Способ контроля разности частот двух синусоидальных сигналов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки






Текст
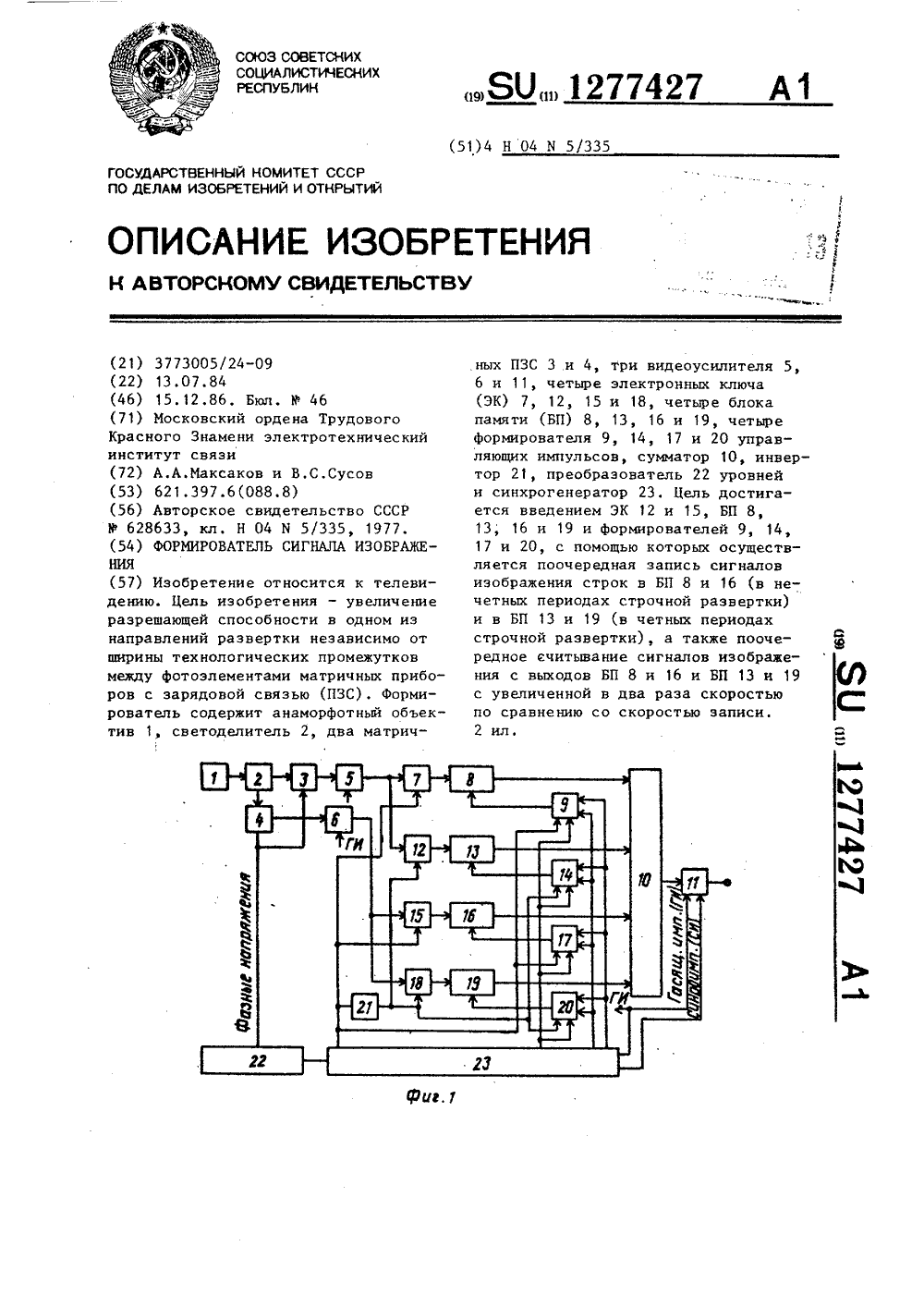
союз советскихСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК ЯЛ 1774280 А 1 5 г)5 О 01 В 23/ ОМИТЕТОТКРЫТИ ГОСУДАРСТВЕННЫЙПО ИЗОБРЕТЕНИЯМПРИ ГКНТ СССРгс ггг,ОБРЕТЕН И У СВИДЕТЕЛЬСТВ К АВТОР(21) 4899389/21 (22) 03.01,91 (4 б) 07.11,92. Бюл (71) Белорусский (72) Ф.А.Романю (56) Авторское св М 1707560, кл, 6 (54) СПОСОБ КО ТОТ ДВУХ СИН руют первыи и налы как сумму го и сдвинут четвертый до сумму и разн сдвинутого с два мгновенн тырех дополни частот опред, М.41политехнический инстик и В.Ю.Румянцевидетельство СССР01 В 23/00, 1988.НТРОЛЯ РАЗНОСТИ ЧУСОИДАЛЬНЫХ СИГ М=Ь 9 гг(9-к) г йсс1иггиггип-и 11 г и 1 ги 1г г 2 2 гиг, (и,-иц)- ии (игггиги визг и 1 изг2 2 г г 2ичии илг ии(имгде 011, 021, Оз 1, 041, 012; 022, Оз 2, 042 - мгновенные значения первого, второго, третьего, четвертого дополнительных сигналов в начале и конце эталонного интервала времени Л 1, Устройство для реализации способа содержит преобразователи 1, 2 напряжения, фазовращатели 3, 4, сумматоры 5, 7, вычитатели б, 8, четыре аналого-цифровых преобразователя 9, управляемый генератор 10 импульсов, элемент 11 задержки, блок 12 памяти, цифровой индикатор 13. 3 ил, 44 ЛОВ(57) Изобретение относится к измерительной технике и может быть применимо для контроля разности частот двух низкочастотных синусоидальных сигналов. Способ контроля разности частот двух синусоидальных сигналов, основанный на одновременном измерении в начале и в конце эталонного интервала времени мгновенных значений двух пар синусоидальных сигналов, сдвинутых по фазе в каждой паре на угол 7 г/2, отличается тем. что, с целью повышения точности и расширения функциональных возможностей способа, из первого и второго исходных сигналов путем сдвига последних в произвольнуэ сторону без изменения амплитуд на у:тановленные углы получают первый и второй сдвинутые сигналы, формивторой дополнительные сиги разность первых исходноого сигналов и третий и полнительные сигналы, как ость вторых исходного и игналов, фиксируют по ых значения каждого из четельных сигналов, разность еляют согласно формулеИзобретение относится к электротехнике. а именно к электрическим измерениям, и предназначено для контроля разности частот двух низкочастотных синусоидальных сигналов,Известен способ контроля разности частот двух синусоидальных сигналов (авт. св. СССР Ъ 1345286, кл. Н 02 ) 3/06, опублик.1987), при котором фиксируют по три мгновенных значения каждого из двух контроли 510 руемых напряжений через эталонные 15 ными функциональными возможностями вследствие его неработоспособности в случае, когда в момент фиксации второго мгновенного значения один из контролируемыхсигналов проходит через ноль,20 25 30 Наиболее близким к предлагаемому по сущности и достигаемому результату является способ контроля разности частот двух синусоидальных сигналов (авт. св, СССР М 1707560, кл. 6 01 В 23/00, Н 02 Н 3/06, 26.07,88), при котором одновременно измеряют мгновенные значения этих сигналов, формируют эталонные промежутки времени и фиксируют следующие через них мгновенные значения первого и второго контролируемых сигналов, дополнительно сдвигают каждый иэ сигналов на угол г 2/2, измеряют мгновенные значения сдвинутых сигналов одновременно с измерением мгновенных значений контролируемых сигналов, фиксируют по два значения каждого из упомянутых. сигналов, следующ.ах через эталонный промежуток времени, и по зафиксированным значениям контролируе 35 мых и сдвинутых сигналов определяют модуль разности частот.Основной недостаток данного способа заключается в потере точности вычисления модуля разности частот при отклонении частот контролируемых напряжений от расчетных значений, т.к, в этом случае создаваемые фазосдвигающими элементами фазовые сдвиги отличаются от заданных д/2. Кроме того, указанный способ не позволяет определить знак разности частот, что ограничивает его функциональные воэможности. 40 45 50 Цель изобретения - повышение точности и расширение функциональных возможностей способа,На фиг,1 и 2 поясняется сущность способа; на фиг,З представлена структурная 55 схема аналого. цифрового устройства дляреализации способа,промежутки времени и по этим значениямопределяют модуль разности частот,Указанный способ обладает ограничен Способ контроля разности частот двух синусоидальных сигналов основан на сдвиге каждого исходного сигнала в произвольнуе сторону без изменения амплитуды на установленный угол, определяемый допустимой погрешностью и быстродействием измерения, формировании первых и вторых дополнительных сигналов соответственно как суммы и разности первых исходного и сдвинутого сигналов, третьего и четвертого дополнительных сигналов как суммы и разности вторых исходного и сдвинутого сигналов и фиксации в начале и в конце эталонного промежутка времени мгновенных значений каждого из четырех дополнительных сигналов,Разность частот определяют согласно математическому выражению 011, 021, Оэ 1, 041 - мгновенные значения соответственно первого, второго, третьего, четвертого дополнительных сигналов в начале эталонного интервала времени,012, 022, Оз 2, 042 - мгновенные значения соответственно первого, второго, третьего, четвертого дополнительных сигналов в конце эталонного интервала времени;Л 2 - эталонный интервал времени.Сущность способа определения разности частот двух синусоидальных сигналов состоит в следующем, . Предположим, что первый исходный сиНУСОИДаЛЬНЫй СИГНаЛ Оах 1 СДВИГаЮт На УСтановленный для заданного значения частоты в 1 угол а(фиг.1 а): 1 а(в 1 )Осг= Оах 1 е(2) Операцию сдвига выполняют таким об- РаЗОМ, ЧтОбЫ аМПЛИтУДЫ ИСХОДНОГО Оах 1,макс И СДВИНУТОГО Ос 1,макс СИГНаЛОВ На ВСЕХ ЧаС- тотах были равны Овх 1,макс - ОС 1,макс Установленное значение угла а выбирают.по двум критериям: допустимой погрешности и быстродействию измерения, Минимальная погрешность измерения обеспечивается при угле а, близком к л /2, для заданной частоты, являющейся средним значением диапазона измерения за счет выравнивания амплитуд дополнительных сигналов. 1а =Ц пу-к) а ссо,к у -хцЦ;2 ЛМ"2 2 г ггдеИг 2 И 21 И 1 г Ин) ИгИцИгг иг 1)2 г г г гИ 21(И Ип) ИиИгг И 21 )42 И 4 г )МИг И 4 )И 1 У -И )-И(И -Иг )Максимальное быстродействие измерения достигается при угле гг, близком к О,Поэтому оптимальный угол гг находится вдиапазоне от 0 до 7 т /2, а его установленноезначение выбирается в зависимости оттого, 5какой из критериев является определяющим,Первый дополнительный сигнал 01 и второй дополнительный сигнал 02 формиру Ют ИЗ ПЕРВОГО ИСХОДНОГО Овх 1 И СДВИНУТОГО по отношению к небу без изменения амплитУДы на Установленный Угол а сигнала Ос 1 по соотношениям 15 01 = Ос 1+ Овх 102.= Ос 1 -Овх 1 ПосколькУ амплитУды сигналов Овх 1 и 20 Ос 1 равны на всех частотах, дополнительные сигналы 01 и О 2 всегда являются диагоналями ромба, образованного векторами Овх 1 И Ос 1, В СВЯЗИ С ЧЕМ УГОЛ МЕЖДУ ВЕКтО- рами 01 и 02 составляет,7 г/2 и не зависит от 25 фаЗОВОГО СДВИГа а МЕЖДУ Овх 1 И Ос 1, а СЛЕ- довательно, и от частоты исходного сигнала, СДВИГаЯ ВтОРОй ИСХОДНЫЙ СИГНаЛ Овх 2 На установленный угол 3 и рассуждая аналогично, получают из второго сдвинутого сиг- З 04( )НаЛа Ос 2 = Овх 2 Е третий Оз и четвертый 04 дополнительные сигналы (фиг.1 б): 35 ОЗ = Ос 2+ Овх 2;04 = Ос 2 - Овх 2,(4) ДлЯ проиэвОльного момента вРемени 1, 40 соответствующего началу эталонного интервала Л 1, мгновенные значения дополнительных сигналов 01, 02, Оз и 04 определяются как 011 = Огп 1 з 1 п ю 1 с 021 = Огп 2 СОЗ ГГГ 1 1;031 = ОгпЗ З 1 П Оа С;041 = Огп 4 сов 032 ь(5) гДЕ Огп 1, Огп 2, ОгпЗ, Огп 4 - амплитУДы СООтвЕтственно первого, второго, третьего, четвертого дополнительных сигналов;в 1 и га - угловые частоты первого и второго сигналов,Мгновенные значения дополнительных сигналов для момента времени (1 + Л т), соответствующего концу эталонного интервала, определяюгся как(б) 012 = 011 сов гг 11 Л 1+021 Огп 1впж 1 Л 1;Огп 2022 = 021 СОЯ К 1 Л011 Огп 2вп ссг 1 Л ;гп 1032 = 031 СОЗ Са Л т+ - В 1 П СгГ 2 Л С;041 ОгпЗОгп 4 Оаг= 041 соз са Лс - впса Л 1,031 Огп 4Огпз(7)Лз первого и третьего уравнений (7) определяют зп а 1 Лс и э)п в 2 Л т и подставляют соответственно во второе и четвертое уравнения. После несложных преобразований получают 021 сов Ж 1 Л 1 -О гп 22(8) Уравнения (5), (б) разрешают относительно Огп 1, Огп 2, ОгпЗ Огпа:2 2 2, 2,г ОЬ ОЬ -ОЬ 012,Огп 11022 - 0212 021012 . 011022О гп 2012 - 011 2 031042 . 041032ОгпЗ042 - 041( 2 2 2 2заменяют их значениями из выражений(9) и разрешают относительно сов в 1 Л 1и сов гсг 2 Л 1: Выражения (5), (6) образуют систему из восьми уравнений. в которых неизвестными ЯвлЯЮтСЯ а 1, и 2 Огп 1, Огп 2, ОгпЗ, Огпа, гг) 1 Л , ггг 2 Лт. Решение этой системы относи- ТЕЛЬНО Гг 11 И Ь 2 ВЫПОЛНЯЮТ В СЛЕДУЮЩЕЙ ПО- следовательности,В ВЫРажЕНИЯХ (б) ЗаМЕНЯЮт Огп 1 ЗП В 1 1, Огп 2 СОЗ В 1 С, Огпз Зп Сгг 2 т, Огп 4 СОЗ В 2 С их значениями из уравнений (5)1774280 72 гз з,г гОгг Огз(О,г-О 1-ОзгОзз(Огг-гз) х=соЗйэ(ЛФ г г г г г О (О Озз) Ои(Огг Огз)г г г г у=соз г Ог Оз(Озг"Оз) О гОз(Оч Овз зг г г гК(Ог Оззз Озз( 4 г ззУчитывая, что и 1 = 2 л: 1 и Ф 2 = 212, , модуль разно( ти частотЛ 1 =11 - 12 определяется согласно выражению Л 1= ---- Д 1 ЛС - В 2 Лт ) = 2 лЬ (аггсозх - агссозу),Используя далее известную формулупреобразования разности двух обратныхтригонометрических функций агссозх - агссозу = з- агссоз(х у+ 5 10 15 того аналого-цифровых преобразователей 9, управляющие входы которых соединены с выходом управляемого генерАтора 10 импульсов, а выходы присоединены соответственно к информационным входам первого 01, третьего 63, пятого 65, седьмого 67 регистров памяти блока 12 памяти, Управлягощие входы упомянутых регистров через элемент 11 задержки подключены к выходу управляемого генератора 10 импульсов, а их выходы - к информационным входам второго 62, четвертого 04, шестого 66, восьмого 68 регистров памяти блока 12 памяти. Управляющие входы этих регистров присоединены к выходу управляемого генератора 10 импульсов, выходы первого 61, второго 62, третьего 63, четвертого 64, пятого 65, шестого 66, седьмого 67, восьмого 68 регистров памяти блока 12 памяти подключены к соответствующим входам блока 13 цифровой индикации.где знак "+" берется при ху, а знак " - " - при ху, получают окончательную формулу (1) для вычислен,гя разности частот Л 1 двух синусоидальн гх сигналов.К непосредственно используемым параметрам при вычислении разности частот по формуле(1) относятся мгновенные значения четырех дополнительных сигналов, измеренные однс временно в начале и в конце эталонного ин ервала времени,Гибридное аналого-цифровое устройство для реализации предложенного способа (фиг.З) содержит преобразователи 1, 2 напряжения, на в оды которых подаются соот- ВЕтСтВЕННО ВХОДНЫЕ НаПРЯжЕНИЯ Огзх 1 И Ох 2, фазовращатели 3, 4, сумматоры 5, 7, йычитатели 6, 8, четыре аналого-цифровых преобразователя 9, управляемый генератор 10 импульсов, элемент 11 задержки, блок 12 памяти, состоя,ций из восьми регистров 61- 68 памяти, и блок 13 цифровой индикации, включающий восемь элементов, каждый из которых представляет собой последовательно соединенные дешифратор и цифровой индикаторВыходы преобразователей 1 и 2 напряжения подключены соответственно к входам фазовращателей 3 и 4, причем выход фазовращателя 3 соединен с первыми входами сумматс р5 и вычитателя 6, на вторые входы которьх подается входное напряжение Овх 1, а в(ооД фазовРаЩателЯ 4 соеДинен с первыми входами сумматора 7 и вычитателя 8, на вторые входы которых подается входн(з напряжение Огзх 2. Выходы сумматора 5, в гчитателя 6, сумматора 7 и вычитателя 8шляются входами соответственно первоп, второго, трегьего и четвертройство работает следующим образом,25 Переменные напряжения Оех 1 и Овх 2,частоты которых Г 1 и 12, поступают соответственно на входы преобразователей 1 и 2напряжения. выполняющих также функциюгальванического разделителя цепей контро 30 лируемых напряжений и цепей устройства,и преобразуются в пропорциональные напряжения с заданными амплитуднымизначениями, Выходное напряжение преобразователя 1 подается на вход фазовраща 35 теля 3 и вторые входы сумматора 5 ивычитателя 6. На выходе фазовращателя 3получается напряжение Ос 1 такой же амплитуды, как и входное, но сдвинутое по отношению к нему на установленный угол,40 которое поступает на первые входы сумматора 5 и вычитателя б. Аналогично выходноенапряжение преобразователя 2 подается навход фазовращателя 4 и вторые входы сумматора 7 и вычитателя 8. На выходе фазов 45 ращателя 4 получается напряжение Ос 2,поступающее на первые входы сумматора 7и вычитателя 8 Выходные напряжения сум"матора 5 О 1, вычитателя б О 2, сумматора 7Оз, вычитателя 8 О 1 поступают на аналого 50 вые входы соответственно первого, второго,третьего, четвертого аналого-цифровыхпреобразователей 9, После запуска управляемый генератор 10 импульсов синтервалом Лт вырабатывает два после 55 довательных импульса, которые подаютсяна управляющие входы аналого-цифровыхпреобразователей 9, управляющие входывторого 62, четвертого 04, шестого 06, восьмого 68 регистров памяти блока 12 памяти,а также на вход элемента 11 задержки, 1774280 10При поступлении очередного импульса единовременно запускаются все четыре аналого-цифровых преобразователя, а также производится запись содержимого первого 61, третьего 63, пятого 65, седьмого 67 регистров соответственно во второй 62, четвертый 64, шестой 66, восьмой 68 регистры блока 12 памяти. После появления импульса на выходе элемента 11 задержки, к моменту которого заканчивается процесс аналого-цифрового преобразования, цифровые коды мгновенных значений напряжений 01. 02, Оз, 04 с выходов первого, второго, третьего и четвертого аналого-цифровых преобразователей записываются соответственно в первый 61, третий 63, пятый 65 и с.дьмой 67 регистры памяти.После поступления с интервалом Лт двух импульсов от управляемого генератора 10 импульсов в регистрах блока 12 памяти оказь 1 ваются записанными во втором 62, четвертом 64, шестом 66, восьмом 68 соответственно 011, 021, Оз 1, 041 - результаты первого измерения мгновенных значений напряжений 01, 02, Оз, 04, а в первом 61, третьем 63, пятом 65, седьмом 67 регистрах - соответственно 012, 022, Озг, Оа - результаты второго измерения мгновенных значений этих напряжений.Эти результаты с выходов всех регистров блока 12 памяти поступают на соответствующие входы блока 13 цифровой индикации, По результатам цифровой индикации мгновенных значений 011, 021, Оз 1, 041, 012, 022, Оз 2, 042 напряжений с использованием выражения (1) определяют разность частот контролируемых напряжений,Использование изобретения позволяет по сравнению с прототипом повысить точность определения частот двух синусоидальных сигналов и расширить функциональные возможности способа. Изобретение может быть использовано для построения быстродействующих измерительньух органов разности частот устройств релейной защиты и автоматики энергосистем и реализовано с помощью известных решающих элементов, выполненных на базе микроэлектронной техники, Формула изобретения Способ контроля разности частот двухсинусоидальных сигналов, основанный на одновременном измерении в начале и в кон це эталонного интервала времени мгновенных значений двух пар синусоидальных сигналов, сдвинутых по фазе в каждой паре на угол 7 г/2, о т л и ч а ю щ и й с я тем, что, с целью повышения точности и расширения 10 функциональных возможностей способа, изпервого и второго исходных сигналов путем сдвига последних в произвольную сторону без изменения амплитуд на установленные углы, ойределяемые допустимой погрешно стью и быстродействием измерения, получают соответственно первый и второй сдвинутые сигналы,. формируют первый и второй дополнительные сигналы соответственно как сумму и разность первых исход ного и сдвинутого сигналов, а также третийи четвертый дополнительные сигналы соответственно как сумму и разность вторых исходного и сдвинутого сигналов, фиксируют взятые через эталонный интервал времени 25 по два мгновенных значения каждого из четырех дополнительных сигналов, а разность частот Л 1 определяют согласно математическому выражению: 1сх=Яуху-х) Схсссхфх у+Ко-хц-уЧ,ЗЛИ2 2 2 2ГДЕ сх 22 21 2 П) 12 У 22 21 х2 2 2 2 2 21 д ( 2 я ) 11( 22 Д )2 2, 2 2Иц 2 ОЯО ОЗ ) ОУЗ О Усу )х 2 2 2 2 2 2Ц 32 31) 31 Ф 2 Н 30 35 40 011, 021, Оз 1, 041 - мгновенные значениясоответственно первого, второго, третьего, четвертого дополнительных сигналов в начале эталонного интервала времени;012, 022, 032, 042 - мгновенные значения 45 соответственно первого, второго, третьего,четвертого дополнительных сигналов в конце эталонного интервала времени;Ь т - эталонный интервал времени.1774280 иг, 1 Фиг. Редактор Т,Юрчиков Корректор П,Гереши ГКНТ СССР Производственно-издательский комбинат "Патент". г, Ужгород, л.Гага ин, 101 Заказ 3925 ВНИИПИ Госуд Составитель Ф.Романюк ехред М.Моргентал Тираж Подписное твенного комитета по изобретениям и открытиям 113035, Москва, Ж, Раушская наб 4/5
СмотретьЗаявка
4899389, 03.01.1991
БЕЛОРУССКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
РОМАНЮК ФЕДОР АЛЕКСЕЕВИЧ, РУМЯНЦЕВ ВЛАДИМИР ЮРЬЕВИЧ
МПК / Метки
МПК: G01R 23/00
Метки: двух, разности, сигналов, синусоидальных, частот
Опубликовано: 07.11.1992
Код ссылки
<a href="https://patents.su/6-1774280-sposob-kontrolya-raznosti-chastot-dvukh-sinusoidalnykh-signalov.html" target="_blank" rel="follow" title="База патентов СССР">Способ контроля разности частот двух синусоидальных сигналов</a>
Устройство для сравнения частот импульсных сигналов

Номер патента: 1751844
Опубликовано: 30.07.1992
Автор: Климов
МПК: H03K 5/26
Метки: импульсных, сигналов, сравнения, частот
...на прямом выходе этого триггера формируетсяфронт импульса 12 (фиг, 2 в), Импульс 13 свхода 2 проходит на первый выход ключа 7и сбрасывает триггер 5 в состояние "0", приэтом формируется срез импульса 12. Импульс 14 с входа 2 проходит на второй выходключа 7 и переключает триггер 4 в состояние "0". На прямом выходе триггера 4 формируется сигнал "0" (фиг. 2 г импульс 15),При этом на обоих входах элемента 8 имеются нулевые сигналы, и на его выходе и наЯ-входе триггера 10 формируется сигнал"1", который переключает триггер 10 в со 5 стояние "1", при этом навыходе 3 формируется фронт импульса 16 (фиг. 2 д), Наличиеимпульса 16 свидетельствует о том, что частота на входе 2 больше частоты на входе 1.Импульс 17 с входа 1 проходит на первый10...
Устройство для оценки отношения корреляционных моментов второго и первого порядков

Номер патента: 1244678
Опубликовано: 15.07.1986
МПК: G06G 7/19
Метки: второго, корреляционных, моментов, отношения, оценки, первого, порядков
...процессов х.) и у1 с 1 1,К - -Т1с 1 ь 1 ь- ЮОгде р - ноРмиРованная взаимокор.реляционная функция процессов.Целью изобретения является повышение точности устройства,Параметр К является самостоятельной характеристикой форм взаимокорреляционной функции р) . Кроме того,если у с) . -) и ) х с - и) йи, т . е . ее.оляется выходом линейного звена с импульсной характеристикой Ь(о), топодставляя, производя замену перемен.ных, можно показать, чтоМг Ь) Мо(Ь) Мг(х)К = +ЖМ,(Ь) ЙО) М,(х)где М (Ь) = и"Ь(ц)йгг, - моменты имипульсной характеристики;1;:М(х) =1К (т)ДФ - момент корре)оляционной функции Квходного проацесса х,Таким образом, имеется воэможностьоценивать параметр линейного звена,что весьма важно при диагностике, ресурсных испытаниях,...
Устройство для воспроизведения магнитной записи

Номер патента: 1094050
Опубликовано: 23.05.1984
Авторы: Догадов, Коган, Рейдес, Халилуллов
МПК: G11B 5/00
Метки: воспроизведения, записи, магнитной
...входами подсоединенных к выходу генератора, соединенных входами установки соответственно с инверсным и прямым выходами триггера и управляющими входами соответственно второго и первого блоков управления, входы установки в 1 и в О триггера подключены к выходам соответственно первого и второго блоков сравнения, а инверсный выход триггера - к управляющему входу формирователя кода.Это приводит к расширению диапазона компенсации временных искажений вследствие повышения быстродействия процесса обработки сигнала воспроизведения.На чертеже приведен один из возможных вариантов устройства для воспроизведения магнитной записи.Устройство содержит умножитель 1, подключенный входом через первый формирователь 2 импульсов к первой входной шине 3,...
Формирователь сигнала изображения
Номер патента: 1277427
Опубликовано: 15.12.1986
МПК: H04N 5/335
Метки: изображения, сигнала, формирователь
...на управляющиевходы первого и четвертого электронных ключей 7 и 15 подаются управляющие импульсы (меандры) с половиннойстрочной частотой 1/2 Г (фиг.2 л).На управляющие входы третьего и второго электронных ключей 12 и 18 подаются управляющие импульсы с половинной строчной частотой 1/2 Г(фиг, 2 м) с выхода инвертора 21.Поочередное считывание сигналовизображения с выходов блоков 8, 13,16, 19 памяти производят с увеличенной в два раза скоростью по сравнению со скоростью записи, т.е. сдвойной тактовой частотой 2 йВчетном периоде строчной разверткисначала считывают сигнал изображения с выхода второго блока 13 памятиния входного светового потока, с применением соответствующей светоделительной оптики, нескольких матричных ПЗС и...
Многоканальное устройство для контроля памяти

Номер патента: 1238164
Опубликовано: 15.06.1986
МПК: G11C 29/00
Метки: многоканальное, памяти
...и принятой туда изблока 17 по этому же адресу в первом обрашении к нему. Такие обращения и сравнения информации будут продолжаться до тех пор, пока в блоке 5 свертки по моду 55лю три не выработаются контрольные коды адреса и данных, После этого они поступают в блок 10 для сравнения с контрольными кодами, полученными из блока 17. В случае равенства этих кодов в блок 6 передается30 55 Формула изобретения сигнал, по которому в нем происходит выработка сигнала добавления единицы к содержимому счетчика 2, который поступает в него через элемент ИЛИ 12, Далее устройство переходит к выполнению аналогичной работы по следующему адресу.Аналогично происходит работа в других контрольных режимах.Во всех режимах работа каналов выполняется в пределах...
Предыдущий патент: Устройство для измерения кратковременной нестабильности периода
Следующий патент: Анализатор спектра
Случайный патент: Кормовая добавка для жвачных животных