Система автоматического управления загрузкой бункеров
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
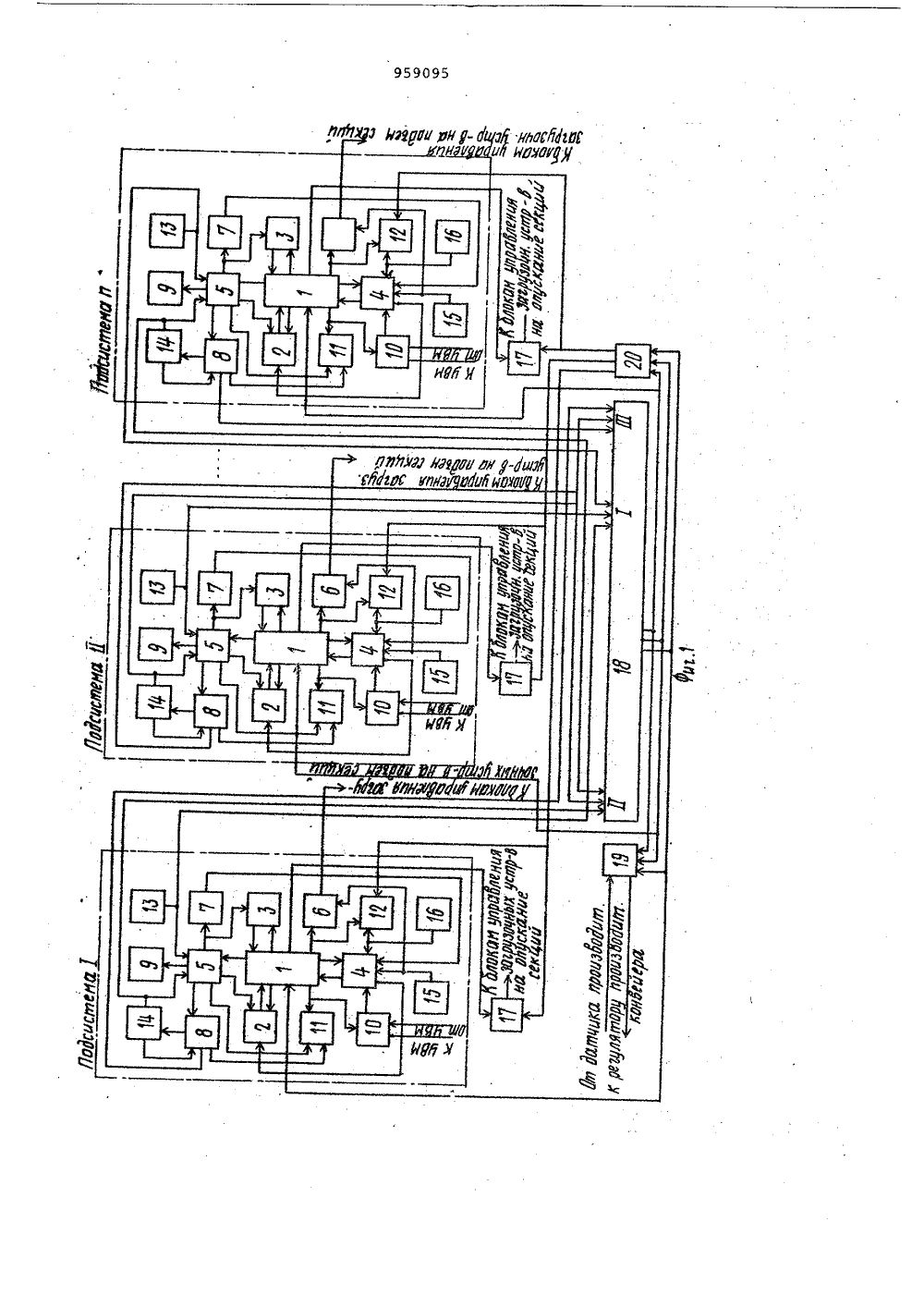
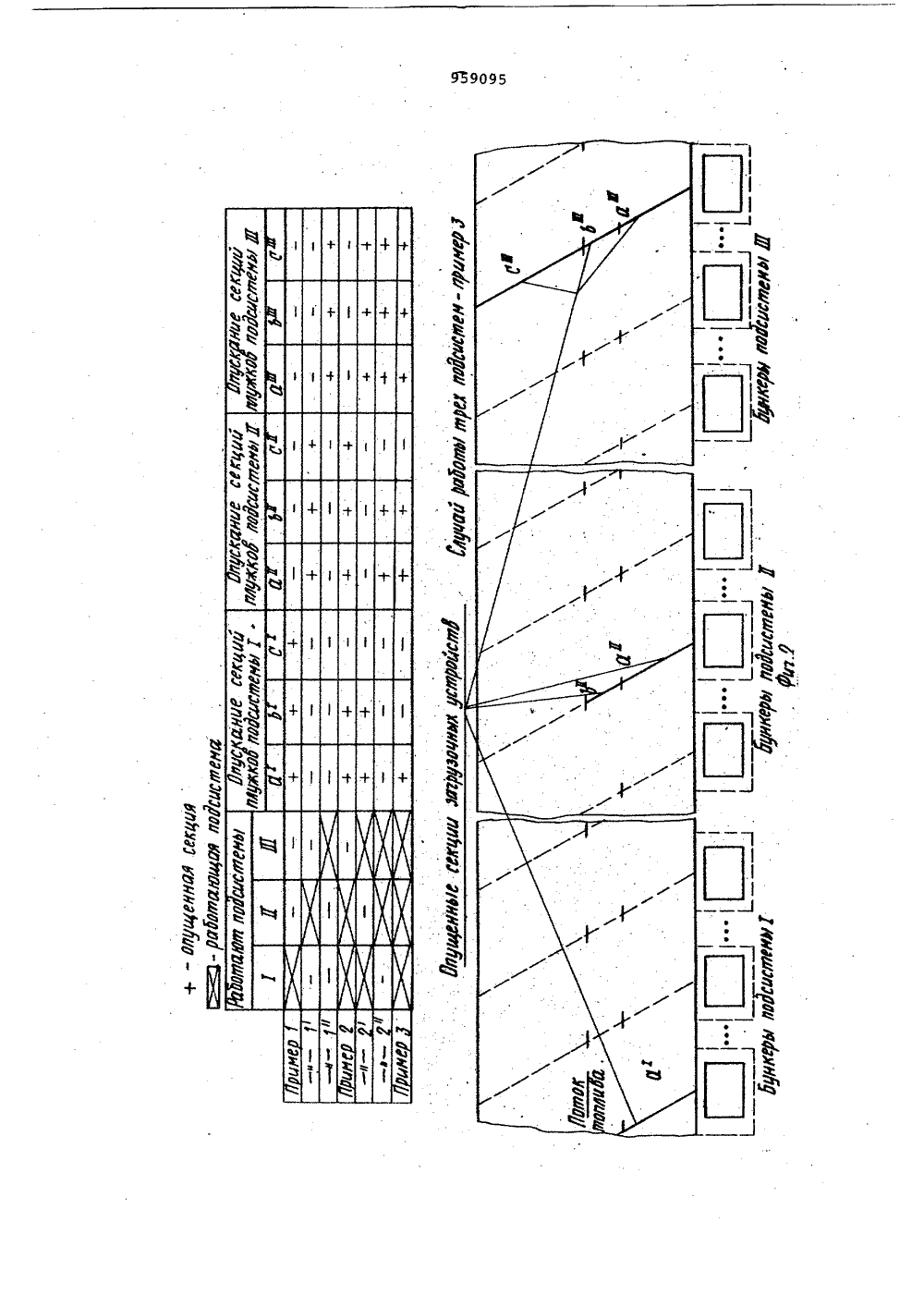
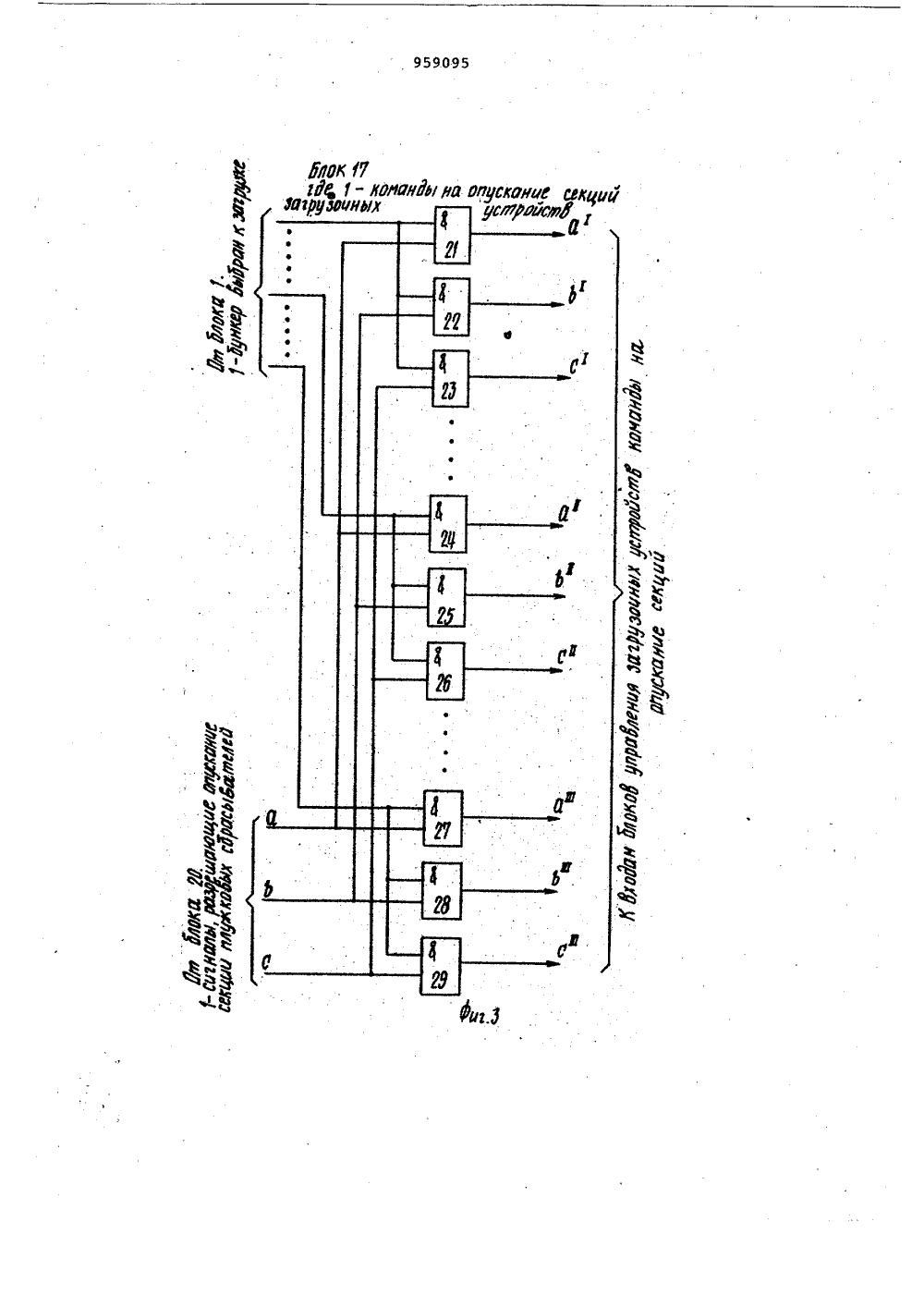
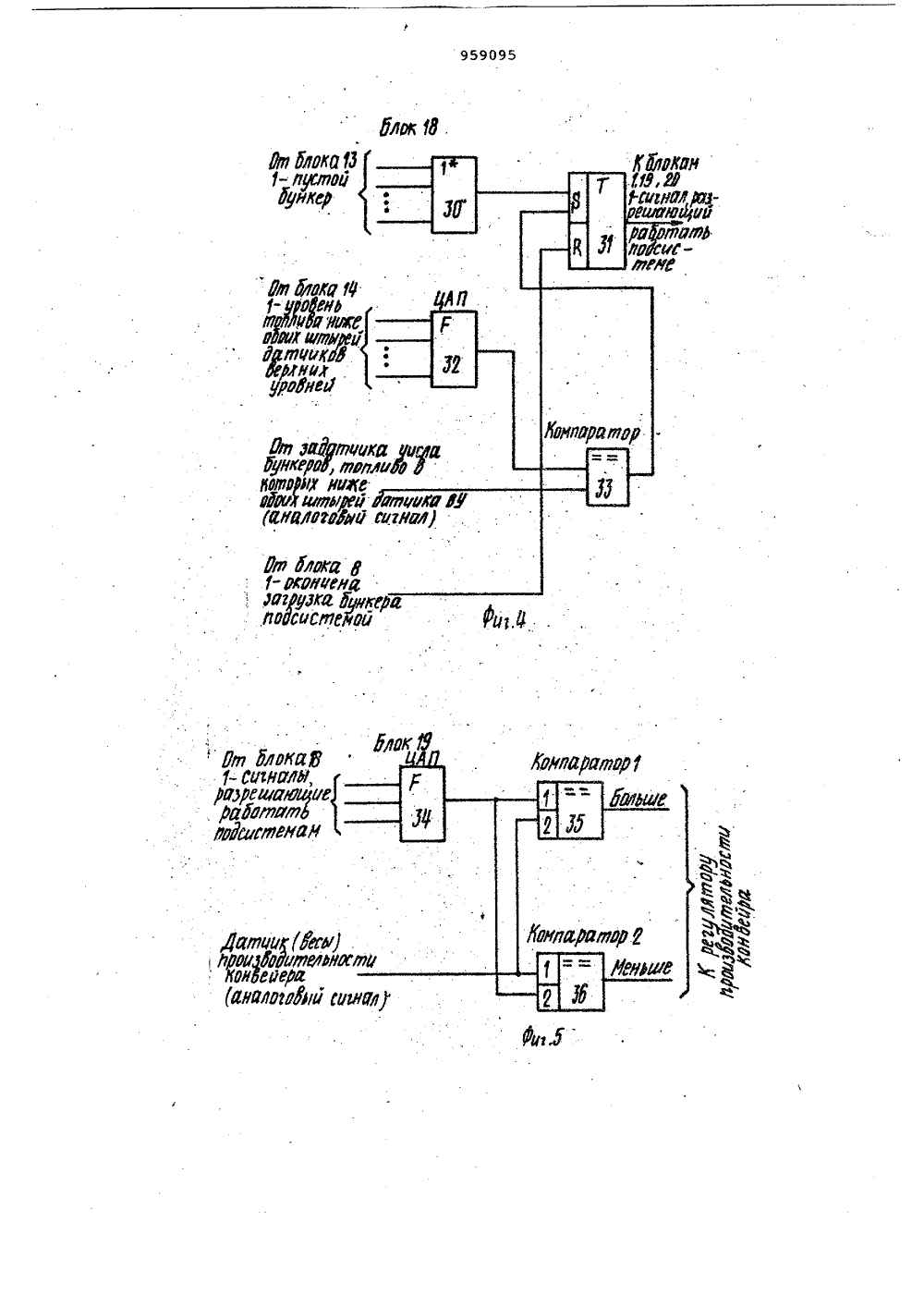
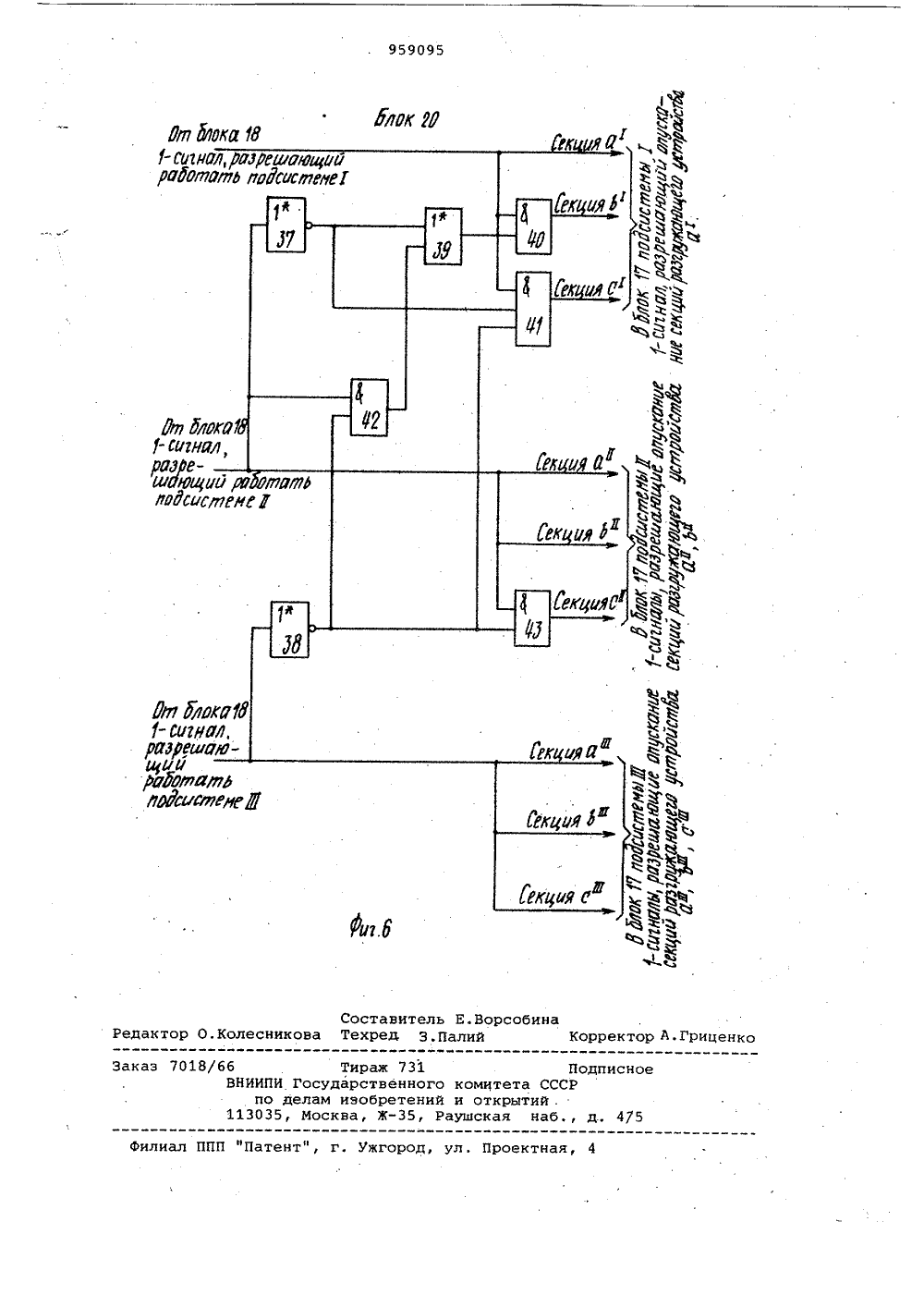
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскихСоциалистическихРеспублик пп 959095(22) Заявлено.230580 (21) 2930374/18-24 с присоединением заявки Мо С 06 Г 15/46 Государственный комитет СССР по делам изобретений и открытий,Опубликовано 1509.82, Бюллетень Мо 34 Дата опубликования описания 1509.82(72) Авторы изобрет"ния Б.А. Голицын, Л.А. Кунгурцен ление Всесоюэна Октябрьской Революци"Теплоэлектропроект" Ураль Ленин ое от и.орд 1 Заявитель оек тиснуто"-инетиз.ухд,4) СИСТЕМА МАТИЧЕСКОГО УПРАВЛЕНИЯ ЗАГРУЗКОЙ БУНКЕРОВ ется расшире"жностей системыстигается тем,еского управв введены ограости, блокок ныбора секия секциями,единены с выния загружаеретения яв льных ноз ная цель до у антомати кой бункер изводитель дсистем, бл он упранле которых с н переключля мо Целью изоб ние функциона Поставле что в систе ления эагруз ничитель про включения по ций и п блок первые входы ходами блокоИзобретение относится к автоматике и может быть использовано для одновременной загрузки одним конвейером п бункеров сырого топлива на тепловых электростанциях,По оснонному ант. сн. 9 389509 известна система автоматического управления загрузкой бункеров, которая со держит устройство блокировки поднятия однолепестковых плужковых сбрасывателей, логические блоки, устройства обработки информации и выбора бункеров для загрузки и центральную вычислительную машину 1)Недостатком этой системы является воэможность управления плужковыми сбрасывателями и выполнения поочередной загрузки только одного бункера из числа бункеров, подлежащих загрузке. мых бункеров соответствующей подсистемы, вторые входы " с соответствующими выходами блока выбора секции, а выходы - с входами блоков управления загрузочных устройств, первые входы блока включения подсистем соединены с выходами датчиков нижнего уровня, вторые входы - с выходами датчиков верхнего уровня, третьи входы - с выходами блоков определения конца цикла засыпки бункеров, а выходы - с соответствующими входами ограничителя производительности и блока выбора .секций и совходами блоков переключения загружаемых бункеров соответствующих подсистем.Предложенная система состоит из и независимых подсистем. За каждой подсистемой закреплено определенное количество бункеров. Подсистемы независимо друг от друга осуществляют выбор и загрузку закрепленных бункеров.Работают подсистемы с многосекционными загрузочными устройствами. Выполнение условия одновременной нагрузки в и бункеров с одного конвейера обеспечивается одновременностью работы подсистем, условием независимости процесса загрузки каждого из и одновременно загружаемых бункеров, авто959095 3номностью работы подсистем, использованием п секционных загрузочных устройств.На фиг. 1 приведена функциональная схема системы.Система содержит блоки 1 .переклю чения загружаемых бункеров, коммутаторы 2, блоки 3 запоминания"очередности запросов, блоки 4 времени засыпки, устройства 5 блокировки засыпки бункеров, устройства б блокировки 10поднятия загрузочных устрОйств, блоки 7 уменьшения времени засыпки, блоки 8 определения конца цикла засыпки бункеров, блоки 9 автоматического включения системы обрушения, блоки 10 15 связи с УВИ, блоки,11 контроля работы логики, блоки 12 контроля выполнения команд, датчики нижнего уровня 13, датчики верхнего уровня 14, датчики наличия топлива на ленте 15, датчики положения загрузочных устройств 16, блоки 17 управления секциями, блок 18 включения подсистем, ограничительпроизводительности 19 и блок 20 выборасекций.На фиг, 2 графически представлена технологическая схема работы аистемы с 3 подсистемами, на фиг. 3 - функци. ональная схема блока 17 управления секциями, которая состоит из элементов 21-29, реализующих функции И; на :ф .фиг. 4 - функциональная схема одного из п каналов блока 18 включения подсистем. Схема содержит элемент 30 реализующий функцию ИЛИ, 115-триггер 31, преобразователь 32 дискретных 35 сигналов от датчиков верхних уровней в пропорциональный аналоговый сигнал и элемент ЗЗ сравнения аналоговых сигналов.На фиг. 5:представлена функциональная схема ограничителя производительности 19, Схема содержит преобразователь 34 дискретных сигналов в,пропорциональный аналоговый сигнал и два элемента 35 н Зб сравнения аналоговых сигналов.На фнг б представлена функциональная схема. блока 20 выбора секцийСхема содержит элементы 37 и 38, которые реалИзуют функции НЕ, элемент 39, реализующий функцию ИЛИ и элементы 40-43;ф реализующие функции И.Система работает следующим образ о 4, Все число бункеров распределяется поровну между подсистемами.Включение подсистем в работу осуществляется блоком 18 по состояниюсигналов с датчиков верхних уровней (блоки 14) и датчиков ннжних уровней (блоки 13), Разрешение на работу дает 60 ся подсистеме при одном иэ условий: наличие хотя бы одного "пустого" бункера, либо наличие заданного числа бункеров с уровнем топлива ниже обоих штырей датчика верхнего уровня. 65 Сигналы на разрешение работы подсистем поступают в блоки 1 подсистем,а также в блоки 19 и 20.В зависимости от числа включенныхподсистем ограничитель 19 формируеткоманды на регулятор производительности для установки соответствующейпроизводительности конвейера.При работе всех и подсистем в каждый, из загружаемых бункеров ссыпаетсяЦ/и топлива, где Я - полная производительность конвейера. Приотключении каждой подсистемы производительность конвейера уменьшается на И.На фиг. 2 для примера приведенатехнодогическая схема загрузки бункеров, где система автоматическогоуправления содержит три подсистемы.На каждый бункер установлено однораэгружающее устройство, имеющеетри секции (а,в,с).Н р и м е р 1. При работе однойподсистемы из и (1) загружается одинбункер из в путем опускания трехсекций (а,в, с ) разгрузочного устройства, т.е, перекрывается полностьювся лента конвейера.П р и и е р 2. При работе двухподсистем иэ и (1 и 1) загружаетсядва бункера из в путем опусканияпяти секций (а , в и а, в 1, сф) одного раэгружающего устройства частично, а второго полностью,П р и м е р 3. Прн райоте трехподсистем иэ о (1,11 и 111) одновременно загружается три бункера иэ апутем опускания. шести секций. Лентаконвейера в данном случае перекрывается секциями а, а, вф и ао, вщ,сф. - двумя разгрузочными устройствами частично и третьим полностью.В зависимости от того, какие подсистемы включены., блок 20 выбираетдля управления каждой подсистемой определенные номера секций загрузочныхустройств, Сигналы, разрешающие работу секций, поступают в блоки 17.Блоки 17 разрешают прохождение командна опускание только тех секций загру"эочных устройств, которые выбраныблоком 20.Команды на подъем секций формируются блоками б с помощью общего длявсех секций сигнала.При окончании загрузки бункеровкакой-либо подсистемой с блока 8 этойподсистемы подается сигнал на блок18, который запрещает работу этой,подсистемы и изменяет управляющиесигналы на блоки 19 и 20.В блоках 17 (фиг. 3) на каждоезагрузочное устройство включено потри элемента 21-23, 24-2 б и т.д. (почислу секций), реализующих функции И.В случае выбора какого-либо бункера под загрузку с блока 1 поступаетсигнал "1" на первые входы соответствующих элементов И соответствующегобункера. На вторые входы элементов И с блока 20 поступают сигналы "1", т разрешающие опускание выбранных сек" цйй того же бункера.По совпадению на элементе И этих двух сигналов формируются командына опускание секций.В,блоке 18 (фиг. 4) сигналы от датчиков 13 нижнего уровня после обработки элементом 30 поступают на первыйвход триггера 31.При появлении пустого бункера наодном из входов элемента ИЛИ и соответственно на выходе появляется сигнал ф 1" По этому сигналу триггер йеребрасывается и на его выходе появляется сигнал ф 1", который разрешит работу подсистеме с пустым бункером. Сигнал "1" на выходе триггера держит" ся до поступления на 3 вход сигналас блока 8.На вход преобразователя дискретных сигналов (ЦАП) 32 поступает информация с датчиков верхнего уровня 14. Преобразователь выдает на вход элемента сравнения (компаратор) 33 ана" логовый сигнал пропорционально числу бункеров, уровень топлива в которых ниже обоих штырей датчиков верхнего уровни. На второй вход элемента 33 поступает аналоговый сигнал от задатчика числа таких бункеров.Прн равенстве обоих сигналов или большем сигнале с элемента 32 элемен.том 33 формируется сигнал .ф 1", поступающий на второй 5 вход триггеракоторый его перебрасывает, и подсистеме разрешается работа. Таким образом, подсистема включается в работу прй .:появлении хотя бы одного пустого бункера или наперед заданного числа ие заполненных бункеров.В ограничителе 19 (фиг. 5).элемент34 преобразует дискретные сигналы, разрешающие работу подсистем, в пропорциональный аналоговйй сигнал,Этот сигнал поступает на первый и второй входы элементов 35 и Зб со-; ответственно. На второй и первый входы этих элементов соответственно поступает аналоговый сигнал от датчикапроизводительности подачи материала. ,Если производительность меньйе, чем требуется; то элемент 35 формируетрегулятору команду на увеличение производительности конвейера. Если производительность больше то включается в работу элемент 36 и формируетсигнал на уменьшение производительностиВ блоке 20 (фиг. 6) элементы, реа-,лизующие функции И, ИЛИ, НЕ, определяют выбор числа секций управляемых 10 каждой подсистемой в соответствии стехнологической схемой работы, приведенной;.на фиг. 2.Использование изобретения для загрузки бункеров тепловой злектростан ции повышает оперативность загрузкии надежность работы котлоагрегатов.Формула изобретения20Система автоматическогоуправления загрузкой бункеров по авт.св, У 389509, о т л и ч а ю щ а я с я тем, что, с целью расширения функцио" нальных возможностей системы, в нее введены ограничитель производительности, блок включения подсистем, блок выбора секций и и блоков управления секциями, первые входы которых соединены с выходами блоков переключения загружаемых бункеров соответствующей подсистемы, вторые входы - с соответствующими выходами блока выбора секций, а выходы - с входами блоков управления загрузочных устройств, первые входы блока включения подсистем соединены с выходами датчиков нижнего уровня, вторые входы - с выходами датчиков верхнего уровня, третьи входы - с выходами блоков оп ределения конца цикла засыпки бункеров, а выходы - с соответствующими входами ограничителя производительности и блока выбора секций и со входами блоков переключения загружаемых 45 бункеров соответствующих подсистем.Источники информации,принятые во внимание при экспертизе1 Авторское свидетельство СССРЯ 9 389509, кл; 6 Об Г 15/46 (прото-,.тип).
СмотретьЗаявка
2930374, 23.05.1980
УРАЛЬСКОЕ ОТДЕЛЕНИЕ ВСЕСОЮЗНОГО ГОСУДАРСТВЕННОГО ОРДЕНА ЛЕНИНА И ОРДЕНА ОКТЯБРЬСКОЙ РЕВОЛЮЦИИ ПРОЕКТНОГО ИНСТИТУТА "ТЕПЛОЭЛЕКТРОПРОЕКТ"
ГОЛИЦЫН БОРИС АНДРЕЕВИЧ, КУНГУРЦЕВ ЛЕОНИД АЛЕКСАНДРОВИЧ, ПРАСОВ ЕФИМ МИЛИЯНОВИЧ, СОФРОНОВ АЛЕКСЕЙ ИВАНОВИЧ
МПК / Метки
МПК: G05B 15/02
Опубликовано: 15.09.1982
Код ссылки
<a href="https://patents.su/8-959095-sistema-avtomaticheskogo-upravleniya-zagruzkojj-bunkerov.html" target="_blank" rel="follow" title="База патентов СССР">Система автоматического управления загрузкой бункеров</a>
Преобразователь сигнала датчика углового перемещения в сигнал колебания угловойскорости

Номер патента: 423044
Опубликовано: 05.04.1974
Автор: Китра
МПК: G01P 3/52
Метки: датчика, колебания, перемещения, сигнал, сигнала, углового, угловойскорости
...генератор пилообразного напряжения 4 с синхронизирующим звеном 5. Преобразователь рразом.Датчик углового перемещения 6 при вращении измеряемого ооьекта выдаст пилооб разное напряжение, частота которого пропорциональна частоте вра 1 ценпя ва; а, а мгновенные значения амплитуды пропорциональны величине поворота вала. При неравномерности вращения вала сигнал датчика 6 (в О пределах одного оборота вала) возрастаетнепрямолинейно. Генератор пилообразного напряжения 4, вьшолнснньш на основе блокинг-генератора или мультивибрагора, генерирует пилообразное напряжение, частота которого синхронпзируется сигналом датчика 6 через синхронизпрующее звено 5, которое выполнено в виде дифференцирую 1 цен цепочки, дающей кратковременные импульсы,...
Устройство для преобразования сигнала датчика магнитной восприил1чивости

Номер патента: 327431
Опубликовано: 01.01.1972
Авторы: Институт, Молчанов, Нехорошков, Ордена, Пономарев
МПК: G01V 3/18
Метки: восприил1чивости, датчика, магнитной, преобразования, сигнала
...или какой-либо иной конструкции.Устройство действует следующим образом.Когда датчик находится в немагнитной сре де, его индуктивное,и активное сопротивлениясоответственно равны индуктивному и активному сопротивлениям коипенсационного элемента. Отфильтрованное от четных гармоник напряжение основной частоты подводится к 15 клеммам 5, б. Так как, благодаря идентичносги обеих плеч, нагрузка по переменному таку во ьсе полупериеды одинакова, то четные гармоники, которые компенсируются и в точках 5, б, отсутспвуют. Если датчик попадает в маг нигную среду, его индукгианое сопротивлениеувеличяваегся, а у компенсационного элемента остается,прежним. Следовательно, в одном из полупериодов ток в цепи больше, чем во втором, т. е. в точках 5 и б...
Формирователь сигнала датчика частоты вращения

Номер патента: 1327282
Опубликовано: 30.07.1987
МПК: G11B 15/46, H03K 5/153
Метки: вращения, датчика, сигнала, формирователь, частоты
...шиной 3,а выходом Аормирователя являются вы.ходы КБ-триггера 4,Формирователь работает следующимобразом.Сигнал с датчика частоты вращения(не показан) через усилитель или непосредственно поступает на сигнальную шину 3 (Лиг,2 диаграмма 10), навремя превышения которым уровня верхнего порога на выходе элемента 1 шормируется отрицательный импульс (Фиг,2" диаграмма 11). Аналогичный импульсформируется на выходе элемента 2 вовремя превышения по абсолютной величине нижнего порога (Лиг,2 диаграмма 12), Пороговый элемент 8 переключается при пересечении входным сигналом нулевого уровня (йиг,2 диаграмма13). Отрицательный перегад напряже 27282 2ния с порогового элемента 1 переключает триггер 7 по входу Б, а по входу К триггер 7 управляется...
Преобразователь сигнала датчика в управляющий сигнал
Номер патента: 372442
Опубликовано: 01.01.1973
Авторы: Вител, Литвин, Маликов, Самойленко, Смирнов
МПК: G01D 5/12
Метки: датчика, сигнал, сигнала, управляющий
...диод и резистор нагрузки.Предложенное устройство отличается тем, что в нем коллектор транзистора подключен к точке соединения датчика и диода, а к базе и эмиттеру подключен дополнительный источник питания, соединенный параллельно и в противофазе с основным источником питания,Это позволило увеличить крути рзования.На чертеже приведена функциональнама устройства,Оно содержит основной источник питатранзистор 2, дополнительный источитания 3, датчик 4, диод 5 и нагрузочныистор б,При отрицательной полярности дотельного источника питания т, образовнапример, генератором напряжения сдовательно включенным резистором,эмиттерный переход транзистора 2 зап ральныи Ордена Трудовогоельский институт комплекснойации Ток положительной полярности...
Устройство для определения фазы двоичного псевдошумового сигнала с последовательным выбором оценок

Номер патента: 468187
Опубликовано: 25.04.1975
Авторы: Баранников, Наумов
МПК: G01R 25/00
Метки: выбором, двоичного, оценок, последовательным, псевдошумового, сигнала, фазы
...смесьпоступает на вход двухпорогового решающего элемента 2. Если амплитуда профильтрованного сигнала на входе решающего элемента 2 превышает верхний (положительный)порог + О, то на выходе решающегоэлемента 2 положительный потенциал, соответствующий единичному элементу последовательности + А, Если превышается (по модулю) нижний (отрицательный)порог срабатывания - (3, то на выходе решающегоэлемента потенциал - А, Если напряжениес выхода фильтра ые превышает ни один изпорогов, то потенциал выхода решающегоэлемента равен нулю.Выходной потенциал элемента 2 управляет работой блока формирования оценок та.30ким образом, что в моменты прихода навторой вход блока 3 формирования оценокимпульса тактовой частоты от генератора 4тактовой частоты, на...
Предыдущий патент: Устройство для определения амплитудных характеристик случайных процессов
Следующий патент: Устройство для контроля параметров логических блоков
Случайный патент: Кассета гранильно-шлифовального станка