Рабочее оборудование одноковшового гидравлического экскаватора конструкции даниленко н. д. и мещерякова а. ф.
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
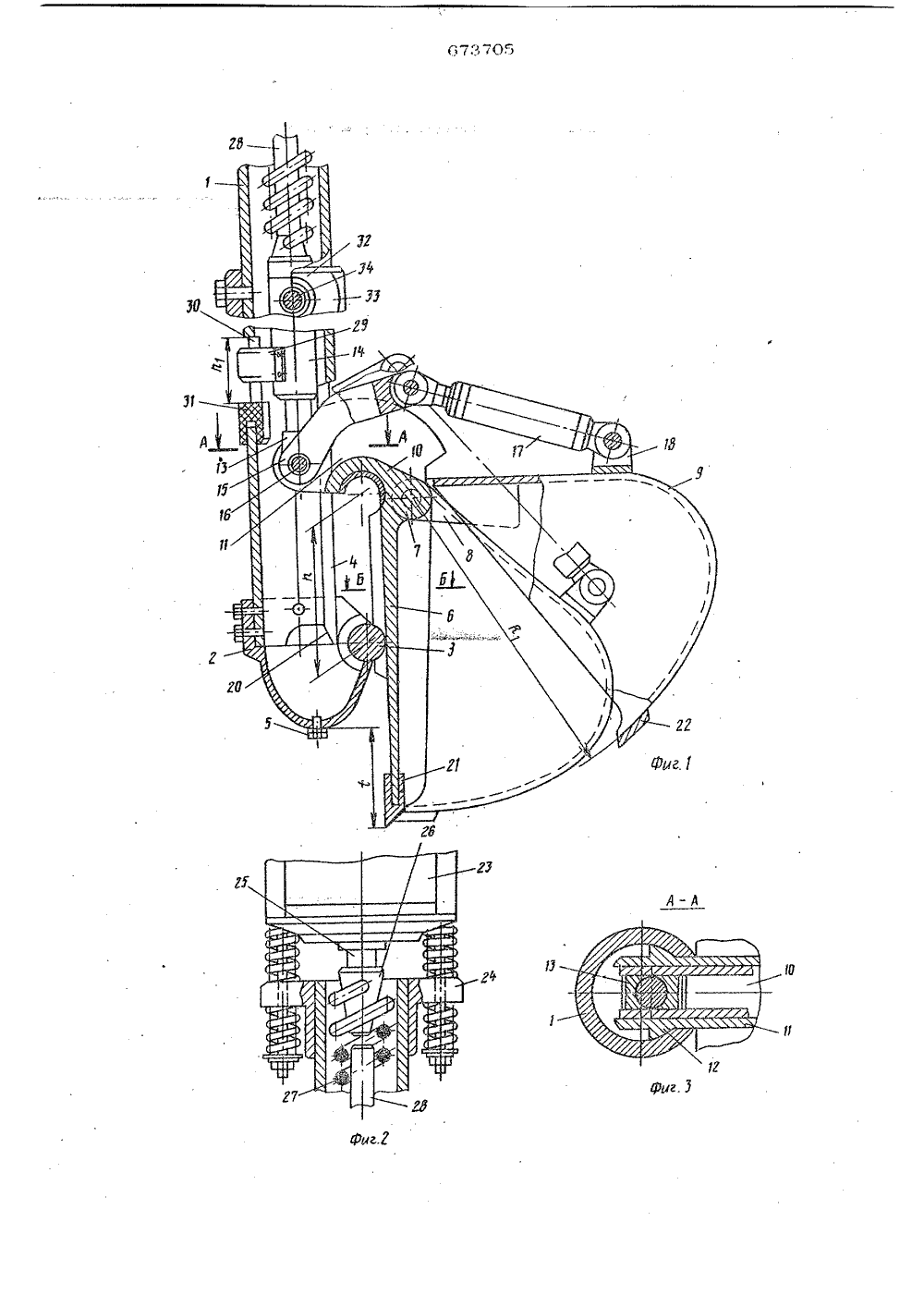
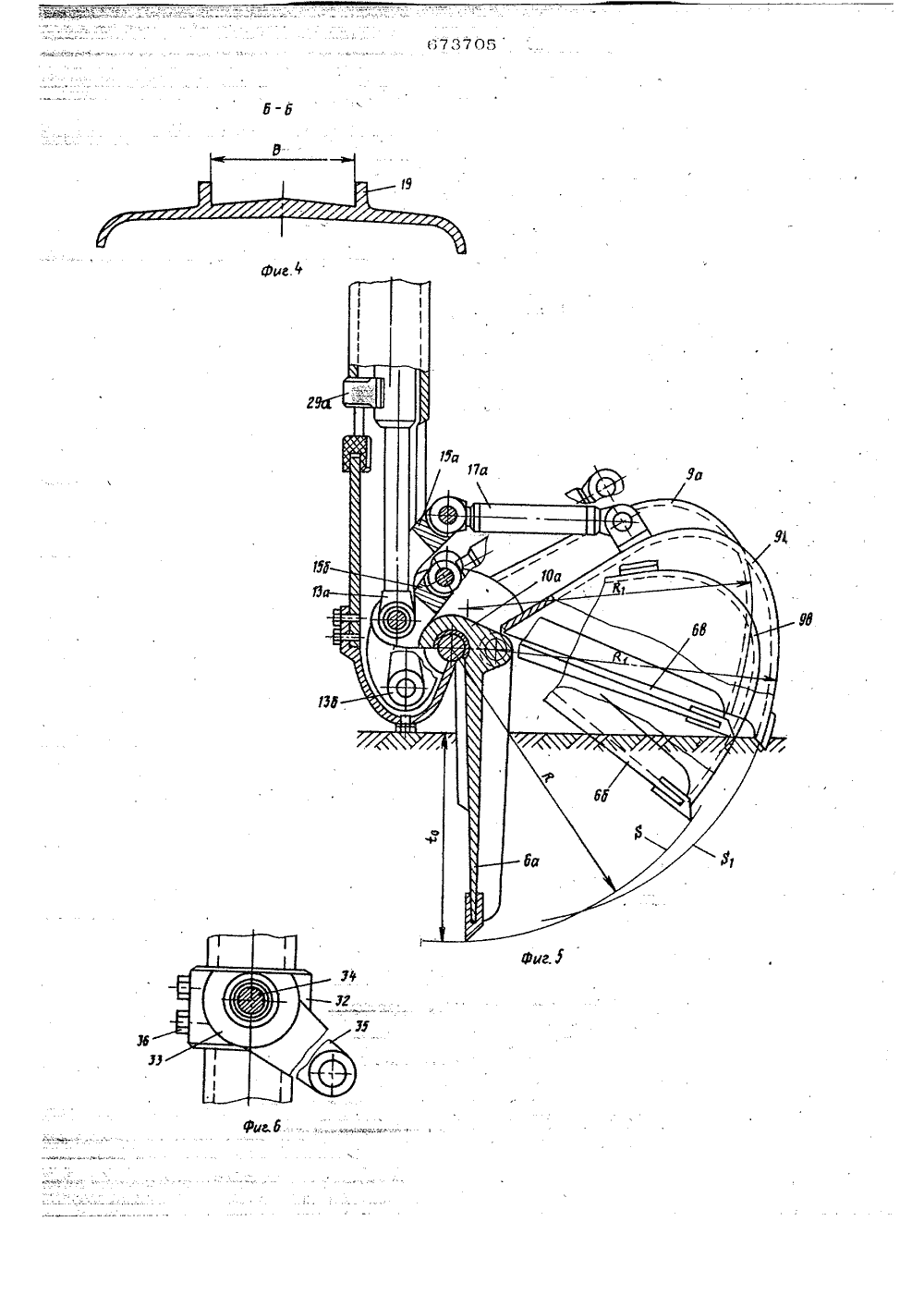
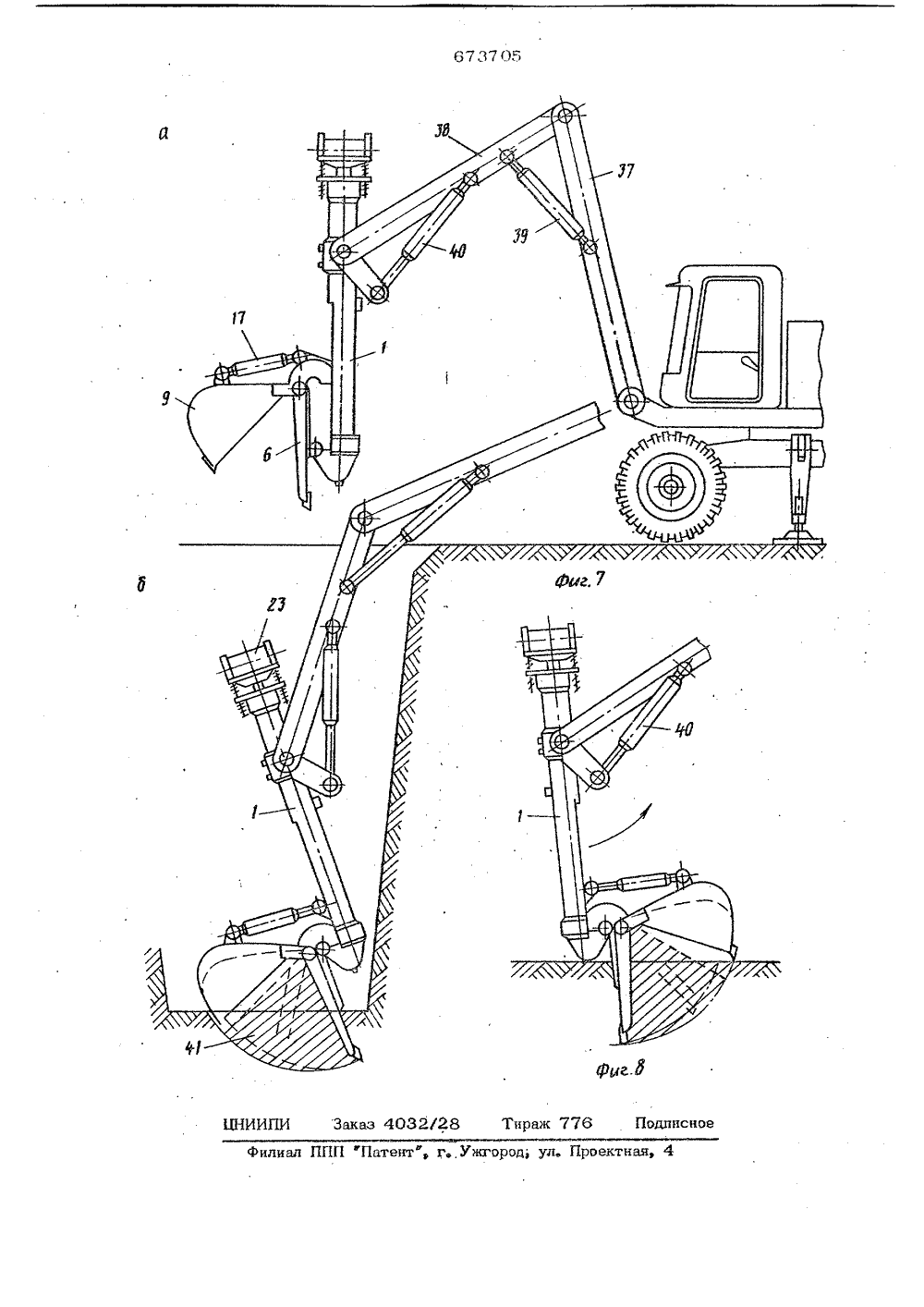
Союэ Соеетскин Социалистицеснин Республик(61) Дополнительное к авт. сви 51) М. КлЕ 0203/3 Е 020 3/3 76 121) 2411аявки2) Заявлено 1 ,1 присоединением Гасударственный немет СССР. не делам нзебретвннй н етнрютнй(54) РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА КОНСТР ДАНИЛЕНКО Н, Д. И МЕШЕРЯКОВА А. Ф,стр 26 Изобретение относится к строительст- ву и предназначено для оснащения экскаваторов и погрузо-разгрузочных машин.Известно рабочее оборудование одноковшового гидравлического экскаватора, включающее стрелу, рукоять, ковш, шар нирно прикрепленный к рукояти, свозможностью поворота в вертикальной плоскости и гидроцилиндры управления стрелой, рукоятью и ковшом 11Рабочий процесс экскавации грунта известным оборудованием складывается из. следующих операций: а) опускание ковша на подошву забоя; б) подъем ковша к горловине стрелы с периодическим выдвижением рукояти, обеспечивающее непрерывное резание грунта; в) втягивание по окончании процесса резания рукояти с ковшом по направлению к оси вращения (от- вод ковша от забоя) и поворот платформь на требуемый угол с постановокой ковша над местом выгрузки; г) открывание днища для высыпания грунта; возвращение ковша в исходное положение. Однако рабочее оборудование известного экскаватора работает недостаточно эф-фективно по ряду причин, главными изкоторых являются следующие: необходимость продвижения ковша на значительном 5 расстоянии по поферхности забоя; ограниченность типа забоя (верхний, нижний)определяемая типом лопаты (прямая, обратсная); ограниченное плоскостью вращениястрелы направление движения резания ковша; невозможность применения для работна воде для очистки углубления водоемов,каналов и отрывки колодцев.Известно также рабочее оборудованиеодноковшового экскаватора, включвквцееелу, рукоять, ковш, шарнирно приклепленный к рукояти с воэможностью повогрота в вертикальной плоскости, и режущийэлемент на рукояти 121Недостатком этого оборудования является низкая эффективность разработки лотных грунтов.Целью изобретения явпяется повышениеффективности разработки грунта путем673705 30 3резания со сдвигом наружу и заполнением ковша.С этой целью операция наполнения ковша путем поверхностного резания с продвижением его по поверхности забоя заменена на глубинное резание с последующим сдвигом грунтового клина по криволинейной поверхности с одновременным за- полнением активно действующего ковша. Для этого режущий элемент выполнен в виде совковой лопаты и имеет гицроципиндр его выдвижения, к которому шарнирно закреплен ковш с гидроцилиндром поворота; а в верхней части рукоять оснащена вибромолотом, кинематически свя-15 занным с режущим элементом., На фиг. 1 - рабочее оборудование в :разрезе; на фиг. 2 - головная часть рукояти.с вибромолотом; на фиг, 3 - сечение Л-Афиг. 1 нафиг,4-сечениеБ-Бфиг. 1 на фиг 5 - рабочее оборудование в разрезе в рабочем состоянии; на фиг. 6 - часть рукояти с полноповоротной муфтой для крепления гуська стрелый"ее силового ци-25 линдра; на фиг. 7 а - пример оснащения колесного экскаватора по схеме прямой лопаты; на фиг 7 б- рабочее положение органа; на фиг. 8 - оснащение гуська стрелы экскаватора рабочим органом по схеме обратной лопаты.Конструкция рабочего органа экскаватора содержйт рукоять 1 со съемной фасонной крышкой 2, оснащенной поворот ной осью 3, вынесенной за контур прорези 4, и снабженной сливной пробкой 5. Доната 6 совкового профиля выполнена с развитым по ее ширине затыпьником 7, к которому на папьцах и ппанках 8 закреппен грейферный ковш 9, ачасть за 4 О тыльника выполнейа в виде разрезной поворотной ступицы 10 с длиной равной. дпине поворотной оси, К ступице приваре. ны две направпяюц 1 ие шеки 11, ппоскос ти которых частью размещены внутри по 45 лости рукояти и снабжены ограничителями , поворота 12, выполненными заодно со щеками. Соединяются щеки с проушиной 13 штока силового цилиндра 14 совместно с вилочным поводком 15 выбивным5 о пальцем 16 (при снятой крышке 2). Выс- тупающий за контур прорези конец поводка с проушиной соединяется пальцем с проушиной штока силового цилиндра 17 подъема-опускания грейфера, снабженного55 с проушиной 18, Дпя, предотвращения п рескоков лопата на тыльной поверхностиснабжена направляющими ребрами заплечиками 19 с размером "в между ними,4равным длйце поворотной оси по сводной посадке, одновременно ребра служат для повышения жесткости лопаты. Дпи исключения заедания ограничителей поворота щек при выходе их из движения поворота и установке для направленного движения вверх (на величину Ь ) на торцах стенки, примыкающих к прорези изнутри выполнены фаски 20, На конце лопата оснащена режущей составной кромкой 21, а грейфер - кромкой 22. Тонким контуром показано транспортное положение грейфера.Для работы на плотных грунтах рабочее оборудование оснащено вибромолотом, 23, закрепленным на съемном поворотном оголовке 24, установленным на кон-. це рукояти. Ударник 25 вибромолота соединен на резьбе с переходником 26, к которому. присоединена пружина 27, служащая подвеской силового цилиндра лопаты. Нижний конецпружины соединен с. крышкой корпуса цилиндра, к которой с возможностью регулирования.зазора между ударной частью переходника закреплена ударная штанга 28. Ограниченное направленное возвратно-цоступательное движение. корпуСа силового цилиндра 14 лопаты обеспечивается ограничителем хода 29, размещенного в прорези 30, нижняя торцовая кромкакоторой оборудована резино-металлическим демпфером 31. Длина прорези "И " определяется исходя из упругих свойств пружинной подвески, и рабочих характеристик вибромолота, а зазор между верхней торцовой кромкой прорези и ограшИителем хода не должен превышать зазора между штангой и переход ником.Для закрепления рабочего органа к гуську стрелы экскаватора служит полно- поворотная муфта 32 .с лысками 33 ипальцами 34. В нижней части муфты заодно выполнен кронштейн 35 с прошиной для крепления штока силового цилиндра гуська. Крепится муфта болтами 36, для которых по периметру рукояти выполнен ряд гнезд с возможностью разворота муфоты на 90Работает рабочий орган следующим образом.Грейферный ковш 9 из транспортного.положения с помощью силового цилиндра17 открывается с возможной в свободном состоянии полнотой. Лопата 6 с помощью сипового цилиндра 14 поднимаетсяГв краййее верхнее положение (лезвие лопать 1 выступает на величину1 "), при этом силовой цилиндр свободно подвешен на пружинной подвеске 27.В начале рабочего цикла производитсязаглубление лопаты 6 на глубину "ов положение 6 а (фиг. 6) при силовом перемещении штока с проушиной в положение13 а, Нож ковша 9 при этом опирается нвплотный грунт в попожение 9 а, Заглублению способствует работа вибромолота 23и опускание гуська стрелы экскаватора доупора крышки 2 рукояти 1 на грунт,Дальнейшая работа силового цилиндра14 вызывает перемещение проушины штока в положение 136 и совместное радиальное перемещение с пальцем 16 проушин шек 11 и поводка из положения 15 ав йоложение 156, и связанный с этим,поворот разрезной ступицы 10 вокруг оси3 и совместный поворот лопаты из положения 6 а (с промежуточным положением2066) в конечное положение бв, Работа ковша 9 при этом (плотный грунт) будетзаключаться в формировании объема грунта с частичным загпубпением режущейкромки в попожение 96. На грунтах сред 25ней плотности и рыхлых смыкание ковшас лопатой происходит ниже дневной поверхности и опредепится, например, ихпозициями 66 и Эв. При работе на слабыхгрунтах возможно заполнение ковша без30поворота лопаты а только пишь при работе силового цилиндра 17,При повороте лопаты ее режущая кромка описывает дугу с радиусом Я (фиг, 6),а кромка ковша, дугу с, радиусом й 135(фиг. 1).Соответствуюшие им поверхности реэания б и 5 близки к поверхности сдви 1га грунтового клина отпора, что обеспе.40чивает оптимальный режим работы лопаты и грейфера, Таким образом, рабочийцикл у рабочего органа происходит безпланового перемешения рукояти, нв четкоограниченной плошади забоя, Йапее следует цикл выгрузки, при котором рукоять45поднимается из забоя вертикально (снебопьшим наклоном в зависимости огФтипа оснащения: прямой или обратной лопатой) и в таком положении перемещает 50ся к месту разгрузки. Йля разгрузки ковша, в общем случае, в работе включаетсяцилиндр 14, обеспечиваюиий возврат лопаты в исходное положение (фиг. 1). Воз"вратное движение лопаты для сокращения55времени цикпа разгрузки выполняется впроцессе перемещения органа от забоя,Над местом разгрузки в работу включается цилиндр 17, раскрываюший ковш 9,6как показано на фнг. 1. Йертикапьность"лопаты и бопьшой наклон передней поверхности ков 1 пв обеспечивает попную выгруэку грунта. Йалее из этого попоженияцикл рабочего органа повторяется.Йпя рыхления поверхности грунта рукоять помещается нв высоте несколькобольшей величиныт "и рыхление производится лопатой при совместном действиисилового цилиндра 14 и вибромопота 23с плановым перемещением рукояти в месте намеченного забоя,Во всех случаях работы, когда сопротивление грунта резанию превзойдет величину сжатия пружины 27 силовой ципинцр14 переместится вверх и ограничительхода 29 займет крайнее верхнее попожение, поз. 29 в, фиг. 6. При этом штанга28 верхним концом соприкоснется с переходником 26, который с этого моментабуцет поджат пружиной. Работа ударника25 с переходником 26 будет обеспечиватьнри этом передачу ударной штанге, авместе с ней и корпусу силового цилиндра 14 и его штоку смягченные пружинойвысокочастотные удары, При атом возможно соуцарение ограничитепя хода с нижнейторцовой кромкой 1 прорези 30, снабженнойдемпферным эпементом 31. При выемкегрунта и разгрузке ковша ограничительхода силового цилиндра предотвращает рас-.тяжение пружины, а вместе с этим и изпишнюю нагрузку нв ударник вчбромолота.На фиг. 7 приведен пример оснащениярабочим оборудованием копесного экскаватора, оборудованного стрепой 37 с гуськом 38 и силовыми цилиндрами 39 и 40,обычными для современных одноковшовыхэкскаваторов. На фиг. 7 а показано взаимное положение лопаты 6 и ковша 9 с цилиндром 17 к началу работы, На фиг, 76показан рабочий орган в работе с наклонной рукоятью 1. Работа вибромолотв 23при атом вполне допустима. Звгпублениеполаты цпя сдвига грунтового клина 4 1в этом случае должно быть меньше, чемпри вертикальном положении рукояти.Положение рабочего органа, соответствуюшее работе обратной лопаты (фиг. 8),при котором рукояту 1 повернута вокругсвоей оси на 180, При таком оснашенииэкскаватора возможна работа с поворотомрукояти "на себя (как показано стрелкой),с помощьюсилового цилиндра 40 гуськастрепы.Йля работы нв ороситепьных внапах(при рытье траншей) большой протяженности орган уствнавпивается с поворотомна 90 по отношению к плоскости кате"няя стрелы с гуськом по варианту обратной лопаты, Экскаватор при атом движется вдоль канала (траншеи) на отмеченныеместа для стоянок, обеспечивающие наибопьщий вылет гуська с рукоятью,Положение рабочего органа при такойоснастке стрелы позволяет производитьработы с вертикальным образом профилязабоя без изменения направления движенияэкскаватора, что значительно сокращаетвремя работ и повьпиает производительность механизма.Широкое применение .рабочего органаможет получить для выполнения основныхи вспомогательных работ в сельскохозяй" ственном производстве, для рытья колодцев, силосных ям и траншей, расчистке(особенно слежавшихся) и для забивки вгрунт временных опор ограждений и опорвиноградников. Э последнем случае грейфер и лопата снимаются с рукояти совместно с рабочим силовым цилиндром ипружинной подвеской; а ударная штангана нижнем конце оборудуется подбабком,Применение рабочего оборудования позволяет повысить эффективность работыэкскаватора, а применение в работе новыхтехнопогических схем-сократить затратувремени и горючего и обеспечить выполнение работ в труднодоступных местах и в стесненных забоях, Паряду с этим экскаватор, оснапенный предлат аемым рабочим оборудованием. может выполнятьряп необходимых в сельскохозяйственномпроизводстве работ, недоступных обычньмэкскаваторам,Формула изобретенияОРабочее оборудование одноковщовогогидравпического экскаватора, включающее .стрелу, рукоять, ковш, шарнирно прикрепленный и рукояти с возможностью повороХта в вертикальной плоскости и режущийэлемент на рукояти,о т и и ч а ю щ е -е с я тем, что, с целью повышения эффективности разработки грунта путем Юрезания со сдвигом наружу и заполнением20 ковша, режущий элемент выполнен в видесовковой лопаты, и имеет гидроцилиндрего выдвижения, к которому шарнирнозакреплен ковш с гидроцилиндром поворота, а в верхней части рукоять оснащена25 вибромопотом, кинематически связаннымс режушим элементом,Источники информации, принятые вовнимание при экспертизе1. Беркман И. О, и др. Одноковщовыегидравлические экскаваторы, - М., 1973,с. 180, рис. 123.2. Авторское свидетельство СССРЦНИ 673705 аэ 403228 Тираж 776 Поддис илиад ППП "Патент", гУха ород; ул Проехтная
СмотретьЗаявка
2411932, 11.10.1976
ДАНИЛЕНКО НЕОНИЛА ДМИТРИЕВНА, МЕЩЕРЯКОВ АПОЛЛОН ФЕДОРОВИЧ
МПК / Метки
МПК: E02F 3/30
Метки: гидравлического, даниленко, конструкции, мещерякова, оборудование, одноковшового, рабочее, экскаватора
Опубликовано: 15.07.1979
Код ссылки
<a href="https://patents.su/7-673705-rabochee-oborudovanie-odnokovshovogo-gidravlicheskogo-ehkskavatora-konstrukcii-danilenko-n-d-i-meshheryakova-a-f.html" target="_blank" rel="follow" title="База патентов СССР">Рабочее оборудование одноковшового гидравлического экскаватора конструкции даниленко н. д. и мещерякова а. ф.</a>
Способ открытой разработки наклонных пластов полезных ископаемых и ковш экскаватора для его осуществления

Номер патента: 1024589
Опубликовано: 23.06.1983
Авторы: Ненашев, Рыбаков, Рыбакова
МПК: E21C 41/00
Метки: ископаемых, ковш, наклонных, открытой, пластов, полезных, разработки, экскаватора
...и егоразубоживания,Поставленная цель цостигается тем,что согласно способу открытой разработки наклонных пластов полезных ископаемых, включающему раздельную выемку пород вскрыши и полезного ископаемого сверху вниз ковшом экскаватора, выемку на контакте пороцы и полезного ископаемого произвоцят одновременно в продольном и поперечном направлениях с формированием улавливающего уступа после каждого черпания.Кроме того, ковш экскаватора цля осуществления способа открытой разработки наклонных пластов полезных ископаемых, состоящий из двух шарнирно сочленных 89полуковшей с механизмом поворота в продольном и поперечном направлениях,имеющих передние и боковые режущие кромки, режущие кромки снабжены зубьями,боковые грани которых срезаны на клини...
Ковш экскаватора

Номер патента: 604915
Опубликовано: 30.04.1978
Автор: Мухортов
МПК: E02F 3/40
Метки: ковш, экскаватора
...такого ковша является сложность его конструкции, так как для очистки используется дополнительный гидроцилиндр. Прп этом время на очистку ковша увеличивает время цикла работы экскаватора, а эффективность очистки не отвечае: трсбованиям вследствие налипания грунта на вь 1 гружатсле.Целью изобретения является и;гьппепие эффективности очистки ковша,Это достигается тем, что очистное устройство выполнено в виде рамки с зао:тренпой с двух сторон кромкой, размещенной внутри ковша и жестко закрепленнойа рук.ятп. а фиг. 1 схематически из ющийся ковш экскавато 1 о р рез А - А на фиг. 1. Ковш 1 экскаватора с дн 1 ской формы и боковыми ст проушинами 2, 3 с рукоятью поворотным цилиндром 5. 20 Внутри ковша размещено ство в виде рамки 6 с заостр рон...
Гидропривод управления ковшом гидравлического экскаватора

Номер патента: 1548367
Опубликовано: 07.03.1990
Авторы: Баладинский, Пелевин, Фомин, Шапиро
МПК: E02F 9/22
Метки: гидравлического, гидропривод, ковшом, экскаватора
...в нем возникновение поля напряжения. Одновременнорыхлитель 5 активного действия устанавливают с помощью гидроцилиндра 4управления рыхлителем 5 перед режущейкромкой ковша 6,При разработке прочных грунтовсопротивление грунта вызывает увеличение давления в гидросистеме. Приувеличении давления в гидросистемеклапан 12 закрывается, а клапан 11открывается и жидкость через клапаны 9 и 10 поступает в цилиндр 8. Таккак сила, действующая на поршень вцилиндре 8, равна произведению давления в системе на площадь его воздействия, то поршень двигается влево,так как шток, расположенный слева,уменьшает площадь, на которую воздействует жидкость, Поршень, двигаясьвлево, открывает выходное отверстиекорпуса цилиндра 8, ведущего в бесштоковую полость...
Ковш экскаватора “прямая лопата

Номер патента: 1565970
Опубликовано: 23.05.1990
Авторы: Кузнецов, Солохин, Шварц
МПК: E02F 3/40
Метки: ковш, лопата, прямая, экскаватора
...в плане в виде равнобокойтрапеции, которая торцовыми кромкамибоковых сторон соединена с торцовыми35кромками боковых стенок 1. Проушины5 для крепления ковша к рукояти расположены в вера нах меньшего основания трапеции и соединены между собой40посредством крепежных балок 10, которые жестко закреплены на задней стенке 4. Задняя стенка ковша выполненаиз отливок 11, связанных вставкой 12,а каждая боковая стенка, 1 образованавставкой 13, соединяющей торцовыекромки отливки 11 и переднейстенки6, В отливках 11 выполнены пазы 14для проушин 2 крепления ковша к навеске. закреплены на задней С 4, При работековша усилие, передающееся от рукоятичерез П 5 и заднюю С 4, раскладывается на две составляющие, направленныепо меньшему основанию трапеции к...
Навесной рабочий орган к ковшу экскаватора “прямая лопата

Номер патента: 1578282
Опубликовано: 15.07.1990
Авторы: Аренс, Ахтулов, Демин, Самойленко
Метки: ковшу, лопата, навесной, орган, прямая, рабочий, экскаватора
...грунта. Длина нижнего упора 11 выбирается большей, чем длина зубьев 5.На раме 1 также смонтированы боковые ограничители 12, которые взаимодействуют с боковыми поверхностями 40 зубьев 5.Верхняя рабочая поверхность рамы 1 выполнена в виде плоской съемной пластины 13, конструкция навесного рабочего органа рассчитывается таким 45 образом, чтобы его центр тяжести 14 находился между торцем нижнего упора 11 и режущей кромкой 2 рамы 1. Рама 1, седло 3 и верхний упор 10 вы- . полнены решетчатыми.Навесной рабочий орган работает следующим образом.Перед навешиванием на ковш экскаватора он расположен на поверхности грунта в положении, изображенном на фиг. 1, то есть, с поднятым ввверх55 седлом 3 и верхним упором 10. Это положение оЬеспечивается...
Предыдущий патент: Устройство автоматического управления роторным экскаватором
Следующий патент: Роторный траншейный экскаватор
Случайный патент: Электродинамический репродуктор