Система управления дробилкой
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
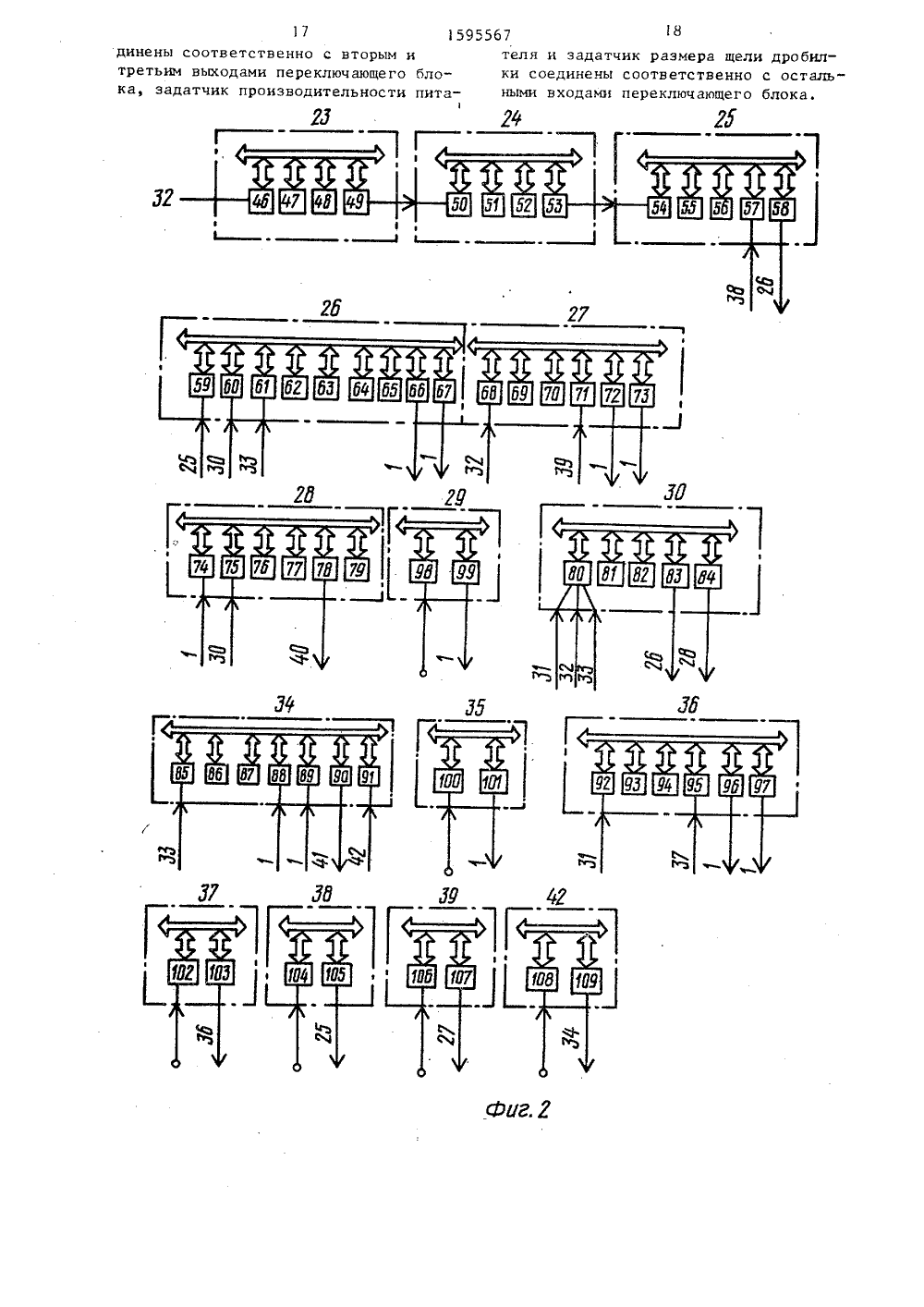
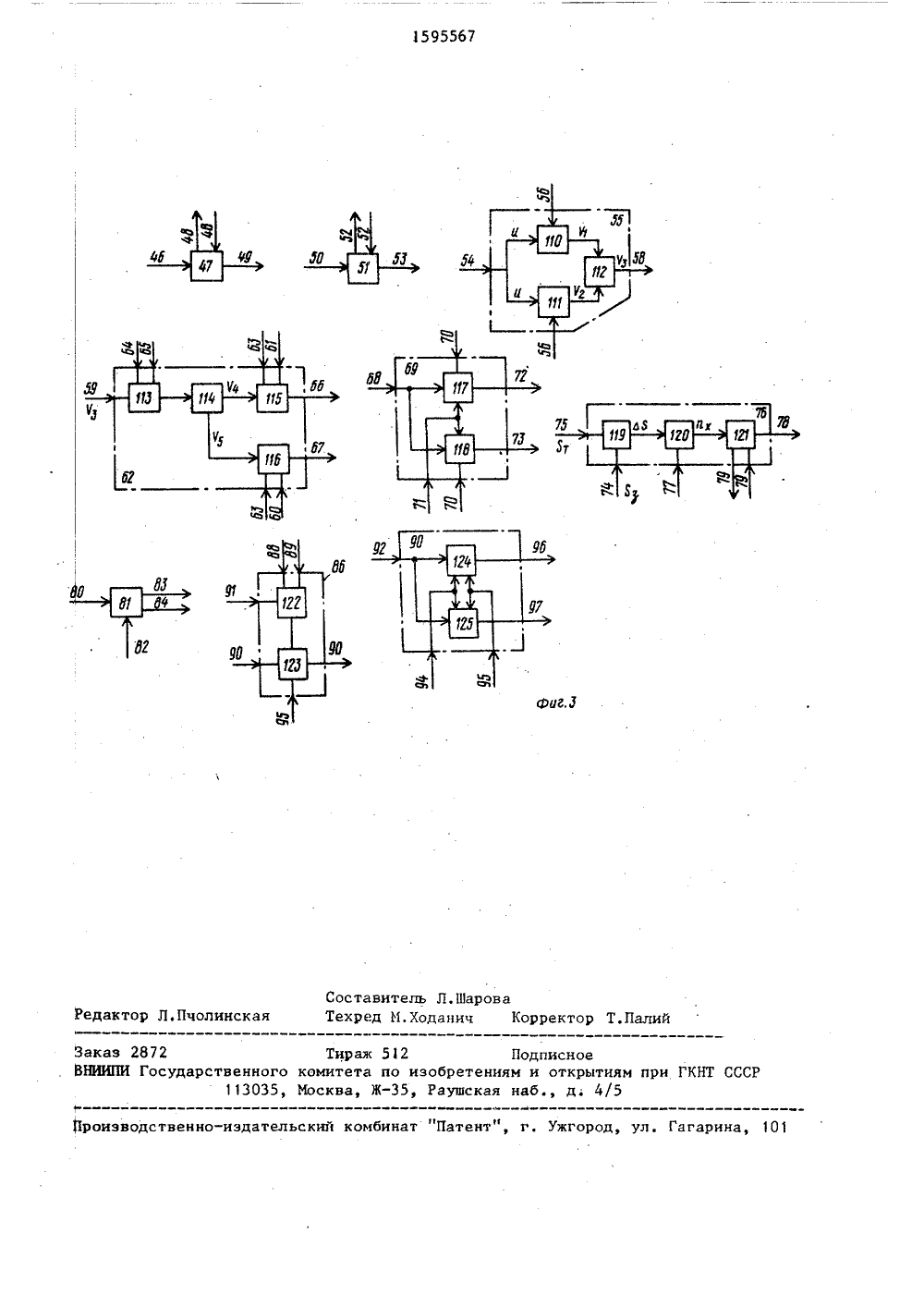
)5 В 02 С 25/00 ОПИСАНИЕ ИЗОБРЕТЕН АВТОРСКОМУ СВИ ЕТЕЛЬСТВ оГОСУДАРСТВЕННЫЙ НОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТНРЫТИЯМПРИ ГКНТ СССР(71) Всесоюзный научно-исследовательский и проектный институт механической обработки полезных ископаемых"Механобр" и Харьковское научно-производственное объединение по системамавтоматизированного управления(56) Авторское свидетельство СССРУ 1158237, кл. В 02 С .25/00, 1980.Авторское свидетельство СССРУ 1268202, кл, В 02 С 25/00, 1985.(54) СИСТЕМА УПРАВЛЕНИЯ ДРОБИЛКОЙ(57) Изобретение относится к управлению конусными дробилками, может бытьиспользовано на обогатительных фабриках цветной и черной металлургии,а также на предприятиях химическойпромышпенности и промышленности стройматериалов и позволяет повысить качество управления. Система содержит переключающий блок 1, сглаживающий фильтр 23, дифференциатор 24, компаратор 25, блок 26 управления, регулятор 27 уровня материала в дробилке, регу лятор 28 размера щели дробилки, задатчик 29 размера щели, вычислительный блок 30, датчик 31 мощности электродвигателя дробилки, датчик 32 уровня материала в дробилке, датчик 33 производительности питателя, регулятор 34 производительности питателя, задатчик 35 производительности питателя, регулятор мощности электр двигателя дробилки, задатчик 37 мощности электродвигателя дробилки, задатчик 38 скорости изменения уровня материала в дробилке, задатчик 39 уровня материала в дробилке, исполнительные механизмы 40 и 41 регулирующих органов соответственно размера щели дробилки и производительности питателя и задатчик 42 предельного значения мощности электродвигателя дробилки, 3 ил,1595567 Составитель Л.ШароваТехред М.Ходанич Корре Палий Редактор Л.Пчолинска роизводственно-издательский комбинат "Патент",ул. Гагарина, 101 жг аказ 2872 НИИПИ Государственного 113035, Тираж 512 омитета поМосква, ЖПодписноеобретениям и открытиям при ГКНТ ССРаушская наб., д, 4/5микропроцесперативной па связи,Изобретение относится к технике управления конусными дробилками и мощет быть использовано на обогатительных фабриках цветной и черной метал 5 лургии, а также на предприятиях химической промьппленности и промьппленЦости стройматериалов,Цель изобретения - повьшение качества управления, 10На фиг,1 представлена блок-схема системы управления дробилкой; на в тственно.г.2 и 3 - схемы блоков системы равления и микропроцессоров соот 15Система содержит переключающий бпток 1 в виде трех сблокированных переключателей, снабженных соответствующими группами контактов 2-22, сглаживающий фильтр 23, дифференциа тор 24, компаратор 25, блок 26 управения, регулятор 27 уровня материаладробилке, регулятор 28 размера ели дробилки, задатчик 29 размера ели, вычислительный блок ЗО (разме а щели), датчик 31 мощности электроигателя дробилки, датчик 32 уровня материала в дробилке, датчик 33 производительности питателя, регулятор 4 производительности питателя, заатчик 35 производительности питатея, регулятор 36 мощности злектродвиателя дробилки задатчик 37 мощноси электродвигателя дробилки, зацатчик 38 скорости изменения уровня материала в дробилке, задатчик 39 уровня материала в дробилке, исполнительный механизм 40 регулирующего органа размера щели дробилки, исполнительный механизм 41 регулирующего Органа производительности питателя, задатчик 42 предельного значения мощности электродвигателя дробилки, дробилку 43, электродвигатель 44 дробилки и питатель 45. 45Сглаживающий фильтр 23 включает в Себя элемент 46 ввода сигналов поСтоянного тока, микропроцессорный контроллер (микропроцессор) 47, элемент 48 оперативной памяти и элемент 49 связи между блоками (фиг.2).Дифференциатор 24 содержит элемент 50 связи между блоками, микропроцессор 51, элемент 52 памяти и элемент 53 связи.55Компаратор 25 состоит из элемента 54 связи между блоками сора 55, элемента 56 о мяти и элементов 57 иБлок 26 управления содержит элементы 59 и 60 связи между блоками, элемент 61 ввода сигналов постоянного тока, микропроцессор 62, элемент 63 оперативной памяти, интервальные таймеры 64, 65 и элементы 66 и 67 связи.Регулятор 2 уровня материала в дробилке состоит из элемента 68 ввода сигналов постоянного тока, микропроцессора 69, элемента 70 оперативной памяти и элементов 71-73 связи между блоками.Регулятор 28 размера щели дробилки реализуется при помощи элементов 74 и 75 связи между блоками, микропроцессора 76, элемента 77 оперативной памяти, элемента 78 вывода сигнала постоянного тока, интервального таймера 79. р 62 оков блок еализуетблока 11114 выбозводитель праце ующих унк- шаго- на- ости цию сл вого в люче га л пр Вычислительный блок ЗО включаетв себя элемент 80 ввода сигналов по-.стоянного тока, микропроцессор 81,элемент 82 оперативной памяти иэлементы 83 и 84 связи между блоками.Регулятор 34 производительностипитателя образуют элемент 85 вводасигнала постоянного тока, микропроцессор 86, элемент 87 оперативнойпамяти, элемент 88 ввода сигнала постоянного тока, элемент 89 связи между блоками, элемент 90 вывода частотных сигналов и элемент 91 связи.Регулятор 36 мощности содержитэлемент 92 ввода сигналов постоянноготока, микропроцессор 93, элемент 94оперативной памяти и элементы 95-97связи между блоками,Задатчик 29 включает в себя модуль98 ручного ввода и элемент 99 связи,задатчик 35 - 100 и 101, задатчик 37 -102 и 103, задатчик 38 - 104 и 105,задатчик 39 - 106 и 107, задатчик 42108 и 109,На фиг.З представлена структурамикропроцессоров 47-90. Микропроцессоры разбиты на функциональные субблоки.Микропроцессоры 47 и 51 реализуютфункцию сгпаживания и дифференцирования вМикропроцессор 55 включает в себяблоки 110-112 сигнум-преобразователей95567 6уменьшает производительность питателя 45. Этим осуществляется зашитадробилки от перегруза,5Режим 111 - минимизация размеращели при постоянной производительности питателя (замкнуты контакты 4, 1,18 блока 1). Известно, что, чемменьше размер выходной щели дробилки, тем больше дробится материал (выше степень дробления).Для последующих этапов переработкируд важно иметь по возможности болеевысокую степень дробления, что обеспечивается минимизацией размера щели.Размер щели связан с пропускной способностью дробилки. Чем меньше щель,тем меньше при неизменной дробимостиматериала ее пропускная способность. 55 515 и размеру щели, блока 115 формирования управляющего воздействия по произ водительности питателя, блока 116 формирования управляющего воздействия по размеру щели; микропроцессор 69 - блоков 117 и 118 формирования ПИ-закона регулирования; микропроцессор 76 - . блока 119 определения отклонения размера щели от задания, блоков 120 определения числа ходов регулирующего органа щели и блоков 121 формирования циклов корректировки размера щели.Микропроцессор 81 осуществляет расчет размера щели.Микропроцессор 86 реализует функции блока 122 ограничения по мощности и блока 123 Формирования ПИ-закона регулирования; микропроцессор 90 - блоков 124 и 125 формирования ПИ-закона регулирования,Сущность работы системы заключается в следующем.В зависимости от текущей производственной ситуации система посредством блока 1 переключений устанавливается в один из режимов. Режим 1 - стабилизация мощности приводного двигателя дробилки на заданном уровне путем изменения производительности питателя при постоянном режиме щели (замкнуты контакты 2, 9 и 16 блока 1). В регулятор 36 мощности через задатчик 37 вводится требуемый уровень мощности, Регулятор 36 в зависимости от величины отклонения текущего значения мощности от задания вырабатывает такую уставку регулятору 34 производительности, которая уменьшает указанные отклонения, Размер щели также стабилизируется при помощи задатчика 29 и регулятора 28,Режим 11 - стабилизация производительности и размера щели при ограничении производительности по мощности (замкнуты контакты 3, 10 и 7 блока 1). В данном режиме при постоянньгх производительности и размере щели возможен перегруз дробилки в случае резкого увеличения прочности дробимого материала. С целью исключения перегруза в регулятор 34 производительности вводятся текущее и предельное значения мощности, при достижении последнего дробилка считается перегруженной и регулятор 34 25 30 35 40 45 50 При приближении пропускной способности к производительности питателя уровень руды в дробилке увеличивается. В момент совпадения пропускной способности с производительностью скорость изменения уровня резко возрастает (скорость положительная).С увеличением размера щели или уменьшением прочности материала пропускная способность увеличивается, интенсивность разгрузки дробилки возрастает и уровень материала в дробилкс падает (скорость отрицательная). В данном режиме система с помощью датчика 32 уровня, сглаживающего Фильтра 23 и дифференциатора 24 оценивает скорость изменения уровня и, сравнивая ее с заданным верхним (положительным) и нижним (отрицательным) граничными значениями в компараторе 25, выдает через блок 26 управления команду на увеличение или уменьшение размера щели.При этом возможны три ситуации.А.Скорость изменения уровня отрицательна и достигает отрицательного граничного значения, при котором происходит разгрузка дробилки. В этом случае система шагами уменьшает размер щели до достижения положительного (граничного) значения скорости, после чего увеличивает щель до значения на предыдущем шаге. Б.Скорость изменения уровня положительна и достигает положительного граничного значения. В данной ситуации сначала увеличивается размер щели до достижения отрицательного граничного значения скорости, а затем шага 1595567ми уменьшается до тех пор, пока недостигается положительное граничноезначение. Вслед за этим увеличиваетсяразмер щели до его значения на преды 5дущем шаге,В.Скорость находится в пределахмежду отрицательным и положительнымпороговыми значениями. Размер щелине изменяется. 10В данном режиме система фактическ регулирует пропускную способностьдр билки, приближая ее к заданнойпр изводительности питателя,Режим 17 - стабилизация уровняматериала в дробилке путем измененияпроизводительности питателя при постоянном размере щели (замкнуты контахты 5, 12, 19 блока 1).Текущее значение уровня от датчика 32 вводится в регулятор 27 уровня,где сравнивается с заданным значением, а полученное таким образом рассогласование преобразуется в изменене производительности питателя, направленное на устранение указанногорассогласования,Режим 7 - максимизация произвотельности питателя при постоянномразмере щели (замкнуты контакты 6,13, 20 блока 1).В этом режиме, как и в 111 режиме,осуществляется сближение значенийп 1 оизводительности питателя и пропускной способности дробилки, но непутем уменьшения размера щели, апосредством увеличения производительности.питателя.Система увеличивает производительность питателя до тех пор, пока дробйлка не начнет перегружаться, а скорость изменения уровня возрастет доверхнего граничного значения. ди 30 0 При управлении в таком режим также возможны 3 ситуации.А.Скорость достигает отрицательного граничного значения, Тогда система шагами увеличивает производительность питателя до достижения положительного граничного значения скорости, после чего уменьшает производительность до ее значения на предпоследнем шаге.Б.Скорость достигает положит го граничного значения. В этом чае система уменьшает производи ность питателя до достижения от тельного граничного значения скоросельно 5 слуте,пь- рица 45нию. Вычислительный блок ЗО чен для вычисления размерредназн щели др ти, а затем шагами увеличивает ее до. тех пор, пока скорость не достигнет положительного граничного значения и устанавливает ту производительность, которая была на предпоследнем шаге.В,Скорость находится в пределах между отрицательным и положительным граничными значениями. Производительность питателя не изменяется,Режим 71 - стабилизация уровня руды в загрузочной камере путем изменения размера щели при постоянной производительности питателя (замкнуты контакты 7, 14, 21 блока, 1).Регулятор 27 уровня осуществляет непосредственное воздействие .на объект путем изменения задания регутору 28 размера щели, который и устанавливает ее в требуемое положение.Режим Ч 11 - стабилизация мощности двигателя дробилки путем регулирования размера щели при постоянной про-. изводительности питателя.Системы в различных режимах работают следующим образом.1.Стабилизация мощности и размеращели,Переключающий блок 1 устанавливается в положение, в котором замыкаютсяконтакты 2, 9 и 16. Сигнал с первоговыхода блока 36 через контакт 9 блока 1 поступает на второй вход регулятора 34 производительности. Этот сигнал, пропорциональный отклонению текущей мощности, измеренной датчиком31, от заданной мощности, вводимойсоответствующим задатчиком, воспринимается регулятором 34 как задание попроизводительности. Регулятор 34воздействует на производительностьпитателя 45 таким образом, чтобы уменьшить отклонение мощности.Одновременно блок 1 при помощиконтакта 16 соединяет задатчик размера щели 29 с регулятором 28 размеращели,В регуляторе 28 сигнал, пропорциональный заданному размеру щели сравнивается с текущим значением размеращелй, поступающим от блока 30. Приналичии отклонения регулятор 28 через исполнительный механизм 40 изменяет размер щели в направлении, противоположном указанному рассогласова 1595567 10билки по значениям мощности приводно 20 В данном режиме при увеличении прочности дробимого материала возможен перегруз дробилки, что, в свою очередь, может привести к аварийным ситуациям. Для защиты от них в регулятор 34 вводится ограничение по 45 предельно допустимой мощности. При достижении допустимого значения мощности регулятор 34 резко уменьшает производительность питателя, снижая нагрузку на дробилку.111.Минимизация размера щели при постоянной производительности питателя (контакты 4, 11 и 18 блока 1 замкнуты),Посредством датчика 33, задатчика55 35 и регулятора 34 производительность питателя поддерживается постоянной. При этом осуществляется регулирование размера щели. Через контакты 18 блока го двигателя, уровня материала в дробилке и производительности питателя. Сигналы, пропорциональные мощности, уровню и производительности, преобразуются элементом 80 ввода сигналов постоянного тока (аналого-цифровым преобразователем) и поступают по общей шине в микропроцессорный контрол лер 81 (фиг.2). Последний на основании градуировочной зависимости, коэффициенты которой хранятся в элементе 82 оперативной памяти, рассчитывает - размер щели по текущим значениям 15 мощности, уровня и производительности. Сигнал, пропорциональный размеру щели, посредством элементов 83 и 84 межблочной связи передается далее кблокам 26 и 28 .11.Стабилизация производительности питателя и размера щели при защите от перегруза дробилки по мощности. Блок 1 находится в положении, при котором замкнуты контакты 3, 10 и 17. 25Сигнал от задатчика производительности 35 через контакт 10 поступает на второй вход регулятора 34, где сравнивается с текущим значением производительности, измеренным датчи ком 33. Регулятор 34 вырабатывает управляющее воздействие, приближающее производительность питателя к заданному значению.Размер щели поддерживается также постоянным при помощи задатчика 29, регулятора 28, блока 30 и исполнительного механизма 40. 1 сигнал с второго выхода блока 26 " управления передается ча второй блок регулятора 28 размера щели. Этот сигнал формируется блоком 26 (работа блока 26 подробно описана ниже) по результатам сравнения текущей скорости с ее граничными значениями, выдаваемым блоком 25, и по текущему значению размера щели. Последнее представляется выходным сигналом блока 30.Определение скорости и ее сравнение с граничными значениями осуществляется следующим образом.Выходной сигнал датчика 32 уровня сглаживается фильтром 23, преобразуется дифференциатором 24 в сигнал скорости и поступает на вход компаратора 25. Путем сравнения с отрицательным (нижним) и положительным (верхним) граничными значениями компаратор 25 фактически осуществляет оценку ситуации путем отнесения ее к одному из ее трех описанных выше типов. Компаратор выдает сигнал, условно представляемый одним из трех значений: -1; 1; О (-1 означает, что достигнуто отрицательное граничное значение скорости; 1 - достигнуто положительное граничное значение скорости; 0 - скорость изменения уровня находится в допустимых пределах).В. данном режиме в зависимости от значения сигнала на выходе 25, блок 26 либо уменьшает, либо увеличивает, либо оставляет неизменным задание (уставку) регулятору 28 размеров щели.В общем случае блок 26 осуществляет в зависимости от положения блока 1 переключения, пошаговое изменение либо размера щели (замкнуты контакты 4, 11 и 18), либо производительность питателя (замкнуты контакты 6, 13 и 20).В блок 26 поступают через элемент 61 ввода и элементы 60 и 59 межблочной связи сигналы от датчика 33 производительности, а также от блока 30 вычисления размера щели и компаратора 25, Если сигнал от компаратора 25 равен О, то микропроцессор 62 не выдает сигналов по управлению, При появлении на выходе компаратора ненулевого сигнала, например 1, означающего чрезмерно быстрое увеличение уровня руды, микропроцессор 62 вырабатывает сигналы на увеличение размера щели5567 2заданию по производительности. При отклонении текущего уровня от заданного регулятор 34 вызывает изменение производительности, уменьшающее это или уменьшение производительности питателя. Эти сигналы передаются пофедством элементов 6 6 и 67 межблочнй связи через контакты 18 или 13бтока 1 либо на вход регулятора 28размера щели, либо на вход регулятора3 производительности питателя.Сигналы фактически являются заданиямисистемам регулирования размера щелии, производительности питателя. Задан .я формируются микропроцессором 62с учетом текущего значения размеращ ли или ироизводитепьности питателя,в одимого в блок 26 от блока 30 илидатчика 33. При этом к текущему значению размера щели добавляется, а оттЕкущего значения производительностии тателя отнимается величина соответс вующего шага (величины шагов пор змеру щели и по производительностиф ксированы и хранятся в элементе6 оперативной памяти). Изменение.у азанных значений осуществляетсяш гами (ступенями), длительностьк торых задается интервальными тайм рами 64 и 65, Изменение значенийв одном направлении, т,е, в направлен и только их уменьшения или толькоувеличения производится до тех пор,пОка сигнал на выходе блока 25 не.поменяет знак (не станет равным -1),ПЬсле этого микропроцессор 62 даеткОманду на шаг в обратную сторону,т,е. устанавливает задание, определФнное на предпоследнем шаге, На этомпроцесс выбора управления заканчивается,отклонение. Ч.Максимизация производительности Аналогичным образом блок 26 работает при появлении на выходе компаратора 25 сигнала -1, соответствующего повышенной скорости уменьшения уровня руды, т.е. разгрузки дробилки.01 личие заключается лишь в том, что шаги делаются в сторону уменьшения щЕли или увеличения производительности питателя,.1 Ч.Стабилизация уровня руды и размера щели (контакты 5, 12 и 19 блока 1 замкнуты).В этом положении задатчик 29 связывается с регулятором 28 и система обеспечивает стабилизацию размера щели. Кроме того, сигнал с первого выхода регулятора 27 уровня через контакт 12 блока 1 поступает на второй вход регулятора 34 производительности питателя, Этот сигнал пропорционален Микропроцессор 47 с использованиеминформации, поступающей от элемента48 памяти осуществляет сглаживаниесигнала, вводимого элементом 46 отдатчика 32 уровня, Микропроцессор 51дифференцирует по времени сглаженныйсигнал уровня и передает его черезэлементы 53 и 54 межблочной связина вход микропроцессора 55 компаратора 25 (процедура дифференцирования).Микропроцессор 55 включает в себяблоки сигнум-преобразователей 110,111 и 112,Блок 110 выполняет преобразованиевходного сигнала ц (см. фиг,3) ввыходной 7, по формуле питателя при постоянном размере щели(контакты 6, 13 и 20 блока 1 замкну 1 О ты).Задатчик 29, блок 30 и регулятор28 обеспечивают стабилизацию размеращели. Блок 26 управления по сигналу-1; 1; 0 компаратора 25 на второмсвоем выходе вырабатывает сигнал,который затем через контакт 13 блока1 поступает на второй вход регулятора 34 и вызывает либо пошаговое уве.личение, либо уменьшение производи 20 тельности питателя, либо оставляетего неизменным,Ч 1.Стабилизация уровня руды и производительности питателя (контакты7, 14 и 21 блока замкнуты).Скоммутированные блоком 1 задатчик 35 и регулятор 34 при помощи. датчика 33 обеспечивают стабилизациюпроизводительности. Регуляторы 27и 28 и блок 30 обеспечивают подцер 30 жание заданного уровня материала путем соответствующего изменения размера щели.Л 1.Стабилизация мощности приводного двигателя дробилки и производительности питателя (замкнуты контакты 8, 15 и 22),Стабилизация производительностиосуществляется в соответствии с описанньм. Стабилизация мощности произ -водится путем воздействия регулятора36 на задание регулятору 28 размеращели.-1 при а ( О.Выходной сигнал микропроцессора 55 в зависимости от входного сигнала описывается выражением Чэ= вддп(в 1 Бп(П-Пн)+в 10 п Р-П 6) ),(4) что легко получить из выражения (3) подстановкой в него (1) и (2), т.е. выходной сигнал Ч равен -1 при выходеза нижнюю границу П, 1 при выходе ц за верхнюю границу Пи 0 в том случае, когда ПиППз Выходной сигнал Ч блока 112 че 3 рез элементы 58 и 59 связи поступает на вход микропроцессора 62 блока 26. В микропроцессор 62 сигнал Чэ с элемента 59 поступает на вход блока 113 шагового включения, управляемого таймерами 64 и 65. Блок 113 периодически коммутирует указанный сигнал с входом блока 114 выбора направления шага изменения производительности и шага изменения размера щели. На двух выходах последнего вырабатываются два сигнала Ч и Ч.По логике работы блока 26, если выходной сигнал Ч = -1, т.е, достигнута нижняя граница, то производительность необходимо увеличить, а щель уменьшить. Поэтому в этом случае 7=1, Ч = -1. При Ч =1 блоком 114 выдается 74= -1, Ч= 1. В случае Ч 0 выдается Ч =0 и Ч =О. 3 4 5Блок 115 формирует задание регулятору 34 производительности по выражению Я) Ц+ 4 дОБлок 116 выдает задание регулятору 28 размера щели8= Б + Чь 8 щ 95567 14гдеБ - задания по производительУности и размера щели;й ,Б - текущие значения произвот Тдительности и размера щели",ДОЛЯь, - величина шага по производительности и по размерущели.В цепи управления посредством пере О ключающего блока 1 включаются выходные сигналы блока 115.либо 116.,икропроцессор 69 регулятора 27уровня материала в дробилке включаетв себя два блока 17 и 118, каждый 5 из которых реализует ПИ-закон регулирования по каналам: расход руды -уровень и размер щели - уровень.На входы микропроцессора 69 подаютсясигналы от датчика уровня через элемент 68 ввода и от элемента 70 памяти.Управляющий сигнал с выхода блока117 через элемент 72 связи и соответствующие контакты блока 1 передаетсяна второй вход регулятора 34 производительности, а сигнал с выхода блока 118 через элемент связи 73 и блок1 переключения - на первый вход регулятора 28 размера щели.На первый вход блока 119 микропро цессора 76 подается сигнал Б , пропорциональный текущему размеру щели.На другой вход - сигнал Я , про 3порциональный заданному размеру щели,Блок 19 определяет отклонение 35 ЛВ = 8 - 8.В следующем блоке 20 определяется необходимое число иходов исполнительного механизма регулированияразмера, управляемого специальной 40 электрической схемой, Каждый запусксхемы, осуществляемый аналоговымсигналом, вызывает изменение размера щели на определенную величинух45 Число пи есть необходимое числотаких запусков (ходов) Поступающий от блока 20 на входблока 121 сигнал запускает таймеры 79, который совместно с блоком 121 формирует временную последовательность псигналов. Последние преобразуются элементом вывода в последовательность из и импульсов постоянного тока, вызывающих запуск электрической схемы управления размером щели15 15955 б 7 16 и, раз. Таким образом, размер щелиизменяется на необходимую величиву.Микропроцессор 8 блока 30 осуфествляет расчет размера по эначе 5ниям мощности, уровня руды и производительности питателя поступаюшдмт элемента 80 вывода. Коэффициентыормулы для расчета поступают из.лемента 82 памяти. 1 ОБлок 123 микропроцессора 86 регуятора 34 производительности питатея реализует ПИ-закон регулированияо каналу; скорость вращения приводого двигателя - производительностьитателя, Поскольку скорость вращеия управляется изменением частотыитающего тока, то сигнал с выходалока 123 поступает Мерез элемент 90ыхода частотного сигнала на исполниельный механизм 41. Блок 122 реали.ует ограничение по мощности, защиающее дробилку от перегрузок приезком возрастании прочности дробимоко материала. Текущее ааачеммл мощости, вводимое через контакт 3 блока1 и элемент 88 ввода сигнала постояного тока от датчика 31 мощности,выравнивается с предельным значениеммощности, поступающим в блок 122 из 30Элемента 91 связи с задатчиком 42.Йри достижении текущим значением укаанного предела блок 122 вызываетпрерывание работы блока 123 и уменьшение производительности питателя 45.Микропроцессор 93 регулятора 36мощности реализует ПИ-законы регулирования соответственно по каналам: производительность питателя - мощностьПриводного двигателя дробилки и раз мер щели - мощность.Предлагаемая система управлениядробилкой позволяет полнее учитыватьменяющиеся условия производстван,следовательно, повысить эффективность работы дробильного оборудования с повьшением его производительности на 8-10 Ж. 50 55 Формула изобретения СИстема управления дробилкой, содержащая датчик и задатчик уровня материала в дробилке, задатчик, датчик и регулятор производительности/питателя, выход которого подключен к исполнительному механизму соответСтвующего регулирующего органа, и регулятор размера щели дробилки, выход которого подключен к исполнительному механизму соответствующего регулирующего органа, о т л и ч а ю щ а я с ятем, что, с целью повышения качества управления, она снабжена датчикоммощности электродвигателя дробилки,регулятором мощности электродвигателя дробилки с задатчиком, задатчикомпредельного значения мощности электродвигателя дробилки, сглаживающимфильтром, дифференциатором, компаратором с задатчиком скорости измененияуровня в дробилке, вычислительнымблоком, задатчнком размера щели дробилки, блоком управления, регуляторомуровня материала в дробилке и переключающим блоком, причем датчик мощности электродвигателя дробилки подключен к входу регулятора мощностиэлектродвигателя дробилки и первымвходам вычислительного и переключающего блоков, выходы регулятора мощности электродвигателя дробилки соединены соответственно с вторым итретьим входами переключающего блока,датчик уровня материала в дробилкеподключен к второму входу вычислительного блока, первому входу регуляторауровня материала в дробилке и входусглаживающего фильтра, выход которого через дифференциатор подключен квходу компаратора, выход которогоподключен к первому входу блока управления, выходы которого соединены соответственно с четвертым и пятымвходами переключающего блока, выходвычислительного блока подключен квторому входу блока управления и первому входу регулятора размера щелидробилки, второй вход которого соединен с первым выходом переключающегоблока, задатчик уровня материала вдробилке подключен к второму входурегулятора уровня материала в дробилке, выходы которого соединены соответственно с шестым и седьмым входами переключающего блока, третийвход блока управления подключен кдатчику производительности питателя,который подключен к первому входурегулятора производительности питателя и третьему входу вычислительного блока,.задатчик предельного значения мощности электродвигателя дробилки соединен с вторым входом регулятора производительности пнтателя, третий и четвертый входы которого сое1595567теля и задатчик размера щели дробилки соединены соответственно с остальными входами переключающего блока. 17 динены соответственно с вторым итретьим выходами переключающего блока, задатчик производительности пита 74 75 76 7 И 7 У 36 Я В ГХ
СмотретьЗаявка
4314750, 12.10.1987
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ И ПРОЕКТНЫЙ ИНСТИТУТ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ "МЕХАНОБР", ХАРЬКОВСКОЕ НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ ПО СИСТЕМАМ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ
ПРОЦУТО ВЛАДИМИР СТАНИСЛАВОВИЧ, ЛЕБЕДЕВА ОЛЬГА ИВАНОВНА, ВОРОНОВ ВАЛЕНТИН АНДРЕЕВИЧ, ДИДЕНКО КОНСТАНТИН ИВАНОВИЧ, ПЕРЕКРЕСТОВ АНАТОЛИЙ ГРИГОРЬЕВИЧ, РОЗЕН ЮРИЙ ВЛАДИМИРОВИЧ
МПК / Метки
МПК: B02C 25/00
Метки: дробилкой
Опубликовано: 30.09.1990
Код ссылки
<a href="https://patents.su/10-1595567-sistema-upravleniya-drobilkojj.html" target="_blank" rel="follow" title="База патентов СССР">Система управления дробилкой</a>
Система автоматического регулирования производительности питателя сырого угля

Номер патента: 1114468
Опубликовано: 23.09.1984
Авторы: Дмитриенко, Фрумкин
МПК: B02C 25/00
Метки: питателя, производительности, сырого, угля
...мельницу 1, питатель 2 сырого угля, промежуточный бункер 3 и соединительные газо-пылепроводы.Система автоматического регулирования производительности питателя 2 сырого угля содержит регулятор 4 частоты вращения, вход которого соединен с датчиком 5 частоты вращения питателя 2, а выход связан с исполнительным механизмом - питателем 2. Выход ограничителя 6 температуры сверху соединен с входом селектора 7 максимума; выход ограничителя 8 температуры снизу связан с входом селектора 9 минимума; вход ограничителя 1 О загрузки мельницы соединен с датчиком 11 загрузки мельницы, а выход связан с селектором 9 минимума. Вход ограничителя 12 уровня соединен с датчиком 3 уровня топлива в промежуточном бункере 3, а выход связан с селектором 7...
Способ регулирования мощности блока котел-турбина

Номер патента: 355367
Опубликовано: 01.01.1972
МПК: F01K 7/24
Метки: блока, котел-турбина, мощности
...почти открыты независимо от мощности блока. При набросах нагрузки клапаны перемещаются до верхнего упора, а затем, по мере увеличения давления за котлом, снова занимают свое прежнее положение.Цель изобретения - упрощение способа регулирования мощности блока котел-турбина со скользящим давлением свежего пара, Для достижения этой цели динамический сигнал формируют сравнением положения клапанов части высокого давления турбины и заданного статического положения этих клапанов,На чертеже приведена схема реализации способа. Импульс А датчика 1 положения клапановчасти высокого давления сравнивается в сумматоре 2 с импульсом Б задатчика 8, определяющего положение клапанов в статическом 5 режиме, В статическом режиме выходной импульс В на...
Способ регулирования мощности блока котел-турбина

Номер патента: 478947
Опубликовано: 30.07.1975
Авторы: Бардмесер, Кваша, Сидоров
МПК: F01K 7/24
Метки: блока, котел-турбина, мощности
...1 от датчика 2 изменяется от нуля (при открытом положении клапана на регенерации) до максимума (при закрытом положении клапана), а сигнал 4 от датчика 5 изменяется от нуля до максимума пропорционально мощности генератора.Произведение сигнала положения клапана перед ПВД на сигнал мощности блока характеризует температуру воды за ПВД, соответствующему данному положению клапа на на регенерации при данной нагрузке. Этообъясняется тем, что есть определенная зависимость температуры питательной воды за ПВД от положения клапана на отборе. Эта зависимость будет различной на разных на грузках; умножая положение клапана намощность, фактически можно ввести масштаб, позволяющий распространить эту зависимость на все режимы. Если эта зависимость...
Способ регулирования мощности блока котел-турбина

Номер патента: 478948
Опубликовано: 30.07.1975
Авторы: Бардмесер, Кваша, Сидоров
МПК: F01K 7/24
Метки: блока, котел-турбина, мощности
...приведена схема реализации способа.Схема содержит регулятор топлива 1, датчик вырабатываемой мощности 2, датчик температуры питательной воды 3 и сумматор 4. Регулятор топлива 1, оснащенный трае-(478948 диционными связями 5, в том числе и коррекцией по температуре в пароводяном тракте котла, связан через сумматор 4 с датчиками мощности 2 и датчиком температуры 3, 5 На сумматоре 4 формируется сигнал 6по разности сигналов 7 и 8 после датчика 2 и после датчика 3, Сигнал 6 в статике равен нулю, так как между мощностью блока и температурой питательной воды за подоо гревателем существует линейная зависимость,Сигналы 7 и 8 компенсируют друг друга.В динамике при набросах мощности послеприкрытия клапанов на отборах пара в подо.гревателп высокого...
Способ стабилизации выходной мощности тиристорного регулятора

Номер патента: 881962
Опубликовано: 15.11.1981
Авторы: Большаков, Голубев, Грудкин, Куликов, Пэдуре
МПК: H02P 13/16
Метки: выходной, мощности, регулятора, стабилизации, тиристорного
...Средняя мощность на выходе тирис.торного регулятора, работающего на активнуюнагрузку равна сгде К,= -11 мВ град в (3) значение 15 и К(1+ со 5 с,) Подставим о1 о, - К 13 ь л Оц 6 м У Тогла среднее напряжение на выходе ЮИМ ро нелинейно связано с мощностью Каср (л, п ) Т: К(1+со .),Из (1) следует, что среднее значение мощ ности пропорционально произведению среднего значения тока тиристорного регулятора(или нагрузки) на функцию угла с В.1 где Кр А с.-схема, с вить стаб эпюрь 1 н или- пряорои можно осущости; на фиг,мощью котзацию мощижений.Блок-схлятор, даинтегрируюпуль сныйления. обретения м выходной мощности, работающего на акно которому измеря.ка и длительность импособ стабилизаци иристорного регулятор ивную нагрузку, согл ют...
Предыдущий патент: Дробилка-сепаратор
Следующий патент: Устройство контроля работы отсадочной машины
Случайный патент: Способ определения максимальнодопустимого зазора между тормознымиколодками и барабаном транспортногосредства