующим образом. ОНа инвертирующий вход интегратора 1 подается сигнал. На выходе, после выполнения операции интегрирования к полезному сигналу добавляется сигнал, пропорциональный интегралу от дрейфа нуля. для выявления составляю з щей, обусловленной дрейфом, выходной сигнал через коммутирукарсй...
Восстановитель постоянной составляющей импульсных сигналов

Номер патента: 792580
Опубликовано: 30.12.1980
Автор: Доценко
МПК: H03K 6/00
Метки: восстановитель, импульсных, постоянной, сигналов, составляющей
...заднега фронта выходного сигнала, Эффектобострения вершины является положительным для последующих устройств.При ЙО(МОтак генератора равеннулю, и на выходе устройства сразупосле положительного выброса появляется импульс-сателлит, по длительности равный величине задержки. Этот импульс регистратор не воспринимаеткак сигнал, так как ан появляетсясразу после регистрируемого входногосигнала и попадает в мертвое время 4 Опреобразователя, В других случаяхега исключает из регистрации схемарегистрации, Поэтому этот импульссателлит не искажает спектр. Передприходом очередного входного импульса генераторы 3 и 5 работают совместна,При переходе через нуль и появлении небольшого выброса положительнойполярности потенциал на выходе усилителя б...
Устройство для выделения квадратурных составляющих узкополосных сигналов

Номер патента: 1019583
Опубликовано: 23.05.1983
Авторы: Иноземцев, Козько, Коротких, Моргулев, Пивоваров, Плетнев, Садовский, Смирнов
МПК: H03D 3/00
Метки: выделения, квадратурных, сигналов, составляющих, узкополосных
...ошибки, обусловленнойпогрешностями фазового сдвига спектральных составляющих частоты, не равной несущей частоте.1Целью изобретения является повышение точности выделения квадратур.Цель достигается тем, что в устройство для выделения квадратурныхсоставляющих узкополосных сигналов,содержащее источник входного сигналапоследовательно соединенные генератор тактовых импульсов и делительчастоты, временной дискретизатор,опорный вход которого подключен кгенератору тактовых импульсов, идва канала обработки сигналов, каждый из которых содержит последовательно соединенные переключатель,сумматор и фильтр нижних частот, атакже инвертор, вход которого соединен со вторым выходом переключателя, введены опорный генератор гармонического сигнала,...
Устройство для выделения квадратурных составляющих узкополосных сигналов

Номер патента: 1084948
Опубликовано: 07.04.1984
МПК: H03D 3/00
Метки: выделения, квадратурных, сигналов, составляющих, узкополосных
...сигнала и генератора тактовых импульсов,На фиг. 1 приведена структурнаяэлектрическая схема устройства длявыделения квадратурных составляющихузкополосных сигналов, на Фиг, 2спектр узкополосного сигнала; нафиг. 3 и 4 - зпюры, поясняющие работу устройства для вьщеления квадратурных составляющих узкополосныхсигналов,устройство для вьщеления квадратурных составляющих уэксполосныхсигналов содержит источник 1 входного сигнала, перемножитель 2, опорный генератор 3 гармонического сигнала, первый фильтр 4 нижних частот,временной дискретизатор 5, дополнительный переключатель 6, генератор7 тактовых импульсов, делитель 8частоты, ограничители 9 и 10, дифференциатор 11, счетчик 12 импульсов,цифроаналоговый преобразователь 13,генератор 1...
Способ измерения квадратурных составляющих периодических сигналов

Номер патента: 1525599
Опубликовано: 30.11.1989
Авторы: Кондратов, Скрипник, Скурихин
МПК: G01R 19/06
Метки: квадратурных, периодических, сигналов, составляющих
...(26) с опорным (2) иквадратурным (3) сигналами и выделенияих постоянных составляющих. При Я1ф оЯ 1 с,=1 с, С = 0 квадратурные составляющие описываются выражениями(21) и (22).Устройство для осуществления способа измерения квадратурных составляющих исследуемого физического процесса содержит источник 1 физического процесса, первый - четвертый цифроаналоговые преобразователи 2-5, интегрирующий аналого-цифровой преобразователь 6, модулятор 7, генератор 8 25опорного сигнала, делитель 9 частоты,счетчик 10 импульсов, первый 11 ивторой 12 регистраторы квадратурныхсоставляющих, квадратурный фазовращатель 13, первый 14 и второй 15 блоки 30сдвига частоты, датчик 16 физическойвеличины, сумматор 17, избирательныйусилитель 18, синхронный детектор...
Предыдущий патент: Устройство для разбраковки сердечников по импульсной магнитной проницаемости
Следующий патент: Делитель напряжения
Случайный патент: Многокомпонентная дозирующая установка