Электрический соединитель с нулевым усилием стыковки
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки






Текст
КИЙ СОЕДИНИТЕЛЬ С СТЫКОВКИ ктроннои апния - упрощеостигается в радиоэ ь изобре л е ом соединител овки, содержа енин на одно илием стык в углублорого закряда плос ементы 2 реплены в кие пружи с устройс ом ОСУДАРСТВЕННЫЙ КОМИТЕТ СССРО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ(57) Изобретерическим соедиспользованопаратуре. Целние конструкцтем, что в элс нулевым усщем корпус 1,.из граней котпараллельныхконтактные эл ие относится к элект нителям и может быть сжатия, состоящим из двух параллельных оси корпуса 1 планок 3 и 4, установленных снаружи рядов контактов2 с возможностью возвратно-поступательного движения для воздействия напружинящие участки 22 контактов 2 исвязанных с механизмом привода, который содержит четырехзвенный шарнирнорычажный механизм, состоящий иэ шарнирно связанных рычагов - тяг 7-10 идва рычага-тяги 5 и 6, которые шарнирно соединены одними концами наоси 12, а другими концами шарнирносоединены осями 13 и 14 с концамипланок 3 и 4, другие концы которыхшарнирно соединены осями 15 и 16 сдвумя свободными шарнирами, образованными парами рычагов - тяг 7-10,Одна иэ осей шарнирно-рычажного механизма и общая ось 12 рычагов - тяг5 и 6 закреплены неподвижно вдольоси корпуса 1. Срабатывание приводаобеспечивается поворотом ручки 11,смещающей ось 18. 9 ил.Изобретение относится к электротехническим соединительным устройствам и может быть использовано в ра, диоэлектронной аппаратуре.Цель изобретения - упрощение конструкции,На фиг, 1 изображен предлагаемыйсоединитель, общий вид, на фиг, 2то же, вид сверху, на фиг, 3 - сечение А-А на фиг. 2 на фиг, 4 - планка, вариант исполнения; на фиг, 5элемент привода; на фиг, 6 - вид Бна фиг. 5; на фиг. 7 - элемент привода, вариант, на фиг. 8 - то же, вариант на фиг. 9 - то же, вариант.В корпусе 1 на одной из граней,например верхней, выполнено углубление, в котором размещены два рядаконтактных элементов 2 по и контактов в каждом ряду. Контактные элементы закреплены на некотором расстоянии один от другого и симметричноотносительно вертикальной плоскостиасимметрии, лежащей между рядами контактных элементов и проходящей, например, через продольную ось симметрии 0-0 корпуса.В этом же углублении в верхнейчасти корпуса 1 размещено устройствосжатия контактов, содержащее четырехзвенный шарнирный рычажный механизм,шарнирно соединенные рычаги и двепланки 3 и 4, оказывающие воздействиена контактные элементы, идентичныерычаги (тяги) 5 и 6, 7 и 8, 9 и 10,также выполненные в форме планок.Планки 3 и 4 выполнены из изоляционного материала и установлены снаружирядов контактов с возможностью равноудаленного от оси симметрии 0-0 иодновременного возвратно-поступательного движения для воздействия на пружинные участки контактов 2 по сопрягаемой линии или по сопрягаемой поверхности при соответствующей формеконтактной поверхности планки (непоказана) .Для обеспечения одновременноговоздействия на все контактные элементы ряда планки 3 и 4 имеют одинаковое сечение по всей длине, напримерпрямоугольное. Планка со ступенчатойсопрягаемой поверхностью (фиг. 4)обеспечивает приоритетное воздействие на некоторые контакты ряда, чтодает воэможность более раннего (позднего) подключения некоторых цепей,например цепей питания или др. цепей,Движение планок 3 и 4 обеспечивается с помощью шарнирного соединенияс тягами 5-10, кинематически соединенными с ручкой 11 управления, Тяги5-10 соединены попарно: 5 и 6, 7 и 8,9 и 10.Концы первой пары тяг 5 и 6 шарнирно соединены между собой на оси 10 12, жестко закрепленной на корпусе 1и лежащей в вертикальной плоскости,проходящей через ось симметрии 0-0.Вторые. концы тяг 5-6 шарнирно соединены в осях 13 и 14 с концами привод ных планок 3 и 4 соответственно.Другие концы планок 3 и 4 такжешарнирно при помощи осей 15 и 16 соединены двумя парами тяг 7 и 9, 8 и 10,образуют стороны четырехугольника, 20 например ромба. При этом большая диагональ ромба, проходящая через осишарниры 17 и 18,лежит в вертикальнойплоскости, проходящей через ось симметрии 0-0. Одна из вершин этой диагонали должна быть Закреплена неподвижно на корпусе, другая - подвижноотносительно него. В первом вариантеисполнения соединителя (фиг. 1 и 5)неподвижно закреплена на корпусе ось- ЗО шарнир 17, а ось-шарнир 18 подвижнаотносительно корпуса. В третьем варианте исполнения кинематической связи(фиг. 8) неподвижно закреплена накорпусе ось 18, а подвижно - ось 17.Неподвижные оси выполнены в видеоси-винта (не изображено), а подвижные оси, например, в виде пустотелыхзаклепок.Для перемещения оси 18 (фиг. 1-2) 40 вдоль оси симметрии 0-0 в корпусепредусмотрен паз 19 (фиг. 1, 2, 5,7), ось которого также лежит в вертикальной плоскости, проходящей черезось симметрии 0-0. Паз 19 открыт так 45 же в сторону оси ручки управления.На верхней грани корпуса выполнен также паз 20 для установки печатной платы, ось которого также лежитв вертикальной плоскости. Паз 20 открыт с торца конуса в сторону ручки11 управленик, что позволяет устанавливать печатную плату как сверху,так и с торца соединителя.Каждый контактный элемент 2 имеетпрямолинейный участок 21 для подсоединения внешних цепей и пружинящийучасток 22, расположенный под острымоуглом, например 15 , к участку 21.Контактные элементы установлены в3 1 ,корпусе так, что изгиб пружинящего участка обращен наружу, к приводной планке. Удлиненный участок 22 соеди нен под прямым углом с контактным участком, имеющим отогнутый хвостовик. Контакт с проводником печатной платы обеспечивается в месте изгиба хвостовика.Шаг размещения контактов 2 в ряду должен соответствовать шагу проводников на печатной плате или шагу контактов разъема.Выступающие стенки 23 корпуса предохраняют от повреждения пружинные участки контактов. Печатная плата обозначена позицией 24.Разработано три варианта кинематического соединения узла смещения контактов с ручкой управления элементом привода, обеспечивающих плавную регулировку контактного давления при этом в вариантах на фиг. 5 и 7 вращательное движение ручки 11 преоб 1 разовано в возвратно-поступательное перемещение подвижной оси 18. В варианте на фиг. 8-9 ручка 11 совершает поступательное движение под действием пружины.В первом варианте ось ручки 11 имеет резьбу, на этом участке оси 25 навернута гайка 26 (фиг. 5). Ось 25 размещена в отверстии 27, открытом с торца корпуса и соединенном пазом 19 с углублением в верхней части корпуса.Во всех вариантах (фиг. 5-7) ручка 11 фиксируется в определенном положении с помощью пружинного стопора 28. На торце корпуса нанесены деления шкалы, соответствующие определенному контактному давлению.Ось 25 ручки управления жестко связана с кулачком 29, имеющим профильный паз 30, в который входит ось 18 (фиг. 7).В варианте на фиг. 8 ось 25 ручки 11 заканчивается кулачком 31, имеющим поперечный паэ 32, в который входит ось 17, Ось 25 служит направляющей для пружины 33 сжатия упирающейся одним концом в кулачок 31, а другим - в гайку 34, ввернутую в корпус 1 с возможностью перемещения ее вдоль оси 25 для изменения деформации пружины 33, работающей на сжатие.Для размещения гайки 34 в корпусе выполнено отверстие 35, открытое с торца и переходящее в отверстие 27,354303при этом на стенке отверстия 27 выполнена резьба (фиг. 8) для гайки 34,Стопор 36 обеспечивает фиксацию кулачка 31 на время установки платыв соединитель (фиг. 9), который закреплен жестко в корпусе.В кулачке выполнен также продольный паз 37 (фиг. 8, 9), предназначенный для взаимодействия со стопором 36.Работает электрический соединитель с нулевым усилием стыковки следующим образом.В исходном положении контакты сое 15 динителя нормально разомкнуты. В этомположении флажок 11 не перекрываетпаз 20 и не препятствует установкев него печатной платы вдоль паза доупора.При повороте ручки 11 по часовойстрелке до положения, соответствующего риске шкалы "1" (фиг, 1, 6) гайка 26 смещается вместе с жестко соединенной с ней осью 18, что вызывает 25 плоскопараллельное перемещение планок 3 и 4 навстречу (фиг. 5). Приэтом пружинящие участки 22 смещаютсянавстречу, а хвостовики сопрягаютсяс ответными контактами на печатной ЗО плате (или в разъеме). В варианте на фиг. 7 при повороте ручки 11 ось 18 взаимодействуетс профильным пазом 30 кулачка 29 иперемещается в сторону ручки. Это вызывает замыкание контактов соединителя с печатными проводниками печатной платы вследствие описанного движения приводных планок 3 и 4.4 О В варианте на фиг. 8 и 9 для установки печатной платы ручку 11 следует оттянуть на себя. При этом кулачок 31 перемещается влево за стопор 36 (фиг, 9), также влево пере мещается ось 17, планки 3 и 4 расходятся, освобождая пружинящие участкиконтактов для установки платы.После установки платы ручку 11поворачивают вправо до совпаденияпаза 37 со стопором 36, после чегопод действием пружины 33 кулачок 31вместе с ручкой 11 возвращается в исходное положение.При необходимости увеличения кон тактного давления гайка 34 вворачивается в корпус 1 и поджимает пружиону 33.Положительный эффект достигаетсяупрощением конструкции.1354303 оставитель Ю.Киселевехред Л.Сердюкова едактор С.Патрушева Корректор С.Шекмар Заказ 570 Тираж 625 ВНИИПИ Государственного по делам изобретений 113035, Москва, Ж, Р
СмотретьЗаявка
3748863, 06.06.1984
ПРЕДПРИЯТИЕ ПЯ В-8791
АДЛЕР МАКС ЦОДИКОВИЧ, КЛИГМАН ВАЛЕРИЙ АБРАМОВИЧ, КОРНЕЙЧУК АЛЕКСАНДР СЕРГЕЕВИЧ
МПК / Метки
МПК: H01R 13/62
Метки: нулевым, соединитель, стыковки, усилием, электрический
Опубликовано: 23.11.1987
Код ссылки
<a href="https://patents.su/6-1354303-ehlektricheskijj-soedinitel-s-nulevym-usiliem-stykovki.html" target="_blank" rel="follow" title="База патентов СССР">Электрический соединитель с нулевым усилием стыковки</a>
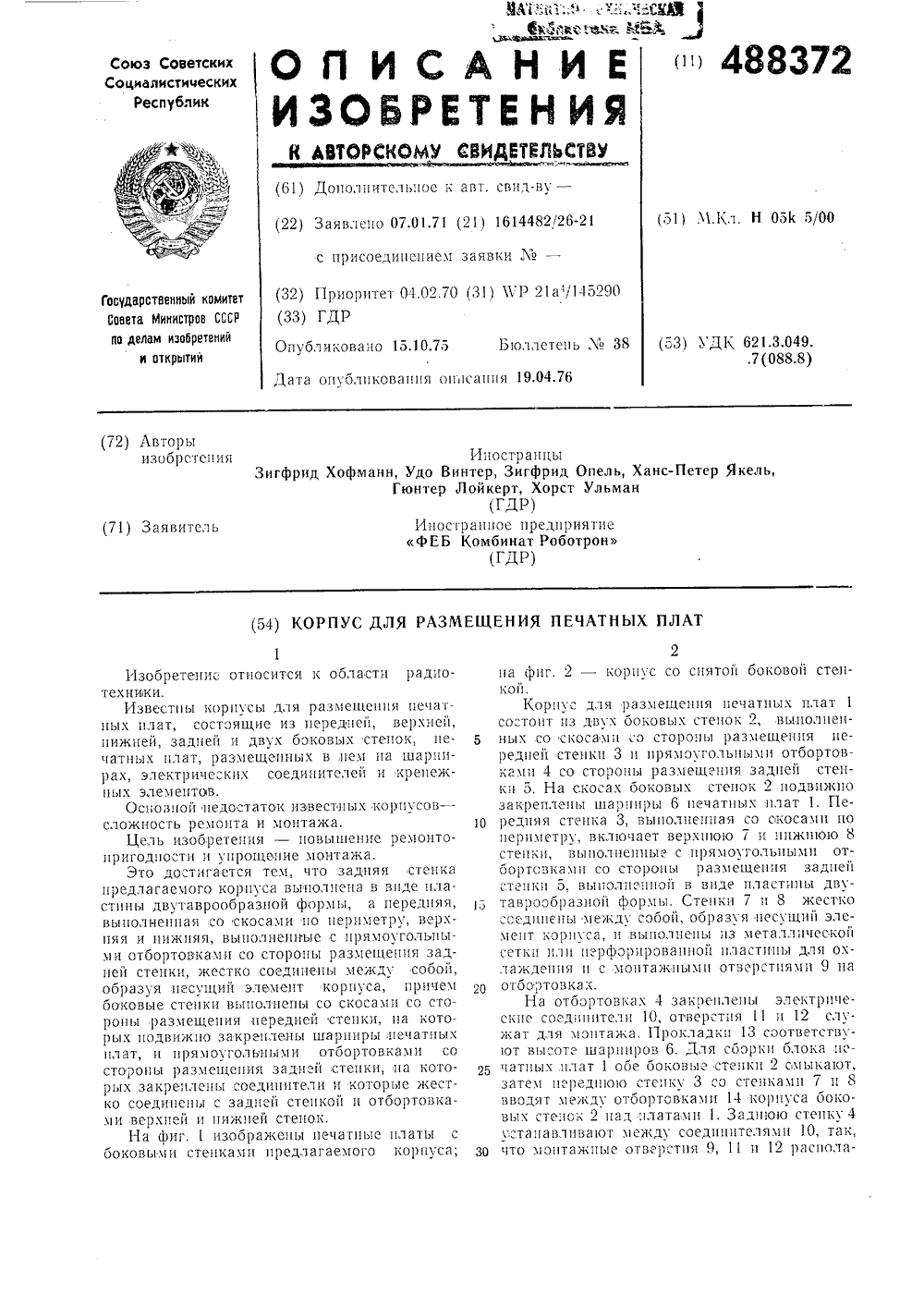
Корпус для размещения печатных плат
Номер патента: 488372
Опубликовано: 15.10.1975
Авторы: Гюнтер, Зигфрид, Удо, Ханс-Петер, Хорст
МПК: H05K 5/00
Метки: корпус, печатных, плат, размещения
...плат, состоящие из передней, верхнец, нижней, задней и двух боковых стенок, печатных 1 пат, размещенных в нем на шарнирах, электрических соединителей и крепежных элементов,Основной недостаток известных корпусов - сложность ремонта и монтажа.Цель изобретения - повышение ремонтопригодпости и упрощение монтажа,Это достигается тем, что задняя стенка предлагаемого корпуса выполнена в виде пластины двутаврообразной формы, а передняя, выполненная со скосами по периметру, верхняя и нижняя, выполненные с прямоугольными отбортовками со стороны размещения задней стенки, жестко соединены между собой, образуя несущий элемент корпуса, причем боковые стенки выполнены со скосами со стороны размещения передней стенки, на которых подвижно закреплены...
Разъем для печатных плат

Номер патента: 695593
Опубликовано: 30.10.1979
Автор: Франсуа
МПК: H05K 1/04
...без всякого усйлия между коитакпо.спирали) и деформируется между кон ными элемейтами и дорожками 8, Продолцами 4 и 4.жая поворачивать стержень 7 в том жеСтержень 7 выполнен из изоляцион-йаправлении, из-аа разной гибкости межного материала, на его цилиндрической ду частями 12 и 13 часть 12 продолжаетповерхности сделаны чередующиеся ради- перемещаться, заставляя часть 4,. акальные прорези 6, расположенные на уров- тивной зоны скользить вдоль токопровоне кажюго контактного элемента, конец.,. дящей дорожки 8, тогда как часть 44 которого вставляется в эту прорезь. подвергается более заметной деормации./Стержни 7 связаны с рычагами управле- Отсюда следует одновременное скольжения (на чертежах условно не показаны).ние точки Я на...
Разъем для печатных плат

Номер патента: 294270
Опубликовано: 01.01.1971
Авторы: Галиновский, Дзюбак
МПК: H05K 3/36
...этого в предлагаемом разъеме изоляционное основание снабжено двумя параллельно установленными и соединенными между собой общим приводным механизмом ку.лачковыми валами, на кулачки которых опираются контактные пружины разъема,На чертеке приведен вид разъема в продольном сечении (с приподнятыми контактными пружинами),Корпус 1 разъема снабжен нми, в которые входит плата 2 спечатным монтаком. На корпус 2изоляционные колодки 3 с контактными пру.жинами 4, опирающимися на кулачковые валы 5 из изоляционного материала и нмеющнмн общий приводной механизм, Кулачковые5 валы поворачиваются вокруг оси на опорах.Перед вставкой печатной платы 2 в разъемповоротом кулачковых валов 5 приподнимаютОнтактныс пр кипы 4. После встави неатной платы в...
Устройство для закрепления печатных плат

Номер патента: 577707
Опубликовано: 25.10.1977
Автор: Нефедов
МПК: H05K 3/34
Метки: закрепления, печатных, плат
...А-А нафиг. 1,Описываемое устройство содержит 25основание 1, радиально расположенныев нем держатель 2, габаритное кольцо 3, корпус 4, неподвижный упор 5.Внутри корпуса 4 на двух осях 6 установлен подвижный подпружиненный упор 7. 80 При отсутствии платы 8 с помощью пружины 9 выдерживается минимальное расстояние между упорами 5 и 7, в ко" торых выполнены Ч -образные пазы. На оси 10 установлен двуплечий рычаг 11, который через тягу 12 связывает упор 7 с толкателем 13.Устройство работает следующим Стбрдзом.плата 8 вручную перемещается одной из сторон по нижним поверхностям корпуса 4 держателя 2, встречаеЪф Ч -образный паэ упора 7 и перемещается далЫМ вместе с ним, преодолевая действие пружины 9, до достижения расстояния ежду упорами,...
Вихретоковый преобразователь для контроля печатных плат

Номер патента: 741140
Опубликовано: 15.06.1980
Авторы: Данилюк, Дергунов, Еремин, Маклярский, Соколов
МПК: G01N 27/86
Метки: вихретоковый, печатных, плат
...и металлиэированным отверстием в плате,На фиг. 1 изображен предлагаемый преобразователь, разрез; на фиг. 2 - измерительная часть преобразователя, разрез; на фиг. 3 даны примеры установки преобразователя в сквозные отверстия печатной платы разных диаметров. 4Наибольший радиаьч. цый зазор между ступенью преобразователя и металлизированным отверстием в плате равен 0,15 мм, наименьший 0,01 мм. Из этого расчета размеры платы выбраны следующими;псцгде Н 1 -высота-ой ступени преобразователя;) - наибольшая толщина контролируМОемой платы с металлиэацие 33 - наружный диаметр обмотки -ойступени преобразователяд 1 - диаметр металлизированного отверстия печатной платы; Д - наибольший радиальный зазор .ыюмежду ступенью преобразователя и...
Предыдущий патент: Разъем с устройством для подсоединения жгута
Следующий патент: Самоцентрирующийся электрический соединитель
Случайный патент: Лопасть смесителя