Способ управления механизированным комплексом в профильной плоскости пласта в направлении движения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки






Текст
ОПИСАНИЕ 5 ЗЗ 4ИЗОБРЕТЕНИЯ Союз Советских Социалистических Республик(22) Заявлено 170878 (21) 2 б 56 797/22-03с присоединением заявки Ио(51)М. Кл. Е 2123/12 Государственный комитет СССР по делам изобретениИ н открытий(088.8) Дата опубликования описания 311080(54) СПОСОБ УПРАВЛЕНИЯ МЕХАНИЗИРОВАННЫМ КОМПЛЕКСОМ В ПРОФИЛЬНОЙ ПЛОСКОСТИ ПЛАСТА В НАПРАВЛЕНИИ ДВИЖЕНИЯ Изобретение относится к способам управления очистным механизированным комплексом по гипсометрии уголь ного пласта или другого полезного ископаемого в направлении движения 1 и особенно к способам управления очистным механизированным комплексом (агрегатом), включающим агрегатную механизированную крепь, на базе которой установлена выемочная машина. 10Известен способ управления очистным механизированным комплексом н профильной плоскости пласта в направлении движения, заключающиися в выполнении очистным механизированным комплексом повторяющихся выемочных циклов при постоянном чередовании и/илн совмещении в циклах операций передвижка базы агрегатной крепи с выемочной машиной (зарубка), отбойка 20 угля выемочной машиной, снятие распора, передвижка и распор секций крепи между боковыми породами, При этом стремятся как можно точнее следовать базой крепи( контролируя 25 изменение ее углового положения) вместе с выемочной машиной по почве (кровле)пласта, т, е, копировать почну, чтобы как можно полнее вынуть уголь иэ плата, оставляя в почве 30 неровности (гребешки)возможно меньшей величины 11.Недостатком известного способа управления очистным механизированным комплексом в профильной плоскости пласта н направлении его движения является возникающее н процессе отработки пластов угля противоречие между стремлением к к можно точнее скопировать базой комплекса (агрегата) почву или кровлю пласта, чтобы полнее вынуть уголь, и кинематичес кими возможностями базы крепи и комплекса копировать почву пласта. Однако углы скручивания пластон, определяющие необходимые кинематические параметры беэ агрегатных механизированных крепей, могут изменяться в широких пределах соответственно для пластов средней мощности до 4,5 и б град/м и значительно превышают воэможности всех баэ серийных и опытных крепей к скручиванию, Ограничены воэможности по интенсивности скручивания базы серийных агрегатных механизрованных крепей до 1 град/м.Наиболее близким решением по технической сущности и достигаемому результату является способ управления механизированным комплеКсом н проФилькой плоскости пласта в направлени движения, включающий выемку углякомбайном; передвижку секций крепи ибазы и установку базы в заранее выбранное по отношению к плоскости пласта угловое положение 2,Недостатками такого способа управления являются недостаточная эффективность управления комплексом и неполнота выемки пласта со сложнойгипсометрией почвы и кровли, так какположение база в процессе передвижения не поддерживается в заранее выбранном угловом положении.Целью изобретения является повышение эффективности управления комплек-сом и полноты выемки пласта со сложной гипсометрией почвы и кровли,Поставленная цель достигается тем,что угловое Положение базы поддерживают неизменным в процессе отработкивыемочного столба, для чего определя Оют угловое положение базы и корректируют посредством домкратов управленияположение базы, которую устанавливают по биссектрисе угла скручиванияпочвы или кровли пласта, 25Укаэанный способ управления очистным механизированным комплексом впрофильной плоскости пласта путемконтроля за изменением на каждом цикле ее углового положения приспосабливаться копировать почву или кровлют. е. гипсометрию пласта ) снимаеттем самым и ограничения по интенсивности скручивания базы, накладываемыегеометрией пласта и выемочной машиной на крепь. При этом рабочие органы выемочной машины как и раньше,перемещаясь относительно базы нормально почве автоматически или управляемые оператором, отрабатывают пластпо границе уголь-порода, достигая ту 40же цель - наиболее полно вынуть уголь.Ио в этом случае уменьшаются ошибкиуправления комплексом, .вызванныенедостаточными на сегодняшний деньтехническими возможностями агрегатных механизированных крепей и особенно их баз по интенсивности скручивания.На Фиг. 1 показан очистной механизированный комплекс, план; на Фиг.2 секция механизированной крепи; наФиг. 3 - кинематическая схема крепи.Очистной механизированный комплекс 1 включает крепь 2, на распорной базе 3 которой установлены чел-нок 1 вый комбайн 4 с двумя исполнитель ными органами 5 по концам, конвейер6, гидрозакладочное оборудование 7.Крепь 2 поддерживающего типа заключает секции крепи, связанные со звеньями базы 3 домкратами 8 и 9. Сек- щция крепи 2 включает основание 10,верхняк 11, стойки 12. Багаза 3 выполнена из звеньев 13, расположенныхвнутри крепи 2, Звено 13 базовойбалки имеет форму уголка, рама-полка у 5 14 которого параллельна основанию и опирается на него двумя гидропатронами 15, другая - телескоп 16 выполнена нормально основанию, телескопичной или распирается домкратом17 между основанием 10 и верхняком 11.Все звенья базовой балки соединены между собой шарнирами (замками) в трех точках в продольном сечении, образуя вдоль забоя три силовых пояса - два на нижней раме 14 и один Ж Корпусе телескопа 16. Домкрат 8 связывает верхний телескоп 16 звена базы 3 с верхняком 11, а домкрат 9 нижнюю раму 14 с основанием 10. Штоковые плоскости домкратов 8 и 9 соединены между собой гидравлически,чем обеспечивается их гидравлическаяобъемная синхронизация и равномерная без угловых колебаний выдвижка базы.Питание домкратов при передвижении базы 3 подводится к поршневойполости домкратов 8, при передвижениисекции крепи 2 - к поршневой полости домкрата 9. Изменение углового положения базы 3 на забой обеспечивается дополнительным домкратом 18. Наклон базы может производиться оператором с пультра ручного управления крепи.Контроль углового положения базы приручном управлении производится замером иэ крепи углового положения рамы 14 базы 3 в трех точках по длине крепи (в серединЕ и по краям) оптическимквадрантом КОМ на каждом выемочном цикле. Корректировка положения базы 3 на забой производится в конце операции по ее передвижке путем включения сразу всех дополнительных домкратов 18 или домкратов 8 при наклоне ее на завал. При автоматическом поддерживании углового положения базы относительно горизонта электролитический датчик или другого типа датчик устанав-. ливают под защитой звена базы накорпусе телескопа 16 с завальной стороны. Сигнал датчика об угловом положении базы передается через усилитель на электрогидрораспределитель,управляющий дополнительным домкратом18 и домкратом каждого звена базы.В процессе движения очистного комплекса 1 в пласте угля он совершает повторяющиеся выемочные циклы, в которых например, для комплекса КВЗ чередуются операции: передвижка базы 3 агрегатной механизированной крепи 2 с комбайном 4, в процессе которой происходит зарубка комбайна 4 снятие распора, подтягивание секций крепи 2 к базе 3 и их распор между боковььщ породами, отбойка угля комбайном 4, перемещающимся по направляющим базы 3 крепи 2 вдоль забоя, раскрепление забоя перед комбайном 4 и крепление его после прохода.Операцию передвижки базы 3 крепи 2 в каждом цикле домкратами 8,9 выполняют принудительно (вручную или автоматически), поддерживая, дополнительными домкратами 18 управления с использованием запаса хода верхних двигательных домкратов 8 и с выбранным в монтажной камере угловым положением базы э пласте относительно горизонта пад углом. Использование запасов хада верхнего двигательного домкрата 8 для управления угловым положением базы 3 производят как на отдельной операции управления, не зависимой от операции передвижки базы 3 или секций крепи, так же как и хода дополнительного домкрата 18 управле ния, так и на совмещенной с передвижкои базы. Операции управления угловым положением базы крепи выполняют как вручную, используя измерительные приборы, так и автоматически под ваз- Я действием датчика углового положения базы 3 крепи 2 в пласте относительно горизонтали (электралитический датчик) или фиксированного направления в профильной плоскости с помощью гидро скопа. Таким образом, выбранное угловое положение "в.н" базы 3 крепи 2 поддерживают на каждом цикле благодаря специальным средствам управления угловым положением базы 3 крепи 2 дополнительным домкратам 18 и запасу хода верхних домкратов 8 на каждой секции крепи 2)вручную или автоматически. Для ручного замера углового положения базы относительно горизонта и других элементов крепи используют оптическне квадранты КО М. Для автоматического контроля положения базы крепи и др. ее элементов используют электролитические датчики угла или автоматические 4 О стабилизаторы угла АУС конструкции ВНИМИ. Передвинув базу 3 крепи 2 и установив ее имеющимися в крепи средствами э заданное угловое положение, исключают возникновение ошибок управ ления комбайном 4 по гипсаметрии пласта, например почвы, вызванных крепыш.Управление комбайном 4 в процессе выемки па почве и кровле производится подъемам и опусканием рабочих органов 5 комбайна 4 с визуальным контролем оператора или дистанционно, автоматически, используя датчики уголь-порода, датчики положения рабочих органов относительно базы 3 Ъ 5 и аппаратуру программного управления. Процесс управления клмбайнам 4 по гипсометрии почвы и кровле будет более оперативным (интенсивным) по времени, если кроме линейнбго движе- щ ния рабочих органов 5 нормально почве и кровле ани будут иметь угловое, управляемое оператором движение относительно базы. Благодаря установке секций базы 3 на каждом цикле в одном угловом относительно пласта или горизонта положении отсутствует скручивание базы, т, е. разница э угловом положении секции базы вдоль крепи, неизбежное в известном способе управления копированием почвы или кровли и создающее ошибки управления комплексом, вызванные разницей ваэможнага и необходимого скручивания базы.Угловое положение базы 3 крепи 2 относительно почвы или кровли пласта выбирают из условия минимального изменения относительно базы положения опорных элементов крепи 2 - верхняков и оснований - в процессе движения комплекса 1 в пласте, т, е. па биссектрисе угла скручивания почвы (на чертеже стрелка "в.н")или кровли пласта на участке выемки угля. Данные па углам скручивания пласта получают маркшейдерскими замерами геометрических параметров пласта при нарезке участка, Для комплекса КВЭ это штрек на нижнем горизонте, один или два ската па бокам столба выемки и кэершлаги. По этим данньм эыбирают предварительное угловое положение базы - угол А, которое затем корректируют по данным геометрии пласта в процессе ега выемки, Геометрические параметры пласта в процессе выемки получают па замерам углавогс положения эерхнякав и оснований комплекса в процессе ега движения в пласте на каждом цикле выемки, а исгальэуют через установленный снытным путем шаг корректировки углового положения, базы крепи. Для измерений проФилей почвы и кровли пласта в скантуривающих стОлб выработках используют гарные компасы, гирокомпасы гирабуссали, и т. д.Использование изобретения позволяет сократить простои оборудования в лаве, связанные с ошибками управления крепыш и комбайном на базе крепи, - уход комбайна в почву или кровлю,Формула изобретенияСпособ управления механизированным комплексом в профильной плоскости пласта в направлении движения, включающий выемку угла комбайнам, передвижку секций крепи и базы и установку базы в заранее выбранное па отношению к плоскости пласта угловое положение, о т л и ч а ю щ и и с я тем, что, с целью повышения эффективности управления комплексом и полноты выемки пласта са сложной гипсаметрией почвы и кровли, угловое положение базы поддерживают ненамеренным в процессе отработки выемочного столба, для чего определяют угловое положение базы и корректируют посредством домкратов упраэленця полажениебазы, которую устанавливают по биссектрисе угла скручивания почвы или кровли пласта.Источники информации, принятые во внимание при экспертизе1. Рудановский А, А, 0 рациональных способах автоматического управления угледобывающими комплексами в профильной плоскости пласта - "Уголь Украины", 1969, 9 7, с. 39-22. 2, Авторское свидетельство СССРМ 603751, кл, Е 21 Р 23/00, 06.08,75775334 Составитель В. ТеклТехред А.АчТи аж 626 одакова Редакто орректор М. Ша к одписно 4/ ФилиаЛ ППП "Патент", г. Ужгород, ул. Проектная,7683/42ВНИИПИ Госудпо делам113035, Мос Рственного коми обретений и от а, Ж, Раушс та ССытийя наб
СмотретьЗаявка
2656797, 17.08.1978
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ И ПРОЕКТНО КОНСТРУКТОРСКИЙ УГОЛЬНЫЙ ИНСТИТУТ
АРСЕНОВ НИКОЛАЙ СЕРГЕЕВИЧ, МИХАЛИЦЫН ВЛАДИМИР АЛЕКСАНДРОВИЧ, КРЫЛОВ ВЛАДИМИР ФЕДОРОВИЧ, ЛИВШИЦ ВЛАДИМИР ИОСИФОВИЧ, КЛЕЙМАН ВЛАДИМИР ДАВИДОВИЧ, АКСАНОВ ШАМИЛЬ ИСХАКОВИЧ, ПЕТРОВ АНАТОЛИЙ ИВАНОВИЧ, ГРИЦКО ГЕННАДИЙ ИГНАТЬЕВИЧ, ИЛЬИН ВЛАДИМИР ИЛЬИЧ
МПК / Метки
МПК: E21D 23/12
Метки: движения, комплексом, механизированным, направлении, пласта, плоскости, профильной
Опубликовано: 30.10.1980
Код ссылки
<a href="https://patents.su/6-775334-sposob-upravleniya-mekhanizirovannym-kompleksom-v-profilnojj-ploskosti-plasta-v-napravlenii-dvizheniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления механизированным комплексом в профильной плоскости пласта в направлении движения</a>
Устройство для обеспечения прямолинейности базы крепи

Номер патента: 735795
Опубликовано: 25.05.1980
Авторы: Аверкиев, Батыгин, Горячий, Кравцов
МПК: E21D 23/16
Метки: базы, крепи, обеспечения, прямолинейности
...с"хвостовиком штока, при этом компен -сатор хода служит поршнем домкрата.На фиг.1 изображена секция механизированной крепи, общий вид; нафиг.2 - гидродомкрат передвиженияс компенсатором.Секция механизированной крепи имеет верхнее 1 инижнее 2 основания, гидростойки 3и 4, ограждение 5, гидродомкратыпередвижения 6 и 7, опорные лыжи 8и 9, гидропатроны 10 и 11 с опорны-.ми роликами 12 и 13,Поршень 14 гидродомкрата передвижения выполнен с внутренней расточкой 15 и с буртиком 16 для взаимодействия с хвостовиком штока, вкоторой размещен хвостовик штока 17с возможностью осевого перемещения.поршня 14 относительно хвостовикаштока 17 на величину дополнительного хода. Поршень крепится к хво"+"стовику-штока с помощью двух полуколец 18....
Способ оценки объема нефтяного пласта, занятого нагнетаемой водой, в процессе разработки залежи заводнением

Номер патента: 1139832
Опубликовано: 15.02.1985
Авторы: Веселов, Хозяинов, Челокьян
МПК: E21B 47/00, E21B 47/022
Метки: водой, заводнением, залежи, занятого, нагнетаемой, нефтяного, объема, оценки, пласта, процессе, разработки
...5730 лет,что намного меньше, чем время разработки нефтяных месторождений. Поэтому уменьшением удельной активности 10радиоуглерода в нагнетаемых водах завремя их пребывания в нефтяном пластеможно пренебречь. Следовательно,уменьшение удельной активности радиоуглерода в попутно добываемой воде по 15сравнению с нагнетаемой водой связанотолько с разбавлением нагнетаемой воды пластовой водой. Это позволяетопределять долю пластовой воды в попутно добываемой воде. 20Уменьшение удельной активноститрития в добываемой воде по сравнениюс нагнетаемой будет происходить какза счет разбавления пластовой водой,так и за счет радиоактивного распада 25(Т 1=12,3 года). Определив степеньразбавления пластовой водой по анализу радиоуглерода, можно...
Способ определения положения фокальной плоскости оптической системы

Номер патента: 1383128
Опубликовано: 23.03.1988
Авторы: Бабиченко, Саар, Соскинд
МПК: G01M 11/00
Метки: оптической, плоскости, положения, системы, фокальной
...частот и определенной КВФ распространение излучения описывается в рамках геометрической оптики как распространение совокупности лучей, исходящих из центра КВФ под углами к оптической оси, определяемыми спектром угловых,частот источника.Линейное расстояние х между максимумами интенсивности излучения (полосами) в плоскости регистрации, соответствующее угловому расстоянию ьу между двумя угловыми частотами иэ спектра излучения источника, опреде" ляется по формулеот относительного положения центра КВФ источника излучения и исследуе,мой ОС.В случае расфокусировки, т.е. при йГ Ф О, изменение расстояния между5 максимумами интенсивности в плоскости регистрации, обусловленное изменением положения центра КВФ источника, пропорционально...
Устройство для определения положения фокальной плоскости объектива
Номер патента: 1154573
Опубликовано: 07.05.1985
МПК: G01M 11/00
Метки: объектива, плоскости, положения, фокальной
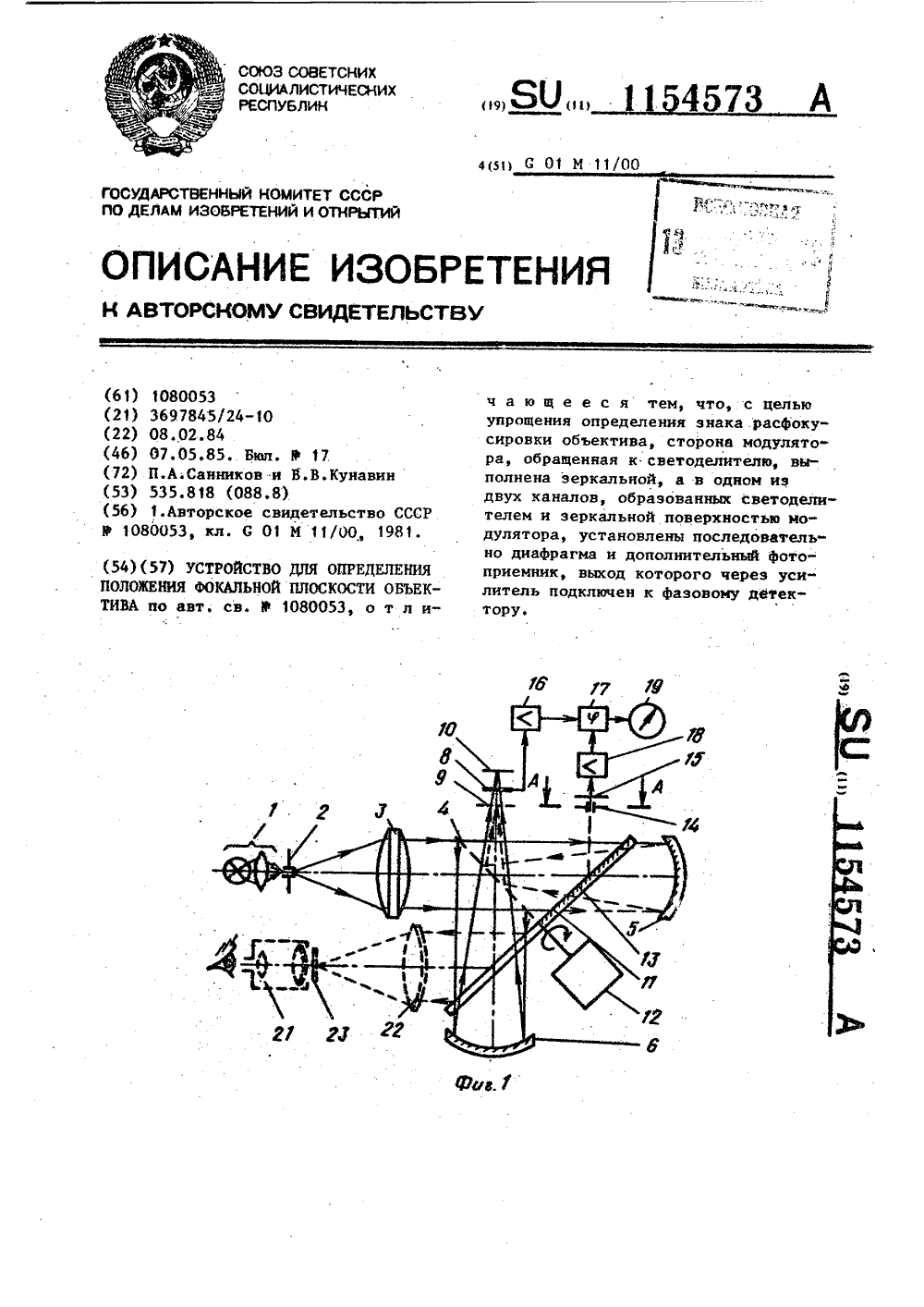
...коллиматорный объектив 7. Соосно отражающей поверхности 6 по другую сто-рону светоделителя 4 установлена све топриемная площадка 8 фотоприемника. Светоприемная площадка 8 установлена между фокальными плоскостями 9 и 10 фокусирующих элементов. Фокальная плоскость 9 образована фокусирующим элементом, содержащим сферическое зеркало 5 (фиг, 1) или плоское зеркало 5 и объектив 7 (фиг.2),а фокаль- ная плоскость 1 О образована фокусирующим элементом, содержащим сфери- ЗО ческое или плоское зеркало 6. Между отражающими поверхностями 5, 6 и сзетоделителем 4 установлен модулятор света, выполненный в виде непрозрачного полудиска 11, закрепленного на ва лу электродвигателя 12. Сторона 13 полудиска 11, обращенная к светодели,телю 4, выполнена...
Устройство для определения положения фокальной плоскости объектива

Номер патента: 1224643
Опубликовано: 15.04.1986
Автор: Санников
МПК: G01M 11/00
Метки: объектива, плоскости, положения, фокальной
...вызывая в его выходной цепи электрический сигнал, который после усиления в усилителе 21 запитывает обмотку электромагнитного реле 22. Реле срабатывает и, замыкая контакт 30, соединяет управляюший вход исполнительного механизма 24 с выходом фазового детектора 29, переключая тем самым управление исполнительным механизмом 24 на управление от электрического сигнала основного фотоприемника 8. В цепи фотоприемника 8 в это же время О образуется пульсирующий по амплитуде электрический сигнал, соответствующий разности освешенностей в плоскости его светочувствительного слоя, создаваемых световыми пучками, идущими от отражаюших поверхностей 5 и 6. Этот электрический сигнал после усиления, преобразования и определения полярности при...
Предыдущий патент: Устройство для удержания забоя от обрушения
Следующий патент: Устройство дистанционного управления секцией механизированной крепи
Случайный патент: Многоканальное устройство приоритета