Система управления пресс-гранулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1194690
Авторы: Гончаренко, Плеве, Редунов, Хобин






Текст
СООЭ СОВЕТСКИХсаюлипметижРЕО 1 УБЛИК 51)4 Б 30 В 9/8 КЫЙ КОМИТЕТ СССРОБРЕТЕНИЙ И ОТНРЫТИЙ 51 Р 10 у3 " ". ц БМБ. яд -у САНИЕ ИЗОБРЕТЕНИЯ ЬСТВУ К АВТОРСКОМУ Св(71) Одесский технологический институт пищевой промьппленности им.М.В,Ломоносова(56) Жислин Я.М. Оббрудование для произ здства комбикормов и обогатительных смесей. М.:Колос, 1976- 160 с.Вилесов Н.Г., Скрипка В.Я., Ломаэов В.П., Танченко И,М. Процессы гранулирования в промьппленности.Киев: Техника, 1976, 190 с.(54)(57) 1.СИСТЕМА УПРАВЛЕНИЯ ПРЕССГРАНУЛЯТОРОМ, содержащая соединенные между собой электропривод и датчикположения механизма подачи сырья, датчик тока привода матрицы, соединенный через первый дифференциатор с регулятором температуры, соединенным с датчиком температуры и механизм мом регулирования подачи пара, оптимизатор температуры, а также регулятор тока, соединенный через второй дифференциатор с датчиком и регуля-, тором температуры, о т л и ч а ю - щ а я с я тем, что, с целью повышения надежностии производительнос-. ти пресс-гранулятора, а также снижения удельных энергозатрат путем оптимизации значений тока и температуры воздействием на подачу сырья и. пара, она снабжена эадатчиком тока, датчиком положения механизма подачи пара, двумя идентичными блоками формирования сигналов температуры и тоЯО 1194696 А ка, а также двумя идентичными блоками прогнозирования температуры и тока, при этом входы регулятора токасоединены с выходами датчика тока,первого дифференциатора, блока формирования сигналов тока и блока прогнозирования тока, а выход подключенк электроприводу механизма подачисырья, задатчик тока соединен с входом формирования сигналов тока, авход блока прогнозирования тока подключен к датчику положения механизма подачи сырья, соединенному такжес регулятором тока, при этом входырегулятора температуры соединены свыходами датчика температуры, второго дифференциатора, блока формирования сигналов температуры и блокапрогнозирования температуры, а выход подключен к механизму регулиро-,вания подачи пара, с которым связандатчик положения этого механизма,соединенный своим выходом с регулятором температуры и блоком прогнози-,рования температуры, оптимизатор темпе.ратуры соединен входами с датчикамитемпературы и положения механизмаподачи сырья, а выходом подключен квходу блока формирования сигнала температуры. 2, Система по п.1, о т л и ч а ющ а я с я тем, что каждый блок прогнозирования выполнен в виде последовательно соединенных входного сумматора, интегратора, элемента запаздывания и вйходыого сумматора, причем выход интегратора соединен также с вторыми входами обоих сумматоров, входом каждого блока прогнозирования являет 119464ся вход входного сумматора, а выходом - выход выходного сумматора. 3, Система по п.1, о т л и ч а ю - щ а я с я тем, что каждый регулятор выполнен в виде входного и выходного сумматоров и интегратора, причем входы выходного сумматора соединены с выходами интегратора соответствующего датчика положения и входного сумматора, выход выходного сумматора является выходом регулятора, а входами 90последнего являются входы входного сумматора.4. Система ио п.1, о т л н ч а ющ а я с я тем, что каждый блок формирования сигналов выполнен в виде соединенных через переключатель интегратора и сумматора, один из входов последнего является входом блока формирования, а другой соединен с выходом своего интегратора, причем выход интегратора является выходом блока формирования сигналов.Изобретение относится к машиностроению, в частности к конструкции устройств управления оборудованием, для Обработки материалов давлением.Цель изобретения - повышение надежности и производительности прессгранулятора за счет автоматизации перехода с режима холостого хода на работу с оптимальными параметрами, а также снижение удельных энергозатрат при гранулировании материала путем обеспечения контроля и оптимизации управления процессом (по току ) приводного электродвигателя и температуре материала перед гранулированием воздействием на подачу сырья и пара.Для достижения этой цели система управления пресс-гранулятором, содержащая соединенные между собой электропривод и датчик положения механизма под чи сырья, датчик тока привода матрицы, соединенный через первый диффереициатор с регулятором температуры и механизмом регулирования подачи ивра, оптимизатор температуры, а также регулятор тока, соединенный чареэ второй днфференциатор с датчиком и регулятором температуры, снабжена задатчиком тока, датчиком положения механизма подачипара, двумя идентичными блоками формирования сигналов температуры и тока, а также двумя идентичными блоками прогнозирования температуры и тока, при этом входы регулятора тока соединены с выходами датчика тока, первого ди 4 ференциатора, блока формирования аигналов тока и блока прогноэирования тока, а выход подключенк электроприводу механизма подачисырья, задатчик тока соединен с входом блока формирования сигналов то 5 ка, а вход блока прогнозирования тока подключен к датчику положения механизма подачи сырья, соединенномутакже с регулятором тока, при этомвходы регулятора температуры соеди 1 О иены с выходами датчика температуры,второго дифференциатора, блока формирования сигналов температуры и блока прогнозирования температуры, авыход подключен к механизму регули 15 рования подачи пара, с которым связан датчик положения этого механизма, соединенный своим выходом с регулятором температуры н блоком прогнозирования температуры, оптимизатор20 температуры соединен входами с датчиками температуры н положения механизма подачи сырья, а .выходом подключен к входу блока формированиясигнала температуры,25 Кроме того, каждый блок прогнозирования выполнен в виде последовательно соединенных входного сумматора, интегратора, элемента запаздывания и выходного сумматора, приЗО чем выход интегратора соединен также со вторыми входами обоих сумматоров, входом каждого блока прогнозирования является вход входногосумматора, а выходом - выход выходного сумматора, каждый регуляторвыполнен в виде входного и выходного сумматоров и интегратора, причем входы выходного сумматора соединены с выходами интегратора соответствующего датчика положения и выходного сумматора, выход выходного сумматора является выходом регулятора, а входами последнего являются входы входного сумматора.Каждый блок формирования сигналов выполнен в виде соединенных через переключатель интегратора и сумматора, один из входов которого является входом блока Формирования, а дру-Огой соединенс выходомсвоего интегратора, причем выходинтегратора является выходом блокаформирования сигналов.На чертеже приведена блок-схема системы. 5Система содержит установленные на питателе пресса-гранулятора механизм1 регулирования подачи сырья с датчиком 2 положения этого механизма, установленные на паропроводе пресса 20 механизма 3 регулирования подачи пара с датчиком 4 его положения, чувствительный элемент датчика 5 тока вклю чен в цепь питания электродвигателя привода матрицы, а чувствительный 25 элемент датчика 6 температуры вмонтирован в пресс на выходе смесителя, кроме того система содержит регулятор 7 тока, включающий в себя входной и выходной сумматоры и интегратор, ре гулятор 8 температуры, также включающий в себя входной и выходной сумматоры и интегратор, задатчик 9 тока оптимизатор 10 температуры, дифференциаторы 11 и 12 межрегуляторных связей 11, 12, первый и второй пе. реключатели 13 и 14, блок 15 прогнозирования температуры, состоящий из сумматора 16, интегратора 17, звена 18 запаздывания и выходного сум Оматора 19,блок 20 прогнозирования тока,состоящий из сумматора 21, интегратора22,звена 23 запаздывания. ивыходногосумматора 24,блок 25 формирования сигнала температуры в виде сумматора д 526, переключателя 27 и интегратора28, блок 29 формирования сигнала тока, содержащий интегратор 30, переключатель 31 и сумматор 32, Системасодержит также третий переключатель 5033, Режимы работы пресса-гранулятора обуславливают режим работы автоматической системы управления.Параметрами, характеризующими режим работы пресса-гранулятора, являются ток 1 статора приводного элект- .родвигателя (ПЭД ) и соотношение подачи пара к подаче рассыпного сырья Я/С) или функционально связанная с этим соотношением температура 9 пропаренного материала, а также удельные энергозатраты на прессование 1/С,Снижение рабочего тока 1 относительно номинального 1 , т,е. недогрузка привода, приводит не только к снижению производительности прес" са, но также и к снижению коэффициен та мощности сети (соз 9), что при высокой установленной мощности приводов пресса 1, до 60 кВт ) вызывает до-. полнительные энергозатраты. Увеличе-. ние рабочего тока 1 относительно номинального 1", т.е, перегрузка приводит к его перегреву, возникает аварийная ситуация другого рода, которая может привести к выходу двигателя из строя. Для предотвращения этого аварийная защита (тепловая или токовая),отключая двигатель, прекращает технологический процесс,.Оптимальный режим работы пресса, 1 т.е. режим максимальной производительности и минимальных удельных энергозатрат 7 наблюдается в непосредственной близости значений режимных параметров Е и 6 к их граничным значениям Тг и 9, выход за которые приводит к возникновению аварийных ситуаций.Описанные условия оптимальности работы пресса справедливы как для стационарного режима, когда значенияи 6 в среднем постоянны, так и для переходного режима, имеющего место, например, при выводе пресса с холостого хода на рабочую нагрузку. Существенно то, что в переходном режиме задача обеспечения оптимальности и надежности ( безаварийности ) работы пресса усложняется, так как в этом случае подача пара Я и сырья С меняется в значительных пределах, что увеличивает вероятность возникновения их соотношений, приводящих к двум типам аварийных ситуаций, описанных выше.Снижение производительности пресса при эксплуатации его в неоптималь; ных режимах и в результате аварийных остановов нарушает ритмичность работы всей технологической линии гранулирования. А ликвидация последствий аварийных остановов требует больших затрат ручного труда на очистку смесителя и зоны прессования, а зачастую и на ремонт и регуна выходе входного сумматора регулятора поддерживается равным нулю, а выходной сигнал интегратора 28 отслеживает сумму значений сигналов с выходов датчика 6 температуры, блока 15 прогнозирования и второго дифференциатора 12, так как предпусковой режим является стационарным, последние два сигнала равны нулю и интегратор 28 отслеживает значение температуры пропаренного сы 1.ья, поступающее с датчика 6. Другой контур ООС охватывает выходной сумматор регулятора температуры через интегратор этого регулятора и переключатель 13. При этом на выходе регулятора температуры сигнал поддерживается равным нулю, а интегратор отслеживает значение сигнала поступающее с датчика 4 положения.Благодаря действию ООС через переключатель 33 на выходе оптимизатора 1 О также поддерживается сигнал, равный текущему значению температуры в смесителе, поступающему от датчика 6, Такие же функции выполняют контуры ООС в регуляторе тока 7, при этом интегратор регулятора токаповто-, ряет значение сигнала с датчика 2 положения, а интегратор 30 блока 29 формирования сигналов отслеживает текущее значение тока, поступающее с датчика 5. Таким образом, при включении системы управления, когда выходы переключателей 13, 14, 27, 31, 33 соединяются со своими вторыми входами, начальные условия динамических элементов в системе управления оказываются согласованными, что позволяет избежать переходных процессов с большими динамическими отклонениями, вызывающих аварийные ситуации. При включении системы управления, т.е, при установке переключателей 13, 14, 27, 31, 33 в показанное на чертеже состояние, система переходит в пусковой режим работы, характеризуемый движением регулируемых параметров 1 и С 1 от их начальных значений к установленным 1 й Вф". В этом режиме регуляторы температуры 8 и тока 7 имеют П + И структуру, а блоки 25 и 29 формирования сигналов представляют собой апериодические звенья первого порядка. Эти звенья образуются охватом интегратора 28 ООС через сумматор 26 и переключатель 27, а интегратора 30 в . ООС через 35 Ф 11 946904лировку пресса перед повторным запуском его в работу.,Динамические свойства каналов регулирования парметров тока и температуры пресса-граиулятора также обладают определенными особенностями,главная из которых состоит в наличии запаздывания в управлении, т.е.изменение подачи сырья С или пара1,"1 приводит к изменению режимных параметров 1 и О не сразу, а спустяопределенное .время запаздывания. Запаздывание в управлении определяется,в основном, временем транспортирования сырья в смесителе и скоростьюпрогрева рассыпного материала паром.Цельуправления процессом гранулирования - обеспечение максимальной производительности при минимальньйс удельных энергозатратах и высокой надежности работы пресса.В связи с этим задача управлениязаключается в поддержании как в стационарных, так и в переходных режи- .мах оптимального соотношения Я/9или, что более удобно, температуры9 " и в стабилизации тока нагрузкина номинальном уровне, При этом услоЪвием надежной работы пресса является невы.;од режимных параметров 1 и9 за их граничные зна:ения 1 и 9Система управления обеспечиваетработу пресс-гранулятором в следующих режимах.Если пресс работает на холостомходу или управляется оператором, тосистема управления находится в предпусковом режиме. При выводе прессагранулятора с холостого хода на рабочую нагрузку система управления 4 цработает в пусковом режиме, По окончании пускового режима система переходит в режим стабилизации оптимальной заданной нагрузки. Рассмотримработу системы в каждом режиме отдельно.Предпусковой режим имеет место,если не запущен привод питания пресса или пресс управляется оператором.При этом выходы переключателей 13, 5014, 27, 31, 33 соединены с их первыми входами, противоположно состоянию,показанному на чертеже. Замыкаютсявнутренние отрицательные обратные связи ООС ) в системе управления, а 55именно входной сумматор регуляторатемпературы охватывается ООС черезинтегратор 28, благодаря чему сигнал% (Р)=й (Р)- (Ргде К, Т щ ",- коэффициент переда чи, постоянная времени и время запаздывания модели объекта по соответствующему каналу регулирования.Модель инерционности канала регулирования В образована интегра тором 17, охваченным ООС через сумматор 6, модель запаздывания канала регулирования 6 образуется звеном 18 запаздывания, Модель инерционности канала регулирования 1 обра зована интегратором 22, охваченным ООС через сумматор 21, а модель запаздывания - звеном 23 запаздывания,7 11946сумматор 32 и переключатель 31, Пе-реключатель 33 размыкает цепь ООС,охватывающую оптимизатор в предпусковом режиме, и выходной сигналоптимизатора начинает движение к 5вычисляемому оптимальному значениютемпературы. В пусковом режиме необходимо исключить возможность возникновения опасного соотношения О/С,приводящего к переувлажнению сырья Ои аварийной ситуации заклиниванияпрессущующего узла. Это достигаетсяограничением скорости изменения регулируемых параметров 1 и О, формированием определенных алгоритмов 5их изменения и минимизацией дисперсии колебаний регулируемых параметров 1 и. 8,После включения системы управленияна второйвход блока 25 формирования сигнала подается оптимальное заданное значение температурыс выхода оптимизатора 10, а на второй вход блока 29 - заданное значение тока от задатчика 9.Снижение колебаний регулируемыхпараметров 1 и 8 обеспечивается применением блоков прогнозирования.Структура блоков прогнозирования включает в себя модель инерционности соответствующего канала регулирования с передаточной функциейи модель запаз. дывания в том же канале регулирова- ; З 5ния с передаточной функцией И 5 (Р) йртыПолная передаточная функция каждого блока прогнозирования равна .40де 1 к(Р) передаточная функция разомкнутого контура регулирования;передаточная функция регулятора;передаточная функция инерционности канала регулирования;передаточная функция модели инерционности в блоке Ур(Р) 1 и Р) У(Р) прогнозирования;л фзапаздывание в контуре регулирования;гмт - запаздывание в модели вблоке прогнозирования;Р - оператор Лапласа.Благодаря компенсации запаздывания в контурах регулированиян 6 при управлении прессом уменьшается колебательность регулируемых параметров Е и В и их динамические отклонения в переходных режимах, Пар 9 О 8В системе управления блоки прогнозирования, а значит и модели соответствующих каналов регулирования, оказываются включенными параллельно соответствующим моделируемым каналам.регулирования пресса-гранулятора, При изменении, в процессе регулирования, положений механизмов регулирования подачи сырья или пара управляющее воздействие проходит через объект управления, проявляясь в изменении соответствующих регулируемых параметров 1 или 8 . Это же управляющее воздействие вводится и на блоки прогнозирования соответствующих датчиков положения механизмов регулирования подачи сырья и пара. Реакции на выходах реального канала регулирования и его модели суммируются на входном сумматоре соответствующих регуляторов. При М(Р) И(Р) и ь -эта суммарная реакция на из менение управляющего воздействия оказывается тождественной реакции соответствующего канала регулирования, но сдвинутой относительно нее на время запаздывания вперед, т.е. приме-. нение блоков прогнозирования позволяет исключить (компенсировать) за-. паздывание в управлении в соответствии с выражением.9 1194690 О метры 1 и 6 в,пусковом режиме дос- Уменьшение отклонений (колебательтаточно точно отслеживают их задан- ности ) 8 относительно Оф" позволя; ные значения 1 и 6 , что поз- ет увеличить время работы пресса взэволяет исключить возможность возник- оптимальном режиме прессования и новения аварийных ситуаций в этомуменьшить вероятность возникновережиме. ния аварийной ситуации, связанной сПосле того, как заканчиваются пе- эамаэыванием прессующего узла. А реходные процессы в блоках 25 и 29 уменьшение колебательности 1 отноформирования, т,е. когда В ста- сительно 1 позволяет увеличитьфут новится равной Оф" а 1 фф 1 ф",. сис рабочий ток приводного электродвитема управления переходит в режимгателя.до номинального (за счет стабилизации оптимальных заданных увеличения подачи сырья на гранулизначений 9 ф" и 1 . В этом режимерд оатрование ), без увеличения вероятности колебательность 1 и 0 обусловлена перегрузки двигателя и срабатывания главным образом воздействием на сис аварийной защиты. Спедовательно, тему управления внешних возмущений предлагаемая система, сущестиз-за неоднородности физико-механи- венно снижая дисперсии колебаний ческих свойств различных рецептов . 1 и д, позволяет вести процесс грасырья, температуры и давления подво- иулирования более эффективно по сравдимого пара, непостоянства напряже-. 20 нению с известным устройством Я ,ния сети, изменения состояния рабо- т.е. повысить производительность С чих органов пресса в процессе ра- пресса-гранулятора и снизить удельные боты.энергозатраты на прессование, при одВ режиме стабилизаии, так же как новременном снижении вероятности вози в пусковом режиме, применение бпо никновения аварийных ситуаций, свяков прогнозирования позволяет улуч- занных с выходом 1 и 8 за их гранич- шить качество стабилизации регули- ные значения 1и дф. Последнее лик" руемых параметров 1 и д на уровне их видирует простои оборудования и сник 6 , т.е.жает затраты ручного труда по обслуэффективно компенсировать влияние 30 живанию пресса. внешних возмущений за счет своевременного адекватного изменения ре- Этим обуславливается эффективность акции регуляторов на их изменения использования системы управления 1 и 9. пресс-гранулятором.1194690 оставитель В Стейеаев ед С.Мигунова Керуак ор А.Далин т 6 илиал ЙЯП г. Уйгоред, уи.ЩФеектна т аз 7364/20 Тираж ВНИИПИ Государственн по делам изобрете 113035, Москва, Ж
СмотретьЗаявка
3715778, 28.03.1984
ОДЕССКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ ПИЩЕВОЙ ПРОМЫШЛЕННОСТИ ИМ. М. В. ЛОМОНОСОВА
ХОБИН ВИКТОР АНДРЕЕВИЧ, ГОНЧАРЕНКО АЛЕКСАНДР ЕВГЕНЬЕВИЧ, ПЛЕВЕ АЛЕКСАНДР ГЕОРГИЕВИЧ, РЕДУНОВ ГЕННАДИЙ МИХАЙЛОВИЧ
МПК / Метки
МПК: B30B 9/18
Метки: пресс-гранулятором
Опубликовано: 30.11.1985
Код ссылки
<a href="https://patents.su/7-1194690-sistema-upravleniya-press-granulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления пресс-гранулятором</a>
Пресс для формирования тюков

Номер патента: 698576
Опубликовано: 25.11.1979
Автор: Сироткин
МПК: A01F 15/04
Метки: пресс, тюков, формирования
...тюков, снабжен релаксационной камерой с узлом подачи внее связывающих веществ, которыйразмещен в начале релаксационнойкамеры и выполнен в виде расположенных по периметру последней продольных щелей, охваченных кожухом.На Фиг.1 изображен предлагаеьийпресс, вид сбоку; на Фиг.2 - то же,вид в плане,Пресс содержит бункер 1 с подцрессовщиком 2, механизм прессования 3 и механизм 4 выталкивания тюков, к которому присоединена релаксационная камера 5, В начале последней размещен узел 6 подачи связываюших веществ, выполненный н видерасположенных по периферии Релаксадионной камеры 5 продольных щелей 7,охваченных кожухом 8.В бункер 1 загружается прессуемыйматериал, который в нем уплотняетсяподпрессонщиком 2, отрезается ножом инаправляется в...
Устройство для съема кирпича сырца с пресса и формирования столбиковой садки

Номер патента: 701811
Опубликовано: 05.12.1979
Авторы: Выродов, Кабашный, Селезнев, Сидоренко
МПК: B28B 13/00
Метки: кирпича, пресса, садки, столбиковой, съема, сырца, формирования
...этом захваты 26, снабженные гидроцилиндрами зажима 32 и пружинами 33,эксцентрично закреплены к штангам 27 механизма разворота захватов.Привод всех механизмов осуществляется от автономной маслостанции 34,Устройство работает следующим образом. Кирпичи зажимаются захватами 26 с помощью пружин 33, передающих усилие на рычаги захвата.При подъеме штока гидроцилиндра 25, ролики 30, обкатываясь по пазам 28 штанг 7, разворачивают последние на 90; захваты 26 при этом разворачиваются навстречу друг другу и сближаются вследствие их эксцентричного закрепления на концах штанг 27. Таким образом, при съеме кирпичей со стола пресса захваты при подъеме разворачивают и сближают их на заданный шаг, после чего с помощью гидроцилиндра 27, переносят и...
Пресс для формирования тюков

Номер патента: 880337
Опубликовано: 15.11.1981
Автор: Сироткин
МПК: A01F 15/04
Метки: пресс, тюков, формирования
...в кожухе нагревательным элементом. На фиг 1 изображен пресс для формирова.ния тюков, вид сбоку; на фиг, 2 - то же,вид в плане. Пресс содержит бункер 1 с подпрессовщиком 2, механизм 3 прессования и механизм 4 выталкивания тюков, к которому присоединены релаксационные камеры 5. В начале последних размещен узел 6 подачи связующих веществ, выполненный в виде расположенных по пери. ферии релаксационной камеры 5 продольных щелей 7, охваченных открытым кожухом 8, в днище которого установлены нагревателыплс элементы 9. При этом кожух 8 связан посред. ством шланга 10 с емкостью для связующего вещества 11. Устройство работает следующим .образом.В бункер 1 загружается прессуемый матери. ал, который в нем уплотняется подпрессовщиком 2, отрезается...
Устройство для формирования и передачи дискретных сигналов
Номер патента: 1277420
Опубликовано: 15.12.1986
Авторы: Вергелис, Пупедис, Тихонов
МПК: H04L 25/40
Метки: дискретных, передачи, сигналов, формирования
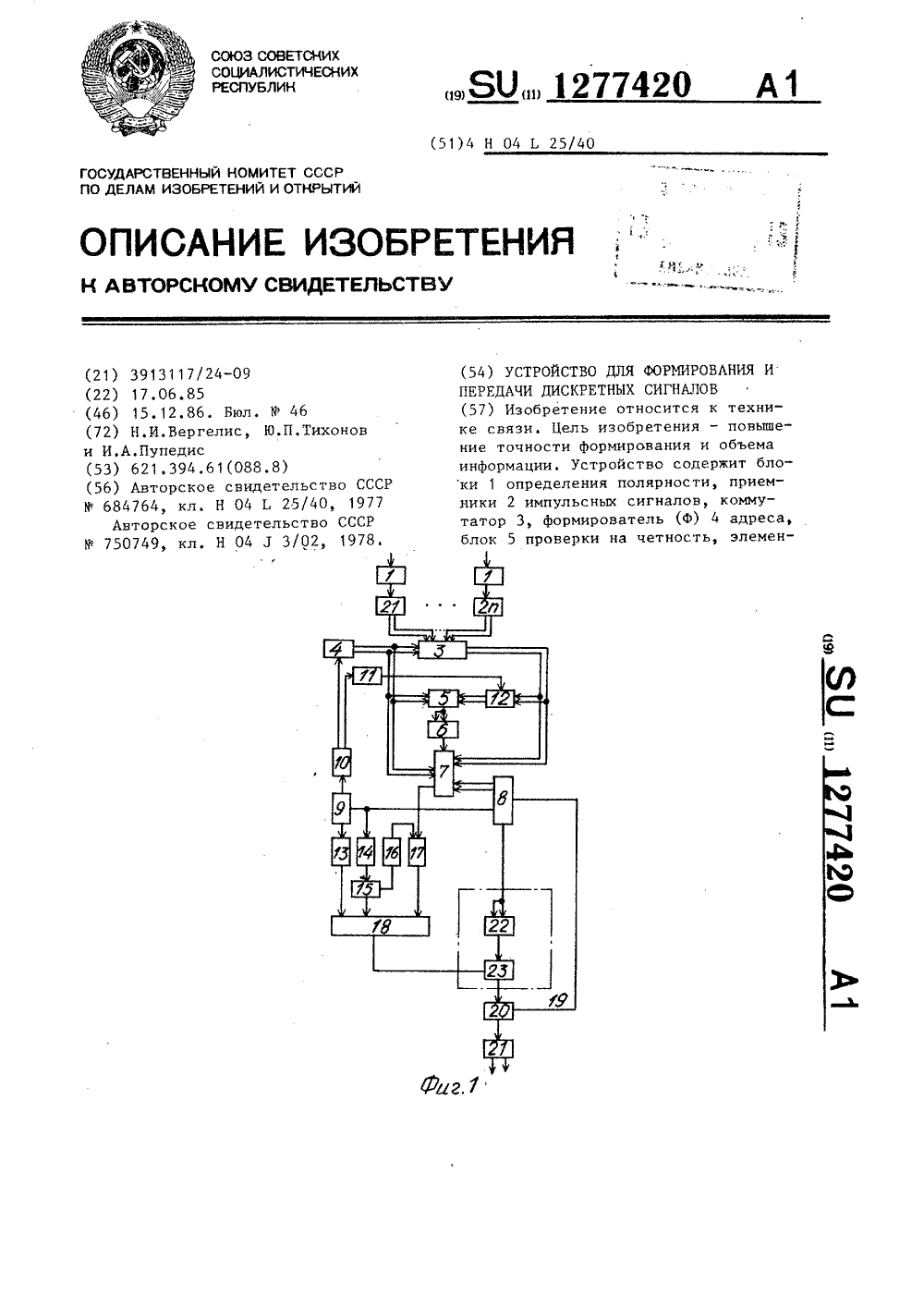
...н каждом из четырех приемников).6-9 разряды - информация о состоянии одного канала, закодированная вниде6 7 8 9 0 0 1 1 1 1 , - незадействие, 0 1 О 1 - норма канала, 1 0 0 1 - авария канала;10 разряд -четность передаваемой информации: логическая "1" - информация четная, логический "0" - нечетная, 11 и 12 разряды - стоповые импульсы (всегда логическая "1"), т.е. каждый блок данных о состоянии канала содержит импульсную последовательность двоичных элементов, например, такого вида: 000100101111, которая означает, что первый канал третьего приемника находится в норме. Образованный таким образом двенадцатиразрядный блок данных в параллельном коде записывается в ре" гистр 7 сдвига и под воздействием тактовых импульсов, поступающих от блока 8...
Пресс для формирования паковок лубяного сырья

Номер патента: 1144652
Опубликовано: 15.03.1985
Авторы: Алимходжаев, Валишин, Файзуллаев, Щекотов
МПК: A01F 15/00
Метки: лубяного, паковок, пресс, сырья, формирования
...производительности и качества прессования.Указанная цель достигается тем, что транспортирующий орган имеет бесконечный тяговый элемент с верхней прямолинейной рабочей ветвью, а клещевые захваты закреплены на тяговом элементе по краЙней мере в два ряда, причем пресс снабжен решеткой, установленной между клещевыми захватами над рабочей ветвью тягового элемента с наклоном в направлении, противоположном направлению перемещения прессуемого сырья, и подпружиненный в направлении к верхним концам захватов.Кроме того, каждый захват имеет вогнутые рабочие поверхности и на рабочей ветви тягового элемента сопряжен с соседними захватами одноименного ряда.В начале рабочей ветви тягового элемента расстояние между решеткой и верхним40 45 5055 5 15...
Предыдущий патент: Пресс для отжима жидкости, преимущественно из растительных материалов
Следующий патент: Способ обработки и сборки базовых деталей вертикального пресса
Случайный патент: Устройство для исследования деформа-ций грунта