Автомат для двусторонней высадки
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки







Текст
0% (11)ссюэ сОВетснихсоцидлистическихРЕСПЬБЛИН ЬДАРСтВЕННЫйДЕЛАМ ИЗОБРЕТЕН СССРРЫПЪ 9ВйглИОИКЛ ОПИСА 30 ЕНИЯ ВТОРСКОМЪГ СВИДЕТЕЛЬСТ(7 1) Московские отделы Специального конструкторско-технологического бюро по изоляторам и арматуреТреста "Электросетьизоляция"(54)(57) АВТОМАТ ДЛЯ ДВУСТОРОННЕЙВЫСАДКИ детапей стержневого типа,содержащий смонтированные на станине распределительный вал, высадочнпуансоны, один иэ которых связанс ползуном, блок высадки с подвижными матрицами, приводной штангоймеханизмами зажима и переноса, атакже механизмы подачи и привода,о т л и ч а ю щ и й с я тем, что,с целью повышения качества высадкии расширения номенклатуры изготавливаемых деталей, автомат снабжензакрепленными на станине параллельно ходу ползуна направляющими, связанным с вторым пуансоном двуплеР В 21 Л 5/08 В 21 К 1/ чим рычагом, другой конец которого подпружинен относительно станины, и механизмом блокировки, выполненным в виде подпружиненного фиксатора и установленного в блоке высадки копира, поочередно взаимодействующего с верхней частью привод. ной штанги и с механизмами зажима и переноса, при этом блок высадки установлен с возможностью возвратно- поступательного перемещения в направляющих, ориентирован приводной штангой вниз, подпружинен относительно станины в сторону ползуна и снабжен клиновыми вставками, взаимодействующими с подвижными матрица-ми, механизм зажима выполнен в виде соединенного с нижней частью приводной штанги рычажно-кулисного меха- ее низма, на кулисе которого закреплены со стороны блока высадки упор, р а с противоположной стороны - подпружиненная полэушка, механизм подачи выпопнен в виде пантографа верхнего и нижнего захватов и системы рычагов, соединенных через распределительный вал с механизмом привода, а второй пуансон смонтирован на станине с воэможностью осевого переме,щения.945 1107Изобретение относится к кузнечно- .прессовому оборудованию, в частности к устройствам для изготовле"ния изделий с двумя головками наконцах стержня, например стержнейизоляторов,Известен автомат для двусторонней высадки деталей стержневого типа, содержащий смонтированные на станине распределительный вал, высадочные пуансоны, один из которых связан с ползуном, блок высадки с подвижными матрицами, приводной штангой и механизмами зажима и переноса,а также механизмы подачи и привода 11.Однако известный автомат не обеспечивает изготовление широкой номенклатуры изделий с равнообъемными головками из штучных заготовок не- щкалиброванного металла,Кроме того, высадка таких изделий требует синхронизации хода ползунов, что ограничено сложностьюрегулировок, а в некоторых случаях 25необходимостью изменения кинематики автомата. При этом неодновременность срабатывания пуансонов приводит к излишнему образованию облояна одной из головок и недоштамповке - на другой, что снижает качество высадки.11 Цель изобретения - повышение качества высадки и расширение номенклатуры изготавливаемых деталей. 35Указанная цель достигается за счет того, что автомат снабжен закрепленными на станине параллельно ходу ползуна направляющими, связанным с вторым пуансоном двуплечим рычагом, другой конец которого подпружинен относительно станины, и механизмом блокировки, выполненным в виде подпружиненного фиксатора и установленного в блоке высадки 45 копира, поочередно взаимодействующего с верхней частью приводной штанги и с механизмами зажима и переноса, при этом блок высадки установлен с возможностью возвратно-посту пательного перемещения в направляющих, ориентирован приводной штангой вниз, подпружинен относительно станины в сторону ползуна и снабжен клиновыми вставками, взаимодействую щими с подвижными матрицами, механизм: зажима выполнен в виде соединенного с нижней частью приводной штанги рычажно-кулисного механизма,на кулисе которого закреплены состороны блока высадки упор, а с противоположной стороны - подпружиненная ползушка, механизм подачи выполнен в виде пантографа верхнего инижнего захватов и системы рычагов,соединенных через распределительныйвал с механизмом привода, а второйпуансон смонтирован на станине свозможностью осевого перемещения. На фиг. 1 представлен предлагаемый автомат, продольный разрез, на фиг. 2 - разрез А-А на фиг. 1 на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - узел 1 на фиг, 1.Автомат содержит станину 1, на которой смонтированы все узлы и механизмы автомата, а именно: высадочные пуансоны 2 и 3, один из которых, в частности пуансон 3, связан с ползуном 4, блок высадки 5 с подвижными матрицами 6, приводной штангой 7 и механизмами зажима 8 и переноса 9, связанными с ползуном 4, а также механизмы подачи 10 и привода 11. Механизм привода полностью не представлен ввиду его шиРокой известности, а показан толь" ко коленчатый вал с зубчатым колесом.На станине 1 закреплены направляющие 12, на которых с использованием пружины 13 смонтирован корпус блока высадки 14, внутри которого расположен механизм блокировки 15, выполненный в виде подпружиненного фиксатора 16 и копира 17. Фиксатор взаимодействует с проточкой 18 штанги 7. Нижняя часть штанги соединена через серьгу 19 с механизмом зажима, выполненным в виде рычажнокулисного механизма, кулиса 20 которого содержит регулируемый упор 21, а ползун 22 взаимодействует с пру-жиной 23, величина рабочего хода которой определяется положением упора 21. Верхняя часть штанги смонтирована с зазором 24 относительно траверсы 25, на которой установлены захваты 26 механизма переноса и клиновые ползуны 27 механизма зажима, С ползунами 27 матриц 6 контактируют клиновые вставки 28, скошенные поверхности которых обращены в сторону приводной штанги.45 50 55 На выступающей части 29 станины1 соосно пуансону 3 и блоку высадки 5 подвижно смонтирован пуансон2, который через двуплечий рычаг 30связан с пружиной 31.В зоне загрузки автомата расположен механизм подачи 10, выполненныйв виде пантографа 32, верхнего 33 инижнего 34 захватов и системы рычагов 35, соединенных через распределительный вал 36 с механизмом привода 11.К захватам 33 и 34 примыкает приводной рольганг 37, в конечной секции которого рядом с нижним захватом, расположенным между роликами,установлен упор 38 и устройство39 для контроля параметров заготовок. Нижний захват взаимодействует с верхним, который в свою очередь взаимодействует с захватами26 механизма переноса.Внутри блока высадки нижней осиустановлены опоры 40 для заготовки41. Высаженные изделия обозначеныпозицией 42,хАвтомат работает следующим образом.Заготовки 41 подают по приводному рольгангу 37 до упора 38 в зону действия механизма подачи 10. Нижний захват 34, перемещаясь вверх от распределительного вала 36, проходит между роликами рольганга, поднимает заготовку, пронося ее через устройство 39 для контроля, и передает в верхние захваты 33. Заготовки, не удовлетворяющие требованиям высадки, например по отклонениям длины, качеству нагрева и пр., сбрасываются в сторону. Верхние захваты 3 3, удерживая заготовку подпружиненными губками, перемещаются с помощью пантографа 32, системы рычагов 35 и распределительного вала 3 к механизму переноса 9, блока высадки 5, который к этому времени вернулся в исходное положение под действием пружин 13.Под действием механизма зажима 8 штанга 7 опускается вниз, причем перед разжимом матриц 6 срабатывают захваты 26 механизма переноса 9, который и перехватывает заготовку.Срабатывание захватов 26 происходит за счет ликвидации зазора 24. При этом рычаги захватов, установО 15 20 25 30 35 40 ленные на траверсе 25, поворачиваются, и захваты 26 сходятся,Для предотвращения самопроизволь.ного раэжима захватов, который может произойти в результате свободного падения на величину зазора 24перемещаемых масс, предусмотрен механизм блокировки 15, фиксатор 16которого западает в проточкуштанги7, обеспечивая совместное действиемеханизмов зажима и переноса.Последующим перемещением матрицвниз заготовка 41 переносится наоцоры 40, отштампованное изделие42, до этого находившееся в .матрицах, выгружается, а фиксатор 16 вконце хода взаимодействует с копиром 17 и расцепляет траверсу 25 соштангой 7.При движении штанги 7 вверх сначала благодаря наличию зазора 24 рас-.ходятся захваты 26, а затем начинается перемещение матриц. По мереперемещения вверх матрицы сходятся,захватывают уложенную на опоры 40 заготовку 41 и доставляют ее в зонувысадки, где ползуны 27, заклиниваясь относительно вставок 28, зажимают матрицу 6 с находящейся вее рабочем канале заготовкой посред.ством механизма зажима 8.Движение матриц 6 происходитпри холостом ходе ползуна 4, когдакулиса 20 совместно с ползуном 22и пружиной 23 работают, как жесткий элемент. В верхнем положенииматриц, когда закончилось ихсмыкание, пружина 23 начинает сжиматься, дифференцированно увеличиваяусилие зажима матриц.Это сжатие продолжается в течение всего периода высадки и достигает максимума при его окончании.Способность механизма зажима рабо. тать как жесткий элемент использована для смены изношенных матриц.При этом клиновые вставки 28 извлекают из корпуса 14 блока высадки, после чего матрицы вместе с механизмом переноса могут быть выведены в верхнюю свободную зону.После окончания операции по передаче и зажиму заготовки происходит процесс высадки, который условно можно представить двумя этапами.Сначала оформляется головка стержня со стороны ползуна, затем высадочный пуансон 3 вместе с подпру 3107945жиненным блоком высадки смещаетсяотносительно направляющих 12 в сторону второго пуансона 2 (опорного)на величину осадки заготовки, высаживая другую головку. Практически этот процесс происходит параллельно.4 Высадочный пуансон 2, подпружиненный относительно станины 1, настраивается на оптимальные усилия высадки. При возрастании этого усилия пуансон может незначительно смещаться в осевом направлении, предупреждая резкое вытекание металла в облой.1107945 Фиг. Ф СоставиТехред енко одпис Пате г. Уж ул. Проектн илиал Редактор М. Келеме Заказ 5814/10 Тираж ВНИИПИ Государственного по делам изобретений 113035, Москва, Ж, Раувь Т. ГорбуноваАч Корректор 41 Помитета СССРи открытийкая наб., д. 4/
СмотретьЗаявка
2804028, 30.07.1979
МОСКОВСКИЕ ОТДЕЛЫ СПЕЦИАЛЬНОГО КОНСТРУКТОРСКО ТЕХНОЛОГИЧЕСКОГО БЮРО ПО ИЗОЛЯТОРАМ И АРМАТУРЕ ТРЕСТА "ЭЛЕКТРОСЕТЬИЗОЛЯЦИЯ"
ВОЙЛОВ ВИТАЛИЙ ГАВРИЛОВИЧ, КРАСНОВ ВАЛЕРИЙ АНАТОЛЬЕВИЧ, СЕРДЮК ЛЕОНИД ГРИГОРЬЕВИЧ
МПК / Метки
МПК: B21J 5/08
Метки: автомат, высадки, двусторонней
Опубликовано: 15.08.1984
Код ссылки
<a href="https://patents.su/7-1107945-avtomat-dlya-dvustoronnejj-vysadki.html" target="_blank" rel="follow" title="База патентов СССР">Автомат для двусторонней высадки</a>
Гидравлический привод цепного механизма поворота экскаватора

Номер патента: 358552
Опубликовано: 01.01.1972
Метки: гидравлический, механизма, поворота, привод, цепного, экскаватора
...8 и перепускным клапаном 4, а штоковые полости б соединены между со бой. Штоки гидроцилиндров б соединены цепью 7 с поворотной колонкой 8. Каждый из штоков имеет хвостовик 9, во внутренней полости которого расположен плунжер 10 с пружиной 11, пазом 12 и радиальным отверстием 20 18. Хвостовик штока выполнен с радиальнымотверстием 14 и кольцом 15, в котором смонтирован обратный клапан 1 б. На выходном торце плунжера 10 установлен резиновый буфер 17 с осевым отверстием 18, которое соеди няет тормозную полость 19 с поршневой полостью 2 гидроцилиндра, имеющего крышу 20.При подходе плунжера 10 к крышке 20 гидроцилиндра резиновый буфер 17, установлен ный на торце плунжера 10, упирается в крыш358552 7 ЧВ рректорьп Л. Царькова и Л. Новожилова...
Механизм для свинчивания и раз-винчивания штанг

Номер патента: 810933
Опубликовано: 07.03.1981
Авторы: Залятов, Курмашов, Линев
МПК: E21B 19/16
Метки: механизм, раз-винчивания, свинчивания, штанг
...6 соединяется состойкой 5 шлицевым соединением и с помощью гайки 8 и дистанционной трубки 7центрирует привод 1 на устье скважины.Центратор 6 воспринимает также и реактивный момент при свинчивании и развинчивании штанг.Стойка 5 имеет в верхней части воронкудля направления скребков штанг и пазы а,соответствующие выступам б на наружной 15поверхности штангового захвата 2.Штанговый ключ 4 имеет рычаг 10, закрепленный в ключе стопорным винтом 11,и ручку 12. Рычаг 10 выполнен с двумяпроточками, причем каждая проточка рассчитана на определенный момент затяжкирезьб для штанг 3/4" и 1".Работа устройства осуществляется следующим образом.При спуске на штангу 13, находящуюся 25на мостках скважины, надевается захват 2так, чтобы контрключ 3 нашел...
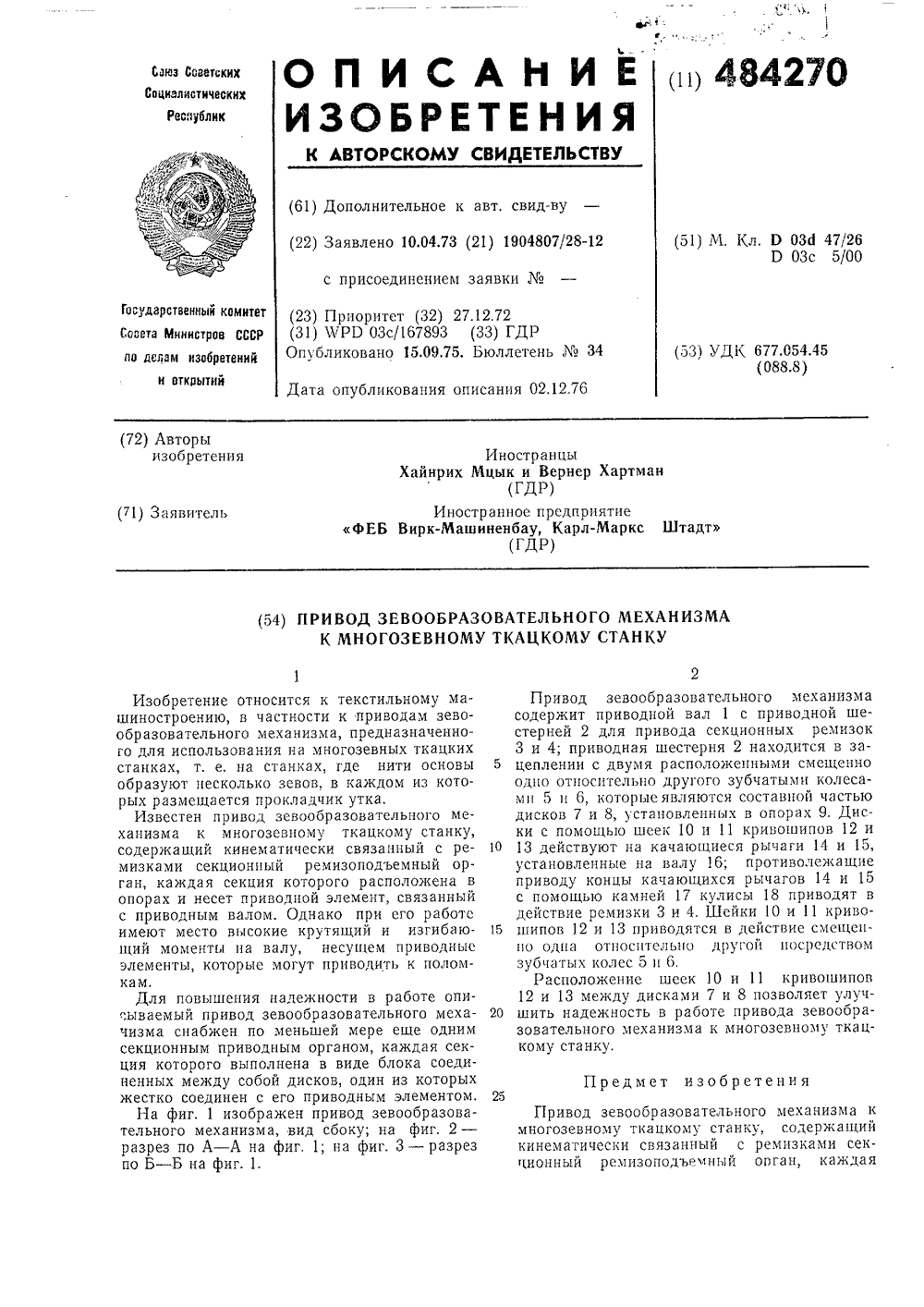
Привод зевообразовательного механизма к многозевному ткацкому станку
Номер патента: 484270
Опубликовано: 15.09.1975
МПК: D03D 47/26
Метки: зевообразовательного, механизма, многозевному, привод, станку, ткацкому
...могут приводить к поломкам.Для повышения надежности в работе описываемый привод зевообразовательного мехачизма снабжен по меньшей мере еще одним секционным приводным органом, каждая секция которого выполнена в виде блока соединенных между собой дисков, один из которых жестко соединен с его приводным элементом.На фиг. 1 изображен привод зевообразовательного механизма, вид сбоку; на фиг. 2 - разрез по А - А на фиг, 1; на фиг. 3 - разрез по Б - Б на фиг. 1. Привод зевообразовательного механизмасодержит приводной вал 1 с приводной шестерней 2 для привода секционных ремизок3 и 4; приводная шестерня 2 находится в за 5 цеплении с двумя расположенными смещевноодно относительно другого зубчатыми колесами 5 и 6, которые являются составной...
Устройство управления приводом грузоподъемного механизма

Номер патента: 540804
Опубликовано: 30.12.1976
Авторы: Аронс, Галиченко, Гехт, Гринец, Дмитриев, Цинман
МПК: B66C 13/22
Метки: грузоподъемного, механизма, приводом
...сегментообразпым подвижным основанием 22 с пружинами 23 и катками 24. Причем на подвижном основании 22 закреплен подвижный элемент 25 датчика 19 перемещения и установлен механический тормоз 3 с электрогидротолкателем 4, а само подвижное основание 22 расположено на катках 24 и связано пружинами 23 с неподвижным основанием 2, на котором закреплен датчик 19 перемещения; на этом реле 20 подключено к датчику 19 перемещения, а замыкающий контакт 21 реле 20 включен последовательно с замыкающими контактами 13, 14 управления контакторов подъема 9 и спуска 10.Схема управления также содержит вспомогательные контакты 26, 27 контактора 9 подьема, вспомогательные контакты 28, 29 контактора 10 спуска, блок 30 питания датчика 19 перемещения и...
Механизм подачи прутка токарного автомата

Номер патента: 554081
Опубликовано: 15.04.1977
Авторы: Гольденберг, Заманский, Тыгипко
МПК: B23B 13/04
Метки: автомата, механизм, подачи, прутка, токарного
...перемещением ролика 10, насаженного на ползушку 11 (см.10 фиг. 4) при помощи винта 12, после чего ползушка 11 укрепляется в пазу ползуна 1 гайкой 13.При перемещении ролика 10 изменяется сопряжение ролика 9 с участком кривой 14 (см.15 фнг, 5), а следовательно, и величина подачипрутка. При длине подачи прутка, меньшей максимальной, ролик 10, а следовательно, ползун 1 предварительно на небольшой длине перемещения разгоняется участком поверх ности кулака 15, что ликвидирует удар привстрече ролика 9 с участком кривой 14.Траектория роликов показана на фиг. 5 штрихпунктирной линией. Величина хода, на котором происходит предварительный разгон, 25 невелика и соизмерима с величиной проскальзывания цанги по прутку, поэтому минимальную величину...
Предыдущий патент: Заготовка для изготовления ступенчатых деталей
Следующий патент: Устройство для изотермической штамповки
Случайный патент: Ролик ленточного конвейера