Программно-управляемый модуль
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
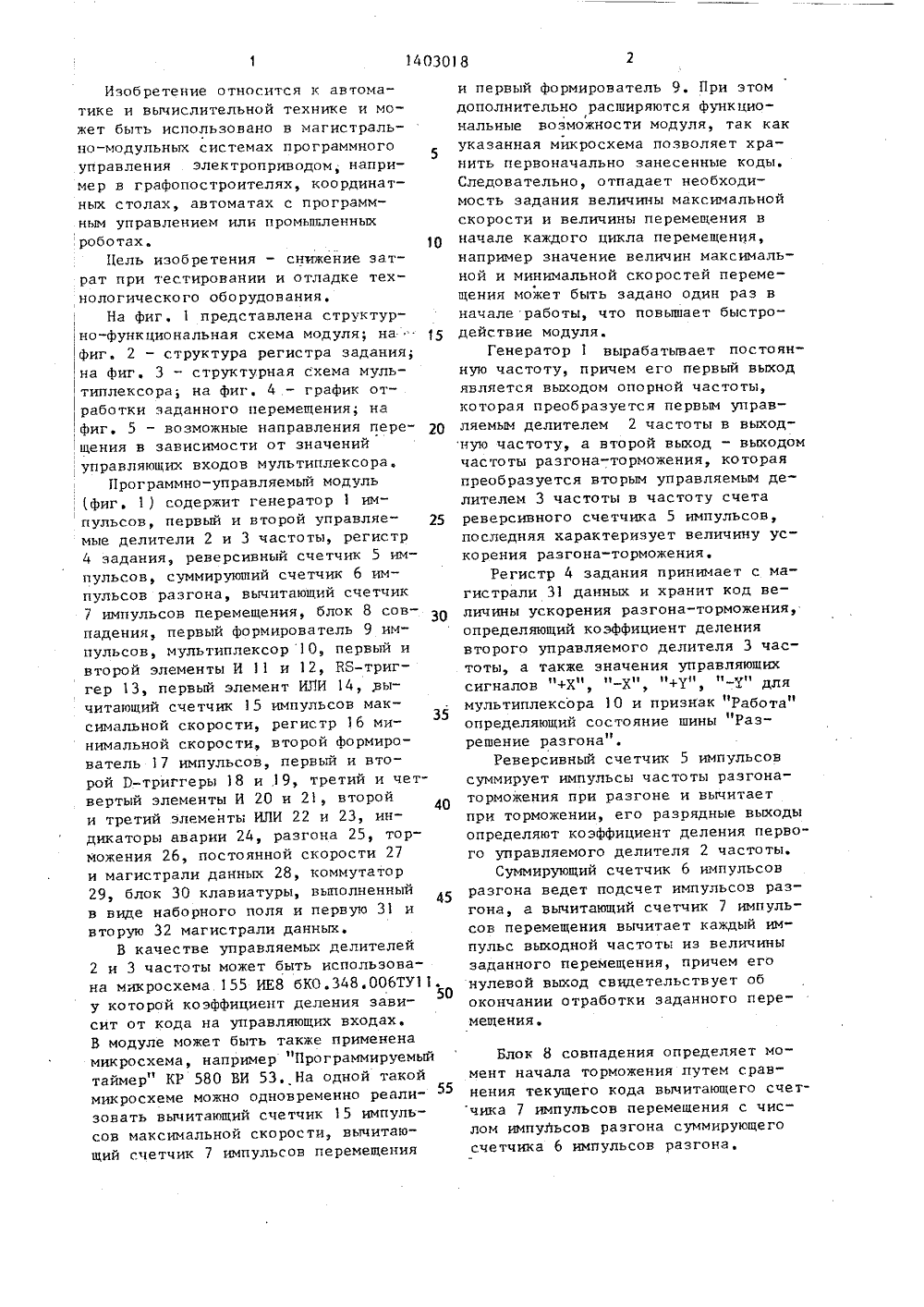
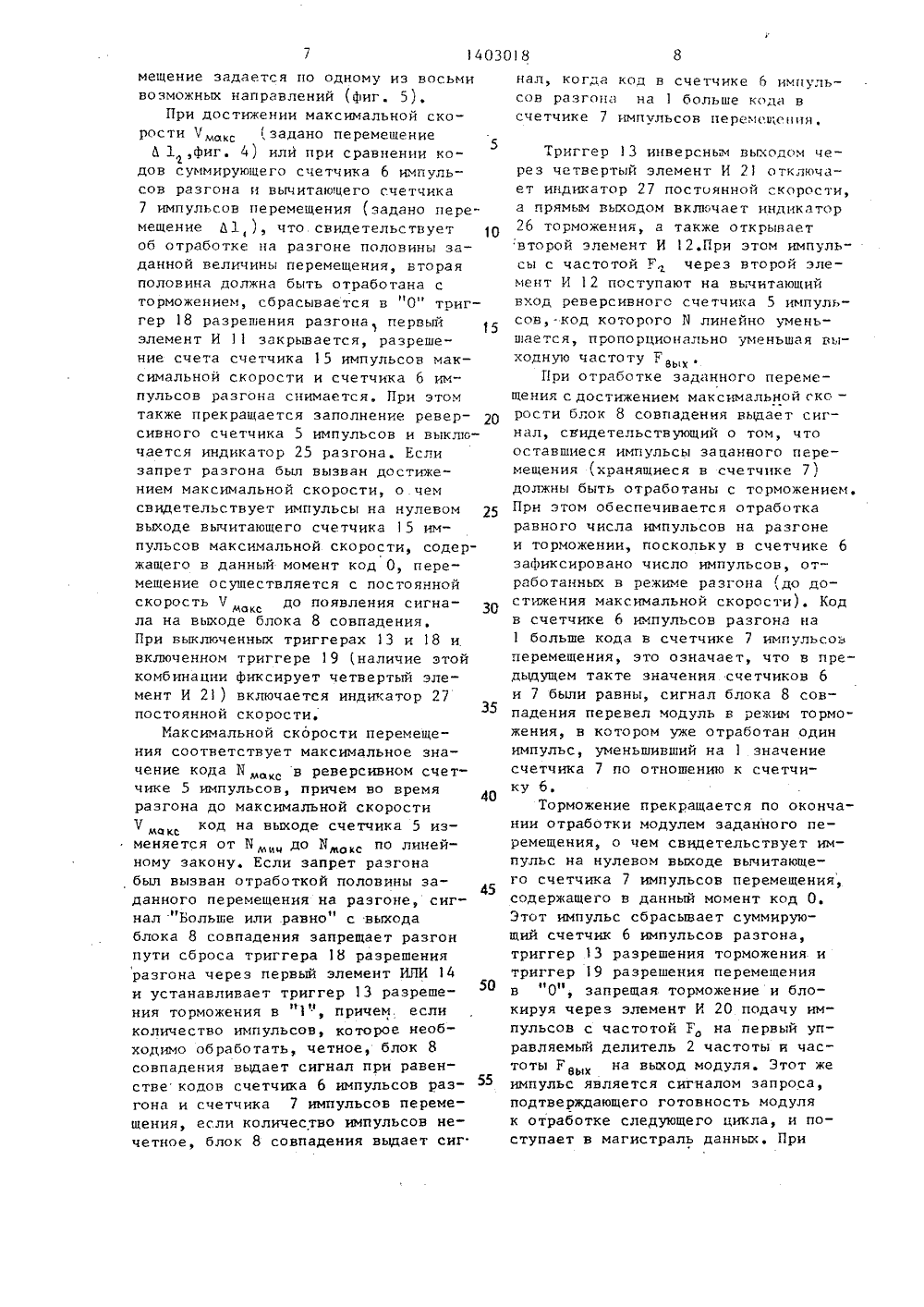
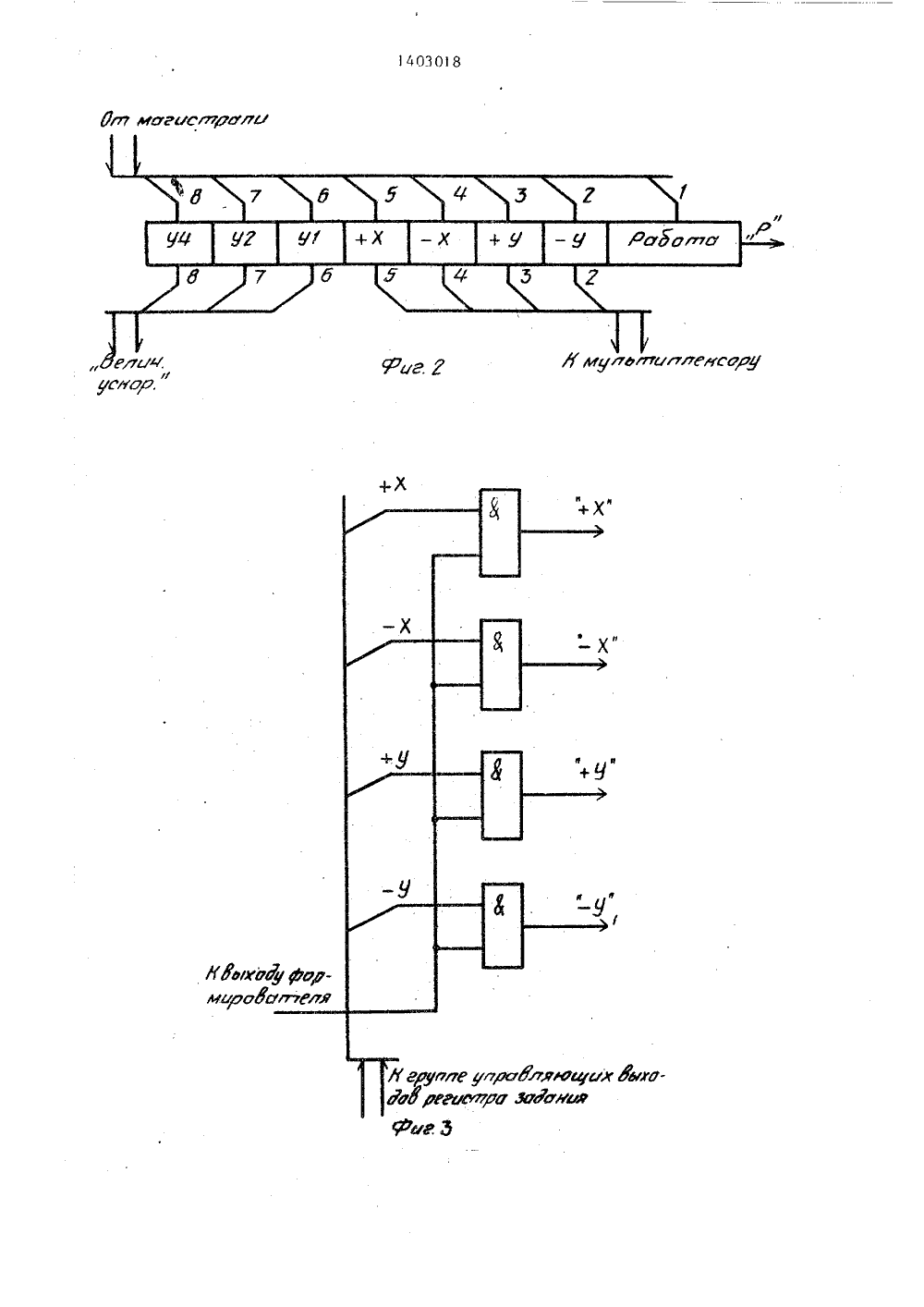
.Н, Яновский8)тельство СССР19/18, 1986 О,и л ОСУДАРСТВЕННЫИ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ 4) ПРОГРАКЮО-УПРАВЛЯЕМЫЙ МОДУЛЬ7) Изобретение относится к автотике и вычислительной технике и может быть использовано в магист рально-модульных системах програ ного управления электроприводом.Целью изобретения является снижениезатрат при тестировании и отладкетехнологического оборудования. Программно-управляемый модуль содержит генератор 1 импульсов, первый 2и второй 3 управляемые делители частоты, регистр 4 задания, реверсивный счетчик 5, суммирующий счетчик 6 импульсов разгона, вычитающий счетчик 7 импульсов перемещения, блок 8 совпадения, первый формирователь 9 импульсов, мультиплексор 1 первый 11 и второй 12 элементы И, ВЯ-триггер 13, первый элемент ИЛИ 14, вычитающий счетчик 15 импчльсов максимальной скорости, регистр 1 минимальной скорости, второй формир ватель 17 импульсов, первый В-триггер 18, третий элемент И 20, второй Р-триггер 19, четвертый элемент И 2 второй 22 и третий 23 элементы ИЛИ индикаторы аварии 24, разгона 25, торможения 26, постоянной скорости 27 и магистрали 28 данных, Преимущество изобретения состоит в расширении функциональных возможностей, овьщении производительности управяемых автоматов и снижении затрат при тестировании и отладке технологического оборудования. 5 ил.35 Изобретение относится к автоматике и вычислительной технике и может быть использовано в магистрально-модульных системах программного5управления электроприводом, например в графопостроителях, координатных столах, автоматах с программным управлением или промышленныхроботах. 1 О1 ель изобретения - снижение затрат при тестировании и отладке техно ло гическо го обо рудов ания,На фиг. 1 представлена структур;но-функциональная схема модуля; на 15фиг. 2 - структура регистра задания;на фиг, 3 - структурная схема мультиплексора; на фиг. 4 - график отработки заданного перемещения; нафиг. 5 - возможные направления перещения в зависимости от значенийуправляющих входов мультиплексора,Программно-управляемый модульфиг. 1) содержит генератор 1 импульсов, первый и второй управляемые делители 2 и 3 частоты, регистр4 задания, реверсивный счетчик 5 импульсов, суммирующий счетчик 6 импульсов разгона, вычитающий счетчик7 импульсов перемещения, блок 8 совпадения, первый формирователь 9 им"пульсов, мультиплексор 10, первый ивторой элементы И 11 и 12, ВБ-триггер 13, первый элемент ИЛИ 14 вычитающий счетчик 15 импульсов максимальной скорости, регистр 16 минимальной скорости, второй формирователь 17 импульсов, первый и второй Р-триггеры 18 и,19, третий и четвертый элементы И 20 и 21, второйи третий элементы ИЛИ 22 и 23, индикаторы аварии 24, разгона 25, торможения 26, постоянной скорости 27и магистрали данных 28, коммутатор29, блок 30 клавиатуры, выполненныйв виде наборного поля и первую 31 ивторую 32 магистрали данных,В качестве управляемых делителей2 и 3 частоты может быть использована микросхема 155 ИЕ 8 бК 0.348,006 ТУ 11.50у которой коэффициент деления зависит от кода на управляющих входах,В модуле может быть также примененамикросхема, например "Программируемыйтаймер" К 1 580 ВИ 53. На одной такоймикросхеме можно одновременно реализовать вычитающий счетчик 15 импульсов максимальной скорости, вычитающий счетчик 7 импульсов перемещения и первый формирователь 9. При этомдополнительно расширяются функциоГнальные возможности модуля, так какука з анна я микросхема по з вол яе т хранить первоначально занесенные коды.Следовательно, отпадает необходимость задания величины максимальнойскорости и величины перемещения вначале каждого цикла перемещения,например значение величин максимальной и минимальной скоростей перемещения может быть задано один раз вначале работы, что повышает быстродействие модуля.Генератор 1 вырабатывает постоянную частоту, причем его первый выходявляется выходом опорной частоты,которая преобразуется первым управляемым делителем 2 частоты в выходную частоту, а второй выход - выходомчастоты разгона-торможения, котораяпреобразуется вторым управляемым делителем 3 частоты в частоту счетареверсивного счетчика 5 импульсов,последняя характеризует величину ускорения разгона-торможения.Регистр 4 задания принимает с магистрали 31 данных и хранит код величины ускорения разгона-торможения,определяющий коэффициент делениявторого управляемого делителя 3 частоты, а также значения управляющихмультиплексора 10 и признак "Работа"определяющий состояние шины "Разрешение разгона",Реверсивный счетчик 5 импульсовсуммирует импульсы частоты разгонаторможения при разгоне и вычитаетпри торможении, его разрядные выходыопределяют коэффициент деления первого управляемого делителя 2 частоты.Суммирующий счетчик б импульсовразгона ведет подсчет импульсов разгона, а вычитающий счетчик 7 импульсов перемещения вычитает каждый импульс выходной частоты из величинызаданного перемещения, причем егонулевой выход свидетельствует обокончании отработки заданного перемещения. Блок 8 совпадения определяет момент начала торможения путем сравнения текущего кода вычитающего счетчика 7 импульсов перемещения с числом импульсов разгона суммирующего счетчика б импульсов разгона, 14030Первый формирователь 9 формирует выходные импульсы с заданными параметрами, например длительностью.Мультиплексор 10 в зависимости от значений управляющих выходов выдает импульсы выходной частоты на один из выходов +Х, -Х, +У, -У, или на одну из пар выходов (+Х, -Х), (+Х, -У), (-Х, -У) и (-Х, +У)., Первый и вто рой элементы И 11 и 12 разрешают счет реверсивного счетчика 5 импульсов соответственно при разгоне или торможении. ВЯ-триггер 13 управляет разрешением торможения, а первый эле мент ИЛИ 14 сбрасывает первый В-триггер 18 управляющий разрешением разгона, запрещая разгонВычитающий счетчик 15 импульсов максимальной скорости вычитает каждый импульс 20 частоты разгона-торможения из кода, соо тве тс твующего максимальной величине скорости, его нулевой выход свидетельствует о достижении максимальной величины скорости. 25 Регистр 16 минимальной скоростихранит значение кода, соответствующее минимальной скорости перемещения,а также передает его значение на ре- З 0версивный счетчик 5 импульсов. ВторойТ 1-триггер 19 управляет разрешениемперемещения, т.е, разрешением прохождения через третий элемент И 20импульсов опорной частоты на тактовый вход первого управляемого дели-,теля 2 частоты при выдаче признакаотработки заданного перемещения вто"рым формирователем 17,Формирователи 9 и 17 предназначены для формирования коротких прямоугольных импульсов, причем длительность импульсов на выходе формирователя. 17 должна обеспечивать устойчивую работу программно-управляемого 45модуля и определяется, в основном,временными характеристиками используемой элементной базы, а длительность импульсов на выходе формирователя 9 определяется характеристиками управляемого электропривода,Четвертый элемент И 21 управляетиндикатором 27 постоянной скорости,индикация которого свидетельствует оперемещении с постоянной скоростьюпри наличии следующих логическихусловий: разрешение перемещения,запрет разгона и запрет торможения.Второй элемент ИЛИ 22 управляет ин 184дикатором 24 аварии, индикация которого свидетельствует о срабатыванииодного из концевых выключателей +Х,-Х, +У или -У, т.е. об аварийной си-туации. Третий элемент ИЛИ 23 управляет запретом перемещения при возникновении аварийной ситуации илив случае нормального завершения заданного перемещения.При перемещении с разгоном включен индикатор 25 разгона, а при перемещении с торможением - индикатор26 торможения, Индикатор 28 магистрали"данных индицирует состояниемагистрали данных. Коммутатор 29подключает магистраль данных магист/рали модуля при управлении от ЗВМили к блоку 30 клавиатуры при Ручном управлении.Программно-управляемый модуль работает следующим образом,Перед началом работы модуль(фиг. 1) устанавливается в исходноесостояние.В начале цикла из магистрали 31данных или блока 30 клавиатуры ( в зависимости от положения кнопки "Ручной - Автомат" ) через коммутатор 29заполняется регистр 4 задания (фиг. 2)куда заносится код величины ускоренияразгона-торможения, значения управляющих входов мультиплексора 10(фиг. 3) в зависимости от требуемогонаправления перемещения и признак"Работая ЯвлЯющийсЯ пУском модУлЯ,а также в вычитающий счетчик 7 импульсов перемещения заносится код величины требуемого перемещения в вычитающий счетчик 15 импульсов максимальной скорости, - код величинымаксимальной скорости перемещения ив регистр 16 минимальной скорости -код величины минимальной скорости.Занесение информации в регистр 4задания должно производиться послезанесения информации в счетчик 7импульсов перемещения, счетчик 15импульсов максимальной скорости ирегистр 16 минимальной скорости,так как с появлением "1" в разрядепроисходит пуск модуля,В первоначальный момент, до установления в "1" признака "Работа"в регистре 4 задания, выходы триггеров 13, 18 и 19 установлены в "0"и, следовательно, запрещена подачаимпульсов соответственно на вычитающий и суммирующий входы реверсив ного счетчика 5 и на вход первого управляемого делителя 2.На тактовые входы первого и второго управляемых делителей 2 и 3 частоты подается соответственно опорная частота 1" через третий элемент И 20 максимально допустимая часто"- та на выходе модуля) и частота разгона-торможения Р, (максимально"допустимая частота, соответствующая максимальному ускорению разгона-торможения модуля).Выходные частоты Ро и 1" являются независимыми, поскольку обеспечивают независимые параметры: Р - скорость перемещения электропривода, Р, - величину ускорения при разгоне-торможении. При этом частота Г выбирается по максимально допустимой 2 О , скорости перемещения электроприво да и равна максимально допустимой частоте на координатных выходах модуля, а частота Г 1 - по максимально допустимой величине ускорения раз гона-торможения,Частота импульсов на выходах управляемых делителей частоты определяется коэФФициентом деления - кодом, поступающим на их управляющие ЗП входы. Частоты нмпульсон на вы.ходе второго управляемого делителя 3 частоты- код, соответствующий заданному ускорению разгонатомрожения поступающий из регистра 4 задания на управ-ляющие входы делителя 3 частоты,Импульсы с постоянной частотойР , соответствующей заданному ускорению поступают на первые входы первого и второго элементов И 11 и 12.и иПри установлении признака Работарегистра 4 задания в "1" второй формирователь 17 Формирует короткийимпульс, который перезаписывает зна 50чение минимальной скорости перемещения из регистра 16 минимальной скорости в реверсивный счетчик 5. Позаднему Фронту этого импульса происходит установка триггеров 18 и 19в "1". При этом триггер 18 включаетиндикатор 25 разгона, а также открывает первый элемент И 11. Частота,соответствующая коду величины ускоренин разгона-торможения, т.е. коэфФициенту деления второго управляемого делителя 3 частоты, подается насуммирующий вход реверсивного счет"чика 5 импульсов,Импульсы на суммирующий вход реверсивного счетчика 5 будут поступать до тех пор, пока из первого элемента ИЛИ 14 не поступит сигнал сброса разрешения разгона, т,е, сбросатриггера 18, который также разрешитсчет суммирующему счетчику 6 импульсов разгона и вычитающему счетчику15 импульсов максимальной скорости.Таким образом, в суммирующем счетчике 6 импульсов разгона будет храниться инФормация о количестве им-,1пульсов, поступающих на вход модуляза время разгона. Эти же импульсыпоступают на вычитающий счетчик 7импульсов перемещения, где всегдахранится количество импульсов, которое необходимо отработать до завер"шения цикла.Одновременно с заполнением реверсивного счетчика 5 происходит вычитание с этой же частотой вычитаю- щего счетчика 15 импульсов максимальной скорости.Включенный триггер 19 открывает третий элемент И 20 разрешая подачу частоты Г, на вход первого управляемого .делителя 2 частоты, на управляющие входы которого поступает текущий код числа И реверсивного счетчика 5 импульсовСледовательно, выходная частота будет изменять" ся пропорционально числу Б При этом траектории разгона и торможения максимально приближены к естественным траекториям разгона и торможения электроприводов, обеспечивая оптимальность управления.Импульсы выходной частоты Р , Формируются первым Формирователем 9 импульсов, с выхода которого с заданной длительностью, например 0,5 мкс, поступают на вход мультиплексора 10 Фиг. 3). СФормированные импульсы выходной частоты коммутируются в мультиплексоре 10 в соот" ветствии со значениями управляющих входов, определенными регистром4 задания Фиг. 2). При этом пере 1 ДО 3085 1 О 15 20 25 30 35 40 45 50 55 мещение задается по одному из восьмивозможных направлений (фиг5),При достижении максимальной скорости Чмок (задано перемещениеЬ 1 ,фиг. 4) илй при сравнении кодов суммирующего счетчика 6 юпульсов разгона и вычитающего счетчика7 импульсов перемещения (задано перемещение Ь 1,), что свидетельствуетоб отработке на разгоне половины заданной величины перемещения, втораяполовина должна быть отработана сторможением, сбрасывается в "О" триггер 18 разрешения разгона, первыйэлемент И 11 закрывается, разрешение счета счетчика 15 импульсов максимальной скорости и счетчика б импульсов разгона снимается, При этомтакже прекращается заполнение реверсивного счетчика 5 импульсов и выключается индикатор 25 разгона. Еслизапрет разгона был вызван достижением максимальной скорости, о.чемсвидетельствует импульсы на нулевомвыходе вычитающего счетчика 15 импульсов максимальной скорости, содержащего в данный момент код О, перемещение осушествляется с постоянной скорость Ч до появления сигнамоксла на выходе блока 8 совпадения,При выключенных триггерах 13 и 18 и.включенном триггере 19 (наличие этой комбинации фиксирует четвертый элемент И 21) включается индикатор 27постоянной скорости.1 аксимальной скорости перемещения соответствует максимальное значение кода И в реверсивном счетчике 5 импульсов, причем во времяразгона до максимальной скорости7 код на выходе счетчика 5 изменяется от 1 м до 1 мпо линейному закону. Если запрет разгона был вызван отработкой половины заданного перемещения на разгоне, сигнал Больше или равно" с выхода блока 8 совпадения запрещает разгон пути сброса триггера 18 разрешения разгона через первый элемент ИЛИ 14 и устанавливает триггер 13 разрешения торможения в "1", причем. если количество импульсов, которое необходимо обработать, четное, блок 8 совпадения выдает сигнал при равенстве кодов счетчика 6 импульсов разгона и счетчика 7 импульсов перемещения, если количество импульсов нечетное, блок 8 совпадения выдает сиг нал, когда код в счетчике б импульсов разгона на 1 больше кода всчетчике 7 импульсов перемещения,Триггер 3 инверсным выходом через четвертый элемент И 21 отключа - ет индикатор 27 постоянной скорости, а прямым выходом включает индикатор 26 торможения, а также открывает второй элемент И 12.При этом импульсы с частотой Г через второй элемент И 12 поступают на вычитающий вход реверсивного счетчика 5 импульсов,-код которого 1 линейно уменьшается, пропорционально уменьшая выходную частоту Рвь,.При отработке заданного перемещения с достижением максимальной ско - рости бгок 8 совпадения выдает сигнал, свидетельствующий о том, что оставшиеся импульсы запанного перемещения (хранящиеся в счетчике 7) должны быть отработаны с торможением, Прн этом обеспечивается отработка равного числа импульсов на разгоне и торможении, поскольку в счетчике 6 зафиксировано число импульсов, отработанных в режиме разгона (до достижения максимальной скорости). Код в счетчике 6 импульсов разгона на 1 больше кода в счетчике 7 импульсов перемещения, это означает, что в предыдущем такте значения счетчиков 6 и 7 были равны, сигнал блока 8 совпадения перевел модуль в режим торможения, в котором уже отработан один импульс, уменьшивший на 1 значение счетчика 7 по отношению к счетчику 6.Торможение прекращается по окончании отработки модулем заданного перемещения, о чем свидетельствует импульс на нулевом выходе вычитающего счетчика 7 импульсов перемещения, содержащего в данный момент код О. Этот импульс сбрасывает суммирующий счетчик 6 импульсов разгона, триггер 13 разрешения торможения и триггер 19 разрешения перемещения в 0, запрещая торможение и блокируя через элемент И 20 подачу импульсов с частотой Р на первый управляемый делитель 2 частоты и частоты Гвна выход модуля. Этот жевьаимпульс является сигналом запроса, подтверждающего готовность модуля к отработке следующего цикла, и поступает в магистраль данных, Присбросе триггера 13 выключается индикатор 28 торможения.Если в процессе отработки перемещения из-за неправильного задания5координат, сбоя или других причиндвухкоординатный манипулятор достигнет одного из четырех возможныхкрайних положений, о чем будет свидетельствовать сигнал на выходе второго элемента ИЛИ 22, включится индикатор 24 аварии и через третийэлемент ИЛИ 23 сбросится триггер 19разрешения перемещения, запрещая подачу импульсов выходной частоты Г, на выход модуля.Так заканчивается цикл отработкимодулем заданного перемещения, В результате модуль находится в следую щем состоянии: суммирующий счетчик; 6 импульсов разгона и вычитающиисчетчик 15 импульсов максимальнойскорости сброшены в 0", триггеры13, 18 и 19, разрешающие режимыработы модуля, - "С", безразличносостояние реверсивного счетчика 5,так как в начале каждого цикла происходит перезапись содержимого регистра 16 минимальной скорости вэтот счетчик,30Таким образом, модуль готов к приему нового задания на перемещение.Задавая в регистр 16 минимальнойскорости различные коды, можно менять величину скорости, с которой начинается отработка двигателем заданной величины перемещения, т.е.можно производить оптимизацию динамических характеристик управляемыхэлектромеханических приводов. 40 Блок 3 клавиатуры имеет наборкнопок, воспроизводящих все сигналы магистрали, и отключается в режиме "Автомат". При этом магистраль модуля подключается к магистрали данных через коммутатор 29. В режиме "Ручной" коммутатор 29 отключает магистраль модуля и подключает к магистрали данных блок 30 клавиа 50 туры, с помощью которого можно производить запись информации в необходимые регистры и счетчики с контролем записываемой информации на индикаторе 28, а также чтение записанной информации на любого регистраили счетчика,Коммутатор 29 коммутирует двунаправленные шины магистрали модуля к магистрали данных и однонаправленныешины блока 30 клавиатуры.Предлагаемый программно-управляемый модуль реализует принципиальноновый способ организации перемещенияэлектропривода с разгоном и торможением, в котором наряду с возможностью программирования или задания снаборного поля модуля) величин ускорЕния разгона-торможения, максимальной и минимальной скорости переме -щения, а также отработки аварийныхситуаций, автоматически определяется момент начала торможения на основе контроля унитарного кода, которыйформируется с выходной частотой модуля, причем в случае безаварийнойотработки заданного перемещения последний импульс заданного перемещения является также последним импульсом торможения.Функциональные возможности предлагаемого модуля по сравнению с известным расширены примерно на 503за счет программирования величиныминимальной скорости перемещения,индикации режимов работы модуля и отработки аварийных ситуаций,Производительность управляемыхавтоматов повысилась примерно на207 вследствие оптимизации динамических характеристик, в том числевеличины минимальной скорости перемещения,Затраты при тестировании и отладке технологического оборудованияснизились на 257 за счет ручного управления и индикации режимов работымодуля.В результате обеспечивается повышение эффективности магистральномодульных систем программного управления электроприводом, например вграфопостроительных, координатныхстолах, станках с программным управлением или промышленных роботах, атакже функционирование оборудованияс программным управлением и вычислительной техники в целом. Формула изобретенияПрограммно-управляемый модуль, содержащий генератор импульсов, первый и второй элементы И, ВЯ-триггер, первый элемент ИЛИ, первый и второй управляемые делители частоты, управляющие входы которых соединены соответственно с первыми информационны4030 82мй выходами реверсивного счетчикаимпульсов и регистра задания, вторые информационные выходы регистразадания соединены с управляющими входами мультиплексора, тактовый входкоторого соединен с выходом первогоформирователя импульсов, первые ивторые информационные входы блокасовпадения соединены соответственно 1 Ос информационными выходами суммирующего счетчика импульсов разгона ивычитающего счетчика импульсов перемещения, выход нуля которого соединен с шиной "Конец работы", выходнуля вычитающего счетчика импульсовмаксимальной скорости соединен с первым входом первого элемента ИЛИ, информационные входы регистра заданиясоединены с первой магистралью данных, с которой также соединены информационные входы вычитающих счетчиков импульсов перемещения и максимальной скорости, первые входы первого и второго элементов И соединены 25с выходом второго управляемого делителя частоты, второй вход второгоэлемента И соединен с прямым выходомВЯ-триггера, выходы первого и второгоэлементов И соединены соответственно ЗОс суммирующим и вычитающим входамиреверсивного счетчика импульсов, вы-.ход первого делителя частоты соединен с входом первого формирователя импульсов, о т л и ч а ю щ и йс я тем, что, с целью снижения затрат при тестировании и отладке технологического оборудования, в неговведены вторая магистраль данных,регистр минимальной скорости, второйформирователь импульсов, первый ивторой В-триггеры, третий и четвертый элементы И, второй и третий элементы ИЛИ, первый - пятый индикаторы,, коммутатор и блок клавиатуры, информационные выходы которого соединены с первыми информационными входами коммутатора, вторые информационные входы которого соединены с второй магистралью данных, коммутируемые входы коммутатора и первый индикатор соединены с первой магистралью данных, первый и в то рой входытретьего элемента И соединены соответственно с первым выходом генератора импульсов, первым входом четвертого элемента И и прямым выходомпервого Р-триггера, выход третьегоэлемента И соединен с входом первого управляемого делителя частоты,второй и третий входы четвертогоэлемента И соединены с инверснымивыходами соответственно второгоР-триггера и ВЯ-триггера, выход четвертого элемента И соединен с вторымцндижатором, входы сброса первого ивторого В-триггеров соединены соответственно с выходом второго элемента ИЛИ и выходом первого элементаИЛИ, прямой выход второго Л-триггера соединен с входом разрешения счета вычитающего счетчика импульсовмаксимальной скорости, вторым входомпервого элемента И, третьим индикатором и входом разрешения счета суммирующего счетчика импульса разгона,С-входы первого и второго В-триггеров соединены с управляющим входомреверсивного счетчика импульсов ичерез второй Формирователь импульсов с выходом регистра задания,0-входы первого и второго Э-тригегеров постоянно соединены с шинойуровня логической единицы, выходвторого управляемого делителя частоты соединен с вычитающим входом счетчика импульсов максимальной скорости,Я-вход ВЯ-триггера соединен с вторымвходом первого элемента ИЛИ и выходом блока совпадения, В-вход ВЯ-триггера соединен с первым входом второгоэлемента ИЛИ и шиной "Конец работы",прямой выход ВЯ-триггера соединен свходом четвертого индикатора, второйвход второго элемента ИЛИ соединенс входом пятого индикатора и выходомтретьего элемента ИЛИ, входы которогосоединены с соответствующими входамипрограммно-управляемого модуля, входрегистра минимальной скорости соединен с первой магистралью данных, авыходы " с информационными входамиреверсивного счетчика импульсов.1 403018 оставитель А, Прусковцов Техред А, Кравчук Корректор С, Шекмар А. Лежнина Реда Подписнкомитета СССи открытийкая наб Тираж 866 ВНИИПИ Государственного по делам изобретений 113035, Москва, Ж, Рауш
СмотретьЗаявка
4103878, 04.08.1986
ПРЕДПРИЯТИЕ ПЯ Р-6668
ЦЫМБАЛ ВАЛЕРИЙ НИКОЛАЕВИЧ, ЯНОВСКИЙ ВАСИЛИЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: модуль, программно-управляемый
Опубликовано: 15.06.1988
Код ссылки
<a href="https://patents.su/9-1403018-programmno-upravlyaemyjj-modul.html" target="_blank" rel="follow" title="База патентов СССР">Программно-управляемый модуль</a>
Устройство для измерения скорости изменения частоты

Номер патента: 859941
Опубликовано: 30.08.1981
МПК: G01R 23/00
Метки: изменения, скорости, частоты
...первогоимпульса па выходе счетчика 2 появляется импульс, ксторий проходит на вход частотомерапериодомсра 3 и па вход генератора 4 парныхимпульсов, на выходе которого появляетсяпачка из двух импульсов. Опа поступает навход счетчика 5, так что в нем будет записа.но теперь число 3, которое переписывается че.рез цепь 6 в счетчик 2 (фиг. 2 в и г на выходе счстчика 2 и генератора 4 парных импульзосов).Таким образом, второй импульс на входечастотомера-периодомера 3 появится на 4-ыйимпульс входной последовательности (1+ 3 = 4).Он снова запустит генератор 4 парных импульсов, добавив в счетчик 5 еще 2 импульса, такчто в нем будет занисано число 5, котороеопять переписыьаегся в счетчик 2 через цепь 6переписи кода,Следовательно, после...
Устройство для измерения скорости изменения частоты

Номер патента: 1068830
Опубликовано: 23.01.1984
Авторы: Гусенко, Каршаков, Мокров
МПК: G01R 23/00
Метки: изменения, скорости, частоты
...- низкая точность измерения, 0Цель изобретения - повышение точности измерения скорости изменения частоты.Цель достигается тем что в устройство для измерения скорости изменения частоты, введены последовательно соединенные третий ключ и третий счетчик, второй вход которого подключен к выходу блока считывания, при этом выход третьего счет-, чика соединен с выходом дополнитель" ного счетчика импульсов и с первым входом третьего ключа, второй вход которого подключен к выходу генератора опорной частоты.На чертеже приведена функциональ ная схема предлагаемого устройства. та, вход которого соединен с выходом ключа 7 и выходом дополнительного счетчика 4, третий дополнительный счетчик 11 и третий дополнительный ключ 12. Емкость третьего...
Устройство для измерения девиации и скорости изменения частоты в течение импульса

Номер патента: 652500
Опубликовано: 15.03.1979
Автор: Волин
МПК: G01R 23/00
Метки: девиации, изменения, импульса, скорости, течение, частоты
...длительности есслецуемого импульса, а средняя 26скорость изменения частоты - в течениеимпульса,Следовательно, известное устройство- не обеспечивает достаточной точности измерения девиации частоты, . ИЦель изобретения - повьпоение гочноотй"йзмеренея девиации е скорости -измене-.нйя частоты в течение импульса.Для этого в устройстве, содержащемпоследовательно соединенные модулятор,управляемый генератор, линию задержкие смеснтель, второй вход которого подключенк выходу управляемого генератора, генератор стробирующнх импульсов,введены рбглеруемый элемент задержке Ии последовательно соединенные вентиль,умножегель частоты е счетчик числа им-пульсов, причем первый вход вентиля подключен к выходу смесителя, а второй входсоединен через...
Устройство для управления скоростью перемещения магнитной ленты

Номер патента: 1427420
Опубликовано: 30.09.1988
Авторы: Артамонова, Вешняков, Толочка, Улдукис
МПК: G11B 15/46
Метки: ленты, магнитной, перемещения, скоростью
...к форсированному разгону ведущего вала 3, начинающего ускоренно протягивать магнитную ленту 4. При этом сигнал частотного таходатчика 18 начинает поступать на фазовый регулятор 6 скорости, который формирует импульсы, проходящие на второй ключ 17, начинающий работать в режиме отсечки-насыщения, Второй клон 17 за счет воздействия на второй резистор 10, образующий совместно с первым резистором 9 делитель напряжения, по- ступающего с шины 14 источника напряжения формирует через диод 1 на вхо 1427де фильтра 8 нижних частот последовательность отрицательных импульсов с возрастающей частотой. Фильтр 8 нижних,частот вырабатывает из этой по. -5 следовательности импульсов постепенно возрастающее отрицательное напряжение, которое плавно переводит...
Устройство для измерения девиации и скорости изменения частоты в течении импульса

Номер патента: 1575127
Опубликовано: 30.06.1990
МПК: G01R 23/00
Метки: девиации, изменения, импульса, скорости, течении, частоты
...через нуль преобразованного сигнала Б (фиг.2 г). Число К им пульсов эталонного генератора 20, подсчитанных вторым счетчиком 14 импульсов в каждый полупериод преобразованного сигнала разностной частоты Й , записывается в запоминающийарфрегистр 15 по приходе каждого импульса с выхода четвертого элемента И 18 на второй вход регистра 15, Необходимость второй, линии 16 задержки вызвана тем, чтобы согласовать процессы записи информации с выхода второго счетчика 14 импульсов в запоминающий регистр 15 по сигналу 0 (Фиг.2 м)11 и установить в исходное состояние счетчик 14. Время задержки линии 16 определяется минимальной длительностью процесса записи информации в регистр 15. По окончании импульса строба 11 (фиг.2 з) в запоминающем...
Предыдущий патент: Способ параметрической компенсации циклических погрешностей привода подач станка с чпу
Следующий патент: Способ определения состояния контактов контактной группы
Случайный патент: 156988