Устройство для стабилизации процесса рассева удобрений центробежным аппаратом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки






Текст
(55 ГОСУДАРСТВЕННОЕ ПАТЕНВЕДОМСТВО СССР(57) Сущность и держит датчики рассева, датчик тора рассева, и тель 6 плотно управления, ан ватель 5, испол двигателем 8 управления эле го тока и блок 1 зоб ретения 1 и 3 начала 2 заданног змерительн сти потока алого-цифр нительный о постоянног ктродвигат 0 индикаци ИИ НТ ВТОРСКОМУ СВИДЕТЕ(71) Азово-Черноморский институт мехазации сельского хозяйства(54) УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦПРОЦЕССА РАССЕВА УДОБРЕНИЙ ЦЕРОБЕЖНЫМ АППАРАТОМ: устройство сои конца сектора положения секй преобразовачастиц, блок 4 вой преобразорган 9 с электротока, схему 7 лем постоянно- и. 6 ил,Изобретение относится к сельскохозяйственному машиностроению, а именно кприборам и устройствам для контроля и управления процессом рассева материала машинами с центробежными рабочими 5органами, а также может быть использованои в других отраслях народного хозяйствадля управления процессами распределениявеществ бросковыми аппаратами,Целью изобретения является выполнение операций контроля за ходом процессарассевэ и упрощение конструкции устройства,На фиг,1 представлена функциональ-ная схема устройства; на фиг.2 изображена схема взаимного расположения диска ипривода штанги измерительного преобразователя; на фиг,З - разрез А-А на фиг.2; нафиг.4 изображена схема исполнительногомехаййзма; на фиг,5 - блок управления; на 20фиг,б приведена схема к обоснованию выбора места расположения датчиков у однодискового разбрасывателя.Устройство для стабилизации процессарассева удобрений центробежным аппаратом содержит датчик 1 (см,фиг.1) начала сектор рассева, датчик 2 заданного положениясектора рассева, датчик 3 конца секторарассева, которые подключены соответственно к первому, второму и третьему входам 30блока 4 управления. Четвертый вход блока4 управления связан с выходом аналогоцифрового преобразователя 5, к первомувходу которого подключен измерительныйпреобразователь 6 плотности потока чэстиц, К первому выходу блока 4 управлениячерез схему 7 управления подключен электродвигатель 8 постоянного тока. Второй выход блока 4 управления связан сисполнительным органом 9. Третий выход 40блока 4 управления соединен с блоком 10индикации, а к четвертому выходу блока 4управления подключен второй вход аналого-цифрового преобразователя 5,45Аналого-цифровой преобразователь 5выполнен на основе микросхемы К 572 ПВЗ,Блок индикации 10 выполнен на светодиодах АОЛ 110 А,Измерительный преобразователь б 50плотности потока частиц выполнен в видепьезодатчика; помещенного в герметичныйкорпус, Измерительный преобразователь бзакреплен на штанге 11 (см, 2,3) консольно.Штанга 11 установлена с возможностью поворота относительно оси 12 вращения центробежного диска 13. К штанге 11прикреплено зубатое колесо 14 входящее взацепление с шестерней 15, жестко установленной нэ валу электродвигателя 8 постоянного тока, Электродвигатель 8 прикреплен к пластине 16 чашеобразной формы, которая закреплена на корпусе редуктора 17. Редуктор 17 закреплен на раме разбрасывателя (на фиг, не показана) и осуществляет привод центробежного диска 13,На пластине 16 установлены с возможностью взаимодействия со штангой 11 датчики 1, 2 и 3. Датчик 1 установлен в начале сектора рассева, а датчик 3 - в конце. Угол между датчиками 1 и 3, измеренный в направлении вращения диска 13, равен 2 а (см.фиг,З), На середине угла 2 а закреплен датчик 2 заданного положения сектора рассева, выполненный в виде микропереключателя.На раме раэбрасывателя закреплены пластины 18(см.фиг,4) в пазах которых установлен с воэможностью перемещения туконаправитель 19. Нэ нерабочей стороне туконаправителя 19 закреплена гайка 20, взаимодействующая с винтом 21. Винт 21 соединен с валом электродвигателя 22, закрепленного на раме разбрасывателя,Блок 4 управления включает (см,фиг.5) интегральную микросхему 23 типа К 1816 ВЕ 48, микросхему ввода 24 типа К 580 ВА 86, Выводы 26, 27, 28 микросхемы 24 подключены соответственно к датчикам 1, 2, 3 начала, заданного положения и конца сектора рассева,Выводы (Р 10.Р 17) 29, 30, 31, 32, 33, 34, 35,36 микросхемы 23 подключены к выходу аналого-цифрового преобразователя 5, а выводы (А( Е, ВО) 37, 38 связаны со вторым входом аналого-цифрового преобразователя 55,Выводы 39, 40 микросхеммы 25 подключены к входу блока 10 индикации, вывод 41 микросхемы 25 связан с входом схемы 7 управления, а выводы 42, 43 соединены с входом исполнительного органа 9.Выводы 44, 45 46 микросхемы 24 подключены соответственно к выводам (Р 10, Р 11, Р 12) 47, 48, 49 микросхемы 23,Выводы 50, (нйТ) 51 через кнопку "Сброс 52, (Чсс) 53, (ЯБ) 54, (ЧО) 55 микросхемы 24 подключены через кнопку Пуск 56 к источнику питания + 5 В,К выводам (ХТА 1) 57, (ХТА 2) 58 подключен кварцевый резонатор 59, а они в свою очередь через конденсаторы (С) 60, (С 2) 61, а так же вывод (С 3 В) 62 через конденсатор (Сз) 63 и выводы (ЕА) 64, (Ч) 65 подключены к земле,Выводы микросхемы 23 (Р 2 о, Р 21, Р 22, Р 2 з, Р 24) 66, 67, 68, 69, 70 присоединены соответственно к выводам 71, 72, 73, 74, 75 микросхемы 25, а вывод 76 микросхемы 2510 постоянного тока. Электродвигатель 8 через зубчатую передачу 14 - 15 перемещает 25 30 35 40 в данной точке сектора рассева, соответствующий интенсивности потока частиц схо преобразователя 5 подается сигнал на сброс информации от измерительного преобразователя 6, 55 подключен к источнику питания+5 В. вывод 77 связан с "землей",Устройство работает следующим образом.После включения рабочих органов разбрасывателя оператор (механизатор) при необходимости выполнения операций настройки или контроля процесса рассева нажатием кнопки Пуск включает устройство вработу. При включении устройства в работу блок 4 управления тестирует блок 10 индикации, то есть включает светодиоды блока 10 индикации на некоторое время, а затем их отключает. Это позволяет оператору убедится в исправности блока 10 индикации. После этого блок 4 управления вырабатывает сигнал, который через схему 7 управления включает электродвигатель 8 штангу 11 с измерительным преобразователем 6 в секторе рассева удобрений.Если через время т 1 штанга 11 с измерительным преобразователем 6 не переместится в начало сектора рассева, то есть на блок 4 управления не поступит сигнал от датчика 1 начала сектора рассева, то блок 4 управления вырабатывает сигнал на схему 7 управления для отключения электродвигателя 8, а также сигнал на включение одного из светодиодов блока 10 индикации, сигнализирующего о неисправности устройства, При достижении штангой 11 начала сектора рассева сигнал об этом от датчика 1 поступает в блок 4 управления, который через промежуток времени тг вырабатывает сигнал на включение аналого-цифрового преобразователя 5. Этот сигнал служит командой на преобразование аналогового сигнала от измерительного преобразователя.6 в цифровую форму. Сигнал от измерительного преобразователя 6, находящегося дящих с лопаток центробежного диска 13 поступает на первый вход аналого-цифрового преобразователя 5, а затем в цифровой форме поступает на четвертый вход блока 4 управления, Этот сигнал в блоке 4 управления накапливается в ячейке памяти 31, после чего на второй вход аналого-цифрового Через время 12, после того как штанге 11 с измерительным преобразователем 6 переместится в другую. точку сектора рассева цикл измерения повторится. Когда штанга 11 с измерительным преобразователем 6 достигнет датчика 2 заданного положения сектора рассева на второй вход блока 4 управления будет подан сигнал от датчика 2 на начало накопления суммы в ячейке памяти Я 2 блока 4 управления. Накопление информации в ячейке памяти 32 будет происходить до тех пор пока штанга 11 с измерительным преобразователем 6 не достигнет конца сектора рассева и на третий вход блока 4 управления не будет подан сигнал от датчика 3 конца сектора рассева.После этого в блоке 4 управления анализируется содержимое ячеек памяти Я 1 и Яг.5 Если 31 = 0 и 52 = О, то блок 4 управленияформирует сигнал на схему 7 управления для отключения электродвигателя 8 привода штанги 11 индикации для включения соответствующего светодиода. Этот сигнал информирует оператора (механизатора) о нарушении технологического процесса рассева удобрений (причинами нарушения могут быть: закончились удобрения в бункере; нет подачи материала на диск; не вращается диск 13 или другая неисправность). Этим достигается поставленная цель - контроль технологического процесса рассева удобрений,Если содержимое ячеек памяти 31 и Я 2не равны нулю, то в блоке 4 управления вычисляется разность этих сумм Яз=Я 1-Яр и полученный результат Я сравнивается с заранее определенной погрешностью измерений Е и -Е. В зависимости от полярности суммы Яз на втором выходе блока 4 управления формируется сигнал, подаваемый на исполнительный орган 9; который производит включение вращения электродвигателя 22, Если ЯзЕ электродвигатель 22 включается на. вращение винта 21 по ходу часовой .стрелки (правая резьба) или против хода часовой стрелки (левая резьба). При условии Яз-Е блоке 4 управления формирует сигнал на включение вращения винта 21 против хода(правая резьба) или по ходу(левая резьба) часовой стрелки, перемещая туконаправитель 19 по пазам пластин 18 в новое положение на один шаг винта 21.Когда штанга 11 с измерительным преобразователем 6 достигнет начала сектора рассева, на первом входе блока 4 управления появится сигнал от датчика 1 начала сектора рассева и процесс работы устройства повторится. Это будет происходить до тех пор, пока не выполнится условие- ЕЯз+Е, При достижении этого условия сектор рассеваустанавливается в заданном положении.При отклонии сектора рассева от требуемого положения, что возможно при изменении фрикционных свойств удобрений (изза изменения влажности или вида удобрений), подачи, при работе на склонах и т.д.процесс стабилизации положения сектора.рассева возобновляется. 5На равномерность распределения удобрений по поверхности поля оказывает влияние место расположения датчиков 1 начала,2-заданного положения и 3 - конца сектора рассева, Датчики 1 и 3 необходимо 10 размещать в пределах угла сектора рассева так, чтобы между углом сектора рассева 2 а и углом 2 асектора контроля выполнялось условие. 2 а 2 а 15 . Датчик 2 заданного положения сектора рассева должен быть расположен так, чтобы угол между векторами скорости метания Чо частиц в середине вектора и вектором скорости Чм движения машины был равен задан ному. Для однодискового разбрасывателя его обычно принимают равным нулю (см.фиг.б), то есть касательная к окружности условного радиуса йудиска 13, приведенная через точку пересечения центра измери тельного преобразователя 6 в середине сектора рассева на радиусе Вл должна : составлять с вектором Чм заданный угол.Положение штанги 11 позволяет найти место размещение датчика 2 заданйого поло жения сектора. рассева. Датчики 1 и 3 располагают симметрично относительно . датчика 2 ранее описанным способом. У двухдисковых разбрасывателей угол а обычно принимают (30-45) град, Радиус Яу 35 связан срадиусом В диска 13 соотношением;Ву = (0,850,90)й,Использование устройства для стабили зации процесса рассева удобрений центробежными аппаратами позволяет снизить неравномерность рассева до (10-15)ф 6, упростить процесс настройки машины на симметричность рассева и осуществлять контроль за работой устройства и ходом технологического процесса рассева.Формула изобретения Устройство для стабилизации процесса рассева удобрений центробежным аппаратом, содержащее туконаправитель, установленный с возможностью перемещения, измерительный преобразователь плотности потока частиц, закрепленный на поворотной относительно оси вращения разбрасывающего диска штанге, датчики заданного положения сектора рассева, установленные с возможностью взаимодействия со штангой, блок управления, аналого-циФровой преобразователь, исполнительный орган, включающий усилитель и исполнительный орган, выполненный в виде электродвигателя и винтовой пары,.винт которой связан с валом электродвигателя а гайка - с туконаправителем, при этом к входам блока управления подключены соответственно датчик начала сектора рассева, датчик заданного положения сектора рассева и датчик конца сектора рассева, отл ича ю щее с я тем, что, с целью контроля за ходомпроцесса рассева и упрощения конструкции, оно снабжено блоком индикации и электродви-, гателем постоянного тока, который через схемууправления связан с первым выходом блока управления, к второму выходу которого подключен исполнительный орган, к третьему выходу присоединен блок индикации, а к четвертому выходу подключен второй : вход аналого-цифрового преобразователя, к первому входу которого присоединен измерительный преобразователь плотности потока частиц, а выход соединен с четвертым входом блока управления, при этом датчики начала и конца.сектора рассева и датчик заданного положения сектора рассева подключены соответственно к первому, третьему и второму входам блока управления,180651 б кои . 1ам%а сии ксл нг УРД Ф/ сржу Фиг,6оставитель С,Паневехред М,Моргентал Корректор Н.Ревская Редактор Т,Иванов ственно-издательский комбинат "Патент", г, Ужгород, ул,Г ои на,Заказ 1332 ТиражВНИИПИ Государственного комитета по113035, Москва, ЖПодписноеобретениям и открытиям при ГКНТ ССРаушская наб., 4/5
СмотретьЗаявка
4911671, 18.02.1991
АЗОВО-ЧЕРНОМОРСКИЙ ИНСТИТУТ МЕХАНИЗАЦИИ СЕЛЬСКОГО ХОЗЯЙСТВА
ЗАБРОДИН ВИКТОР ПЕТРОВИЧ, ПАНЕВ СЕРГЕЙ БОРИСОВИЧ
МПК / Метки
МПК: A01C 15/00
Метки: аппаратом, процесса, рассева, стабилизации, удобрений, центробежным
Опубликовано: 07.04.1993
Код ссылки
<a href="https://patents.su/6-1806516-ustrojjstvo-dlya-stabilizacii-processa-rasseva-udobrenijj-centrobezhnym-apparatom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для стабилизации процесса рассева удобрений центробежным аппаратом</a>
Устройство для контроля датчика положения

Номер патента: 489085
Опубликовано: 25.10.1975
Авторы: Андрюков, Неплохов, Шварцман
МПК: G05B 23/02
...на сбро"а 2 1.7;".ЛЧгна;аГа таГОВОУ 0 ЯВИаТАИЛИф:,г ) Ига СгДгаЧЩСВ ДОЛ;",С 4 т 7 гоыт . а;Овьг Чт-г,:=, С; И ТОЛЬГО В ОДЧСМ Гу лРВОМ лодгХ,е КИИ аГОВОгго ДБгЯТЕгг рОЧСХодгт " раг гг 2 лОВга и ОднСла даггг.,с случае неисправности датчика 1 или усилители 4 типа ерегор,ние ампо:п,и огСУГС ВИ: ЧУлс ВгтЕЛЬгголлгг УУОлиодагВИ 8 ЧУВСТВРР 8 ЛЬНОСТИгСггдиЕЛ т,ф 1Во всех положениях датчпса 1 на выходе усилителя 4 будет сигнал О,Следователь НО ИадигИЕ СГггкада гг( гг В ДВгх СОСЕДгИХ ПОЛОЖЕНКИХ Вана датчгжа 1 СВИдЕТЕЛЬСтву= ет о е 0 неисправиостгиР ГСГщМО-ЛИ 1 Сг";.ггайг.-ГД; ДаГЦгСРУЛ .ОГО 0 ЧОЖЕНИЯ НРИСГгРЯВЕИ," :10 г зом Рл Ь лоДЭ "ГСИЛИТЕпя уСтакаВЧИВЯЕТСЯ урОВЕНЬ "О" а ка Выходе иивеитора 2:-уровеньЕРВЫИ гомаНЦНЫЙ ИПГГГЬС ГОООДЧ ч 80 ез...
Датчик положения ротора электрической машины

Номер патента: 1458946
Опубликовано: 15.02.1989
Авторы: Давидьян, Крутяков, Овчинников, Рябов
МПК: H02K 29/06
Метки: датчик, положения, ротора, электрической
...Для этого напряжение с выходадемодулятора подается на вход управ-,ляемого компаратора 13, где сравнива; ется с напряжением источника .8 опорного напряжения, поданным на второй вход управляемого компаратора. В мо-. менты времени, когда демодулированное напряжение превосходит управляющееопорное напряжение, на выходе управляемого компаратора вырабатываетсясигнал (фиг.2 д, е), который подаетсяна вход триггера и переключает егов соответствии с положением ротора(Фиг.2 ж, и),Как следует из диаграммы фиг.2,если уровень управляющего напряжения1выбран примерно равным максимальному значению демодулированного напряжения, но несколько ниже, то переключающий сигнал приходится на моменты времени, соответствующие моменту прохождения нейтрали осью...
Устройство для коррекции показаний датчиков положения нажимных винтов прокатного стана

Номер патента: 480048
Опубликовано: 05.08.1975
Авторы: Зайцев, Кувшинов, Ляндрес, Сухов
МПК: G05B 1/01
Метки: винтов, датчиков, коррекции, нажимных, показаний, положения, прокатного, стана
...с запоминающего блока 7 берется таким, чтобы выходной код арифметического блока 8 был равен выходному коду датчика 1,Такой ввод коррекции в показания одного датчика положения, позволяет сохранить привязку нулей нажимных винтов.При включенном ключе 9 из формирователя 5 поступает команда Перепись, действующая во все время раздельной работы, От ее переднего фронта срабатывает формирователь 10, формирующий команду формирование разрешения на запись коррекции, от которой срабатывает триггер 11, выдающий команду Разрешение записи коррекции и разрешает прохождение ситнала от схемы ИЛИ 12 через схему И 13. По окончании раздельной работы команда Перезапись снимается, срабатывают формирователи 14 - 16, которые соответственно производят сброс,...
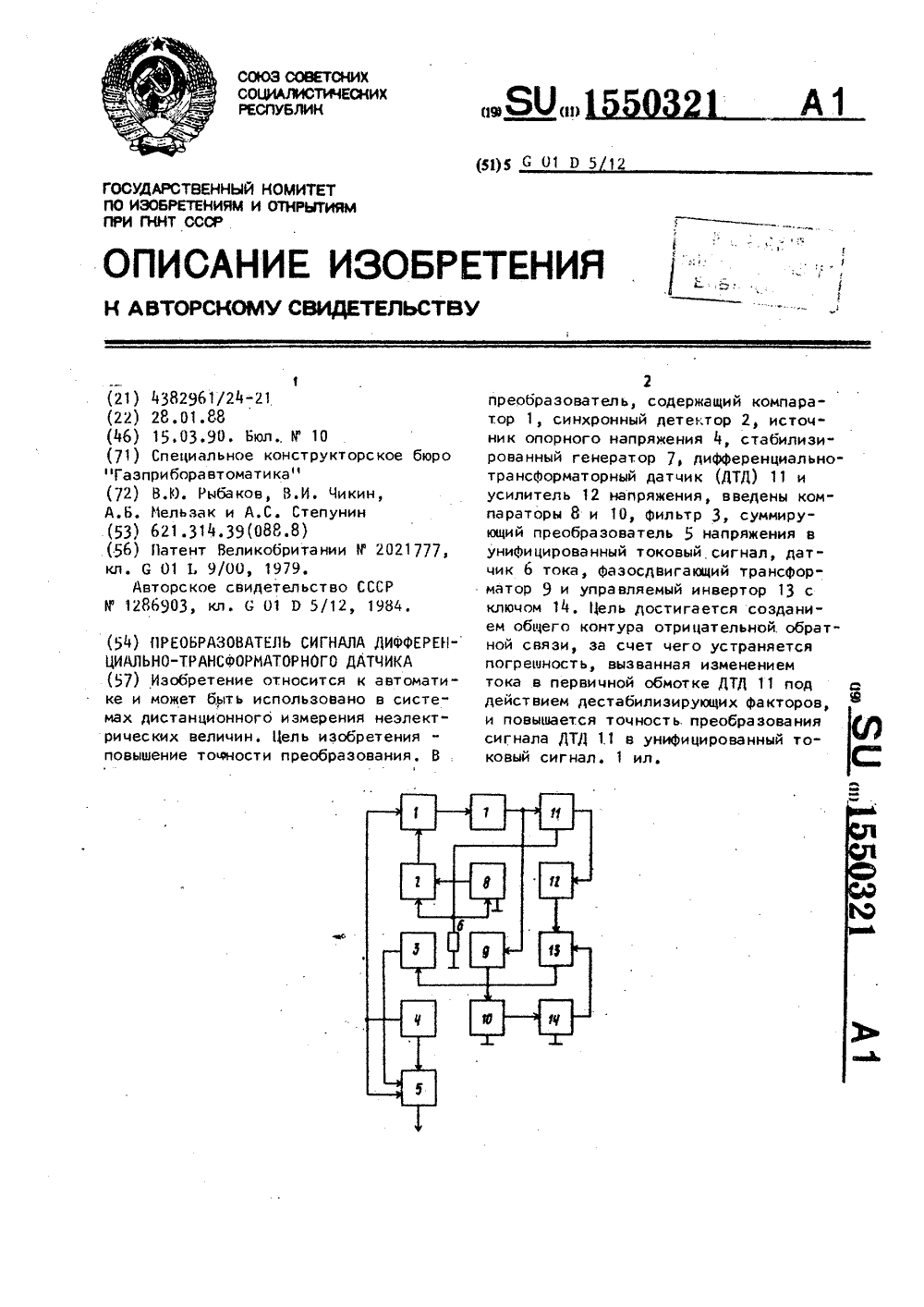
Преобразователь сигнала дифференциально-трансформаторного датчика
Номер патента: 1550321
Опубликовано: 15.03.1990
Авторы: Мельзак, Рыбаков, Степунин, Чикин
МПК: G01D 5/12
Метки: датчика, дифференциально-трансформаторного, сигнала
...с выхода датчика 6 тока. в постоянное в схеме преобразователя применен синхронный детектор 2, управляющий сигналдля которого Формируется компаратором 8 из того же сигнала с вьхода датчика 6 тока.Таким образом, стабилизация токапитания первичной обмотки ДТД 11 осуществляется с помощью одного контураобратной связи, состоящего из датчика6 тока, синхронного детектора 2, компаратора 1, стабилизироэачного гене -ратора 7 и первицной обмотки ЛД 11, 1550321Таким образом, нестабильность величины тока, питающего первичную обмоткуДТД 11, зависит только от точностиодного элемента - компаратора 1 иконтура обратной связи, охватывающе 5го всю цепь питания ДТД 11.Выходное напряжение с вторичной обмотки ДТД 11 поступает на усилитель12 напряжения, с...
Устройство для измерения времени установления выходного сигнала цифроаналогового преобразователя

Номер патента: 1644377
Опубликовано: 23.04.1991
Автор: Клочан
МПК: H03M 1/10
Метки: времени, выходного, преобразователя, сигнала, установления, цифроаналогового
...на фиг, 2 г единичный сигнал на выходе компаратора 7, разрешающий прохождение импульсов генератора 11 в пересчетную схему 13 (фиг, 2 д), В момент переключения компаратора 8 (момент 1 на фиг, 2 е) на его выходе формируется единичный сигнал, разрешающий прохождение импульсов генератора .11 в пере- счетную схему 14 (Фиг, 2 ж).При дальнейшем возрастании сигнала У 1 срабатывает компаратор 7 и на его выходе формируется нулевой сигнал (моментна Фиг, 2 г), блокирующий вход пересчетной схемы 13, и она обнуляется (Фиг. 2 д). С течением времени сигнал Б 11 А начинает убывать. При достижении равенства сигналов 011 и (Уэт+ Д) компаратор 7 переключается в исходное состояние (момент на Фиг. 2 г), при этом пересчетная схема 13 начинает новый счет...
Предыдущий патент: Захват высаживающего аппарата посадочной машины
Следующий патент: Способ вегетационных подкормок орошаемых сельскохозяйственных культур
Случайный патент: Станок для контроля герметичности консервных банок