Дифференциальная система идентификации
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
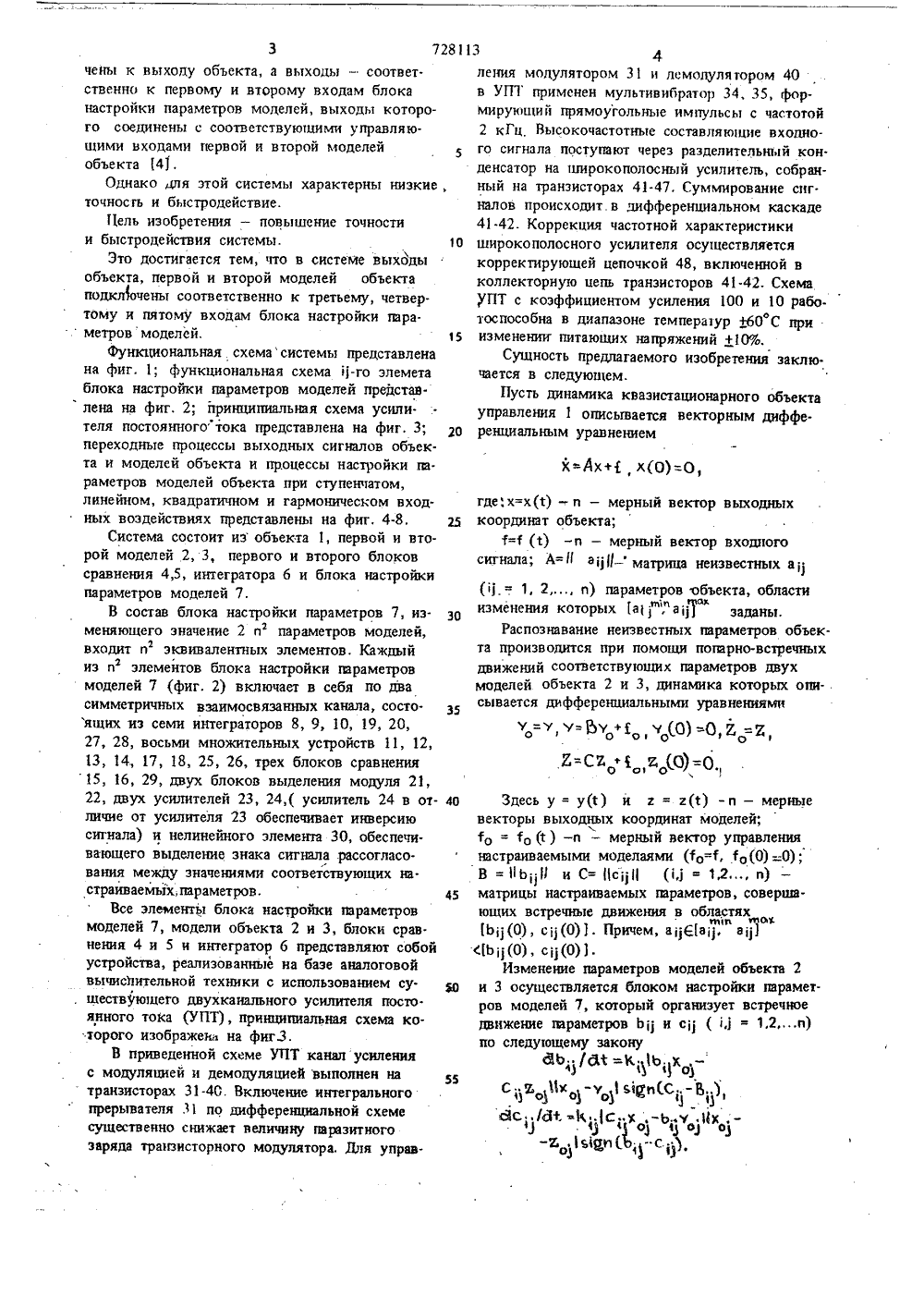
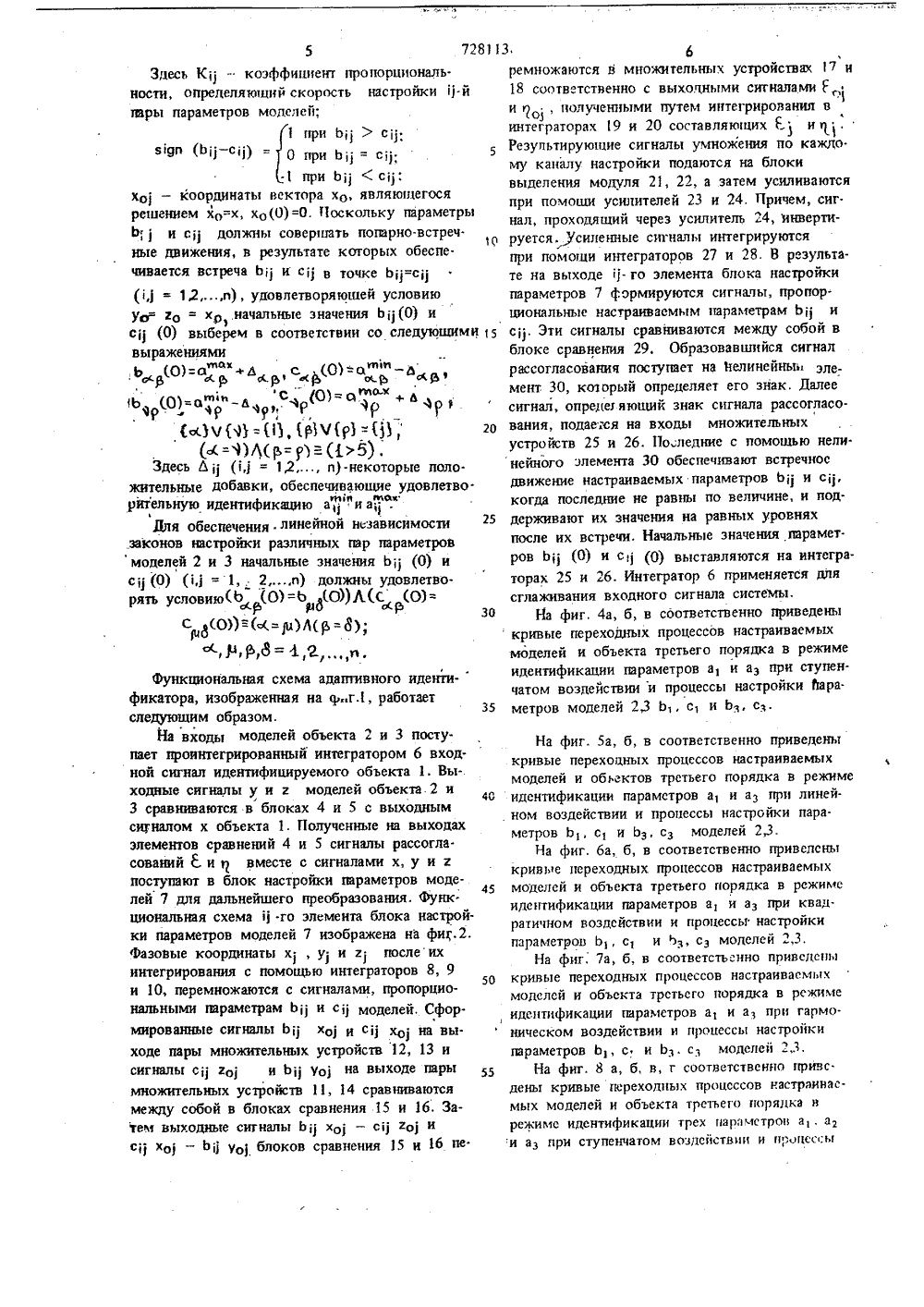
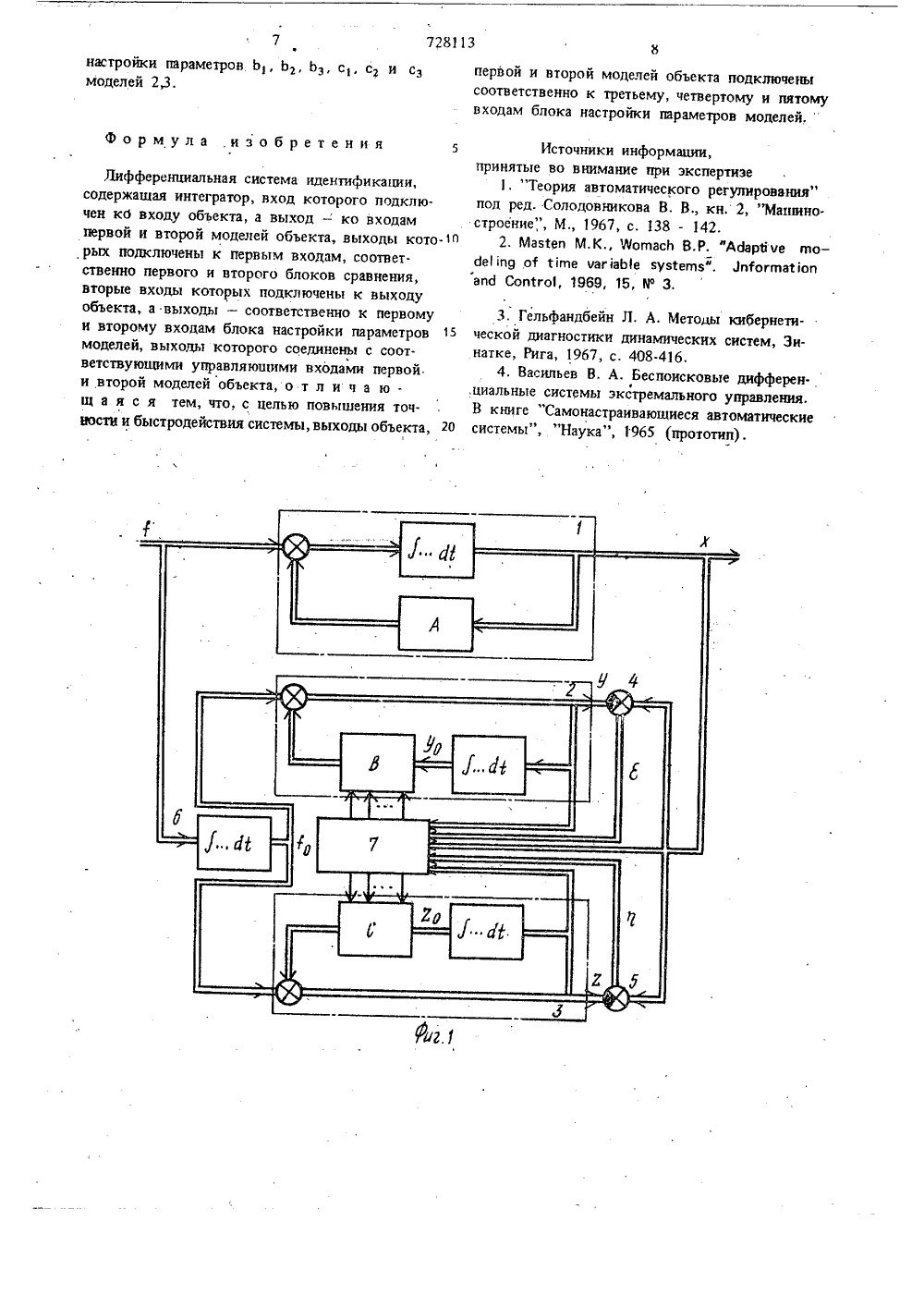
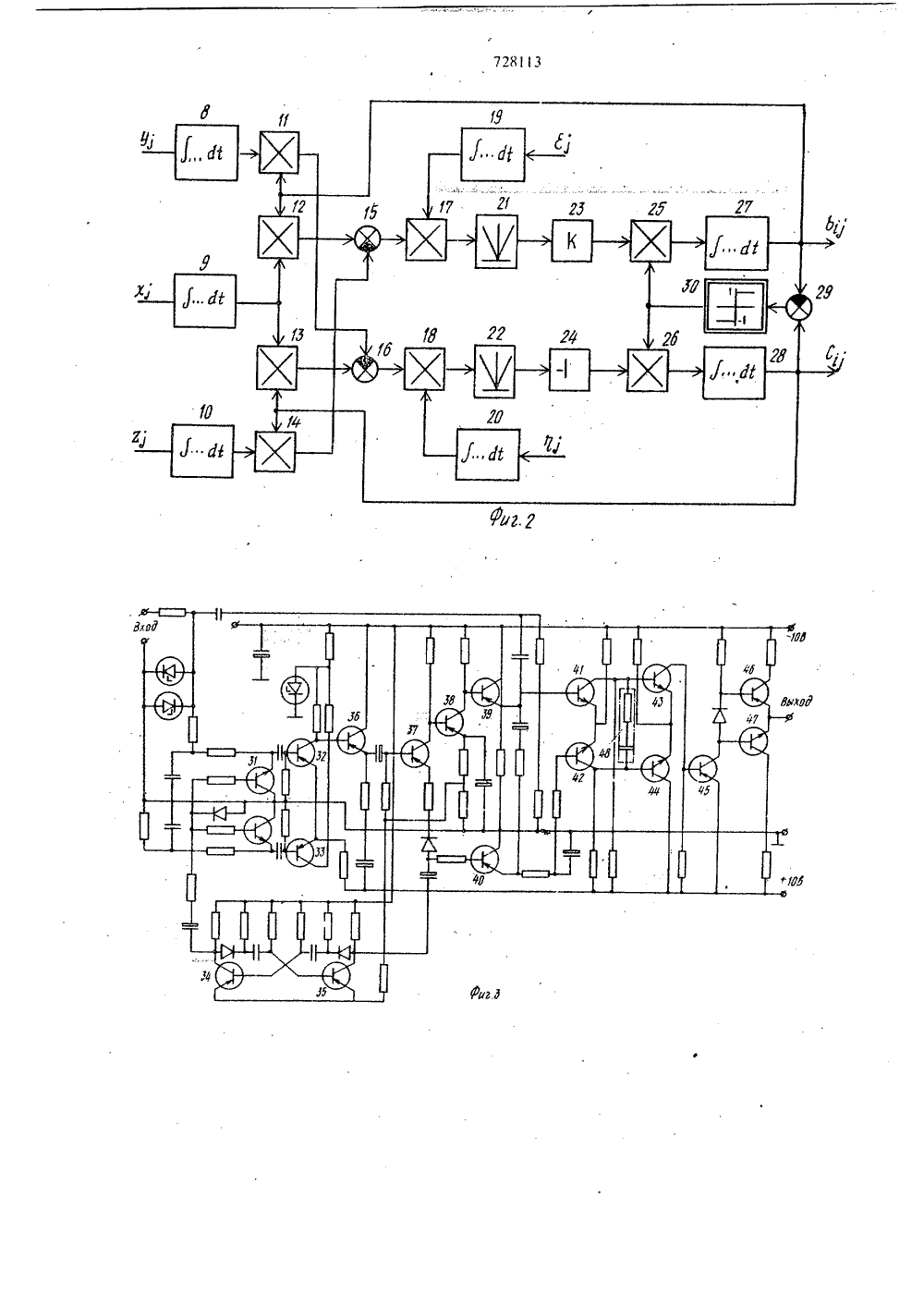
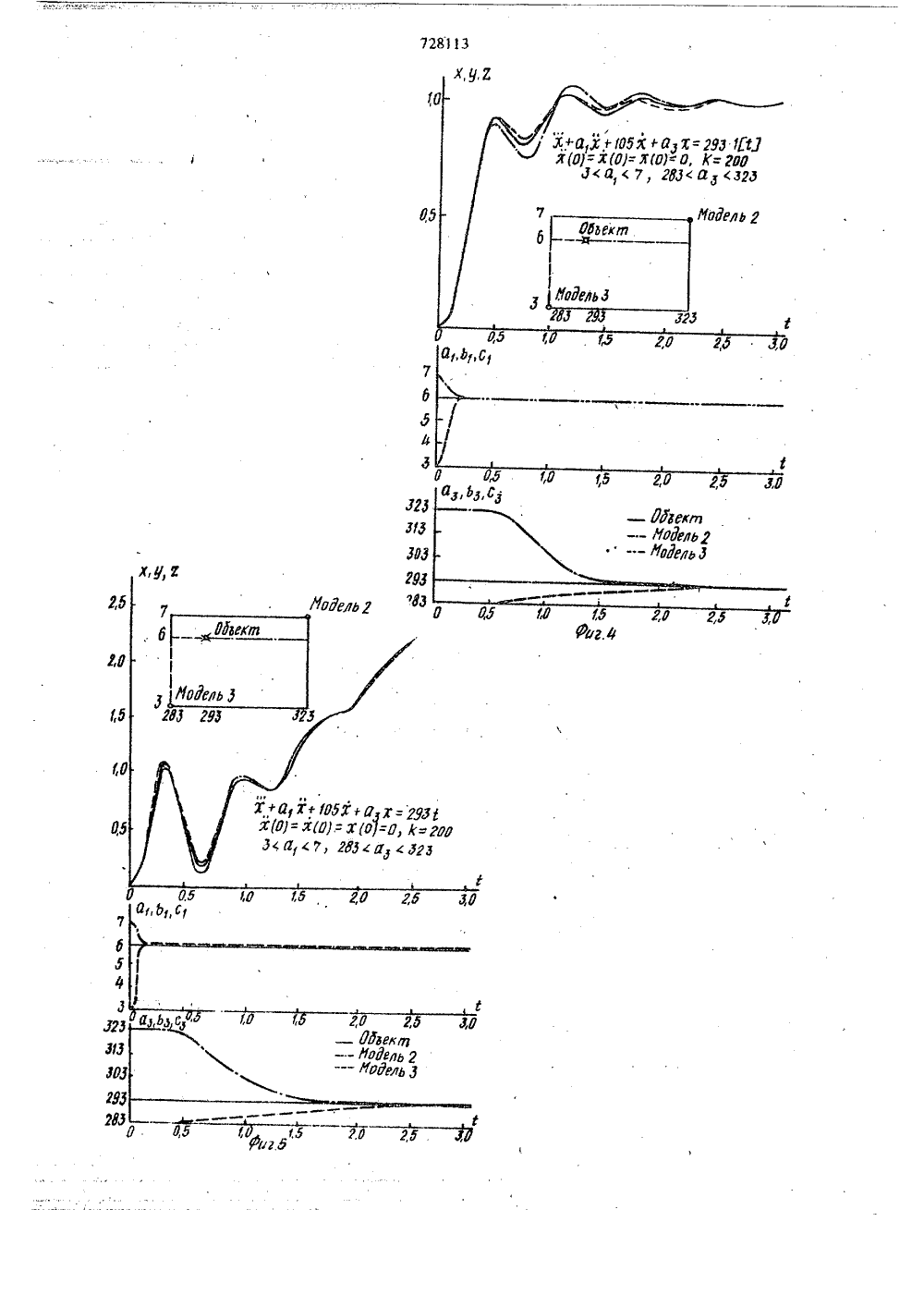
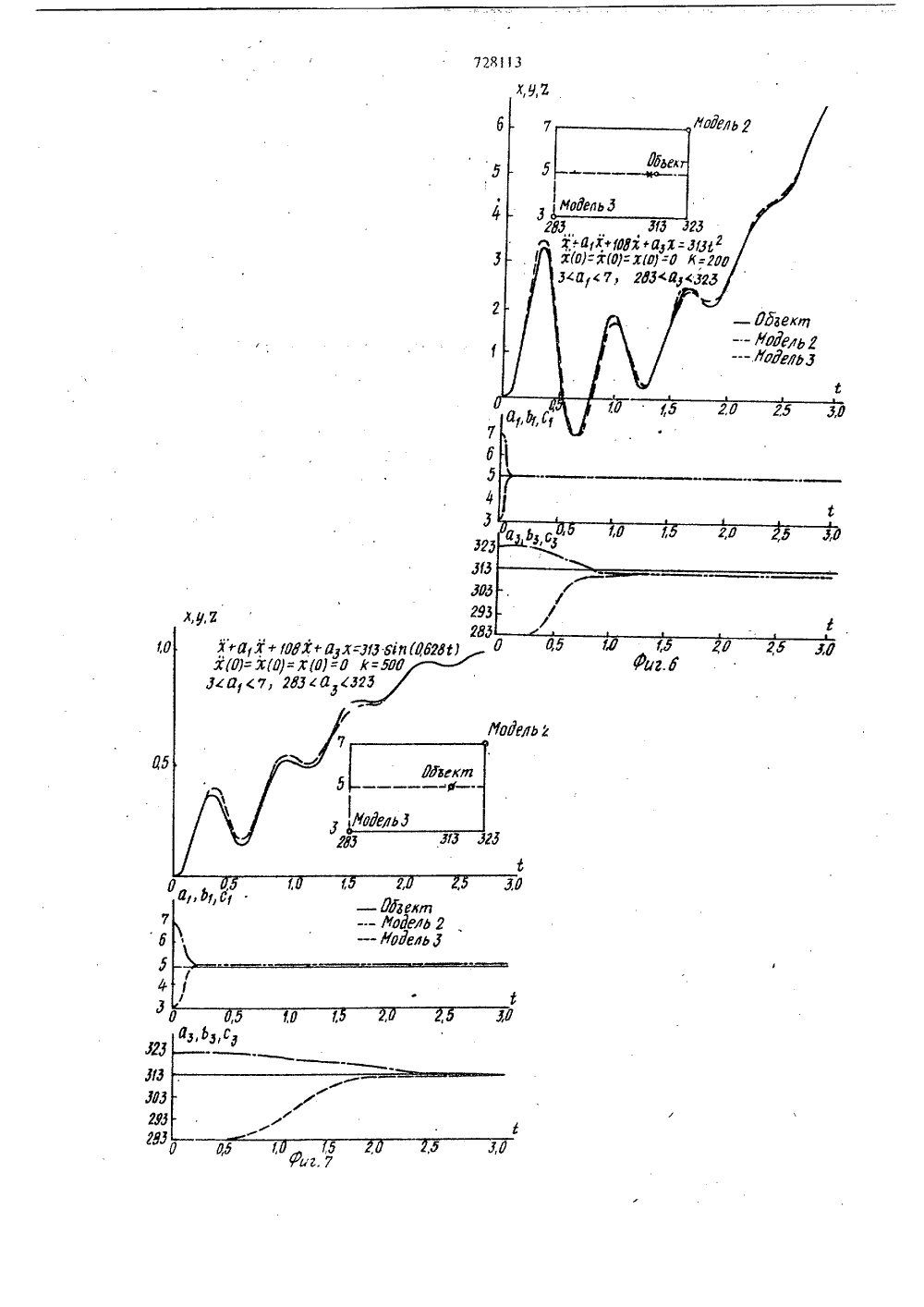
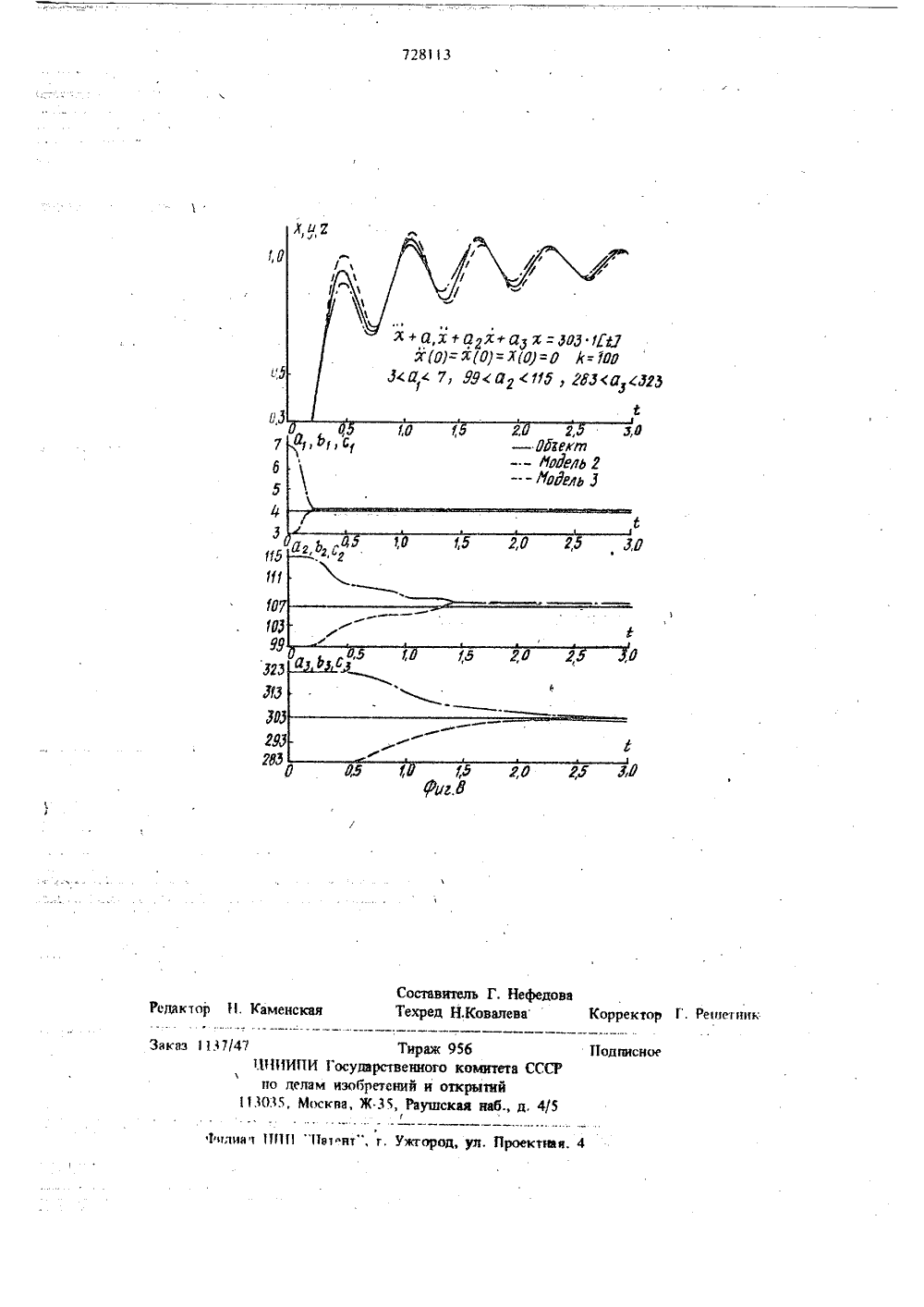
(28) Приоритет ио делам изобретений и открытий(72) Авторы изобретения Днепропетровский ордена Трудового Красного ЗнамениГосударственный университет имени 300.летия ВоссоединенияУкраины с Россией(54) ДИФФЕРЕНЦИАЛЬНАЯ СИСТЕМА ИДЕБЧ ИФИКАЦИИ Изобретение относится к области дифференциальных систем экстремального управления, Оно может найти применение при идентифика. ции линейных объектов, передаточные функции которых не имеют нулей, и коэффициенты уравнения которых приблизительно на порядок отличаются друг от друга, при условии, что априори заданы порядок структуры индентифицируемого объекта, верхняя и нижняя границы допустимых значений коэффициентов его уравнения и выполнены условия асимптотической сходимости процесса поиска параметров мо. делей.Известны системы идентификации, содержа. шие настраиваемую модель, блок сравнения, вычислитель критерия идентификации и испол нительное устройство, которое осуществляет изменение параметров модели. В качестве кри. терия идентификации в таких системах обычно применяется некоторый функционал, в общем случае зависящий от входного сигнала, выходных сигналов модели и объекта, параметров модели и врсмсни, а модель имеет фиксированнчю структуру, которая выбирается исходя из априорных сведений об идентифицируемомобъекте 11121 и (З 1Однако в этих системах структура моделиоказывает больщое влияние на точность и скорость настройки лараметров модели. Точностьсистемы в значительной степени зависит отадекватности выбранной структуры моделиструктуре объекта, а скорость настройки параметров модели (быстродействие системы) вэначителной степени определяется взаимосвязью,существующей между ними. При неортогональных параметрах каждый параметр необходиморегулировать несколько раз, применяя итера.тивные процедуры настройки, Указанные обсто.ятельства значительно снижают то ность и быст.родействие известных систем,Наиболее близкой по технической сущностик предложенной является дифференциальнаясистема идентификации, содержащая интегратор,вход которого подключен ко входу объекта, аивыход - ко входам первой и второй моделеиобъекта, выходы которых подклн 1 чены к первымвходам соответственно первого и второго бло.ков сравнения, вторые входы которых попклю.7281 х=Ах+1 х(0)=0 чены к выходу объекта, а выходы - соответственно к первому и второму входам блоканастройки параметров моделей, выходы которого соединены с соответствуюгцими управляющими входами первой и второй моделейобъекта 41Однако для этой системы характерны низкие,точносгь и быстродействие.Цель изобретения - повышение точностии быстродействия системы. 1 ОЭто достигается тем, что в системе выходыобъекта, первой и второй моделей объектаподкл 1 очены соответственно к третьему, четвертому и пятому входам блока настройки пара метров моделей. 15Функциональная схемасистемы представленана фиг. 1; функциональная схема ц-го элеметаблока настройки параметров моделей представ.лена на фиг. 2; принципиальная схема усили.теля постоянного тока представлена на фиг, 3;переходные процессы выходных сигналов объекта и моделей объекта и процессы настройки па.раметров моделей объекта при ступенчатом,линейном, квадратичном и гармоническом входных воздействиях представлены на фиг, 4.8, 25Система состоит иэ объекта 1, первой и второй моделей 2, 3, первого и второго блоковсравнения 4,5, интегратора 6 и блока настройкипараметров моделей 7,В состав блока настройки параметров 7, изменяющего значение 2 и параметров моделей,входит и эквивалентных элементов. Каждыйиз и элементов блока настройки параметровмоделей 7 (фиг. 2) включает в себя по двасимметричных взаимосвязанных канала, состоящих из семи интеграторов 8, 9, 10, 19, 20,27, 28, восьми множительных устройств 11, 12,13, 14, 17, 18, 25, 26, трех блоков сравнения15, 16, 29, двух блоков выделения модуля 21,22, двух усилителей 23, 24,( усилитель 24 в отличие от усилителя 23 обеспечивает инверсиюсигнала) и нелинейного элемента 30, обеспечивающего выделение знака ситнала рассогласования между значениями соответствующих настраиваемых, параметров,45Все элементы блока настройки параметровмоделей 7, модели объекта 2 и 3, блоки срав.пения 4 и 5 и интегратор 6 представляют собойустройства, реализованные на базе аналоговойвычислительной техники с использованием су. шествующего двухканального усилителя посто.янного тока (УПТ), принципиальная схема которого изображена на фигЗ.В приведенной схеме УПТ канал усиленияс модуляцией и демодуляцией выполнен натранзисторах 31-40. Включение интегральногопрерывателя 31 по дифференциальной схемесущественно снижает величину паразитногозаряда транзисторного модулятора. Для управ 13 4ления модулятором 31 и демодулятором 40 в УПТ применен мультивибратор 34, 35, формирующий прямоугольные импульсы с частотой 2 кГц Высокочастотные составляющие вхопного сигнала поступают через разделительный конденсатор на широкополосный усилитель, собранный на транзисторах 41-47. Суммирование сигналов происходит.в дифференциальном каскаде 41.42. Коррекция частотной характеристики широкополосного усилителя осуществляется корректирующей цепочкой 48, включенной в коллекторную цепь транзисторов 41-42. Схема УПТ с коэффициентом усиления 100 и 10 работоспособна в диапазоне темпераур +60 С при измененвг питающих напряжений +10%.Сущность предлагаемого изобретения заклю.чается в следующем.Пусть динамика кваэистационарного объектауправления 1 описывается векторным дифференциальным уравнением где, х=х(т) - и - мерный вектор выходных координат объекта;1=1 (т) -и - мерный вектор входного сигнала; А=П ацИ -матрица неизвестных ац (. = 1, 2 и) параметров объекта, области изменения которых а 11," а Д заданы.Распознавание неизвестных параметров объекта производится при помощи попарно-встречных движений соответствующих параметров двух моделей объекта 2 и 3, динамика которых опи. сывается дифференциальными уравнениямич =,ч=Ьч+,г (О) =0,Е=СЕ ф,Е (О)=0. Здесь у = у(т) и г = х(т) -и - мерны.е векторы выходных координат моделей;1 о = 1 о (т) - и - мерный вектор управления настраиваемыми моделаями (1 о=1, Фо(0) =-0);В: НЬ;р и С= И (Ч = 12, и) - матрицы настраиваемых параметров, соверщающих встречные движения в областяхиО Ь 1(0), с;1(О) , Причем, а;1(-а;1, а;1Ь(О), п(0)3.Изменение параметров моделей объекта 2 и 3 осуществляется блоком настройки параметров моделей 7, который организует встречное движение параметров Ь и сп ( ,1 = 1,2,и) по следующему законуЬ.(а =К,Ь,1 х. -Ч = Ъ 1 одс, .Ьих.З-у Ъьа.(С,-Ь,.)о о о 1 3 фВс" АР К .с-х .-Ь., Их,- 1). 4 1 о 41 о 1 ог7 728113настройки параметров Ь, Ьт, Ьз, с ст и сзмоделей 2,3,первой и второй моделей объекта подключенысоответственно к третьему, четвертому и пятомувходам блока настройки параметров моделей.Формула .изобретения Лифференциальная система идентификации, содержащая интегратор, вход которого подключен ко входу объекта, а выход - ко входам первой и второй моделей объекта, выходы котоп рых подключены к первым входам, соответственно первого и второго блоков сравнения, вторые входы которых подключены к выходу объекта, а выходы - соответственно к первому и второму входам блока настройки параметров 15 моделей, выходы которого соединены с соответствующими управляющими входами первой. и второй моделей объекта, о т л и ч а ющ а я с я тем, что,. с целью повышения точности и быстродействия системы, выходы объекта, 20 Источники информации,принятые во внимание при экспертизе1, "Теория автоматического регулирования"под ред. Солодовникова В. В кн. 2, "Машиностроение" М., 1967, с. 138 - 142,2. Маатеп М.К., ЗотасЬ В,Р. "Ас 1 арвче гпо -де 11 пц о 1 т 1 гпе чаг 1 аЫе ауатепза"1 п 1 огаат 1 опапд Соптго, 1969, 15, Мф 3,3. Гельфандбейн Л. А, Методы кибернетической диагностики динамических систем, Зинатке, Рига, 1967, с. 408.416,4. Васильев В, А. Беспоисковые дифферен.Ф. Рещетннк Т. Каменская Техре т яз 1137/ Тираж 956И Государственного комитм изобретений и открытиаква, Ж 35, Раутдскм наб., д. 4/ к ЧТТИИП по дел ТТ 3035, М 1 и,тиач ТТПП
СмотретьЗаявка
1921485, 25.05.1973
ДНЕПРОПЕТРОВСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИМ. 300-ЛЕТИЯ ВОССОЕДИНЕНИЯ УКРАИНЫ С РОССИЕЙ
ИВАХНЕНКО МАКСИМ МАКСИМОВИЧ, КОРСУН ВАЛЕРИЙ ИВАНОВИЧ, ИВАНОВ ЛЕОНТИЙ ФЕДОРОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: дифференциальная, идентификации
Опубликовано: 15.04.1980
Код ссылки
<a href="https://patents.su/8-728113-differencialnaya-sistema-identifikacii.html" target="_blank" rel="follow" title="База патентов СССР">Дифференциальная система идентификации</a>
Устройство для идентификации линейного объекта

Номер патента: 1374184
Опубликовано: 15.02.1988
МПК: G05B 23/02
Метки: идентификации, линейного, объекта
...первый вход второго сумматора 6, на второй вход которого с выхода второго блока 18 переключателей поступает выходной сигнал объекта 1 идентификации Т С выхода второго сумматора 6 поступает сигнал гдеК=4.Последовательно соединенные первый блок 9 квадраторов, на входы которого поступает вектор входных сигналов Х 4, и третий сумматор 1 О реализуют определение квадрата евклидовой нормы указанного вектора входных сигналов. где К 4.Сигнал 11 Х 1 поступает на второйвход первого делителя 7, на первыйвход которого поступает сигнал Ь ,определенный согласно выражению (31 .На выходе первого делителя 7появляется сигнал величины приращения где К=4.Сигнал Х , поступая на входы цепочки последовательно соединенных второго блока 22 квадраторов и шестого...
Устройство для контроля параметров технологического процесса

Номер патента: 736145
Опубликовано: 25.05.1980
Авторы: Варганов, Вексер, Зарецкий, Моисеев, Потанин
МПК: G07C 3/00
Метки: параметров, процесса, технологического
...ндицирусмяя инфОрмация хранится Впамяти индикаторов ло следуюп 1 его,:Омента Пуск, 5 локи - 1 и Я Об-,1 аботки сигналов Образуют линейный узел,в котором происходит декодированОсчитанных сигналов, ременная пс"хп 4 -вольная развертка и Г.=-револ симголовв телеграфный код МТК,.элок 11 задания режима работы Обеспечивает автономную работу уст.:Ойстсаи работу устройств с вычислительноймашиной 13, при этом возможен периодический или разовый опрос датчиковсигналов. При включении устройства синхронизатор 10 начинает вырабатыватьтактовые импульсы, синхрокизирующиеработу блэков. Елок 7 формированияслужебных сигналов формирует сигналЦифра, который через блок 8 сопряжения с телетайпом поступает на телетайп 12, после чего в блоке 7...
Устройство для контроля блоков постоянной памяти

Номер патента: 886059
Опубликовано: 30.11.1981
Авторы: Бабаев, Бакакин, Ермаков, Исаев
МПК: G11C 29/00
Метки: блоков, памяти, постоянной
...сигналов, с ЗОвыходом накопители 4 и седьмым входомблока 3 управления. Выход распределителя 8 сигналов подключен ко второмувхоцу схемы 9 сравнения. Одни из входов генераторов токовых импульсов 3% группы 5 соединены со вторым выходомпервого блока 6 местного управлении,цругие входы - со вторым выхоцом формирователя 2 адресных сигналов, а выхоцыс одними из вхоцов индуктивных цатчиков 40 группы 10, другие входы которой под-ключены к выходу второго блока 11 местного управления, Первый и второй входывторого блока 11 местного управлениисоединены соответственно с третьим вы ходом формирователя 2 адресных сигналов и с восьмым выходом блока 3 управления. Выходы индуктивных датчиковгруппы 10 подключены ко входам формирователя 12...
Устройство для анализа параметров графа

Номер патента: 1437874
Опубликовано: 15.11.1988
Авторы: Додонов, Котляренко, Пелехов, Приймачук, Щетинин
МПК: G06F 15/173
Метки: анализа, графа, параметров
...этом таймер 6 выдает на свой выход номера загружаемого канала номер свободного канала, например номер 1,и, кроме того, на выходе блока 2 памяти 40 появляется число 2 (вес ветви 2). Через время Т, достаточное для чтения информации из блоков 1 и 2 памяти и выдачи номера свободного канала таймером 6, на выходе 42 блока 10 синхронизации появляется сигнал единичного уровня. При этом по адресу 2 в блок 5 памяти производится запись числа 1 (по адресу ветви 2 запоминается номер канала таймера 6 занятый ее моделированием ), по адресу 1 в блок 3 памяти производится запись числа 2 (по адресу номера канала занятого моделированием ветви запоминается ее номер), в первый канал таймера 6 загружается число 2 (вес ветви 2). Через время Т, достаточное для...
Система адаптивного управления одностадийным циклом мокрого измельчения

Номер патента: 1480878
Опубликовано: 23.05.1989
Авторы: Бабец, Тисменецкий, Трач, Хорольский, Хорошенький
МПК: B02C 25/00
Метки: адаптивного, измельчения, мокрого, одностадийным, циклом
...8. Сигнал свыхода триггера 20 поступает на уп"равляющнй вход масштабного блока 9,на выходе которого формируется величина максимального значения моду"ля производной с учетом переходаобъекта на правую ветвь экстремальной характеристики, путем умножениявеличины значения Я, при которомсработал триггер 20, на постоянныймножитель (1 + - ), где- величина порога различимости при поискемаксимума в амплитудном детекторе 8.На первом выходе таймера 21 формируется новое значение динамического коэАфициента Су, которое поступает в вычислитель 14, блок 18 памятии блок 14 сравнения. На масштабныеблоки 11 и 12 с выхода блока 18 памяти поступает старое значение оцен-ки постоянной времени запаздыванияобъекта Т(1. На блок 14 сравненияпоступает от...
Предыдущий патент: Пневматический трехпозиционный регулятор
Следующий патент: Устройство для управления системой лучевой обработки
Случайный патент: Контактный отстойник