Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
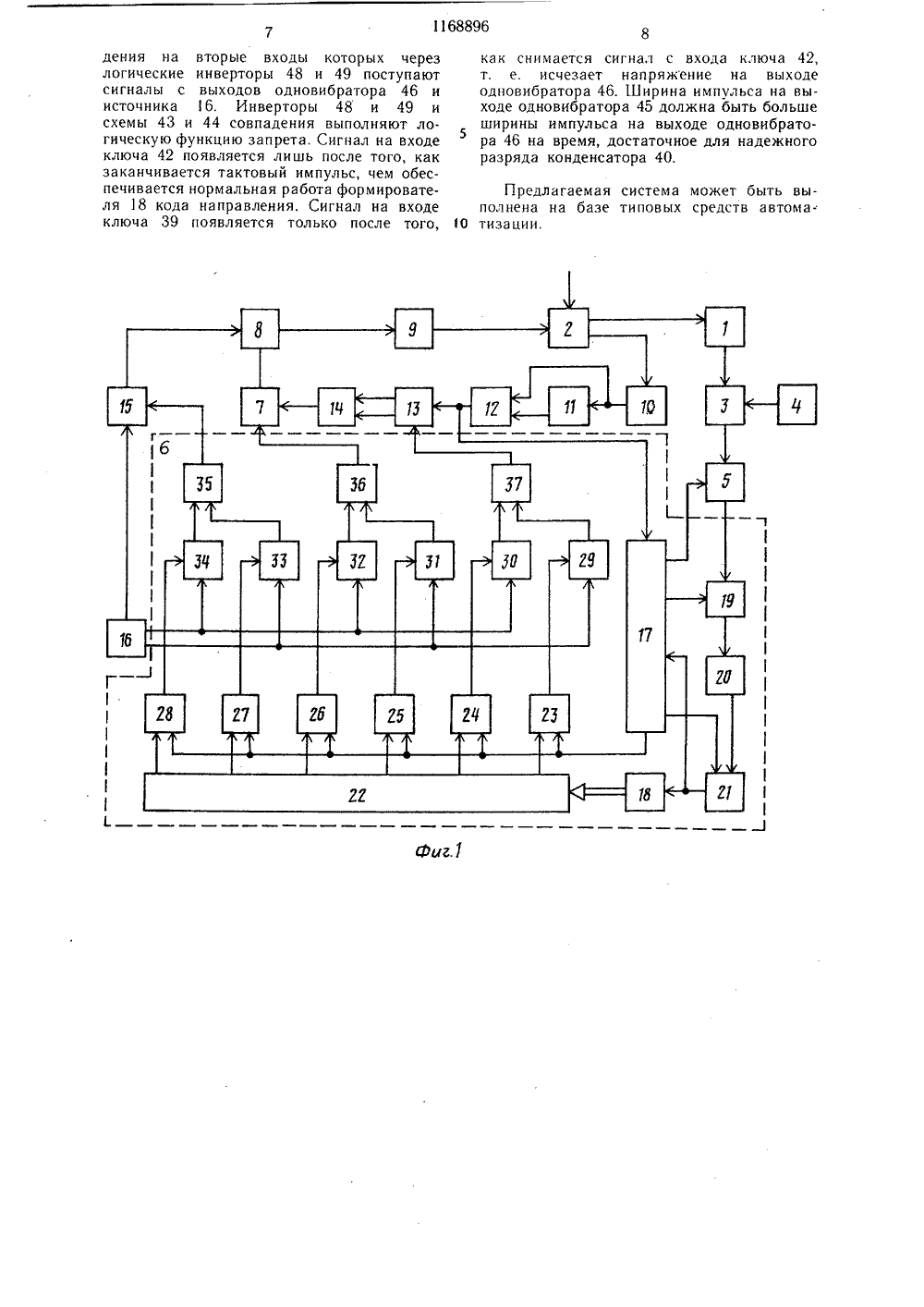
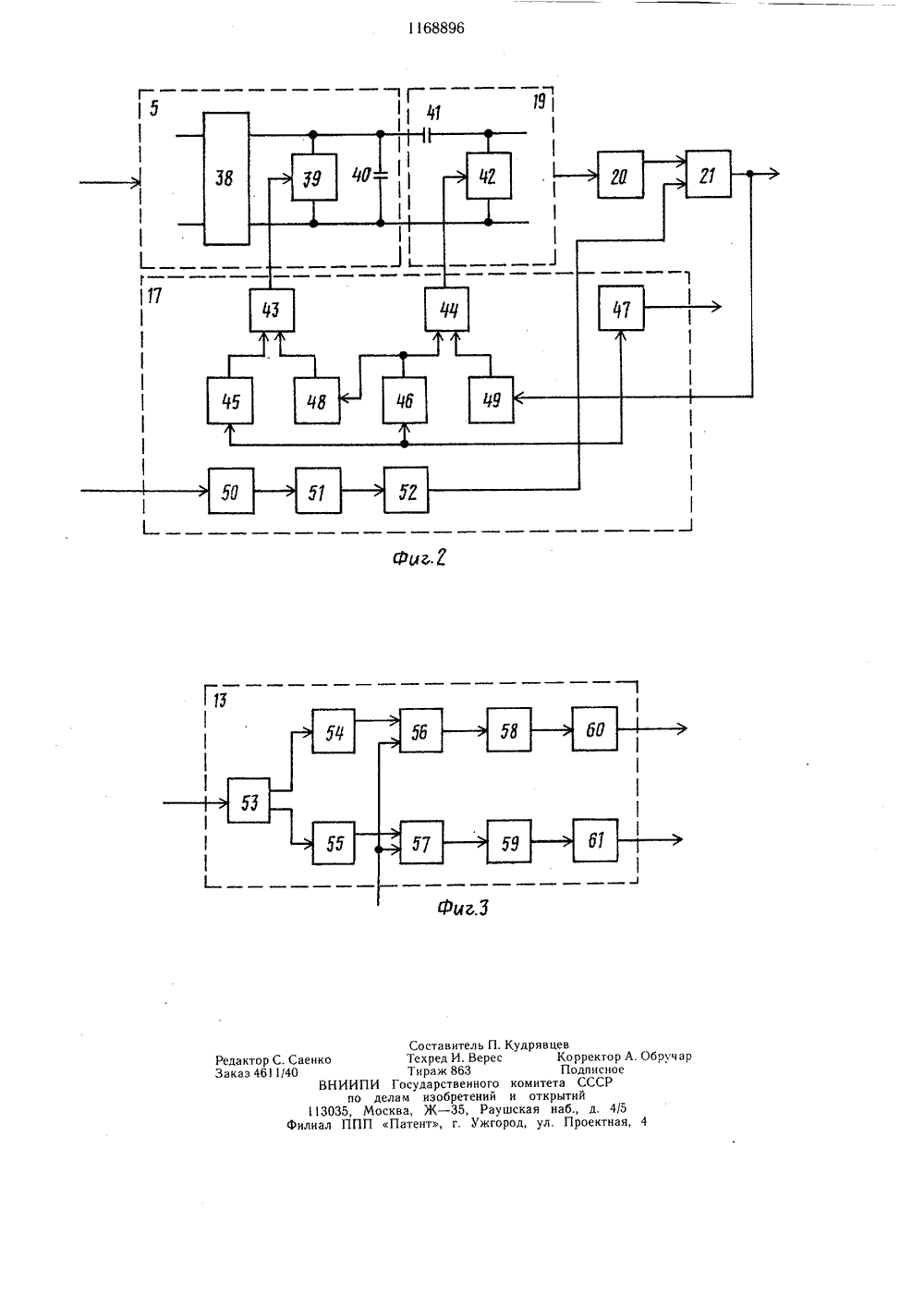
,дну 1 6 с САНИЕ ТЕН ЛЬСТ ЯР ОСУДАРСТВЕННЫИ КОМИТЕТ СССРО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ К АВТОРСКОМ,Ф СВИ(71) Николаевский ордена Трудового Красного Знамени кораблестроительный институим. С. О. Макарова(54) (57) СИСТЕМА УПРАВЛЕНИЯ, содержашая датчик регулируемой координаты, входом подключенный к выходу объекта управления, а выходом - к первому входу первого сумматора, второй вход которого соединен с источником эталонного значения регулируемой координаты, выход первого сумматора подключен к входу формирователя показателя качества, подключенного выходом к первому входу многоканального экстремального регулятора, первый выход которого соединен с первым входом первого блока перемножения, а второй выход - с вторым входом формирователя показателя качества, последовательно соединенные второи сумматор и исполнительный орган, выход которого подключен к входу объекта управления.первый вход второго сумматора соединен с выходом первого блока перемножения, и датчик промежуточной координаты, подключенный к второму выходу объекта управления, отличающаяся тем, что, с целью повьпцения надежности и расширения области применения системы, в нее введены последовательно соединенные фильтр, компаратор, блок формирования и задержки импульсов и триггер, второй блок перемножения и источник стабилизированного напряжения постоянного тока, первый выход которого подключен через второй блок перемножения к второму входу второго сумматора, а второй и третий выходы - Я соответственно к третьему и четвертому входам многоканального экстремального регулятора, пятый вход которого соединен с выходом компаратора, а третий и четвертый выходы - соответственно с вторыми входами второго блока перемножения и ф блока формирования и задержки и м пул ьсов, а второй вход компаратора соеди- р,м нен с выходом датчика промежуточной координаты.СЬИзобретение относится к экстремальным самонастраивающимся системам и может найти применение для управления объектами, подвергающимися в процессе эксплуатации периодическому возмущающему воздействию, например электродвигателями приводов поршневого компрессора, шаровой мельницы, прокатного стана, насоса-качалки глубиннонасосных станций, двигателями привода гребного винта морского судна.Цель изобретения - повышение надежности и расширение области применения системы.На фиг. 1 приведена функциональная схема предлагаемой системы управления; на фиг. 2 - функциональные схемы блока формирования показателя качества, анализатора приращения показателя качества и блока управления; на фиг. 3 функциональная схема блока формирования и задержки импульсов.Система управления содержит датчик 1 регулируемой координаты, объект 2 управления, первый сумматор 3, источник 4 эталонного значения регулируемой координаты, формирователь 5 показателя качества, многоканальный экстремальный регулятор 6, первый блок 7 перемножения, второй сумматор 8, исполнительный орган 9, датчик 1 О промежуточной координаты, фильтр 11, компаратор 12, блок 13 формирования и задержки импульсов, триггер 14, второй блок 15 перемножения и источник 16 стабилизированного напряжения постоянно. го тока. Многоканальный экстремальный регулятор 6 содержит блок 17 управления, формирователь 18 кода направления,анализатор 19 приращения показателя качества, логический элемент 20, первую схему 21 совпадения, дешифратор 22, вторую 23, третью 24, четвертую 25, пятую 26, шестую 27 и седьмую 28 схемы совпадения, первый 29, второй 30, третий 31, четвертый 32, пятый 33 и шестой 34 ключи, первый 35, второй 36 и третий 37 интеграторы,Блок 5 содержит выпрямитель 38, ключ 39, конденсатор 40, блок 19 - конденсатор 41 и ключ 42, блок 17 управления - схемы 43 и 44 совпадения, одновибраторы 45 - 47, инверторы 48 и 49, триггер Шмидта 50, дифференциатор 51 и формирователь 52 импульса (импульсный усилитель),Блок 13 формирования и задержки импульсов аналогичен по выполняемым функциям и принципу действия системам импульсно-фазового управления углом включения тиристоров управляемых выпрямителях и содержит диодный коммутатор 53, генераторы пилообразного напряжения (ГПН) 54 и 55, компараторы 56 и 57 релейного типа, дифференциаторы 58 и 59, формирователи 60 и 61 импульсов. 5 10 15 20 25 30 35 40 45 50 55 Система работает следующим образом.Датчик 10 воспринимает промежуточную координату объекта 2 управления, колебания которой используются для синхронизации переменной составляющей функции управления с колебаниями внешнего возмущения, приложенного к объекту. Непосредственное измерение возмущения часто затруднено. Использование колебаний регулируемой координаты для этой цели в случае минимизации этих колебаний исключается, так как в процессе самонастройки они устраняются. С выхода датчика 1 О сигнал поступает непосредственно на первый вход и через фильтр 11 на второй вход компаратора 12. Сигнал на выходе датчика 1 О содержит постоянную и переменную составляющие, на выходе фильтра 11 постоянную, а на выходе компаратора 12 -- разность полного сигнала и его постоянной составляющей, т. е. переменную составляющую. Последняя подается на сигнальный вход блока 13, имеющего два выхода. На первом выходе появляется короткий импульс во время положительной полуволны, а на втором выходе - во время отрицательной полуволны. Эти импульсы смещены по времени относительно моментов перехода сигнала на входе блока 13 через нулевой уровень на время т, определяемое сигналом .на управляющем входе блока 13. С выходов блока 13 сигналы поступают на соответствующие входы триггера 14 с раздельными входами, затем с его выхода - на первый вход блока 7 перемножения, а с выхода последнего - на первый вход сумматора 8, Сигнал на выходе блока 7 является переменной составляющей функции управления1) з 1 дп ыпо(1+т).Амплитуда 1.)определяется управляющим сигналом, который поступает на второй вход блока 7 перемножения с соответствующего выхода экстремального регулятора 6. Постоянная составляющая функции управления 1.)о поступает на второй вход сумматора 8 с выхода второго блока 15 перемножения, на первый вход которого поступает сигнал от источника 16 стабилизированного напряжения постоянного то. ка, а на второй вход - управляющий сигнал с соответствующего выхода экстремального регулятора 6. С выхода сумматора сигнал поступает на вход исполнительного органа и с выхода последнего - на вход объекта управления.Контур самонастройки содержит датчик 1 регулируемой координаты, сумматор 3, формирователь 5 показателя качества и экстре. мальный регулятор 6, соединенные последовательно. На второй вход сумматора 3 поступает со знаком минус задаваемое значение регулируемой координаты У (эталон). Отклонение регулируемой координаты У от5 О 5 20 25 30 35 40 45 50 55 заданного значения У. с выхода сумматора поступает ца вход формирователя 5, который формирует сигнал 0, являющийся показателем качества, в частности, вида - наиболыпее за период отклонение по модулю регулируемой координаты 1 от заданного значения У. На второй вхол формирователя 5 в начале периода (в нулевой фазе колебаний переменной составляющей промежуточной координаты) поступает импульс с выхода блокауправления, служащий для сброса значений 0 на выходе формирователя 5 (т. е. очистка памяти и подготовка ее для запоминания нового значения 0 в очередном периоде).Экстремальный регулятор 6 осуществляет автоматический поиск экстремальных значений параметров функции управления .)о и .)1 т по методу покоординатного спуска с совпадением пробного и рабочего шагов, Работа регулятора разделена на такты. Тактовые импульсы, управляющие работой регулятора, формируются блоком 17 управления в началекаждого периода колебаний. На выходе анализатора 19 к моменту поступления очередного тактового импульса ца входе схемы 2 совпадения устанавливается сигнал, опрелеляемый разностью значений показателей качества Я в истекшем такте и Яв предшествующем ему такте. Этот сигнал несет информацию, о том, привело ли предшествующее изменение параметрово,1 и т к уменьшению показателя качества, т. е. Я - Я- (О, ил и наоборот к увеличению. В первом случае для достижения минимума следует продолжать изменять параметры функции управления в прежнем направлении, а во втором случае направление поиска следует изменить. Всего в рассматриваемом случае шесть направлений поиска, так как число параметров функции управления равно трем (1-о, Ь, т) и каждый из них может быть изменен в сторону увеличения или уменьшения. Логический элемент (триггер Шмидта) 20 формирует на своем выходе сигнал, равный единице (в логическом смысле), если ф - Я-) О, т. е., когда необходимо изменить направление поиска, и ноль, если О 1: - Я;-, ( О. Сигнал с выхода логического элемента поступает на первый вход схемы 21 совпадения, на второй вход которой поступает тактовый импульс с выхода блока 17. Если на выходе элемента 20 сигнал соответствует уровню единицы, то тактовый импульс проходит на выход схемы 21 совпадения, который соединен с входом формирователя 18 кода направпения, являющегося реализацией абстрактного автомата %ура, имеюгцего шесть устойчивых состояний соответственно числу направлений поиска. Каждому состоянию соответствует определенная комбинация нулей ц единиц на выходе блока. Формирователь 18 может быть выполнен как кольцевой счетчик (например, на трех триггерах с обратными связями) с шестью различными состояниями. Все направления поиска нумеруются цифрами от единицы до шести (или от нуля до пяти), а код направления соответствует номеру направления в двоичном представлении чисел. Кол направления поступает на вход лешифратора 22, и ца соответствующем этому коду выходе (выхоле с соответствующим номером) устанавливается сигнал уровня единицы, а на остальных выходах - сигнал уровня нуля. Когда на выход схемы 21 совпадения (при Я - Я 0), проходит тактовый импульс, происходит смена кода и единица перемещается на другой выход лешифратора 22, поиск экстремума продолжается в новом направлении, Выходы лешифратора соединены с первыми входами ключей 29 - 34, на вторых входах которых после смены кода, или если в данном такте смены кода не происходит, одновременно с появлением тактового импульса на входе схемы 21 совпадения появляется импульс. Этот импульс проходит на выход той схемы совпадения, на первом вхоле которой имеется сигнал единичного уровня, и затем поступает на вход соответствующего ключа (ключи 29 - 34) . Ключ замыкается на время действия импульса ца его входе и соединяет соответствующий вход интегратора (интеграторы 35 - 37) с шиной положительной или отрицательной полярности напряжения, т. е. с вторым или третьим выходом источника6 стабилизированного напряжения постоянного тока. При этом сигнал на выходе этого интегратора получает положительное или отрицательное приращение (в зависимости от того, какой ключ замыкается). Шириной импульса, поступающего на вторые входы схем совпадения с выхода блока 17, можно устанавливать шаг этого приращения (шаг поиска).Блок3 работает следующим обра. зом. Переменное напряжение низкой частоты (частоты вынужденных колебаний в системе) поступает на диодный коммутатор 53. Положительная полуволна этого напряжения поступает на вход ГПН 54 первого канала, а отрицательная полуволна на вход ГПН 55 другого канала, На выходе ГПН напряжение линейно нарастает в течение полупериода колебаний, затем быстро возвращается на нулевой уровень. С выхода ГПН это напряжение поступает ца первый вход компаратора 56 релейного типа, на второй вход которого поступает напряжение управления с выхода экстремального регулятора. Когда напряжение пилы ца первом входе достигает уровня напряжения управления ца второмвходе, на выходе компаратора напряжение скачком возрастает, а в конце полупериода скачком уменьшается до исходного значения. Образуются прямоугольные импульсы, положение переднего фронта которых определяется наклоном пилы ГПН и уровнем напряжения управления. На выходе лифферецциатора 58 образуются импульсы положительной и отрицательной полярностей, соответствующие переднему и залцему фронтам прямоугольных импульсов ца его входе. Формирователь 60 импульса (например, импульсный усилитель) формирует из импульса положительной полярности прямоугольный узкий импульс, служащий для управления триггером 14. Импульс отрицательной полярности не влияет на формирователь импульса либо срезается диодом. Изменяя в процессе самонастройки управляющее напряжение на входе блока 13, экстремальный регулятор устанавливает оптимальное значение параметра функции управления. Импульсы с выхода формирователя 60 в положительный полупериод колебаний и с выхо га формирователя 61 в отрицательный полупериод поступают на единичный и нулевой входы триггера 14. Работу блоков 5, 17, 19 и 21 рассматривают в их взаимосвязи, С выхода блока 3 сигнал отклонения выходной координаты от заданного значения в виде напряжения поступает на выпрямитель (мост Ларионова) 38, на выходе которого напряжение является модулем напряжения на входе. Параллельно выходу вып рям ителя 38 включен конденсатор 40, выполняющий функцию запоминающего элемента. Напряжение ца конденсаторе 40 к концу периода (такта) максимально на период, Запоминание максимума обеспечивается тем, что постоянная времеци заряда конденсатора 40 мала, так как определяется сопротивлением диодов в прямом направлении, а постоянная времени разряда велика, так как определяется сопротивлением диодов в обратном направлении. Таким образом, осуществляется функциональное преобразование (вычисление показателя качества) Я=макс/у - уз), Параллельно конденсатору 40 установлен ключ 39, В начале очередного такта этот ключ замыкается, чем осуществляются разряд конденсатора 40 (очистка памяти) и подготовка к запоминанию нового значения О. Анализатор 19 приращения показателя качества состоит из конденсатора 41, выполняющего функцию элемента памяти, и ключа 42. Когда ключ замкнут, конденсаторы соединены параллельно, и на конденсаторе 41 напряжение становится равным напряжению на конденсаторе 40. Чтобы уменьшить ошибку (напряжение на параллельно включенных конденсаторах несколько ниже, чем было на конденсаторе 5 10 15 20 25 30 35 40 45 50 55 41) емкость конденсатора 41 должна быть значительно меньше емкости конденсато. ра 40. Таким образом осуществляется за. поминание значения Ядля того, чтобы в следующем такте сравнивать его с установившимся к концу текущего такта значением Я. Когда ключ замкнут, падение напряжения на нем равно разности напря. жений на кондецсагорах 40 и 41. Напряжение на конденсаторе 41 соответствует значению Я , а на конденсаторе 40 к концу такта определяется значение Я, т. е. устанавливается соответствующее напряжение. Таким образом к концу такта ца выходе анализатора 19 устанавливается напряжение (падение напряжения ца ключе 42), соответствующее разности Я - .Я,., которое по:тупает на вход логического элемента 20 (например, триггера Шмидта) Если Я -- Я; ;.О, то на выходе логического элемента появляется напряжение уровня логической единицы, что является признаком необходимости изменения направления поиска. Поступая на передний вход схемы 21 совпадения, напряжение уровня единицы обеспечивает прохождение тактовых импульсов, поступающих на второй вход схемы совпа. леция, что приводит к смене кода направления. На входы схемы 21 совпадения и ключей 39 и 42 импульсы должны поступать в следующей последовательности: в начале такта ца вход схемы 21 совпадения, затем на вход ключа 42 и на вход ключа 39. Ширина импульса на входе ключа 42 должна быть достаточной для перезаряда конденсатора 41, а ширина импульса на входе ключа 39 - для разряда конденсатора 40. Импульсы с указанными характеристиками вырабатываются блоком 17 управления сле. дующим образом. Сигнал с выхода компаратора 12 (переменная составляющая ко. лебаний промежуточной координаты объекта управления) поступает на вход триггера Шмидта 50, на выходе которого образуется импульс напряжения прямоугольной формы. На выходе дефференциатора 51 образуются 1 зкие импульсы положительной полярности в начале периода, соответствующие переднему фронту прямоугольных импульсов на входе, и отрицательной по. лярности, соответствующие заднему фронту, При поступлении на вход формирователя 52 импульсов положительной полярности на его выходе образуются тактовые импульсы, поступающие одновременно на входы схемы 21 совпадения и олновибраторов 45 - -47. С выхода одновибратора 47 импульсы поступают на вторые входы схем 23 - 25 совпадения. Ширина этих импульсов определяет величину приращения параметра управления, по которому осуществляется поиск, т. е, шаг поиска. Импульсы с выходов одновибраторов 45 и 46 поступаю; на первые входы схем 43 и 44 совпа.1168896 Фиг. 1 дения на вторые входы которых через логические инверторы 48 и 49 поступают сигналы с выходов одновибратора 46 и источника 16. Инверторы 48 и 49 и схемы 43 и 44 совпадения выполняют логическую функцию запрета. Сигнал на входе ключа 42 появляется лишь после того, как заканчивается тактовый импульс, чем обеспечивается нормальная работа формирователя 18 кода направления. Сигнал на входе ключа 39 появляется только после того,как снимается сигнал с входа ключа 42, т. е. исчезает напряжение на выходе одновибратора 46. Ширина импульса на выходе одновибратора 45 должна быть больше ширины импульса на выходе одновибратора 46 на время, достаточное для надежного разряда конденсатора 40. Предлагаемая система может быть выполнена на базе типовых средств автома О тизации.Редактор С. Саенко Заказ 4611/40 Составитель П. Кудрявцев Техред И. Верес Корректор А. Обручар Тираж 863 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж - 35, Раушская наб., д. 4/5 Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
СмотретьЗаявка
3603694, 09.06.1983
НИКОЛАЕВСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ КОРАБЛЕСТРОИТЕЛЬНЫЙ ИНСТИТУТ ИМ. С. О. МАКАРОВА
КОВАЛЕВ ОЛЕГ АЛЕКСАНДРОВИЧ, ВЕРЕЩАГО ЕВГЕНИЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки:
Опубликовано: 23.07.1985
Код ссылки
<a href="https://patents.su/6-1168896-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Логическое устройство, исключающее ложный логический сигнал на выходе

Номер патента: 1798916
Опубликовано: 28.02.1993
Авторы: Гавзов, Дрейман, Нагайцева
МПК: H03K 19/02
Метки: выходе, исключающее, логический, логическое, ложный, сигнал
...полярности, логическому "О" - импульсные сигналы положительной полярности, Повреждение элементов устройства приводить лишь к пропаданию логического сигнала на выходе(отсутствию импульсов или появлению постоянного напряжения), что является сигналом аварии и от которого последующие элементы не работают.На фиг,2 представлена принципиальная схема логического элемента, состоящего из оптоэлектронных ключей 4-7, входы которых являются входами устройства, а выходы соединены с входами выпрямителей 8 - 11, выходы выпрямителей 8, 10 соединены с входами первого управляемого генератора 12, выходы выпрямителей 9, 11 соединены друг с другом и с входом второго управляемого генератора 13. выходы 37 и 39 соответственно первого генератора 12 и...
Устройство преобразования размаха сигнала цветовой поднесущей в постоянное напряжение

Номер патента: 1088154
Опубликовано: 23.04.1984
Авторы: Басий, Матвеев, Сташкив
МПК: H04N 7/02
Метки: напряжение, поднесущей, постоянное, преобразования, размаха, сигнала, цветовой
...а выход - к С-входу 550-триггера.На чертеже представлена структурная электрическая схема устройства преобразования размаха сигнала цветовой поднесущей в постоянное напряже" 6 О ние.Это устройство содержит полосовой Фильтр 1, первый компаратор 2, Р- триггер 3, интегратор 4, второй компаратор 5, блок ИЛИ 6, блок 7 предварительной установки 0" триггера,сумматор 8, генератор 9 шума, аттенюатор 10.Устройство работает следукщим образом.Входной сигнал цветовой поднесущей через полосовой Фильтр 1 поступает на первый вход первого компаратора 2 и второй вход второго компаратора 5. Второй компаратор 5 преобразует сигнал цветовой поднесущей в импульсы, частота которых равна частоте цветовой поднесущей, адлительность зависит от величинынапряжения,...
Устройство оценки частоты сигнала на фоне помех

Номер патента: 629641
Опубликовано: 25.10.1978
МПК: H04B 1/10
Метки: оценки, помех, сигнала, фоне, частоты
...подается на преобразователь Гильберта 7. Если мпеовенное значение частоты сигнала не попадает в спектр помехи, то ее сцнфазная и квадратурнзя по отношеепцо к сигналу состав.ляюцЕие связаны между собой преобразованием Гильберта. В этом случае напряжение на выходе преобразователя Гильберта 7 будет представлять собоц квадратурцу 1 о составляющую помехи, которая подается далее ца один из входов блока 9 оценки фазовой ошибки. На второй вход блока 9 оценки фазовой ошибки с выхо. да амщпетудного детектора 3 через липни задержки 8 подастся огцбаюшая суммы сигнала и по. меха. Блок 9 определяет фазовую ошибку через арксец 1 ус отцощеееия квадратурцой состав 11 яюецей З 11 помеха к сумме сигнала и помехи. Фазова 11 01 ццб"Ф ка с выхода блока 9...
Устройство формирования вызывного сигнала

Номер патента: 778686
Опубликовано: 07.05.1988
МПК: H04M 19/02
Метки: вызывного, сигнала, формирования
...выходного напряжения р ВТОРОЙ ВХОД кОтОРОГО пОДсоеДи 25нен к выходу блока управления, введен блок генератора модулированногонапряжения, первый вход которого под,ключен к выходу генератора опорногонапряжения, а второй вход подключенк внешнему генератору прямоугольныхколебаний, а выход подсоединен ковходу блока согласования. Генераторопорного напряжения выполнен по схеме стабилизатора пульсирующего на;ря жения, второй выход которого подсоединен ко входу блока управления,На чертеже изображена структурнаяэлектрическая схема предложейногоустройства.Устройство формирования вызывногосигнала содержит генератор 1 опорно"го напряжения, блок 2 согласования,амплитудный детектор 3, коммутатор.4полярности выходного напряжения,45блок 5 управления,...
Биполярный источник постоянного напряжения

Номер патента: 1259230
Опубликовано: 23.09.1986
МПК: G05F 1/56
Метки: биполярный, источник, постоянного
...напряжения положительной полярности переключатели 8 и 9 устанавливают в положение "+. Выпрямленное напряжение положительной полярности поступает с выпрямителя 2 через балластный резистор 3 на регулирующий элемент 4 и с помощью соответствующего контакта переключателя 8 подается на выход источника, Переключатель 9 при этом так же переводится в положение +", на его инвертирующий вход подается сигнал с блока 11 опорного напряжения, Сигнал рассогласования поступает с делителя б напряжения обратной связи на неинвертирующий вход усилителя 5 рассогласования, а затем - на вход регулирующего элемента 4, изменяя протекающий через него ток и, соответственно, падение напряжения на резисторе 3, поддерживая постоянным напряжение на выходе источника. В...
Предыдущий патент: Устройство для управления дистанционным манипулятором
Следующий патент: Система автоматического управления
Случайный патент: Ультразвуковое устройство для контроля качества материалов