Система автоматического управления процессом бурения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1479632
Авторы: Багаутинов, Глухов, Калыгин, Кравцова





Текст
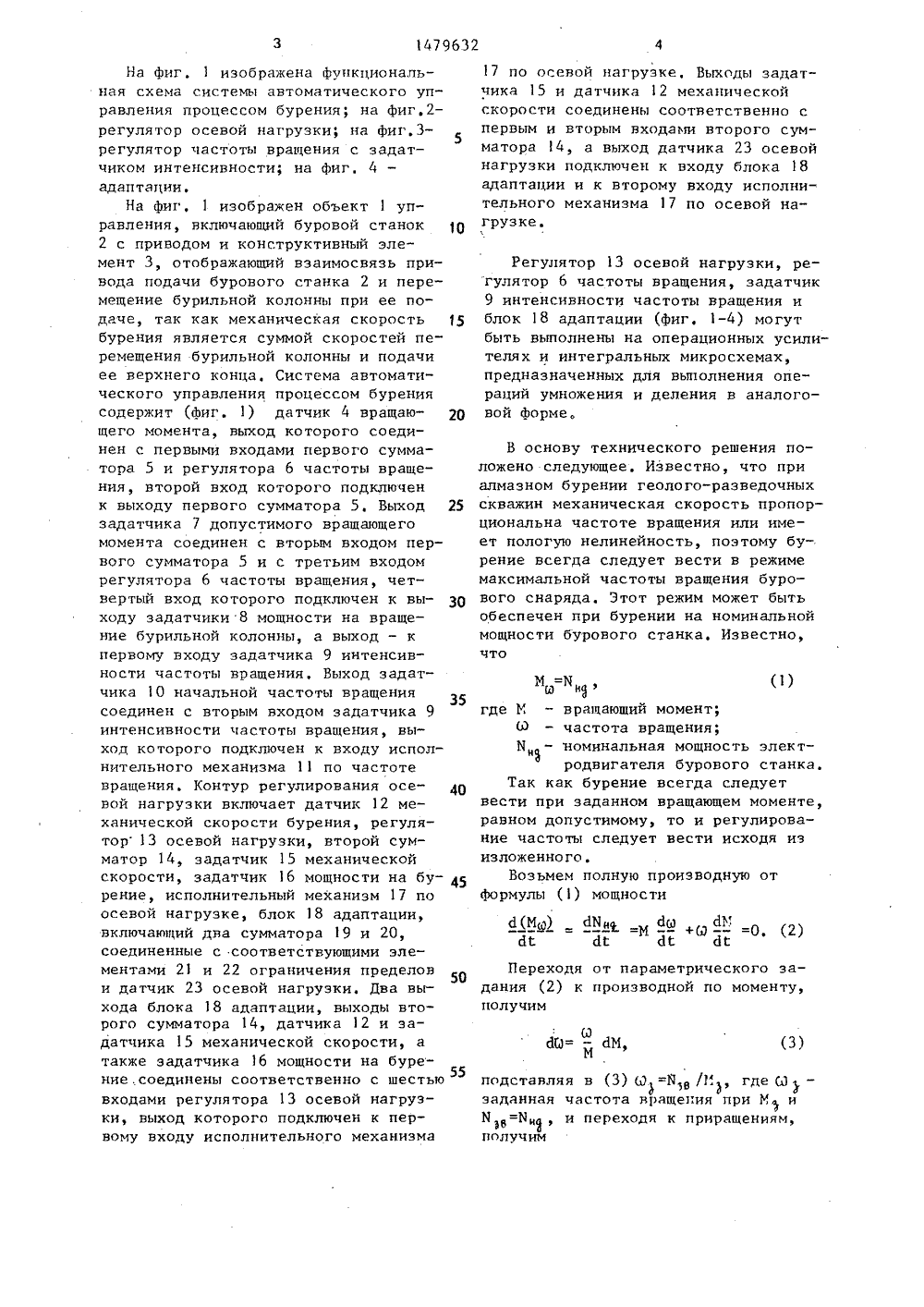
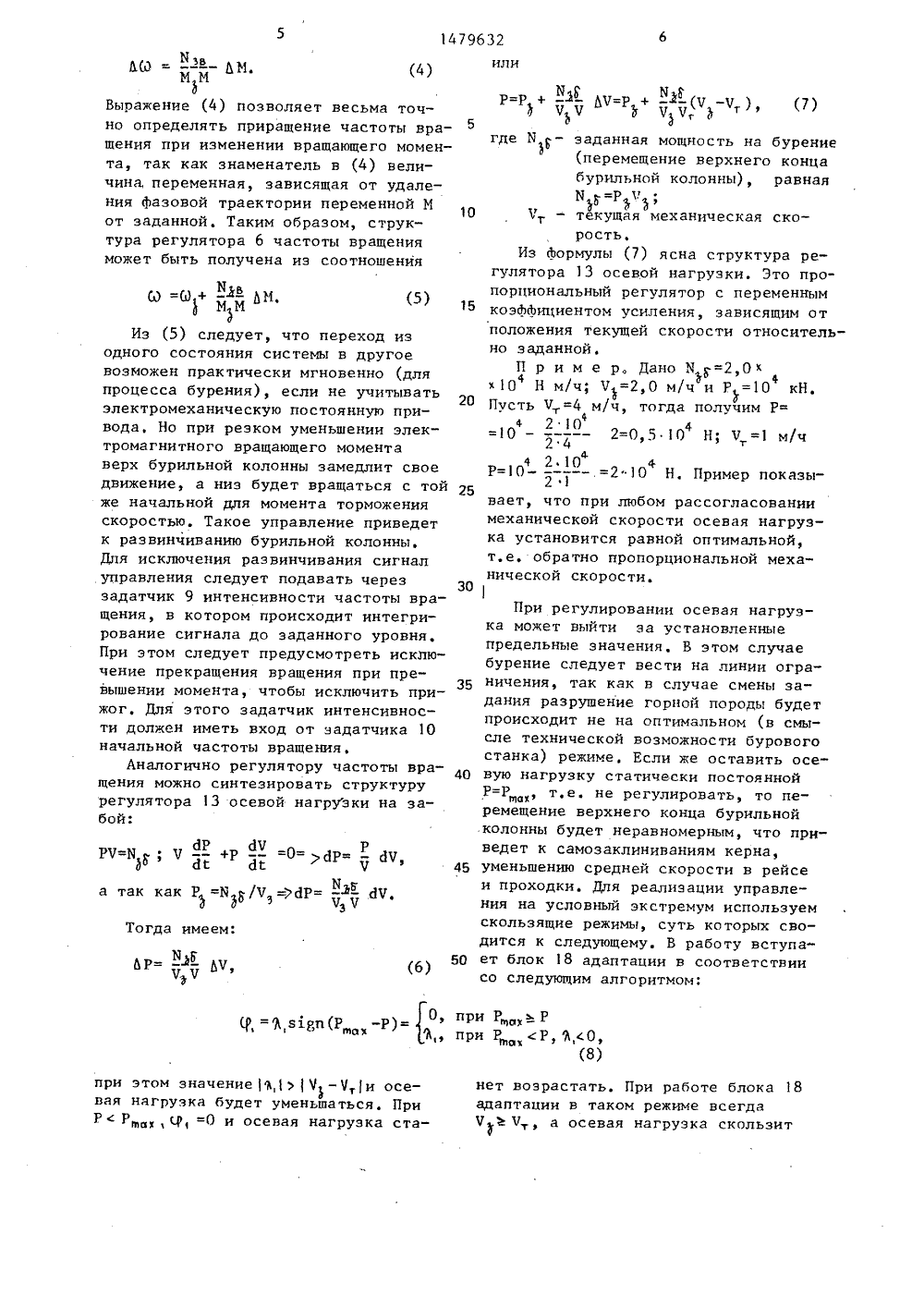
НИЕ ИЗОБРЕТЕН О вую н Целью изо шение эффект счет установ жима бурения и защиты бур чивания и пр ре тени вности ения н является повы.управления за вых значений рене горных породолонны от раскру Изобретение от управлению проц ности к система сится к контролю ения, в чассо втоматическо сме льнои жогов,ква геолого-разведочны рени н. ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР(56) Авторское свидетельство СССРМ 470592, кл. Е 21 В 45/00, 1969,Авторское свидетельство СССРВ 739219, кл. Е 21 В 45/00, 1977.(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ(57) Изобретение относится к колонковому бурению геолого-разведочныхскважин и позволяет повысить эффективность управления за счет установления новых значений режима буренияпри смене горных пород и защиты бурильной колонны от раскручивания иприжогов, Система снабжена задатчиками: 8 мощности на вращение бурильной колонны, 9 интенсивности частоты вращения, 10 начальной частотывращения и 16 мощности на бурение,регулятором частоты вращения (РЧВ)6 и регулятором осевой нагрузки (РОН)13, К входам РЧВ 6 подключены выходы датчика 4 момента, первого сумматора 5,эадатчика 7 допустимого враавления режимами колонкового,.ЯО 14796 щающего момента и задатчика 8. Сигнал на выходе РЧВ 6 характеризует заданную частоту вращения. Для предотвращения раскручивания и прижога бурильной колонны выход РЧВ 6 соединен с исполнительным механизмом 11 через задатчик 9, второй вход которого подключен к задатчику 1 О, К входам РОН 13 подключены выходы блока 18 адаптации, второго сумматора 14, датчика 12 и задатчика 15 механической скорости бурения, а также задатчика 16. Сигнал на выходе РОН 13 характеризует заданную осеа грузку и подается на первый вход исполнительного механизма 17, где, сравнивается с сигналом датчика 23 осевой нагрузки, По сигналу рассогласования осуществляется подача бурильной колонны, Блок 18 адаптации включает два сумматора 19 и 20, два задатчика граничных значений осевой нагрузки и два элемента 21 и 22 ограничения пределов, выходы которых являются выходами блока 18, Алгоритм работы блока 18 позволяет осуществлять оптимальное управленце по заданной мощности на разрушение горной породы на границах допустимых значений осевой нагрузки, 1 з.п. ф-лы, 4На фиг. 1 изображена функциональная схема системы автоматического управления процессом бурения; на фиг.2 регулятор осевой нагрузки; на фиг,3 регулятор частоты вращения с эадатчиком интенсивности; на фиг, 4адаптации,На фиг, 1 изображен объект 1 управления, включающий буровой станок2 с приводом и конструктивный элемент 3, отображающий взаимосвязь привода подачи бурового станка 2 и перемещение бурильной колонны при ее подаче, так как механическая скорость 15бурения является суммой скоростей перемещения бурильной колонны и подачиее верхнего конца, Система автоматического управления процессом бурениясодержит (Фиг. 1) датчик 4 вращаю рщего момента, выход которого соединен с первыми входами первого сумматора 5 и регулятора 6 частоты вращения, второй вход которого подключенк выходу первого сумматора 5, Выход 25задатчика 7 допустимого вращающегомомента соединен с вторым входом первого сумматора 5 и с третьим входомрегулятора 6 частоты вращения, четвертый вход которого подключен к вы Оходу задатчики 8 мощности на вращение бурильной колонны, а выход - кпервому входу эадатчика 9 интенсивности частоты вращения, Выход задатчика 10 начальной частоты вращениясоединен с вторым входом задатчика 9интенсивности частоты вращения, выход которого подключен к входу исполнительного механизма 11 по частотевращения, Контур регулирования осе Овой нагрузки включает датчик 12 механической скорости бурения, регулятор 13 осевой нагрузки, второй сумматор 14, эадатчик 15 механическойскорости, задатчик 16 мощности на бурение, исполнительный механизм 17 поосевой нагрузке, блок 18 адаптации,включающий два сумматора 19 и 20,соединенные с соответствующими элементами 21 и 22 ограничения пределови датчик 23 осевой нагрузки, Два выхода блока 18 адаптации, выходы второго сумматора 14, датчика 12 и эадатчика 15 механической скорости, атакже эадатчика 16 мощности на бурение.соединены соответственно с шестью55входами регулятора 13 осевой нагрузки, выход которого подключен к первому входу исполнительного механизма17 по осевой нагрузке, Выходы задатчика 15 и датчика 12 механическойскорости соединены соответственно спервым и вторым входами второго сумматора 14, а выход датчика 23 осевойнагрузки подключен к входу блока 18адаптации и к второму входу исполнительного механизма 17 по осевой нагрузке,Регулятор 13 осевой нагрузки, регулятор 6 частоты вращения, задатчик9 интенсивности частоты вращения иблок 18 адаптации (Фиг, 1-4) могутбыть выполнены на операционных усилителях и интегральных микросхемах,предназначенных для выполнения операций умножения и деления в аналоговой Форме,В основу технического решения положено следующее, Известно, что при алмазном бурении геолого-разведочных скважин механическая скорость пропорциональна частоте вращения или имеет пологую нелинейность, поэтому бурение всегда следует вести в режиме максимальной частоты вращения бурового снаряда. Этот режим может быть обеспечен при бурении на номинальной мощности бурового станка, Известно, что у Нгде М - вращающий момент;И - частота вращения;И - номинальная мощность электнродвигателя бурового станка.Так как бурение всегда следуетвести при заданном вращающем моменте,равном допустимому, то и регулирование частоты следует вести исходя изизложенного,Возьмем полную производную отФормулымощности Я - ь =М+Ц -=О, (2)(3. (М) дМ" ДУ ЙМ = д Д 1 11 Переходя от параметрического задания (2) к производной по моменту, получим ОЦ= - ЙМЯМ(3) а 1 вгде Сд -заданная частота вращения при М и11 =11 н, и переходя к приращениям,получим(4)М МВыражение (4) позволяет весьма точно определять приращение частоты вращения при изменении вращающего момента, так как знаменатель в (4) величина переменная, зависящая от удаления фазовой траектории переменной М от заданной, Таким образом, структура регулятора 6 частоты вращения может быть получена из соотношения У =Я+1 М,(5)Из (5) следует, что переход изодного состояния системы в другоевозможен практически мгновенно (дляпроцесса бурения), если не учитыватьэлектромеханическую постоянную привода, Но при резком уменьшении электромагнитного вращающего моментаверх бурильной колонны замедлит своедвижение, а низ будет вращаться с тойже начальной для момента торможенияскоростью. Такое управление приведетк развинчиванию бурильной колонны.Для исключения развинчивания сигналуправления следует подавать череззадатчик 9 интенсивности частоты вращения, в котором происходит интегрирование сигнала до заданного уровня,При этом следует предусмотреть исключение прекращения вращения при превышении момента, чтобы исключить прижог, Для этого задатчик интенсивности должен иметь вход от задатчика 10начальной частоты вращения.Аналогично регулятору частоты вращения можно синтезировать структурурегулятора 13 осевой нагрузки на забой: ЙР ЙЧ РРЧ=Д; Ч - +Р - =0=ДР= - ДЧРд й ч фа так как Р =И р/Ч =)ЙР= ЙЧ.Н оЭЧ при этом значение а,1)Ч - Ч 1 и осевая нагрузка будет уменьшаться, ПриР ( Рх,ср, =0 и осевая нагрузка стаР=Р + ЬЧ=Р + (Ч -Чт), (7)И И 13 Ч Ч 3 ЧЧ 15где И- заданная мощность на бурение3(перемещение верхнего концабурильной колонны), равная- Р ЧЧ - текущая механическая скорость,Из Аормулы (7) ясна структура регулятора 13 осевой нагрузки. Это пропорциональный регулятор с переменнымкоэААициентом усиления, зависящим отположения текущей скорости относительно заданной,П р и м е р, Дано Ч =2,0 хх 10 Н м/ч; Ч=2,0 м/ч и Р =10 кН,4 3 4Пусть Ч,.=4 м/ч, тогда получим Р=4 210 4=О - в в2=0 5 1 О Н Ч =1 м/ч2 4ф г4 210 4Р=10-=210 Н, Пример показы 252 1вает, что при любом рассогласованиимеханической скорости осевая нагрузка установится равной оптимальной,т.е. обратно пропорциональной механической орсти.зоПри регулировании осевая нагрузка может выйти эа установленные предельные значения. В этом случае бурение следует вести на линии ограничения, так как в случае сиены задания разрушение горной породы будет происходит не на оптимальном (в смысле технической возможности бурового станка) режиме, Если же оставить осе вую нагрузку статически постояннойР=Р , т,е. не регулировать, то перемещение верхнего конца бурильной колонны будет неравномерным, что приведет к самозаклиниваниям керна, 45 уменьшению средней скорости в рейсеи проходки, Для реализации управления на условный экстремум используем скользящие режимы, суть которых сводится к следующему. В работу вступа- БО ет блок 18 адаптации в соответствиисо следующим алгоритмом: нет возрастать. При работе блока 18адаптации в таком режиме всегдаЧ Ь Ч , а осевая нагрузка скользит1479632з.8 п(Р Р)г Рю иР ф г О по линии ее ограничения, так как при Р Р и Ч Ч осевая нагрузка начнет1 Лахтвозрастать, В том случае, когда Р Ри разность Ч -Ч уменьшается (Ч растет) например, из-за трещиноватости или бурения прослойки меньшей категории буримости, то осевая нагрузка будет уменьшаться, Даже если РР, а Ч увеличивается, то все равно Р уменьшается, Следовательно,В этом случае также значение1%Ч-Чи осевая нагрузка будетувеличиваться, так как для этого случая характерно ЧЧ, а осевая нагрузка скользит по нижней линии ееограничения.Следовательно, такое техническоерешение позволяет не только стабилизировать механическую скорость бурения в однородных породах, но и управлять оптимально по заданной мощности на разрушение горной породы приее смене и на линиях ограничения осевой нагрузки . Помимо этого обеспечивается режим вращения бурильной колонны на номинальной мощности электродвигателя бурового станка при допустимом моменте на бурильной колоннебез ее развинчивания и возможных прижогах,Система автоматического управленияпроцессом бурения работает следующимобразом,Перед началом задатчиком 8 мощности на вращение бурильной колонны устанавливается сигнал, пропорциональный номинальной мощности электродвигателя бурового станка Б . Задатчиком 10 устанавливается начальная частота вращения, а задатчиком 7 - допустимый вращающий момент на бурильной колонне, После этого задатчик 16мощности на бурение устанавливаетсясигнал, пропорциональный заданноймощности на бурение Нр. Так какЧ=О, то и осевая нагрузка равна нулю, При установке заданного значенияЧ задатчиком 15 механической скорости бурения, на выходе регулятора 13осевой нагрузки появляется сигнал,который поступает на первый входисполнительного механизма 17 по осевой нагрузке, который начинает увепри любом сочетании параметров процесса блок 18 адаптации также участвует в стабилизации механической скорости,При повышении текущей скорости бурения и снижения блок 18 адаптации работает аналогично, что и при достижении максимальной предельной линии по осевой нагрузке и в соответствии с формулой 1личивать осевую нагрузку на забой,Сигнал с выхода регулятора 13 осевойнагрузки в начальный момент достигает наибольшего значения согласно формулы (6), так как механическая ско -рость бурения равна нулю Ч =О, Увеличение осевой нагрузки будет происходить до тех пор, пока она не станетравной заданной, Одновременно с установкой осевой нагрузки появляетсяскорость подачи верха бурильной колонны Ч и скорость перемещения колонны Ч, Эти скорости суммируются вконструктивном элементе 3 и регистрируются датчиком 12 механическойскорости, с выхода которого сигналпоступает на второй вход второго сумматора 14 и четвертый вход регулятора 13 осевой нагрузки. На выходевторого сумматора 14 сигнал рассогласования Б=Ч -Ч из-за изменения осетвой нагрузки уменьшится, Уменьшается и коэффициент передачи регулятора13 осевой нагрузки, При бурении однородной породы, для которой заданыоптимальные Ч и Р, устанавливаютсяоптимальные значения Р и Ч, равныезаданным,С подачей осевой нагрузки увеличивается вращающий момент, регистрируемый датчиком 4, значения которогопоступают на первые входы первогосумматора 5 и регулятора 6 частотывращения. С выхода сумматора 5 сигнал рассогласованияМ=М -М посту Аоп тпает на второй вход регулятора 6,на выходе которого устанавливаетсясигнал, пропорциональный требуемойчастоте вращения, в соответствии сформулой (5). Последний подается напервый вход задатчика 9 интенсивности частоты вращения, в котором происходит преобразование импульсного9 14сигнала с регулятора б частоты вра -щения в плавно изменяющийся сигнал,который поступает на вход исполнительного механизма 11 по частоте вращения, Происходит плавное торможение бурильной колонны, Когда сигналрассогласования Д М станет равным нулю, изменение частоты вращения прекратится. При резких изменениях вращающего момента (срыв керна, кратковременный прихват снаряда) изменениячастоты вращения будут незначительными и плавными, что обеспечит устойчивую работу контура регулированиячастоты вращения и осевой нагрузки.Когда при бурении произойдет смена породы, то изменится скорость бурения 7 , на выходе регулятора 13осевой нагрузки появится сигнал рассогласования Б, который будет отрабатываться исполнительным механизмом17 по осевой нагрузке в соответствиис выражением (6). С изменением осевой нагрузки на второй вход исполнительного механизма 17 поступит сигнал от датчика 23 осевой нагрузки,И при равенстве нового заданного значения осевой нагрузки текущему значению отработка рассогласования прекратится.В случае, если механическая скорость бурения снизится до уровня,при котором устанавливаемая осеваянагрузка должна быть выше предельной,в работу вступает блок 18 адаптации,На выходе его первого сумматора 19появляется сигнал, который поступаетна вход первого элемента 21 ограничения предела, с выхода которого навторой вход регулятора 13 осевойнагрузки поступит сигнал (см, (8,который имеет знак,-противоположныйрассогласованию 0=7 -Ч и значениет(Я (= (3,1111. В результате чего осевая нагрузка будет уменьшаться, Когда осевая нагрузка станет равной илименьше Р , то Ц), =О и регулятор 13осевой нагрузки начнет увеличиватьосевую нагрузку, Цикл скользящего режима повторится,При снижении осевой нагрузки нижезаданного минимального значения Р,епс выхода второго сумматора 20 блока18 адаптации сигнал поступит на входвторого элемента 22 ограничения предела, на выходе которого значение(ц ( = (3,11111. Поэтому осевая нагруэканачнет увеличиваться, При РР ; осе 79632 1 О вая нагрузка вновь начнет уменьшать 55 5 10 15 20 25 30 35 40 45 50 ся.Стабилизация механической скорости происходит так, Если при отработкерассогласования У и установке новогозначения осевой нагрузки регулятором13 осевой нагрузки и исполнительныммеханизмом 17 рассогласование Б изменится, то изменится значение сигнала осевой нагрузки, Например,У О, то осевая нагрузка начнет возрастать и при равенстве устанавливаемого значения нагрузки текущий исполнительный механизм прекратит отработку рассогласования, Но, еслиизменилась Ч , например, увеличилась,тто У(О и регулятор 13 начнет уменьшать осевую нагрузку,О выборе начального оптимальногорежима, Этот режим может быть выбранзаранее, если известны свойства раэбуриваемых пород и типы породоразрушающего инструмента или найдены в ходе бурения, В этом случае оптималь ным является режим бурения, соответствующий произведению базовой осевой нагрузки и базовой механическойскорости, доставляющий минимум стоимости 1 м проходки,Система автоматического управления процессом бурения позволяет оптимально в смысле быстродействия)устанавливать новые значения режимабурения при смене горных пород, нетребует настройки статической характеристики на плоскости режима бурения и механической скорости, обеспечивает бурение на границах режима иподдерживает заданную механическуюскорость при проходке однородных пород, а также снижать колебания частоты вращения при резких колебанияхвращающего момента, обеспечивает защиту бурильной колонны от раскручивания и прижогов,Использование предлагаемой системы обеспечит повьшение проходкив рейсе, уменьшение расхода алмазови повышение механической скорости бурения, а также повышение срока службы бурильной колонны,формула изобретения 1. Система автоматического управления процессом бурения, содержащая датчик вращающего момента и задатчик допустимого вращающего момента, вы 4ходы которых соединены соответственно с первым и вторым входами первого сумматора, датчик осевой нагрузки, выход которого подключен к входу блока адаптации, датчик и задатчик механической скорости бурения, выход которого соединен с первым входом второго сумматора, а также исполнительные механизмы по частоте вращения и осевой нагрузке, о т л ич а ю щ а я с я тем, что, с целью повышения эйфективности управления эа счет установления новых значений режима бурения при смене горных пород и защиты бурильной колонны от раскручивания и прижогов, система снабжена задатчиками начальной частоты вращения, мощности на вращение бурильной колонны; мощности на бурение н интенсивности частоты вращения, а также регуляторами частоты вращения и осевой нагрузки, при этом выходы датчика вращающего момента, первого сумматора, задатчика допустимого вращающего момента и задатчика мощности на вращение бурильной колонны соединены соответственно с первым, вторым, третьим и четвертым входами регулятора частоты вращения, выход которого подключен к первому входу задатчика интенсивности частоты вращения, выход задатчика начальной частоты вращения соединен с вторым входом задатчика интенсивности частоты вращения, выход которого подключен к входу исполнительногоеханизма по частоте вращения, пер 79 б 32 12вый и второй выходы блока адаптации,а также выход второго сумматора соединены соответственно с первым, вторым и третьим входами регулятора 5осевой нагрузки, выход датчика механической скорости бурения подключенк второму входу второго сумматора ичетвертому входу регулятора осевойнагрузки, причем выходы задатчиковмеханической скорости бурения и мощности на бурение соединены соответственно с пятым и шестым. входами регулятора осевой нагрузки, выход которого подключен к первому входу исполнительного механизма по осевойнагрузке, а выход датчика осевойнагрузки соединен с вторым входом исполнительного механизма по осевой нагрузке 2, Система по.п, 1, о т л и ч аю щ а я с я тем, что блок адаптациисодержит два сумматора, два элемен та ограничения пределов и два задатчика максимальной и минимальной осевой нагрузки, при этом выходы задатчиков максимальной и минимальной осевой нагрузки соединены с первыми ЗО входами соответственно первого и второго сумматоров, выходы которых подключены к входам соответствующих элементов ограничения пределов, причемвторые входы сумматоров являются вхоЗ 5 дами блока, а выходы первого и второго элементов ограничения пределовявляются соответствующими выходамиблока адаптации.тор С,Черн актор Ю,Сере и ГКНТ СС Гагарина, 101 изводственно-издательский комбинат "Патент", г, Ужгор 254/31 Тираж 515 Государственного комитета по изобрете 113035, Москва, 3-35, Раушск Подписноем и открытиянаб., д. 4/5
СмотретьЗаявка
4316460, 14.10.1987
СВЕРДЛОВСКИЙ ГОРНЫЙ ИНСТИТУТ ИМ. В. В. ВАХРУШЕВА
КАЛЫГИН ЕВГЕНИЙ ВИКТОРОВИЧ, ГЛУХОВ ГЕОРГИЙ НИКОЛАЕВИЧ, БАГАУТИНОВ ГАБДРАУР АТРАХМАНОВИЧ, КРАВЦОВА ТАТЬЯНА НИКОЛАЕВНА
МПК / Метки
МПК: E21B 44/02, E21B 44/08
Опубликовано: 15.05.1989
Код ссылки
<a href="https://patents.su/7-1479632-sistema-avtomaticheskogo-upravleniya-processom-bureniya.html" target="_blank" rel="follow" title="База патентов СССР">Система автоматического управления процессом бурения</a>
Устройство для измерения осевой нагрузки на долото в колонне бурильных труб

Номер патента: 1502815
Опубликовано: 23.08.1989
Автор: Дверий
МПК: E21B 45/00
Метки: бурильных, долото, колонне, нагрузки, осевой, труб
...нереводника 8, а в верхней части - наупорный выступ 9 корпуса. Наружнаяповерхность средней части переводни"ка 8 выполнена в виде граней (плоскостей) (фиг. 2). Аналогичные грани10 выполнены в нижней части корпуса.Устройство работает следующим образом.При создании осевой нагрузки надолото обойма 6, переводннк 8 через рые вдавливаются в обойму 3, образуяв ней лунки, а при вращении - кольцевые канавки. Вращение долоту передается корпусом 2 устр-ва и П 8,После бурения на поверхности на обойме3 замеряют глубину лунок (канавок)и сравнивают их с аналогичными, полученными при тарировке. По результатам сравнения определяют величинуосевой нагрузки, при которой отрабатывалось долото. 2 ил. пружину 7 передают усилие на шарики 4, которые...
Устройство для измерения усилий в колонне бурильных труб в процессе бурения

Номер патента: 470587
Опубликовано: 15.05.1975
МПК: E21B 17/00, E21B 19/08, E21B 44/00
Метки: бурения, бурильных, колонне, процессе, труб, усилий
...элемента под углом 120 один относительно другого, обмотки которых соединены по схеме звезда, глубинный переключатель 3, электронную схему, состоящую из генератора частотно-мобаний 4, усилителя напрямощности 6, фильтра верхбинного блока питания 8.На поверхности устанавприемная аппаратура, сосго фильтра 9, частотногоного переключателя 11блока, состоящего из узло10 В зависимости от величупругий элемент осевыхлий, меняется зазор в инзователях 2, что вызываедуктивностп, а так как пр15 ключаются поочередно,вто в соответствии с изменяется и частота измеритсдулпрованный по частотев усилителях 5 и 6 и пере.20 зи на поверхность. В наземной приемной аппаратуре послеприсоединительного фильтра 9, служащего для разделения частоты измерительного сиг...
Снаряд для бурения скважин с транспортированием шлама по двойной колонне бурильных труб

Номер патента: 1446273
Опубликовано: 23.12.1988
Авторы: Агринский, Дрожжин, Земцов, Пешков, Яфаров
МПК: E21B 21/00, E21B 21/12
Метки: бурения, бурильных, двойной, колонне, скважин, снаряд, транспортированием, труб, шлама
...5 образуют ограничительную решетку 12.Внутренние направляющие пластины8 (фиг. 1 и 2) могут выполняться 35путем разреза одной цельной лопасти,состояще из двух лопастей 5, Т-образным пазом вдоль центральной оси6. Края разреза отгибаются в противоположные стороны в тангенциальном 40направлении, образуя накравляющие конус, Охлаждают лопасти 5 во времярасхаживания бурового инструмента,При постановке снаряда на забой полость 11 заполняется шламом, перемещаемым пластиной 8, и утечка промывочной жидкости в затрубное пространство прекращается 4 ил,2пластины с возможностью охватывания шламозаборной полости.Кроме того, каждая лопасть может изготавливаться раздельно и затем скрепляться с корпусом и между собой с помощью сварки (фиг,. 3)....
Колонна бурильных труб для высокочастотного бурения

Номер патента: 1406332
Опубликовано: 30.06.1988
Авторы: Нескоромных, Страбыкин
МПК: E21B 17/00, E21B 17/10, E21B 3/00
Метки: бурения, бурильных, высокочастотного, колонна, труб
...продолжается вокругоси скважины и вокруг центра тяжести(динамическая самоцентрация), чтоприводит к снижению вибраций и силтрения о стенки скважины. Формула изобретения Колонна бурильных труб для высокочастотного бурения, содержащая уста-. новленные в ее нижней части друг под другом удлинители, оси внутренних цилиндрических поверхностей которых расположены по одной прямой и смеще" ны относительно осей наружных цилннд- рических поверхностей, и породоразрушающий инструмент, о т л и ч а ющ а я с я тем, что, с целью умень- шенин износа и вибрации за счет динамической самоцентрации колонны при высоких частотах ее вращения, удпинители размещены относительно друг друга с совпадением осей их наружььас цилиндрических поверхностей, а...
Устройство для измерения динамической нагрузки в бурильной колонне

Номер патента: 1502801
Опубликовано: 23.08.1989
Авторы: Вацык, Домальчук, Ивасив, Литвинов, Малько, Мойсеенко, Поддубный
МПК: E21B 45/00
Метки: бурильной, динамической, колонне, нагрузки
...возникновении осевых динамических усилий в процессе бурения напоршень 3 действуют инерционныесилы, эквивалентные возникающим осевым динамическим усилиям на долотов процессе бурения. Поршень 3 пере"мещается вниз, сжимает пружину 8,35 и отверстия 20 в перегородке 19кратковременно открываются.Жидкость из полости 6 по каналу14 перетекает в полость 5, а затемчерез отверстия 20 в кольцевую ка 40 меру 18,Вследствие увеличения объема гид-,рокамеры давление в полостях 5 и 6,мгновенно падает, но эа счет жесткости пружины 9 поршень 4 переме 45 щается ввеРх, уменьшая тем самымобъем гидрокамеры и увеличивая давление в ней до первоначального значения или близкому к нему. 50 При уменьшении динамической нагрузки поршень 3 под действием упругой силы...
Предыдущий патент: Забойный датчик устройства контроля осевой нагрузки на долото
Следующий патент: Устройство для измерения градиента температуры в буровых скважинах
Случайный патент: Дорожная одежда