Система управления вибростендом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
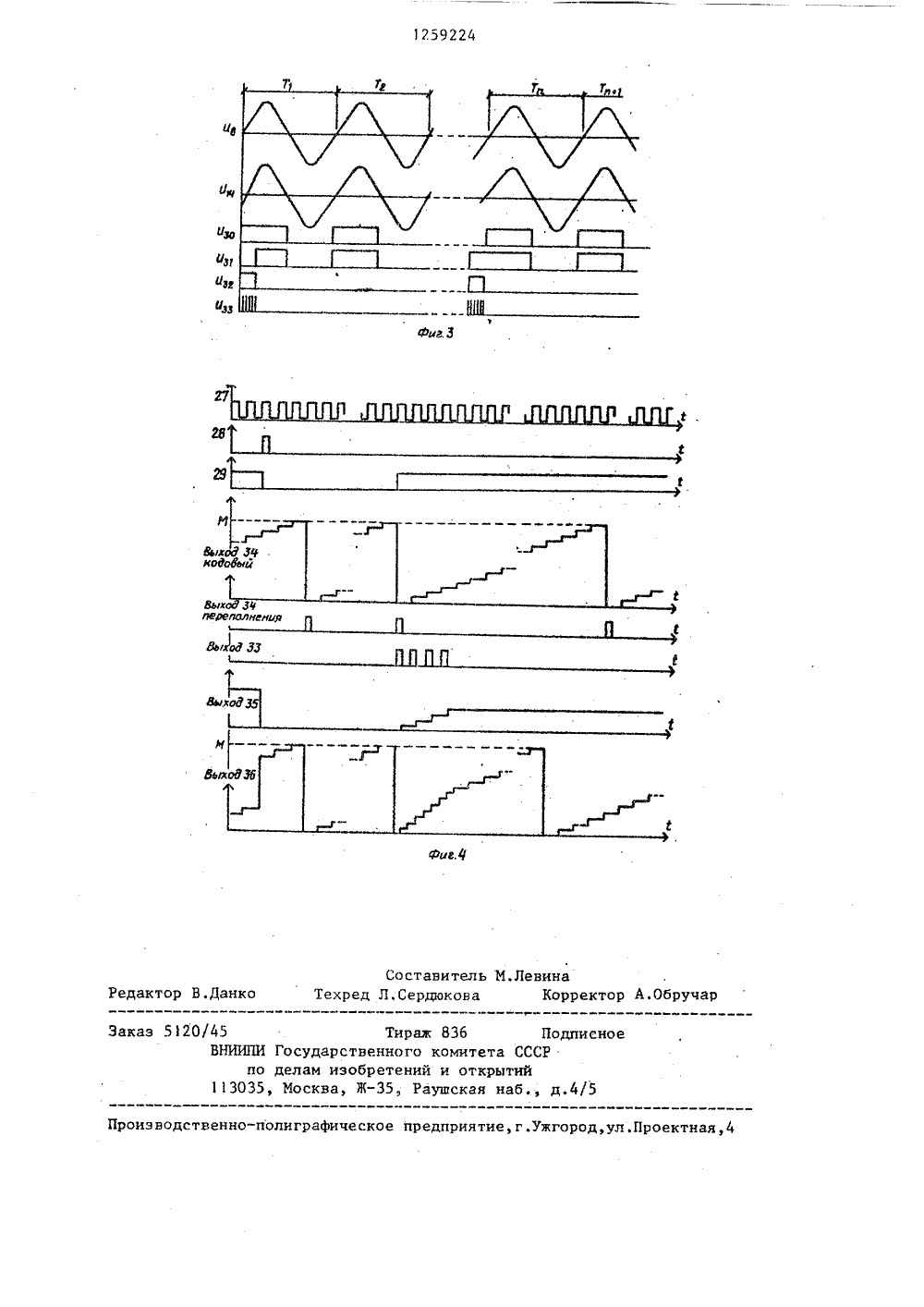
СООЭ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИН 24 В 14 С 05 П 19/О ГОСУД ПО ДЕ к ИСАНИЕ ИЗОБРЕТЕН е бютруктор Коньков 88.8)идетельство05 В 19(02,ССС 198 НЦОМ аст осх ч ВЕННЫЙ КОМИТЕТ СССРИЭОБРЕТЕНИЙ И ОТНРЫТИЙ(54) СИСТЕМА УПРАВЛЕНИЯ ВИБРОСТ (57) Изобретение относится к об автоматического регулирования и жет быть применено для точного произведения вибраций, задаваемь генератором, на вибростенде. Цел изобретения - повьппение точност гулирования путем коррекции фор колебаний вибростенда на высоки тотах. Система управления вибростендом содержит датчик вибраций, двапредварительных усилителя, усилительобратной связи, усилитель мощности,вибростенд, алгебраический сумматор,усилитель с регулируемым коэффициентом усиления, задатчик вибраций дваблока управления усилителем, генератор импульсов, источник регулируемого опорного напряжения, блок памятии фазоуправляющий блок. Фазоуправля"ющий блок содержит нуль-орган, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ, элемент И, реверсивный счетчик, сумматор, суммирующий счетчик и сдвиговый регистр.Введение фазоуправляющего блока иблока памяти позволяет осуществлятьрегулировку режима возбуждения с исправлением формы колебаний стенданезависимо от величины их фазовойзадержки. 1 з.п.ф-лы, 4 ил.Изобретение относится к областиавтоматического регулирования, можетбыть применено для точного воспроизведения вибраций., задаваемых генератором, на вибростенде и является дополнительным к авт.св. Р 1117588.Цель изобретения - повышение точности регулирования путем коррекцииформы колебаний вибростенда на высоких частотах. ОНа фиг.1 представлена функциональная схема системы; на фиг.2 - структура фазоуправляющего блока; нафиг,З и 4 - эпюры работы элементовфазоуправляющего блока. 15Система управления вибростендомсодержит датчик 1 вибраций, первыйпредварительный усилитель 2, усилитель 3 обратной связи, усилитель 4мощности, вибростенд 5, алгебраический сумматор б, усилитель 7 с регулируемым коэффициентом усиления,задатчик 8 вибраций, первый блок 9управления усилением, генератор 10импульсов, второй предварительныйусилитель 11, второй блок 12 управления усилением, источник 13 регулируемого опорного напряжения, блок 14 памяти, фазоуправляющий блок 15, Задатчик 8 вибраций состоит иэ постоянного запоминающего устройства 16 значений функции з 3.па ПЗУ), цифроаналогового преобразователя 17 (ЦАП),фильтра 18 нижних частот (ФНЧ). Блок14 памяти содержит аналого-цифровойпреобразователь 19 (АЦП), оперативное запоминающее устройство 20 (ОЗУ),цифроаналоговый преобразователь 21и фильтр 22 нижних частот. Фазоуправляющий блок 15 имеет сигнальные 40входы 23 и 24 - первый и второй соответственно, числовые выходы 25 и26 - первый и второй соответственно,импульсный вход 27, синхровход 28,потенциальный выход 29, а также нульорганы 30 и 31, элементы ИСКЛЮЧАЮЩЕЕИЛИ 32, И 33, суммирующий счетчик34, реверсивный счетчик 35, сумматор36, сдвиговый двухраэрядный регистр37 с подключенной к его входу последовательного занесения шиной 38 единичного потенциала. Сигнал на импульсный вход 27 поступает с тактовогогенератора 39,Устройство работает следующим образом.На вход 27 в фазоуправляющий блок5 подаются с тактового генератора 39 импульсы с частотой Е, пропорциональной частоте Е возбуждения стенда. Частота Е,. определяется иэ соотношения Етн =И Е, где И - количество точек на период сигнала, равное объему суммирующего счетчика 34 (весу разряда переполнения). Такой же объем Б имеют счетчик 35 и каждое из запоминающих устройств: ПЗУ 16 и ОЗУ 20. Импульсы с шины 27 тактируют счетчик 34, вырабатывающий последовательность натуральных чисел в виде непрерывно повторяющегося ряда значений от О до М, С первого числового выхода 25 блока 5 эти числа передаются в эадатчик 8 вибрации на адресный вход ПЗУ 16, ячейки которого содержат отсчеты функции синуса. Номер ячейки пропорционален фазе отсчета, определяемой с дискретностью 23/И. Поэтому время прохождения чисел одного ряда по адресным шинам ПЗУ 16 соответствует одному периоду гармонической функции, формируемой на его выходе в виде потока кодов и преобразуемой в электрическое колебание элементами ЦАП 17 и ФНЧ 18.С выхода эадатчика 8 вибрации гармонический сигнал определенной амплитуды А принимается на вход предварительного усилителя 11, который увеличивает амплитуду до значения 2 А. Усиленный сигнал подводится к прямому входу алгебраического сумматора 6, На инверсный вход алгебраического сумматора 6 от датчика 1 через предварительный усилитель 2, регулируемый усилитель 3 обратной связи я блока 14 памяти поступает сигнал,равный по амплитуде сигналу задатчика 8. Это равенство поддерживается первым блоком 9 управления усилением, который сравнивает подводимые к нему сигналы задатчика 8 и усилители 3, приводя амплитуду последнего к величине А. Блок 9 управления усилением реализует импульсно-астатическое управление, используя для этого, как и в известном устройстве, периодические сигналы в виде пилообразного напряжения от генератора О импульсов.Аналогичным образом второй блок 12 управления усилением, сравнивая сигналы предварительного усилителя 2 и источника 13 опорного напряжения, поддерживает уровень возбуждения вибростенда 5 (через усилитель 4 мощ 3 1259ности) таким, чтобы амплитуда вибраций, измеряемая датчиком 1, равнялась заданной с помощью источника 3.Как бы ни менялся уровень возбуждения стенда 5 и, следовательно, выходное напряжение датчика 1, амплитуда сигнала на входах блоков 9 и 14 остается неизменной и при неизменной амплитуде сигнала задатчика 8 вибрации,которые отличаются лишь формой и фазой. 10Для корректировки искажений формы коле -баний вибростала выходной сигнал усилителя 3 обратной связи необходимозаписать в блок 14 памяти и затемсчитывать из него синфазно с сигналом задатчика 8. Чтобы запомнить сигнал, на синхровхад 28 фазоуправляющего блока 15 подается импульс, абнуляющий выходы сдвигавого регистра37, а следовательно, и потенциальный 20выход 29 блока 15. Сигнал "0", передаваемый по проводу с выхода 29 науправляющий вход блока 14 памяти,задает ОЗУ 20 режим записи, ВыходыОЗУ 20 отключаются, и на инвертирующем входе алгебраического сумматора6 устанавливается нулевой потенциал, Сумматор 6 пропускает на вход возбуждения стенда образцовый сигнал задатчика 8 вибраций, а установленный З 0 в нулевое состояние реверсивный счетчик 35 обеспечивает ОЗУ 20 одинаковый с ПЗУ 16 адресный режим, поскольку сумматор 36 вынужден повторять навтором числовом выходе 26 коды перва- зго числового выхода 25, Запоминаемыйаналоговый сигнал дискретизируется, преобразуется с помощью АЦП 19 в поток двоичных кодов и записывается в ячейку ОЗУ 20 с тактовой частотой 40 суммирующего счетчика 34 и по тем же адресам, которые он формирует для ПЗУ 16.Наличие двух разрядов сдвиговаго регистра 37 обеспечивает полную запись сигнала в память (т.е. его значений за период) независимо от того, в какой момент времени на входе 28блока 15 появится импульс синхронизации, 50Действительно, регистр 37 тактируется импульсами переполнения счетчика 34, занося в свои разряды сигнал "1", передаваемый по шине 38. На потенциальном выходе 29 блока 15сигнал "1" появится после второго переполнения счетчика 34, который к этому моменту,отформирует всю после 224 4давательность адресов ОКи обратится к каждой из ячеек ОЗУ 20 для записи в нее кода АЦП 19. С установлением единичага потенциала на выходе 29 ОЗУ 20 перейдет в режим считывания записанного сигнала, который преобразуется в аналЬговый электрический сигнал с помощью ЦАП 21 и ФНЧ 22 и подается на инвертирующий вход сумматора 6 и на вход 24 блока 15. На вход 23 блока 15 поступает сигнал задатчика 8 вибраций. Нуль-аргань 30 и 31 выделяют знаки сигналов: положительной палуцалне соответствует единичный сигнал на выходе нуль- органа, отрицательной палувалне - нулевой сигнал (эпюры И, И Ио, Из) .Если сигналы на шинах 23 и 24 синфазны, та выходные сигналы нуль-органов 30 и 31 одинаковы па значению, и на вь 1 ходе элемента ИСЮПОЧА 1 ОЩЕЕ ИЛИ 32 удерживается "0", Нулевой потенциал запирает элемент И 33, не давая тем самым измениться коду реверсивного счетчика 35. Если фазы напряжения задатчика 8 и блока 4 не совпадут, та на выходе элемента ИСКХПОЧА 1 ОЩЕЕ ИЛТИ 32 появится единичный сигнал, длительностью пропорциональный .разности фаз (как эта показано, например, на эпюре И;), и тогда элемент И 33 пропустит на счетный вход реверсивного счетчика 35 такое количество импульсов, которое скомпенсирует фазовый сдвиг с точностью да величины кванта (эпюра ). Устройство сработает следующим образом: счетчик 35 выдаст прямой кад суммы импульсов, если напряжение И окажется запаздывающим па отношениюк И, или инверсный кад суммы, еслиИ,. будет опережать И, так как в первом случае рабата счетчика зависитат нуль-органа 30, который управляетсуммированием, а ва втором случаеат нуль-аргана 31, задающего счетчику режим вычитания. Сумматор 36 изменит адреса ОЗУ 20, соответственно увеличив или уменьшив их на величинукода счетчика 35, и тем самым устранит фазовое различие между напряжениями И 4 и И.Алгебраический сумматор 6 вырабатывает разность напряжений Б =Ц - -0 =20 - Б 4, где 11 - образцовыйгармонический сигнал, равный А з 1.па. Если вибростенд 5 не искажает форму5 12колебаний стола, то Б =А з 1 п, итогда Ц = 2 Азпг.-Аз 1 ны=Аэхпй.Если искажения имеются, то, представляя Ц =Аз 1 пЫС- х(С), где- искажающая функция, получимЦ =2 Аз 3.пас-(Аз 1 пй: - сс=- Ая пЯ + гОчевидно, что возбуждающее воздействие, пропорциональное Б, окажется искаженным в такой же степени,но с другим знаком, что приведет квыравниванию колебаний вибростола поформе образцового сигнала,Для изменения частоты Г возбуждения стенда 5 достаточно изменить частоту Йт тактовых импульсов на входе27 устройства, а чтобы исправить форму колебаний вибростола на новой частоте, нужно пропустить по шине 28очередной синхроимпульс, 20Таким образом, предложенная система осуществляет регулировку режимавозбуждения с исправлением формы колебаний стенда независимо от величины их фазовой задержки. 25 59224Ьвыходом блока памяти и вторым инвертирующим входом алгебраического сумматора, первый числовой выход фаэоуправляющего блока связан с входом за датчика вибраций, а второй числовойвыход - с адресным входом блока памяти, управляющий вход которого соеди.нен с потенциальным выходом фазоуправляющего блока,10 1. Система управлеия вибростендом по авт,св. 11- 1117588, о т л и ч а ю щ а я с я тем, что, с целью повышения точности регулирования путем коррекции формы колебаний вибростенда на высоких частотах, в нее дополнительно введены блок памяти, фа 35 зоуправляющий блок и генератор тактовых импульсов, причем импульсные входы блока памяти и фазоуправляюшего блока подключены к выходу генератора тактовых импульсов, синхровход фазоуправляющего блока соединен с .шиной нулевого потенциала, первый сигнальный вход фазоуправляющего блока соединен с выходом задатчика вибраций, а второй сигнальный вход - с Формула из о бр е тения 2. Система по п.1, о т л и ч а ющ а я с я тем, что в ней фазоуправляющий блок содержит последовательна соединенные первый нуль-орган,элемент ИСКЛЮЧАЮЩЕЕ ИЛИ, элемент И,реверсивный счетчик, сумматор, выходкоторого является вторым числовым выходом фазоуправляющего блока, второй нуль-орган и последовательно соединенные суммируюп;ий счетчик и сдвиговый регистр, выход которого соединен с вторым входом реверсивногосчетчика, и также является потенциальным выходом фазоуправляющего блока, второй установочный вход сдвигового регистра соединен с шиной единичного потенциала, а третий входявляется входом установки в 0 сдвигового регистра и синхровходом фазоуправляющего блока, входы первого ивторого нуль-органов являются соответственно первым и вторым сигнальными входами фазоуправляющего блока,выход второго нуль-органа соединен свторым входом элемента ИСКЛЮЧАЮЩЕЕИЛИ и с вторым входом реверсивногосчетчика, с четвертым входом которого связан выход первого нуль-органа,второй выход суммирующего счетчикатакже подключен к второму входу сумматора и является первым числовымвыходом фазоуправляющего блока, импульсный вход которого соединен свторым входом элемента И и с входомсуммирующего счетчика, 1259224,ул.Проектная Тираж 836 НИИПИ Государственного коми о делам изобретений и о 5, Москва, Ж, Раушск
СмотретьЗаявка
3758691, 25.06.1984
СПЕЦИАЛЬНОЕ КОНСТРУКТОРСКОЕ БЮРО "ВИБРОПРИБОР"
ГУСЕВ ВЛАДИМИР ДМИТРИЕВИЧ, КОНЬКОВА ИРИНА КОНСТАНТИНОВНА, ПРОХОРОВ ИГОРЬ АЛЕКСЕЕВИЧ
МПК / Метки
МПК: G05D 19/02
Метки: вибростендом
Опубликовано: 23.09.1986
Код ссылки
<a href="https://patents.su/6-1259224-sistema-upravleniya-vibrostendom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления вибростендом</a>
Устройство для обмена информацией

Номер патента: 1059561
Опубликовано: 07.12.1983
Авторы: Балакерская, Иващенко, Круглова, Онищенко, Петрушевская, Тресоруков
МПК: G06F 3/04
Метки: информацией, обмена
...- алгоритмвыдачи в ЭВИ ведущую слова данных.Устройство (фиг. 1) содержитблок 1 сопряжения, группу регистров 2 управляющих слов ведомых машин,регистр 3 управляющего слова ведущей машины, регистр 4 данных, регистр 5 инструкций, блок 6 приоритетамультиплексор 7, блок 8 оперативнойпамяти, блок 9 адресации, блок 10микропрограммной памяти, регистр 11адреса оперативной памяти, шины 12группы входов-выходов данных устроЯства, шины 13 группы управляющихвходов-выходов устройства, шины 14группы входов признаков режимов работы устройства, шина 15 группы входов запросов от абонентов, шины 16входа и выхода данных абонентовустройства, шина 17 группы выходовзапроса блока 1, шины 18 группы информационных выходов блока 1, шина 19 первого информационного...
Устройство управления загрузкой микропрограмм
Номер патента: 1119019
Опубликовано: 15.10.1984
Авторы: Вайзман, Ермолович, Ковалев
МПК: G06F 13/00
Метки: загрузкой, микропрограмм
...памятью сигнал, по которому блок27 11 13 управления памятью наращивает содержимое счетчика 11. адреса памяти. Когда содержимое блока памяти 10 передано в процессор, счетчик 11 адреса памяти вырабатывает сигнал переноса, поступающий на вход 115 блока, При этом триггер 105 сбрасывается и блок 14 связи с процессором устанавливается в исходное состояние.Блок 8 управления, движением головки (фиг.б) работает следующим образом. На вход 121 блока поступает адрес дорожки из регистра 3. На вход 22 блока поступает адрес дорожки из счетчика 7 адреса дорожки. Схема сравнения 120 производит сравнение этих адресов и выдает один из трех сигнапов: "Равно", "Болыпе", "Иеньше". В случае равенства адресов единичный сигнал с выхода схемы сравнения 120...
Вибрационное устройство для уплотнения бетонной смеси

Номер патента: 1217670
Опубликовано: 15.03.1986
Авторы: Гольденберг, Пыльнев
Метки: бетонной, вибрационное, смеси, уплотнения
...14 амплитуды вйбрации, на выходе элемента 13 сравнения возникает сигнал разности, который через блок 12 управления ам" плитудой вибрации воздействует на трехфазный выпрямитель 9, Напряжение на выходе выпрямителя изменяется в сторону восстановления заданной амплитуды вибрации.Стабилизация амплитуды предотвра щает возникновение больших ускорений, приводящих к отрыву бетонной смеси от рабочего органа, и выход отдельных элементов (например, упругих) на нелинейные участки работы. Переход отдельных элементов на нелиней.ные участки работы приводит к возникновению сигнала, являющегося помехой при контроле степени уплотнения бетонной смеси.Для контроля степени уплотнения35 бетонной смеси используются эффекты, происходящие при работе...
Процессор для обработки массивов данных
Номер патента: 1381532
Опубликовано: 15.03.1988
Авторы: Байда, Кривоносов, Супрун, Тимонькин, Ткаченко, Харченко
МПК: G06F 15/00
Метки: данных, массивов, процессор
...выходом блока хранения условий и блокировки.3. Процессор по п. 1, отличающийся тем, что блок анализа содержит мультиплексор, первый и второй сумматоры по модулю два, элемент И-НЕ, причем первый, второй, третий и четвертый информационные входы блока анализа соединены соответственно с первым информационным входом мультиплексора, первыми входами первого и второго сумматоров по модулю два и первым входом элемента И-НЕ, выход которого является первым информационным выходом блока анализа, вход знака результата блока анализа соединен с вторыми входами второго и первого сумматоров по модулю два, выход которого соединен с вторым входом элемента И-НЕ и вторым информационным входом мультиплексора, выход второго сумматора по модулю два, шина...
Устройство для сжатия цветовых сигналов телевизионных изображений

Номер патента: 1515400
Опубликовано: 15.10.1989
Авторы: Королев, Огарок, Петухов, Сосновский
Метки: изображений, сжатия, сигналов, телевизионных, цветовых
...поступают раньшетактовых импульсов с выхода блока 6управления на тактовый вход первогоблока 7 сравнения. Таким образом, 151540010 15 20 25 30 35 40 45 50 55 совпадение кода текущего адреса с кодом максимального адреса произойдет после считывания иэ блока 12 памяти последней инструкции данного кода. Результат совпадения кодов текущего и максимального адресов в виде единичного импульса с выхода второго блока 11 сравнения поступит на вход третьего регистра 10, обнулив его, и одновременно - на вход блока 6 управления. Этим будет прекращена выдача тактовыхи управляющих импульсов на блоки устройства. Таким образом, устройство из режима считывания информации в канал переходит в режим ожидания поступления кадрового синхроимпульса следующего...
Предыдущий патент: Система регулирования давления жидкости при наливе емкостей
Следующий патент: Устройство для контроля и регулирования температуры
Случайный патент: Устройство для выравнивания и наведения