Система программного управления двухсуппортным токарным станком
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 484938
Автор: Кошкин
Текст
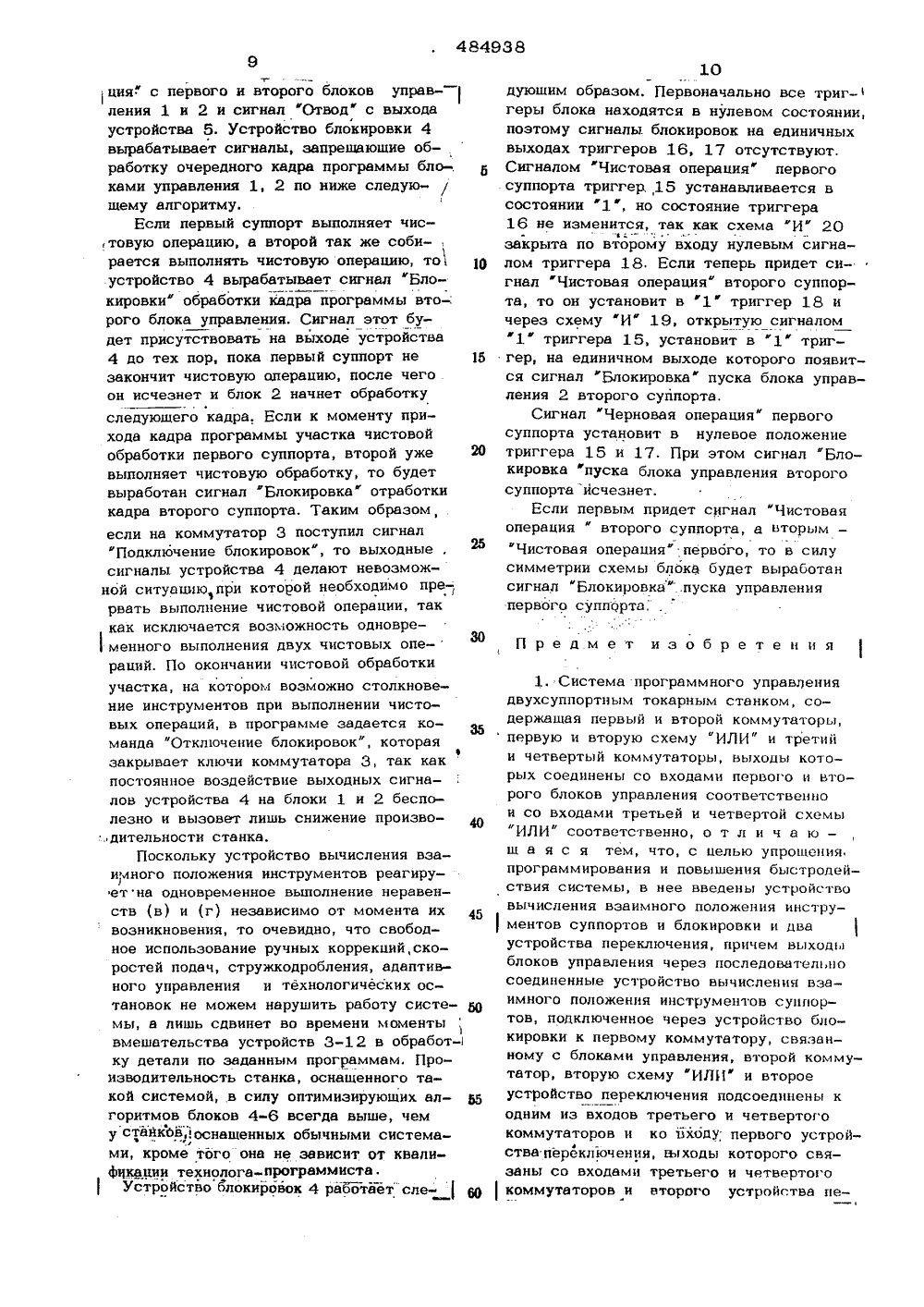
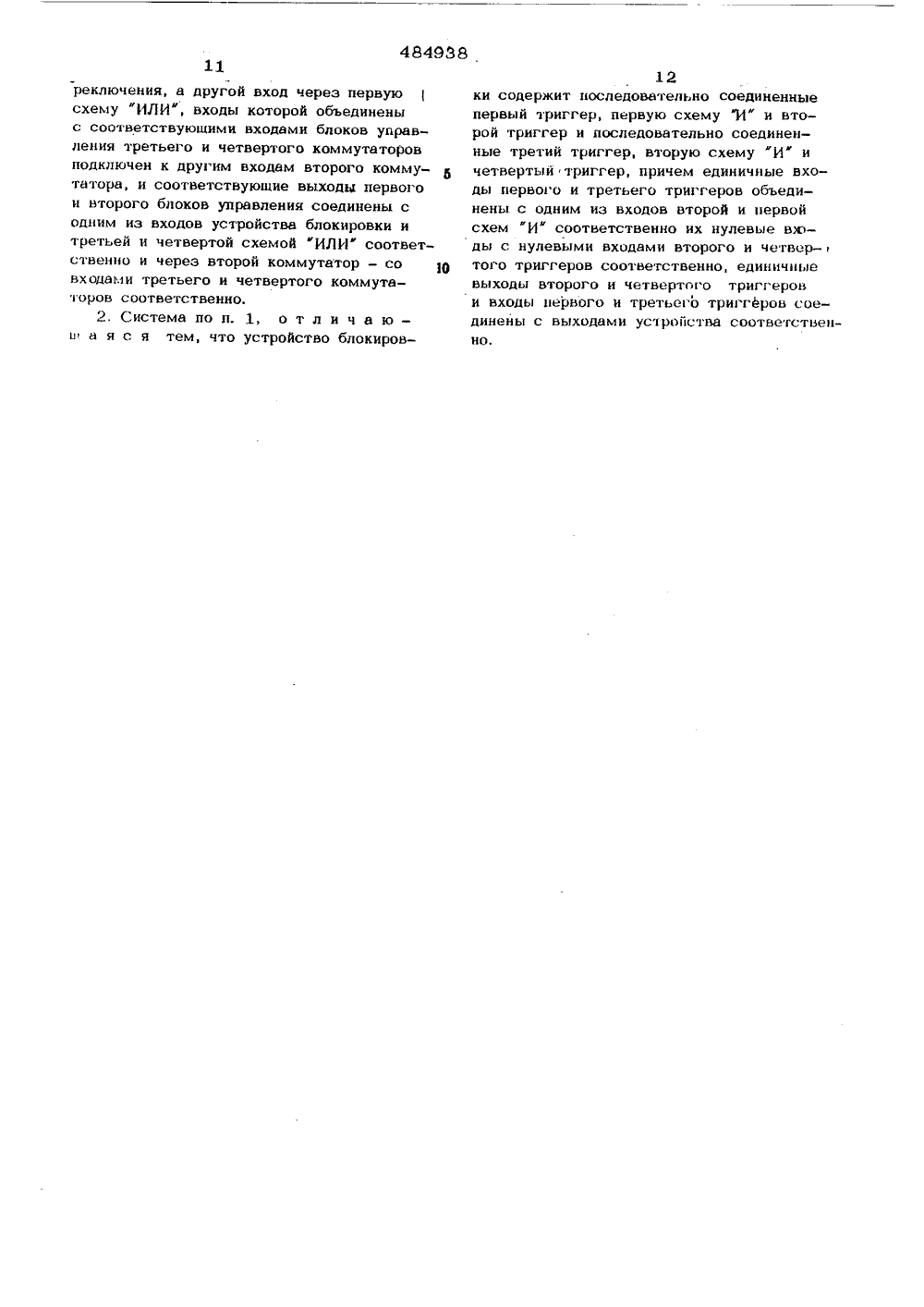
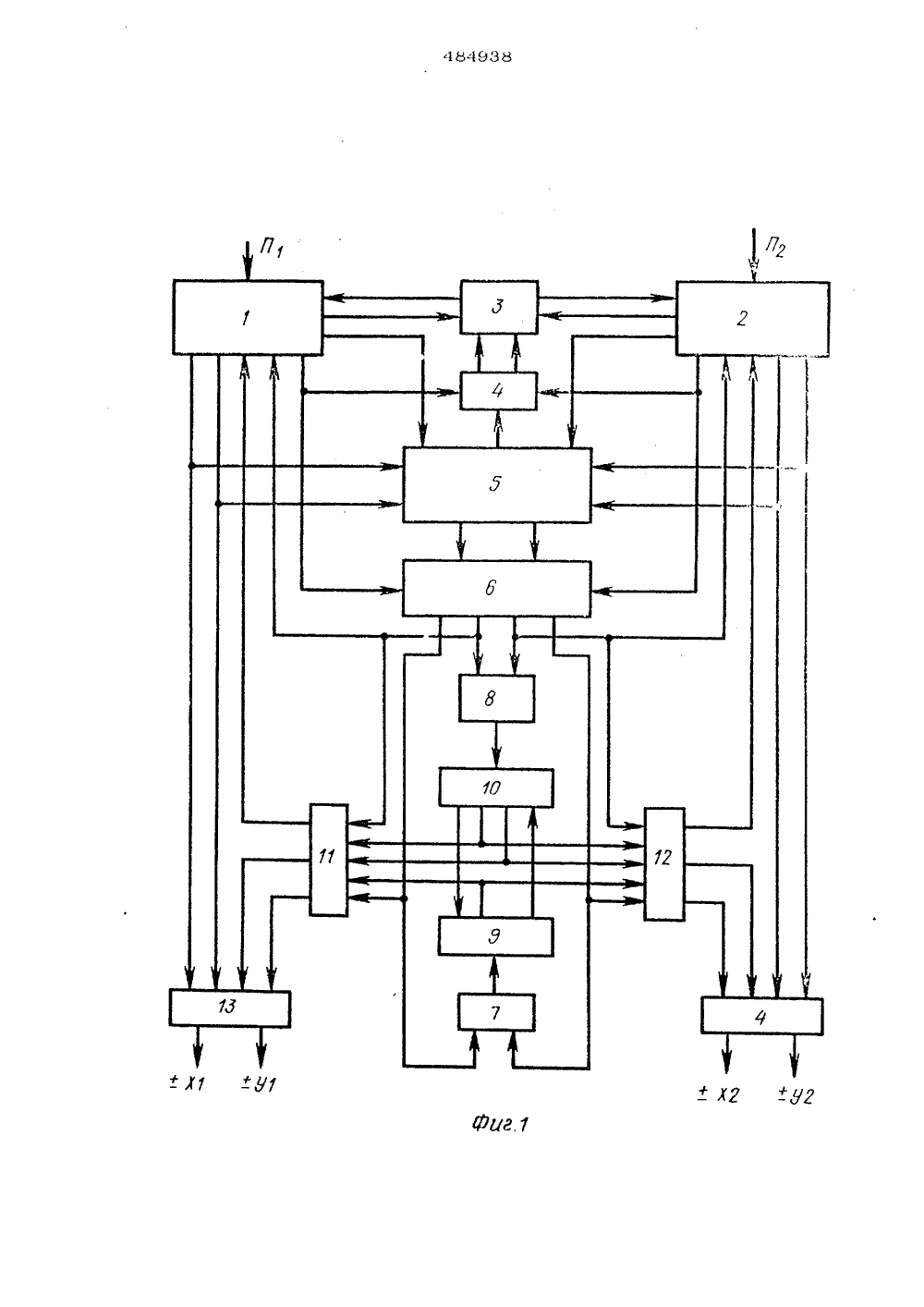
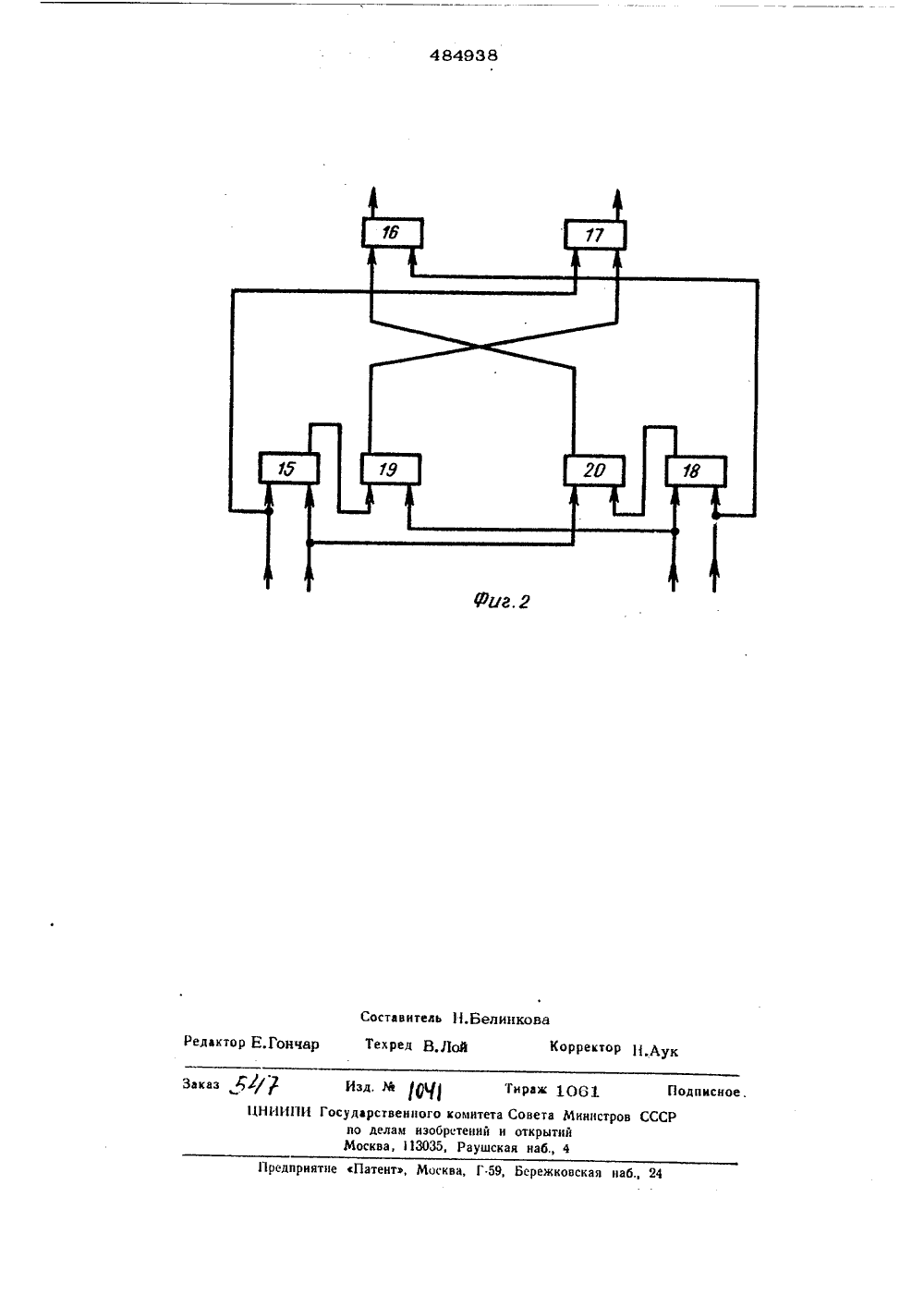
ОП ИСАНИЕ ИЗОБРЕТЕН ИЯ Союз СоветскихСоциалистическихРеспублик0 О /18 судерстееиныи комитетавета Министров СССРпо делам иэабретенийи открытийБюллетень та опубликования описания 06.01 шкин 72) Автор изобретени 1) Заявите 4) СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ ДВУХСУППОРТНЫМ ТОКАРНЫМ СТАНКОМ 2 ия запас сечениинижвет бь т е нрогра действия нвко э сложность пр При соств учитывать взвмные перемешения суппо в,ени чтобымомен и з ому с бловтор, втоойство пев м,ми о ектор жест польз бонх су ий; что кие огр е ус к од о кол ним из вхомутвторов перекл 1 очес входами о оввния кодроб ия внь струж 1 ния и указа 1 соглвов тре вто лут ехно очения, пру ой1 Н, входы ко ные р оввни Изобретение относится к автоматике и вычислительной технике и предназначено для управления двухсуппортными токарными станками.Известны системы программного управ- Ь ления для двухсуппортных токарных станков, содержащие первый и второй коммутвторы, первую и вторую схему ИЛИ". и третий и четвертый коммутаторы, выходы которых соединены с входами первого и вто- рого блоков упрввления соответственно и с входами третьей и четвертой схемы "ИЛИ" соответственно. им системам .свойственна огрвммироввния. 1 Ь влении программ необходимо беспечить разнесение во вре ов прохождения инструментвпортов зон пересечения трав свою очередь накладывает ничения нв возможность искоррекций скоростей подач, ения, адаптивного упрввлеогических обмоток, твк квк жимы нврушвют временное движений. Уменьньшение вероятности возникновения аварийных сит ции достигается путем увелич времени межцу моментвми пе рвектории инструментов, что стродействие системы.Цель изобретения - упрощенировдння и повышение быстроистемы. Достигается это благодаря тому что в систему дополнительно введены устройство вычисления взаимного положения инструментов суппортов и блокировки и двв устройствв переключения. Выходы блоков управления через последовательно соединенные устройство вычисления взаимного положения инструментов суппортов, подключенное через устройство блокировки ервому коммутатору, с г упрввления, второй к схему "ИЛИ и второ лючения подсоединены третьего и четвертог входу первого устройсвыходы которого свя т его и четвертого кол юго усчройствв перекг через первую гг у,б 10 15 торой объединены с соответствуюшими входами блоков управления третьдго и четвертого коммутаторов, подключен к другим входам второго коммутатора. Соответствующие выходы первого и второго .блоков унравления соединены с одним извходов устройства блокировки и третьей иичетвертой схемой "ИЛИ соответственно ичерез второй коммутатор - со входамитретьего и четвертого коммутаторов соответственно. Кроме того, устройство блокировки содержит последовательно соединенные первый триггер, первую схему "И"и второй триггер и последовательно соединенные третий триггер, вторую схему"И" н четвертый триггер, причем единичные входы первого и третьего триггеровобъединены с одним из входов второй ипервой схем И" соответственно, их нулевые входы - с нулевыми входами второго и четвертого триггеров соответственно, единичные выходы второго и четвертого триггеров и входы первого итретьего триггеров соединены. с выходами и входами устройства соответственно.На фиг. 1 - блок-схема предлагаемойсистемы, на фиг. 2 -. схема устройстваблокировки.Система состоит .изпервого блока управления 1, второго. блока управления 2,первого коммутатора 3, устройства блокировки 4, устройства вычисления взаимного положения инструментов суппортов 5, второго коммутатора 6, первой7 и второй 8 схем "ИЛИ" соответственно, первого 9 и второго 10 устройствапереключения соответственно, третьегои четвертого коммутаторов 11 и 12 соответственно, и третьей и четвертой схем"Чистовая (черновая) операция" блоков 1и 2 подключены к входам блоков 4 и 6,Выходы сигналов "отключение подключение) блокировок блоков 1,2 присоединенык управляющим входам блока 3, управляемые выходы которого подклочены к выходам устройства блокировки 4, а выходывходам сигналов "запрещение пуска"блоков управления 1 и 2. Выходы сигналов технологических команд смены инструментов блоков управления обоих суппор тов 1 и 2 подключены к входам устройства вычисления взаимного положения инструментов 5, один из выходов сигнала от 4вод" которого подключен к входу устройства блокировки 4, а второй выход сигнала "Отвод" и выход сигнала Подводподключены к входам второго коммутатора 6. Выход сигнала Отвод первого суппорта" блока 6 присоединен к входу сигнала "Технологический останов" блока 1, кодному из управляющих входов третьегокоммутатора 11 и через вторую схему . "ИЛИ" к входу сигнала Отвод устройства переключения 10, а выход сигнала"Отвод второго суппорта присоединенаналогично к входам блоков 2, 12 ичерез схему "ИЛИ" 8 к устройству пере. услючения 10.Выход сигнала "Подвод первого суппорта блока 6 подключен ко второмууправляюшему входу коммутатора 11 ичерез первую схему "ИЛИ 7 к входу . сигнала "Подвод" блока 9, а выход сигнала "Подвод второго суппорта присоеди, нен аналогично к входу четвертого коммутатора 12 и через схему "ИЛИ 7 кустройству 9.Выходы управляющих сигналов устройств 9 и 10 подключены ккоммутируемым входам оммутаторов11 и 12. Выход сигнала Окончание от, вода" устройства 9 подключен ко входусигнала Отвод" устройства 4, а выход9 подключен к входу сигнала Подводустройства" 10, Выход сигнала "Окончание подвода" устройства 10 подключенк коммутируемым в ходам коммутаторов сигнала "Окончание подвода" устройства 11 н 12, соответствующие выходы которых подключены к входам сигналов "Тех,нологический пуск" блоков 1 и 2, Выходытретьей и четвертой схем "ИЛИ" 13, 14 присоедийены к входам схем управления, йриводами станка.Устройство блокировок 4 состоит изтриггеров 15-18 и схем И 19, 20. Выход сигнала : Черновая операция " первого блока управления подключен к единичномувходу триггера 15 и входу схемы "И 20.Выход сигнала "Черновая операция"первого блока управления подключен к нулевым входам триггеров 15, 17. Выходсигнала "Чистовая операция" первого блока управления п)дключен к единичномувходу триггера 15 и входу схемы "И" 20.Выход сигнала "Черновая операция" второго блока управления подключен к нулевым входам триггеров 16 и 18. Выход сигнала "Чистовая операция" второго блока управления подлычек к единичному ,входу триггера 18 и вюду схемы И" 19, Единичный выход триггера 15 присоединенко входам схемы "И 19, а единичный вы 484938ход триггера 18 - к. входу схемы И20. Выход схемы "И" 19 присоединен кединичному входу триггера 17, а выходсхемы. ".И" 20 - к единичному входу триггера 16. Единичные выходы триггеров 16,17 йрйсоедщены к выходным клеммам сит-,налов "Запрещение пуска" первого и второго блоков управления,Система работает следуюшим образом.Программа обработки детали выполняется в виде двух независимых перфолент,одна из которых является программой первого суппорта, например токарного, вторая - второго, например расточного, Каж 1дая из программ составляется независимо 15от другой так, как будто обработку детали предполагается вести последовательно,а не одновременно. Это коренным образомупрошает составление программ и делаетвозможным использование стандартных Юязыков автоматического программирования,Для исключения брака в результате одновременной обработки детали инструментами обоих суппортов в программах используются.три специальные команды. Коман- фда " Чистовая операция указывает на то,что прерывать выполнение инструментомданного прохода недопустимо по технологическим соображениям, Отсутствие этойкоманды в кадре программы воспринимается системой, как команда "Черноваяоперация". Команда Подключение блокировок и команда "Отключение блокировокиспользуется только в том случае, еслинри обработке детали имеет место пересечение траекторий чистовых операций инструментов первого и второго суппортов.Условием возникновения возможности,столкновения одновременно работаюших инструментов обоих суппортов является одновременнре выполнение двух неравенствХ +ХХ(а), У +У У(б),где, Х, У и Х, У - текущие коорди 1. 1 . 2 2наты олижайших точек, работаюших инструментов первого и второго суппортов, аХ, У - расстояния между нулевыми положениями инструментов обоих суппортов.Для автоматического исключения столкновений в системе автоматически осушеств-к 0ляется непрерывное слежение за взаимнымположением работаюших инструментов обоих суппортов, При этом определяется возможность столкновения инструмента с некоторым упреждением блогодаря решениюнеравенствХ + ХХ-Х(в) У + У У -У (г1 2 1 2гдето Х иА У предохранающие расстояния,т.е. расстояния между ближними точкам инструментов в момент прерывания систе-мой программы работы одного из суггпортов,При обрабдтке деталей возможны трислучая, каждый из которых определяет,особый режим работы системы,П е р в ы й с л у ч а й. При обработке детали инструменты обоих суппортоводновременно ни разу не занимают одну иту же рабочую зону. В этом случае неравенства (в) и (г) не выполняются одновременно.Второй случай. Приобработке детали инструменты обоих суппортов могут занимать одну и ту же рабочуюзону, т.е. неравенства (в) и (г) выполняются одновременно, но в этот момент хотя бы оин из инструментов выполняет черновую операцию,Третий случай, При обработке детагпг инструменты обоих суппортов могут занимать одну и ту же рабочую зону,т,е, неравенства (в), (г) выполняются одновременно и в этот момент оба инструмента выполняют чистовые операции.В первом режиме система работаетследуюшим образом. Программа первогосуппорта вводится в блок управления 1,например интерполятор, и с его выходовуправляющие сигналы + Х, + У в виде1 1унитарных кодов поступают на входы ус тройства вычисления взаимного положенияинструментов суппортов 5 и через схемы"ИЛИ 13 на выход системы. Программаработы второго суппорта вводится в блокуправления 2 и с его выходов управляю -шие сигналы + Х, + У поступают на2 - 2входы блока 5 и одновременно через схемы. "ИЛИ 14 на выход системы. Сигна,лы+ Х, + У и+ Х и+ У исполь 1 1 2 2зуются в блоке 5 для определения моментаодновременного выполнения неравенства(в) и (г). Кроме того в блок вычислениявзаимного положения инструментов 5 поступают сигналы технологггческнх командсмены инсгрументов обоих суппортов пзб доков 1 и 2 , что позволяет автоматически учитывать изменение размеров работа-ющих инструментов при их сливене. Поканеравенства (в) и (г ) не выполиютсодновременно блок 5 никаких сигналов певырабатывает, и оба блока управения 1и 2 работают совершенно независимо писвоим програллалькоторой режим работы возгшкае г в тот) момент, когда блок 5 обнаружива. т одновременное вылолненне неравеги: гв (в) ц(г). При этом он вырабатывает свгпали ( Отвод, который поступает на вход ком 484938мутатора 6, на управляюшие входы кото-рого воздействуют сигналы "Чистовая (черновая) операция" первого и второго блоков управления задаваемые в программах. Блок 6 вырабатывает сигналы "Отвод первого суппорта" или " Отвод второго суппорта" по специальному алгоритму, от которого в значительной степени зависит производительность станка. Так, если один из суппортов выполняет черновую опе рацию, а другой - чистовую, то коммутатор 6 вырабатывает сигнал фОтвод" того супнорта, который ведет черновую обработку. В случае, если оба суппорта выполняют , черновые операции, то вырабатывается, 15 с игнал "Отвод суппорта ф, имеющего леньшее время обработки при изготовлении данной детали,. так как его простой не скажется на общее время изготовления детали, и, следощельно, не снизит производительность станка. Пусть в соответствии с описанным алгоритмом коммутатор 6 вырабатывает сигнал "Отвод первого суппорта", Этот сигнал поступает па вход сигнала "Технологический останов" блока управления 1, и прерывает его работу. Одновременно он поступает на управлявший вход коммутатора 11 и через схему ИЛИ" 8 на вход устройства переключения 10. Это устройство вырабатывает сигналы отвода, которые через коммутатор 11, открытый сигналом "Отвод первого суппорта" и схемы " ИЛИф 13; поступиют на выход системы по каналу У и обеспечивают отвод первого суппор-;р. га по координате У до некоторой точки,1фпкпрова иной специальпылл, подвижным ыли неподвижным маркером. после чего устройтво 9 вырабатывает сигнал "Окончиние отвода", который поступает на вход 40 .игнацу "Отвод" устройства 9.По этому сигналу устройство 9 вырабатывает нгнилы, которые через коммугатор 11 и схемы "ИЛИ" 13 поступают ца вход св-.емы по каналу Х и обеспе 451чивают огвод первого суппорта по координате Х до некоторой точки так же фикси)ровопиой ис цнольпым подвижным или неподвп.мьвмирлером, В это время инструмент второго суппорта продолжает вы 60полнение операций в зоне, которую освободил для него первый суппорт. При этомго перомегиения фиксируются в блоке 5вычисления взаимного положения инстру 55ментов и кик только он покинет зону, которую занимал первый суппорт до отвода,го хотя бы одно из неравенств (в) или(и) н рушитя, При этом блок 5 выраба-ивиеч св нил "Подвод первого суппорта".60 Сигнал этот поступает на второй управля-юший вход коммутатора 11 и через схему "ИЛИ" на вход сигнала "Подвод" устройства 9. Устройство 9 вырабатываетуправляющие сигналы, которые поступаютчерез коммутатор 11 и схемы "ИЛИ" 13на выход системы по координате + Х и1обеспечивают возврат первого суппортав точку, из которой он был отведен. После этого устройством 10 вырабатываетсясигнал"Окончание подвода, который поступает в устройство 9 в качестве сигнала "Подвод". По этому сигналу блок 9вырабатывает управляющие сигналы подвода, которые поступают на выход систе-мы по каналу +У через коммутатор 11и схемы "ИЛИ" 13, что обеспечивает возврат суппорта по координате У в точку,1в которой он находился до отвода,После чего устройство 10 вырабатывает сигнал "Окончание подвода", который через коммутатор 11 поступает навход сигнала Технологический пуск" первого блока управления 1. По этому сигналу блок 1 возобновляет обработку про- ,граммы и первый суппорт заканчивает операцию, ранее прерванную, для того, чтобы освободить риоочую зону инструментуьторого суппорта, В случае, если в соответствии с описанным алгоритмом, комлутатор 6 вырабатывает сигнал "Отводвторого суппорта", то в силу симметриисхемы, система совершенно аналогичноотведет второй суппорт, с последующимвозврашепием его на место, при этомпрерывается работа блока унравления 2и используются колмутатор 12 и схемы"ИЛИ" 14,Третий режим определяется возможностью возникновения ситуации, когда инструменты обоих суппортов выполняет чистовые операции и появляется необходимость прервать работу одного из них, что приведет к браку обрабатываемой дс тали по чистоте поверхности. Чтобы это-го не случилось, в систему введено утройство блокировки 4 и коммутатор 3. В про ромме каждого из суппортов зе нес. -колько каиров до чистовой операции, зона которой пересекается с зоной чистового прохода инструмента другого суппорта, записывается команда "Подключение блокирооок", которая с выходов блоков упривления 1 или 2 поступает на коммутатор 3, после чего он начинает пропускать выходпыс сигналы устройства блокировки 4 к соответствуюшим входам блоков управления .1 и 2, На выходы блоки 4 поступают си палы чистовия оперы 484938тция" с первого и второго блоков управ 1ления 1 и 2 и сигнал Отвод с выходаУ ФГустройства 5. Устройство блокировки 4вырабатывает сигналы, запрещающие обработку очередного кадра программы бло-.ками управления 1, 2 по ниже следующему алгоритму.Если первый суппорт выполняет чис,товую операцию, а второй так же собирается выполнять чистовую операцию, то 1 10устройство 4 вырабатывает сигнал "Блокировки" обработки кадра программы вто-:рого блока управления. Сигнал этот будет присутствовать на выходе устройства4 до тех пор, пока первый суппорт не 15закончит чистовую операцию, после чегоон исчезнет и блок 2 начнет обработкуследующего кадра, Если к моменту прихода кадра программы участка чистовойобработки первого суппорта, второй ужевыполняет чистовую обработку, то будетвыработан сигнал "Блокировка" отработкикадра второго суппорта. Таким образом,если на коммутатор 3 поступил сигнал"Подключение блокировок , то выходныеи 25сигналы устройства 4 делают невозможной ситуацию при которой необходимо пре-;рвать выполнение чистОвой операции, таккак исключается возможность одновре -30менного выполнения двух чистовых опе-раций. По окончании чистовой обработкиучастка, на котором возможно столкновение инструментов при выполнении чистовых операций, в программе задается команда "Отключение блокировокф, которая1закрывает ключи коммутатора 3, так какпостоянное воздействие выходных сигналов устройства 4 на блоки 1 н 2 бесполезно и вызовет лишь снижение произво. дительности станка,Поскольку устройство вычисления взаимного положения инструментов реагируетна одновременное выполнение неравенств (в) и (г) независимо от момента их 4возникновения, то очевидно, что свободное использование ручных коррекций,скоростей подач, стружкодробления, адаптивного управления и технологических остановок не можем нарушить работу систе- щмы, а лишь сдвинет во времени моментывмешательства устройств 3-12 в обработ-ку детали по заданным программам, Производительность станка, оснащенного такой системой, в силу оптимизирующих алгоритмов блоков 4-6 всегда выше, чему стокбв оснащенных обычными системами, кроме того она не зависит от квалиФИкации технолога-программиста.Устройство блокировок 4 работает сле 10дующим образом. Первоначально все триг-геры блока находятся в нулевом состоянии,поэтому сигналы блокировок на единичныхвыходах триггеров 16, 17 отсутствуют,Сигналом Чистовая операция" первогосуппорта триггер. 15 устанавливается всостоянии "1 ", но состояние триггера16 не изменится, так как схема "И" 20закрыта по второму входу нулевым сигналом триггера 18. Если теперь придет сигнал "Чистовая операция" второго суппорта, то он установит в "1 " триггер 18 ичерез схему "И" 19, открытую сигналом"1" триггера 1 5, установит в "1" триггер, на единичном выходе которого появится сигнал "Блокировка" пуска блока управления 2 второго суппорта.Сигнал "Черновая операция" первогосуппорта установит в нулевое положениетриггера 15 и 17. При этом сигнал "Блокировка пуска блока управления второгосуппорта Исчезнет.Если первым придет сигнал "Чистоваяоперация " второго суппорта, а вторым -"Чистовая операция первого, то в силусимметрии схемы блока будет выработансигнал "Блокировка".пуска управленияпервого суппорта,Предмет изобретения1, Система программного управлеия двухсуппортным токарным станком, содержащая первый и второй коммутаторы,первую и вторую схему ИЛИ" и третий и четвертый коммутаторы, выходы которых соединены со входами первого и второго блоков управления соответствешо и со входами третьей и четвертой схемы "ИЛИ" соответственно, о т л и ч а ю - ш а я с я тем, что, с целью упрошения программирования и повышения быстродействия системы, в нее введены устройство вычисления взаимного положения инстру( ментов суппортов и блокировки и два устройства переключения, причем выходы блоков управления через последовател о соединенные устройство вычисления взаимного положения инструментов суппортов, подключенное через устройство блокировки к первому коммутатору, связанному с блоками управления, второй коммутатор, вторую схему ИЛИ" и второе устройство переключения подсоединены к одним из входов третьего и четвертого коммутаторов и ко Йходу; первого устройства переключения, аходы которого связаны со входами третьего и четвертого (коммутаторов и второго устройства пе484938 реключения, а другой вход через первую схему "ИЛИф, входы которой объединены с соответствуюшими входами блоков управления третьего и четвертого коммутаторов подключен к другим входам второго коммутатора, и соответствуюшие выходы первого и второго блоков управления соединены с одним из входов устройства блокировки и третьей и четвертой схемой "ИЛИ соответственно и через второй коммутатор - со щ входами третьего и четвертого коммутаторов соответственно.2, Система по и. 1, о т л и ч а ю - ш а я с я тем, что устройство блокиров 12ки содержит последовательно соединенные первый триггер, первую схему "И" и второй триггер и последовательно соединенные третий триггер, вторую схему И" и четвертый триггер, причем единичные входы первого и третьего триггеров объединены с одним из входов второй и первой схем "И" соответственно их нулевые входы с нулевыми входами второго и четвер-того триггеров соответственно, единичные выходы второго и четвертого триггеров и входы первого и третьего триггеров соединены с выходами устройства соответственно.484938 Составитель Н.БелинковаТехред В,Доя Редактор Е.Гончар Корректор П.Аун Заказф/ Изд, М (р Тираж 1061Подписное.ЦНИИПИ Государственного комитета Совета Министров СССРпо делам изобретений и открытийМосква, 113035, Раушская наб 4 Предприятие сПатент, Москва, Г.59, Бережковская иаб., 24
СмотретьЗаявка
1942821, 13.07.1973
ПРЕДПРИЯТИЕ ПЯ В-2190
КОШКИН ВЛАДИМИР ЛЬВОВИЧ
МПК / Метки
МПК: B23B 11/00, G05B 19/418
Метки: двухсуппортным, программного, станком, токарным
Опубликовано: 25.09.1975
Код ссылки
<a href="https://patents.su/8-484938-sistema-programmnogo-upravleniya-dvukhsupportnym-tokarnym-stankom.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления двухсуппортным токарным станком</a>
Устройство для контроля блоков передачи информации

Номер патента: 584323
Опубликовано: 15.12.1977
Авторы: Бормот, Воробьева, Мордовкина
МПК: G08C 25/00
Метки: блоков, информации, передачи
...10. Выход первого дополнительного элемента ИЛИ 10 со О единен с единичным входом первого дополнительного триггера 11, нулевой вход которого соединен с выходом второго дополнительного элемента ИЛИ 12. Первый вход второго дополнительного элемента И 18 соединен с выходом делителя частоты 13, а второй вход60 С 5 5соединен через второй дополнительный элемент задержки 14 с единичным выходом второго дополнительного триггера 15. Импульсный выход последнего разряда счетчика количества слов 16 соединен с первым входом второго дополнительного элемента ИЛИ 12, а импульсный выход предпоследнего разряда этого счетчика соединен со вторым входом второго до олнительного элемента ИЛИ 12 и с единичным входом второго дополнительного триггера 15. Вход...
Устройство определения конца блока циклического кода

Номер патента: 1061279
Опубликовано: 15.12.1983
Авторы: Бердников, Лосев, Орлов
МПК: H04L 7/04
Метки: блока, кода, конца, циклического
...вспомогательных кодовых комбинаций на первые входы двенадцатого и тринадцатого элементов И 17 и 18 поступает сигнал высокого уровня с нулевого выхода триггера 21 фазирования, что соответствует отсутствию режима фазирования:При синфазном приеме информации. в результате декодирования вспомогательных кодовых комбинаций на выходах обоих регистров 2 и 3 сдвига с обратными связями получаются нулевые остатки, а на выходе инвертора 5 сигнал высокого уровня, означающий синфазную работу устройства.В случае нарушения синфазной работыпосле декодирования вспомогательных кодовых комбинаций в регистрах 2 и 3 сдвига с обратными связями получаются ненулевые остатки. Сигналом высокого уровня с выхода первого элемента ИЛИ 27, объединяющего выходы...
Устройство для контроля блоков обнаружения и коррекции ошибок, работающих с кодом хэмминга
Номер патента: 1072050
Опубликовано: 07.02.1984
Авторы: Аверьянов, Верига, Овсянников, Яловега
МПК: H03M 13/51
Метки: блоков, кодом, коррекции, обнаружения, ошибок, работающих, хэмминга
...блоков обнаружения и коррекции ошибок, работающих с кодом Хэмминга.Устройство содержит информационный регистр 1, регистр 2 контрольных разрядов, блок 3 обнаружения и коррекции, триггер 4 имитации одиночной ошибки, триггер 5 запуска оперативного контроля, триггер б коррекции одиночной ошибки, триггер 7 результата проверки, счетчик 8 числа одиночных ошибок, элемент ИЛИ 9, элемент И 10, информационные входы 11,. тактовый 12 вход, вход 13 пуска, вход 14 сброса, информационный выход 15 контролируемого блока н контрольный выход 1645 генаратор 17, дешифратор 18, корректор 19 и сигнал 20.Информационные 11, тактовый 12входы, вход 13 пуска устройстваподключены к информационным, тактовым и первому управляющему входаминформационного....
Устройство для контроля блока воспроизведения

Номер патента: 1324063
Опубликовано: 15.07.1987
Авторы: Дебальчук, Малахов, Солошенко, Черный
МПК: G11B 27/26
Метки: блока, воспроизведения
...ключа 10 поступает отрегулированный по амплитуде с помошью аттенюатора 4 синусоидальный сигнал. В результате на выходе аналогового ключа 10 формируется кодовая последовательность усеченных по фронтам синусоидальных импульсов (фиг. 2 г), которая при прохождении через фильтр 11 низких частот преобразуется в кодовую последовательность колоколообразных импульсов (фиг,2 д), т.е. в форму, близкую к форме реальных сигналов, воспроизводимых с ленты магнитной головкой цифрового аппарата магнитной записи, причем благодаря усечению фронтов синусоидальных импульсов удается добиться большой плотности колоколообразных импульсов (например, первый и второй импульсы на фиг. 2 д). Кодовая последовательность колоколообразных импульсов отображается на...
Устройство для контроля блока постоянной памяти

Номер патента: 235108
Опубликовано: 01.01.1969
Автор: Скоеородин
МПК: G11C 17/00, G11C 29/00
Метки: блока, памяти, постоянной
...установки. Это позволяет упростить устройство и повысить его быстродействие.На чертеже изобракена блок-схема контрольного устройства. 20При подаче ца вход блока 1 постоянной памяти кода адреса и импульса запроса с выхода считывается тт-разрядное число.Устройство для контроля блока 1 постоянной памяти с контролем на четкость содержит ре гистр параллельного действия 2 со счетными входами 3, подключенными к выходным шинам блока 1, узел установки контрольной суммы 4 и схему сравнения 5, соединенную с регистром 2 и узлом 4 установки. ЗО После считывания всех чисел блока 1 в регистре 2 будет записана поразрядная сумма, которал при приходе сигнала сравнения срав цивается с контрольной суммой установленной в узле 4 установки. Если суммы...
Предыдущий патент: Способ механической обработки нежестких деталей
Следующий патент: Устройство для определения износа инструмента
Случайный патент: Способ соединения титановых сплавов с алюминиевыми