Система автоматического управления газотурбинным двигателем
Формула | Описание | Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Формула
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ, содержащая каналы разгона и стабилизации частоты вращения, подключенные к первому и второму входам первого селектора, выход которого соединен с входом интегратора, формирователь программы ограничения расхода топлива и дозатор топлива, отличающаяся тем, что, с целью повышения качества регулирования, оно дополнительно содержит сумматор, управляемый переключатель, логический блок, два элемента сравнения, два формирователя программы дозирования топлива и второй селектор, интегратор выполнен управляемым и имеет управляющий и два дополнительных сигнальных входа, первый из которых соединен с выходом первого элемента сравнения, второй - с выходом второго элемента сравнения, а управляющий вход подключен к выходу логического блока, соединенному с управляющим входом переключателя, выход интегратора соединен с первым входом сумматора, второй вход которого подключен к выходу первого формирователя программы дозирования топлива, соединенному с вычитающими входами первого и второго элементов сравнения, выход сумматора подключен к второму входу переключателя, выход которого связан с дозатором топлива, а первый вход - с выходом второго селектора, соединенным с суммирующим входом второго элемента сравнения, формирователь программы ограничения расхода топлива соединен с суммирующим входом первого элемента сравнения и первым входом второго селектора, второй вход которого соединен с вторым формирователем программы дозирования топлива.
Описание
Известна система автоматического управления (САУ) ГТД, в которой предусмотрено управление несколькими параметрами ГТД с воздействием на расход топлива. Выбор управляющего воздействия производится с помощью селекторов минимальных и максимальных значений сигналов.
Недостатком данной системы является низкое качество регулирования: низкая точность регулирования на малых частотах вращения, большая установившаяся ошибка в режиме разгона.
Наиболее близким техническим решением к предлагаемому является САУ ГТД, содержащая селектор, первый вход которого соединен с выходом канала разгона, второй вход - с выходом канала стабилизации частоты вращения, третий вход - с выходом канала ограничения расхода топлива, входом подключенного к выходу формирователя программы ограничения расхода топлива, а выход через интегратор - с входом дозатора топлива.
Данная система характеризуется низким качеством регулирования, т. е. имеет следующие недостатки:
1) низкая точность управления разгоном ГТД на малых частотах вращения (на малых частотах вращения ГТД обладает большой инерционностью, кроме того, его динамические параметры очень сильно меняются по режиму и по внешним условиям, что делает практически невозможным достижение высокой точности регулирования по замкнутому циклу, которое реализует канал разгона);
2) большая установившаяся ошибка в режиме разгона (канал разгона осуществляет управление производной частоты вращения по отклонению от заданной программы; контур управления производной является статическим, он имеет большую статическую ошибку, существенное уменьшение которой путем увеличения коэффициента передачи, как правило, невозможно из-за снижения запасов устойчивости);
3) низкая точность реализации закона ограничения расхода топлива (канал ограничения расхода топлива осуществляет управление расходом топлива по отключению от заданной программы, при этом для получения информации о расходе топлива используется датчик положения дозирующей иглы; контур ограничения расхода топлива вносит динамическую ошибку, что приводит к понижению точности реализации закона ограничения расхода топлива).
Целью изобретения является повышение качества регулирования.
На чертеже приведена структурная схема предлагаемой системы.
Предлагаемая система содержит первый селектор 1, первым входом связанный с выходом канала 2 разгона, а вторым входом - с выходом канала 3 стабилизации частоты вращения, управляемый интегратор 4, первым сигнальным входом подключенный к выходу первого селектора 1, вторым дополнительным сигнальным входом - к выходу первого элемента 5 сравнения, третьим дополнительным сигнальным входом - к выходу второго элемента 6 сравнения, управляющим входом - к выходу логического блока (ЛБ) 7 и к управляющему входу переключателя 8, а выходом - к первому входу сумматора 9, второй вход которого связан с выходом первого формирователя программы дозирования топлива (ФПДТ) 10, подключенным к вычитающим входам первого 5 и второго 6 элементов сравнения, второй селектор 11, первым входом соединенный с выходом формирователя программы ограничения расхода топлива (ФПОРТ) 12, связанным с суммирующим входом первого элемента 5 сравнения, вторым входом - с вторым ФПДТ 13, а выходом - с суммирующим входом второго элемента 6 сравнения и с первым входом переключателя 8, второй вход которого подключен к выходу сумматора 9, а также дозатор 14 топлива, связанный с выходом переключателя 8.
Система автоматического управления работает следующим образом.
ЛБ 7 реализует логику перехода с разомкнутого контура управления разгоном ГТД второго ФПДТ 13 на малых частотах вращения на замкнутый контур управления канала 2 разгона. В простейшем случае выходной сигнал k ЛБ 7 может выдаваться по следующему закону:
k =
n1 - величина частоты вращения, при достижении которой происходит переход с разомкнутого на замкнутый контур управления.
Переключатель 8 при k= 0 соединяет свой выход с первым входом, а при k= 1 - с вторым входом.
Если ФПОРТ 12 формирует программу ограничения максимального расхода топлива, то второй селектор 11 выполняется как селектор минимума, а интегратор 4 реализует следующий закон формирования выходного сигнала
 1
1 G10 - выходной сигнал первого ФПДТ 10,
Если ФПОРТ 12 формирует программу ограничения минимального расхода топлива, то второй селектор 11 выполняется как селектор максимума, а интегратор 4 реализует следующий закон формирования выходного сигнала
 1
1 Первый селектор 1 представляет собой селектор минимума
z= мин(z1, z2), (6) где z1 - выходной сигнал канала 2 разгона;
z2 - выходной сигнал канала 3 стабилизации частоты вращения.
В простейшем случае z1 - это скоppектиpованное значение разности между заданным и текущим значениями производной частоты вращения ротора турбокомпрессора n,, а z2 - скорректированное значение разности между заданным и текущим значениями частоты вращения n.
Будем считать, что выходной сигнал k ЛБ 7 выдается согласно (1), ФПОРТ 12 формирует программу ограничения максимального расхода топлива, второй селектор 11 представляет собой селектор минимума, а выходной сигнал
На малых частотах вращения (n<n<sub>1) k= 0 и задающее воздействие Go на входе дозатора 14 топлива формируется следующим образом:
G
В соответствии с (7) дозирование топлива на данном участке разгона осуществляется по программе, формируемой вторым ФПДТ 13, ограничиваемой "сверху" программой, которую реализует ФПОРТ 12. При этом согласно (2)
G
В момент достижения частоты вращения n1 сигнал k на выходе ЛБ 7 согласно (1) становится равным единице (k= 1) и переключатель 8 соединяет дозатор 14 топлива с выходом сумматора 9, причем благодаря согласованию начальных условий (8) переключение не влечет за собой нежелательных переходных процессов.
В дальнейшем задающее воздействие Go на входе дозатора 14 топлива формируется по закону
G
Программа первого ФПДТ 10 выбирается так, чтобы выполнялось условие
После переключения интегратор 4 начинает интегрировать сигнал z по закону
Пока z1<z<sub>2, работает каналразгона, дозатор 14 топлива отрабатывает задающее воздействие Go, формируемое в соответствии с (9), и изменяет расход топлива G в сторону уменьшения рассогласования в контуре управления производной частоты вращения канала 2 разгона. При этом с учетом (10) статическая ошибка в контуре управления производной частоты вращения сравнительно мала.
После того как z2 становится меньше, чем z1, система переходит в режим стабилизации частоты вращения.
При работе замкнутых контуров управления ограничение максимального расхода топлива производится путем ограничения сигнала
Сущность изобретения: система автоматического управления содержит два формирователя 10 и 12 программы дозирования топлива второй селектор 11, два элемента сравнения 5 и 6, сумматор 9 и каналы разгона и стабилизации частоты вращения. Дозирование топлива на малых частотах вращения осуществляется по программе второго формирователя 12. Сигнал на втором входе переключателя 8 отслеживает изменение сигнала на его первом входе. В момент достижения частоты вращения n1 перехода на замкнутый контур управления переключение не вызывает переходных процессов. Программа первого формирователя программы дозирования топлива выбирается так, чтобы замкнутый контур управления работал в режиме малых отклонений. Логический блок 7 реализует логику перехода с разомкнутого контура управления разгоном двигателя на замкнутый контур управления. При работе замкнутых контуров управления ограничение максимального расхода топлива производится путем ограничения сигнала
Рисунки
Заявка
4773070/06, 25.12.1989
Уфимское агрегатное конструкторское бюро "Молния"
Распопов Е. В, Перельман В. И, Артамонов И. Г, Ильясов Б. Г, Кабальнов Ю. С, Губайдуллин Г. Г
МПК / Метки
МПК: F02C 9/00
Метки: газотурбинным, двигателем
Опубликовано: 30.04.1994
Код ссылки
<a href="https://patents.su/0-1732734-sistema-avtomaticheskogo-upravleniya-gazoturbinnym-dvigatelem.html" target="_blank" rel="follow" title="База патентов СССР">Система автоматического управления газотурбинным двигателем</a>
Устройство для слежения за несущей частотой

Номер патента: 995339
Опубликовано: 07.02.1983
МПК: H04B 1/06
Метки: несущей, слежения, частотой
...усиливается,преобразуется по частоте и с искажениямивызванными узкополосностью приемника, подается на один из входов фазового детектора 3. Выходной сигнал фазового детектора кольца ФАПЧ, зависящий от частотывходного сигнала, подается на линию 4 задержки, где задерживается на времяазатем фильтруется блоком 5 усреднения,Выходной сигнал фазового детектора 3 также поступает на пороговый формирователь7, выходное напряжение которого равно 1,если отношение сигнал - шум на выходеприемника 1 превышает заданное значение,и равно О, если отношение сигнал - шумна выходе приемника 1 меньше заданногозначения,Блок 8 управления укорачивает поступающие с порогового формирователя видеоимпульсы на время(со стороны перехода импульса из О в 1)....
Устройство для автоматического управления глубиннонасосной установкой малодебитных нефтяных скважин

Номер патента: 1229426
Опубликовано: 07.05.1986
Авторы: Алиев, Костанян, Раджабова, Сухолуцкий, Тер-Хачатуров
МПК: E21B 43/00, F04B 47/00
Метки: глубиннонасосной, малодебитных, нефтяных, скважин, установкой
...их в нулевое состояние.Кроме того, с соответствующеговыхода блока 3 управления подаетсяуправляющий сигнал на суммирующийвход с, реверсивного счетчика 12 площади динамограммы,Таким образом, реверсивный счетчик 12 площади динамограммы, начинаяс момента г. начала хода штанг вверх,осуществляет подсчет импульсов, по 5 12294 ступающих с выхода датчика 1 усилия, Так как частота поступающих импульсов пропорциональна усилию на политрованном штоке, код на выходе Д реверсивного счетчика 12 площади динамограммы в любой момент времени оказывается пропорциональным площади Я;фигуры, ограниченной кривой усилия Р, нулевой линией 0,0 и ординатами ОА и 0; В , соответствующими мо- О ментам временик к Т; (фиг, 2 и 3).Суммирование импульсов в реверсивном...
Генератор равномерно распределенных псевдослучайных величин
Номер патента: 1465954
Опубликовано: 15.03.1989
Авторы: Борисов, Воробьев, Егоров
МПК: H03K 3/84
Метки: величин, генератор, псевдослучайных«, равномерно, распределенных
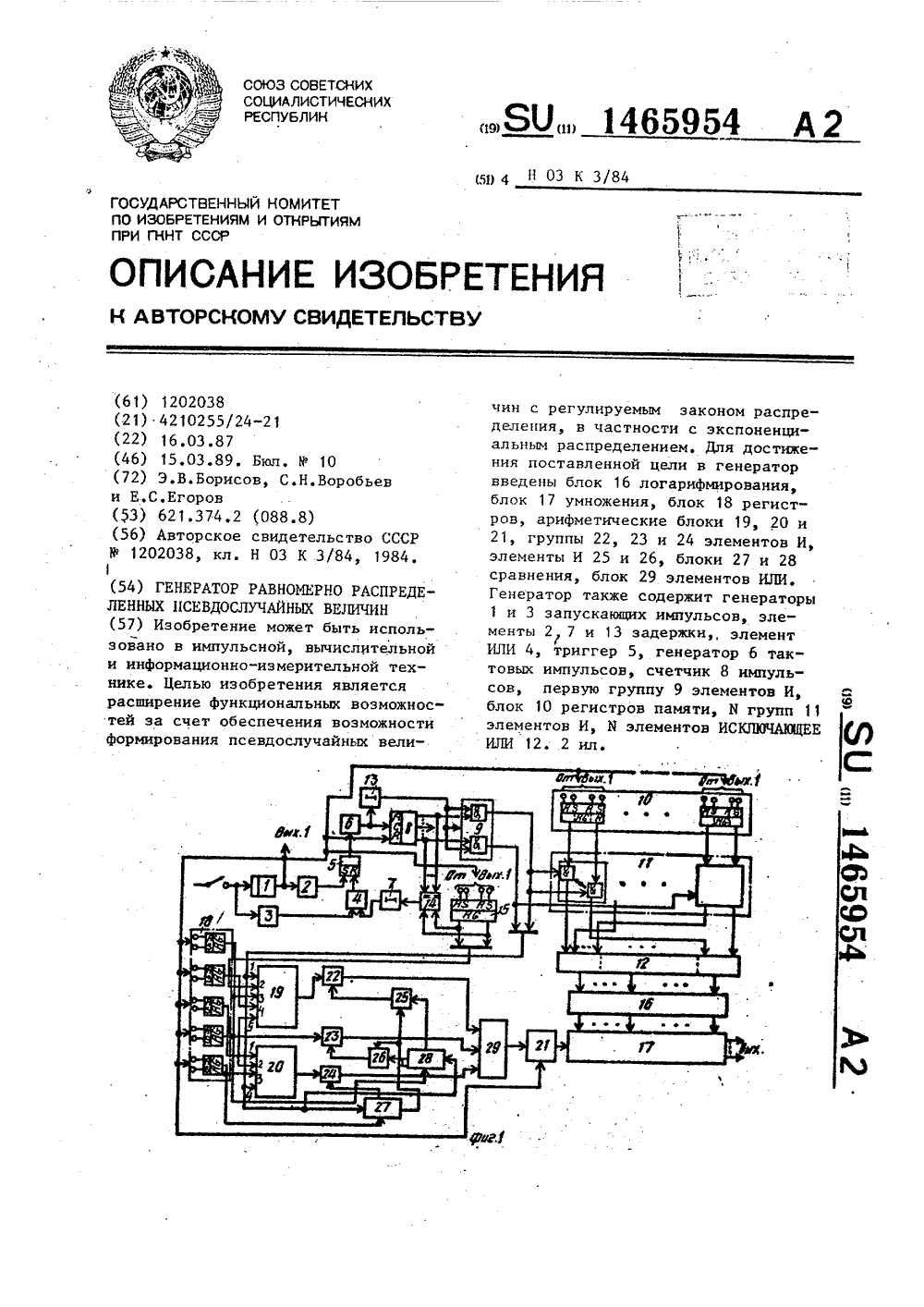
...до 7=2-" .Дляэтогд числа представляются в двоичном коде и установка регистров блока 10 регистров памяти производитсяустановкой триггеров в единичное илинулевое состояние аналогично регистру 15 памяти, Кроме того, импульсс выхода генератора 1 запускающихимпульсов после задержки элементом2 задержки (на время переходных про цессов) подается на вход установкитриггера 5 и устанавливает его в единичное состояние В результате начинает работать генератор б тактовыхимпульсов, сигналы которого поступазо ют на счетный вход счетчика 8 импульсов. Счетчик 8 импульсов формирует номера точек, каждому из которых соответствует определенноесостояние разрядов счетчика. Импульс, 35который был подан на вход счетчика 8 импульсов после задержки в элементе 13...
Устройство сдвига шкалы времени

Номер патента: 1580541
Опубликовано: 23.07.1990
МПК: H03K 5/13
...делителя 1 на +1 период выходного сигнала составит (фиг.З,б)К + 1 1Т = -- -+ - - (6)Ео ЕОПри изменении коэффициента деления делителя 4 на +1 период выходного сиг- нала составит+1 К+1 К+1Т--- + (7)Ео ЕЬКПри одновременном изменении коэффициентов деления делителей 1 и 4 на +1 в течение одного цикла их работы1580541 6ения изменяться Фаза выходного сигнала геменя- нератора ц. Система возвращается в ремен- исходное состояние устойчивого равноко- весия после того, как временной сдвиг5 -. -выходного сигнала генератора 6 составит+19 К или фазоный сдвиг +2 ,К." -- /Временной сдвиг выходного сигнала(8)генератора 6 с большим дискретом мож"но обеспечить, если производить изменя нение коэффициента деления только ододного ного делителя. При...
Устройство для стабилизации частоты вращения электродвигателя постоянного тока

Номер патента: 989726
Опубликовано: 15.01.1983
Авторы: Виноходов, Крутий, Митина, Пионтак, Трусов, Туганов
МПК: H02P 5/06
Метки: вращения, постоянного, стабилизации, частоты, электродвигателя
...при этом первый вход формирователя, 13 соединен с выходом датчика 8,Второй вход - с выходом задающего ге 45нератора 1, а выход формирователя 13 -с вычитаюшим входом реверсивного счетчика 2, инверсный выход задающего генератора 1 соединен с входом делителя 10частоты, один выход которого подключенк входу делителя 11 частоты, а инверсный выход делителя 10 частоты - к входу делителя 12 частоты и к второму входу логического элемента И 9, выход делителя 11 частоты соединен с входомсложения реверсивного счетчика 2, в выход делителя 12 частоты - с вторымвходом триггера 5. 6 4Устройство работает следующим образом.Требуемая скорость электродвигателя 7 постоянного тока задается частотой с выхода делителя 1 1, поступающейна вход сложения...
Предыдущий патент: Стекло для спаивания элементов ферритовых магнитных головок
Следующий патент: Абсолютный измеритель квантовой эффективности фотоприемников
Случайный патент: Двухлучевое интерференционное устройство для измерения толщины прозрачных пленок