Электропривод переменного тока и его варианты
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 991570
Авторы: Бродовский, Жилин, Иванов





Текст
ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскихСоциалистинескихРеспублик и 991570(61) Дополнительное к авт. свид-ву- (22) Заявлено 100481 (21) 3275628/24-07 с присоединением заявки МИ 1 М Клз Н 02 Р 5/34 Н 02 Р 7/42,Государственный комитет СССР но делам изобретениИ н открытий(23) Приоритет 331 УДК 621. 316. ,7-62:83 (088.8) Опубликовано 23,0133, Бюллетень йо 3 Дата опубликования описания 230183(72) Авторыизобретен В. Н. Бродовский, А, С. Жилин и Е. С. И71) Заявите 4) ЭЛЕКТРОПРИВОД ПЕРЕИЕННОГО ТОКА (ЕГО ВАРИ 20 0 Изобретение относится к электротехнике и может быть использовано в . управляемых электроприводах общепромышленного назначения, построенных на базе асинхронного двигателя с короткозамкнутым ротором, к которым предъявляются высокие требования по точности и качеству управления.Известен электропривод переменного тока на базе асинхронного двига-, теля с короткозамкнутым ротором, содержащий блок задания тока, подключенный через управляемый источник тока к обмоткам статора асинхронного двигателя, а также формирователь опорных сигналов, выполненный в виде управляемого генератора колебаний, выходы которого подключены к входам для гармонических функций управляемого источника тока, а входы через сумматор частот - к выходам датчика скорости вращения и формирователя частоты токов ротора 111.Точность формирования опорных сигналов в электроприводе, а следовательно точность управления момента на валу двигателя, определяется здесь выходными сигналами датчика скорости вращения и формирователя частоты токов ротора, В известном электроприводе предусмотрена,коррекция выходного сигнала формирователячастоты токов ротора по сигналу сдатчика .момента, однако это не обеспечивает сохранения линейности изменения момента от сигнала заданияпри погрешностях, вносимых, датчикомскорости вращения,Наиболее близким к изобретениютехническим решением является электропривод переменного тока, содержащий блок задания с выходом заданиямодуля опорного параметра и выходомзадания тока, подключенным черезуправляемый источник тока к асинхронному двигателю с короткозамкнутымротором, формирователь опорных сигналов, вход которого связан с сумматором частот, подключенным к выходам датчика скорости вращениявала асинхронного двигателя и формирователя частоты токов ротора, авыход подключен к входам для гармонических функций управляемого источника тока, датчик опорного параметрас выходом модуля опорного параметра,связанным через дискриминатор модуляс входом формирователя опорных сигналов, при этом другой вход дискриминатора модуля соединен с выходоммодуля опорного параметра блока задания (,2,В указанном известном электроприводе осуществляется коррекциячастоты опорных сигналов с учетомпогрешностей, вносимых датчиком скорости вращения и формирователем частоты токов . ротора, по результатамсравнения заданной и измереннойамплитуд потока асинхронного двигателя. 10Анализ работы электропривода, например. в режимах со скоростями вращения, близкими к нулю, показывает,что сигнал коррекции в этом случаеопределяется не только погрешностями формирователя частоты токов ротора, но и величиной частоты токовротора (требуемым моментом на валу).Это означает, что в случае изменения сигнала задания тока и частотытоков ротора (момента на валу), атакже при ударном изменении моментанагрузки, сигнал коррекции долженформироваться с таким же быстродействием, с каким формируется момент.В электроприводах с регулированием тока статора и частоты токов ротора формирование момента на валупроисходит практически без запаздываний и, следовательно, беэ запазды- -Еваний должен формироваться сигналкоррекции. С другой стороны получение сигнала коррекции без пульсаций возмож но только при наличии фильтра с достаточно большой постоянной времени. Сигнал коррекции не должен содержать пульсаций потому, что он воздействует на вход быстродействующего 40 (широкополосного) формирователя опорных сигналов. При наличии даже небольшого уровня пульсаций в сигнале коррекции происходят фазовые искажения опорных сигналов и нарушается линейная зависимость момента от сигнала задания. Пульсации в сигнале коррекции имеют место потому, что модуль потока в датчике опорного параметра формируется путем выпрямления на частоте вращения.Таким образом, коррекция частоты опорных сигналов (частоты токов статора) в известном электроприводе осуществляется при противоречивых требованиях: с одной стороны без 55 запаздываний с целью отработки быстроменяющихся моментов на валу, с другой стороны - с фильтрацией сигнала на выходе дискриминатора амплитуды, На практике возможно только 60 компромиссное решение, которое не обеспечивает желаемой коррекции опорных сигналов в переходных режимах, а следовательно, и точности управления момента на валу, что яв ляется недостатком известного электропривода.Целью изобретения является повышение точности управления электро- привода за счет коррекции выхода формирователя опорных сигналов при сохранении линейной зависимости момента на валу асинхронного двигателя от сигнала задания.Указанная цель достигается тем, что в электроприводе переменного тока по первому варианту введены блок умножения, выход которого подключен к входу формирователя опорных сигналов, первый вход - к выходу сумматора частот, а второй вход связан с выходом дискриминатора амплитуды.В электропривод по второму варианту введены дискриминатор фазы и блок умножения, выход которого подключен к входу формирователя опорных сигналов, первый вход - к выходу сум матора частот, а второй вход через дискриминатор фазы связан с выходом фазы датчика опорного параметра, при этом другой вход дискриминатора фазы соединен с выходом формирователя опорных сигналов.В электропривод по третьему варианту введены дискриминатор фазы, блок обратного преобразования координат и блок умножения, выход которого подключен ко входу формирователя опорных сигналов, первый входк выходу сумматора частот, а второй вход через дискриминатор Фазы и блок обратноГо преобразования координат связан с выходом датчиков Фазных токов асинхронного двигателя, при этом входы для гармонических функций блока обратного преобразования координат подключены к выходу фазы датчика опорного параметра, а другой вход дискриминатора фазы соединен с выходом задания тока блока задания.На Фиг. 1-3 представлены варианты выполнения электропривода переменного тока.Согласно первому варианту (фиг. 1) электропривод переменного тока содержит асинхронный двигатель 1 с короткозамкнутым ротором, подключен-, ный к выходу блока 2 задания через управляемый источник 3 тока, составленный из блока 4 прямого преобразования координат и преобразователя 5 напряжения, охваченного жесткой отрицательной обратной связью по току.Ко входам для гармонических функций управляемого источника 3 тока (блока 4 прямого преобразования координат) подключены выходы Формирователя б опорных сигналов, выполненного в, виде управляемого генератора колебаний, Вход формирователя 6опорных сигналов через блок 7 умно-жения соединен с выходом сумматора8 частот, подключенного к выходамдатчика 9 скорости вращения валаасинхронного двигателя и формирователя 10 частоты токов ротора. Электгтропривод содержит также датчик 11опорного параметра и фильтр 12,выход которого подключен к другомувходу блока 7 умножения, а вход -к выходу дискриминатора 13 модуля 10опорного параметра. Входы дискриминатора 13 соединены с .выходом модуля датчика 11 опорного параметра ивыходом задания модуля блока 2 задания., 15Согласно второму варианту (фиг. 2)электропривод переменного тока дополнительно содержит дискриминатор 14фазы опорного параметра, один извходов которогосоединен с выходом 20Фазы датчика 11 опорного параметра,другой из входов - с выходом формирователя б опорных сигналов, а выход - с входом Фильтра 12.Согласно третьему варианту (фиг. 3) 25электропривод переменного тока дополнительно содержит блок 15 обратного преобразования координат -идискриминатор 1 б. фазы, один из входов которого соединен через блок 15обратного преобразования координатк выходам датчиков 17 фазных токов,другой из входов - с выходом задания тока блока 2 задания, а выход -с входом Фильтра 12.По первому варианту (фиг. 1)электропривод переменного тока, реа.-. лизующий частотно-токовое управление, работает следующим образом.40Питание асинхронного двигателя 1 осуществляется от управляемого источника 3 тока, составленного из блока 4 прямого преобразования координат . 45 и преобразователя 5 напряжение, охваченного жесткой отрицательной обратной связью по току. На,входы блока 4 поступают сигналы 0,с выходов блока 2 задания в виде сигналов постоянного тока, определяющие реактивную и активную составляющие тока статора машины соответственно в выбранных ортогонально расположенных осях, связанных с осью опорного параметра. Координатные преобразования сигналов заданияв блоке 4 осуществляются.с помощЬю опорных сигналов (гармонических функций). поступающих с выходов формирователя б опорных сигналов и выполненного в 60 виде управляемого генератора колебаний. Управляющий сигнал для генератора, поступающий с выхода сумматора 8, содержит погрешности, определяемые работой датчика 9 скорости 65 и формирователя 10 частоты токов ротора и влияющие на .точность опорных сигналов на выходе Формирователя б.С целью компенсации указанных погрешностей к выходу сумматора 8 частот подключен блок 7 умножения, на второй вход Которого поступает сигнал дК коррекции, полученный в дискриминаторе 13 модуля потока по результатам сравнения заданногоблоком 2 задания и измеренного Яи датчиком 11 модулей потока. В блоке 7 умножения выполняется. К.К,)и+ К;дК,)фШК=к,й,к В О) где с 0, цз - частоты вращения двигателя и токов роторасоответственно;К, К - статические коэффициенты передачи датчика9 и формирователя 10;дК,ЬК- погрешности коэффициентов передачи.Рассматривая режим работы в=0 из (1) получаемЬК=-(М1"Хт.е. сигнал ЬК коррекции определяется только погрешностям Формирователя 10 частоты токов ротора и никак не связан с величиной Чл.(моментом на валу).Следовательно, в электроприводе (фиг. 1) нет требований об изменении сигнала коррекции с большим быстродействием, определяемым изменением частоты В. При этом сигнал коррекции может быть пропущен через фильтр 12 с такой постоянной времени, которая обеспечивает требуемое подавле ление пульсаций. Постоянная времени фильтра 12 не оказывает влияния на отработку электроприводом быстро- меняющихся моментов на валу, а Формирование сигнала коррекции без пульсаций повышает точность опорных сигналов на выходе формирователя б.Коррекция частоты (фазы) опорных сигналов производится здесь за счет изменения крутизны управляющего сигнала на входе Формирователя б опорных сигналов (генератора колебаний).Работа электропривода по второму варианту (Фиг. 2) аналогична первому с той лишь разницей, что сигнал ЬК коррекции для управляющего сиг- нала генератора б Формируется в дискриминаторе 14 фаз по результатам сравнения Фазы опорного сигнала на выходе генератора б и измеренной фазы и опорного параметра на выходе датчика 11 Здесь также может быть установлен фильтр 12 для подавления пульсаций в сигнале коррекции, неренным с той лишь разницей, что сигнал коррекции для управляющего сигна ла генератора б формируется в дискри.- минаторе 16 фаэ по результатам срав . нения фазы задаваемого тока, составляющие которого определяются сигналами задания на выходе 2, и фазы 10 измеренного тока, формируемой на выходе блока 15 обратного преобразования координат и определяемой сигналами 0 , Ц , соответствующими иэмеренным состСавляющим тока. Опорные сигйалы для блока 15 обратного преобразования поступают при этом с выхода фазы датчика 11 опорного параметра. Здесь также может быть установлен фильтр 12 для подавления пульсаций в сигнале коррекции,2 ЭО 40 3. Электропривод переменного тока, содержащий блок задания с выходом задания тока, подключенным че-. рез управляемый источник тока к асинхронному двигателю с короткоэамкнутым ротором, формирователь опорных сигналов, вход которого свя-. зан с сумматором частот, подключенным к выходам датчика скорости вращения вала асинхронного двигателя и формирователя частоты токов ротора, а выход подключен к входам для гармонических фуйкций управляемого источника тока, датчик опорного параметра с выходом фазы опорного параметра, связанным с входом формирователя опорных сигналов, а также датчики фазных токов асинхронного двигателя, о т л и ч а ю щ и й с я тем, что, с целью повышения точности управления, введены дискриминатор фазы, блок обратного преобразования координат и блок умножения, выход которого подключен к входу формирователя опорных сигналов, первый вход - к выходу сумматора частот, а второй вход через дискриминатор фазы и,блок обратного преобразования координат связан с выходами датчиков Влияющий на быстродействие электропривода.Работа электропривода по третьему варианту (фиг. 3) аналогична рассмотТаким образом, в предлагаемом электроприводе переменного тока решается задача повышения точности управления момента на валу асинхронного двигателя эа счет коррекции частоты (фазы) опорных сигналов пу- тем изменения крутизны управляющего сигнала на входе формирователя опорных сигналов (управляемого генератора колебаний). При этом допускается установка фильтра с требуемой постоянной времени для подавления пульсаций в сигнале коррекции, В электро- приводе обеспечивается высокое быстродействие в переходных динамических .режимах и высокая точность управле-. йия при сохранении линейной зависимости момента на валу асинхронного двигателя от сигнала задания при погрешностях, вносимых формирователем частоты токов ротора. Формула изобретения 1. Электропривод переменного.тока, содержащий блок задания с выхо; дом задания модуля опорного параметра и выходом задания тока, подключенным через управляемый источник тока к асинхронному двигателю с ко- . роткоэамкнутым ротором, формирователь опорных сигналов, вход которого связан с суьвюатором частот, подключенным к выходам датчика скорости вращения вала асинхронного двигателя и формирователя частоты. токов ротора, а выход подключен к входам для гармонических функций управляемого источника тока, датчик опорного параметра с выходом модуля опорного параметра, связанным через дискриминатор модуля с входом формирователя опорных сигналов, при этом другой вход дискриминатора модуля соединен с выходом модуля опорного параметра блока задания, о т л и ч а ю щ и йс я тем, что, с целью повышения точности управления, введен блок умножения, выход которого подключен к входу формирователя опорных сигналов, первый вход - к выходу сумматору частот, а второй вход связан с выходом дискриминатора модуля.2. Электропривод переменного тока, содержащий блок задания с выходом задания тока, подключенным через управляемый источник тока к асинхронному двигателю с короткозамкнутым ротором, формирователь опорных сигналов, вход которого связан с сумматором частот, подключенным к выходам датчика скорости вращения вала асинхронного двигателя и формирователя частоты токов ротора, а выход подключен к входам для гармонических функций управляемого источника тока, датчик опорного параметра - с выходом фазы опорного параметра, связанным с входом формирователя опорных сигналов, о т л и ч а ю щ и йс я тем, что, с целью повышения точности управления, введены дискриминатор фазы и блок умножения, выход которого подключен к входу формирователя опорных сигналов, первый вход - к выходу сумматора частот, а второй вход через дискриминатор фазы связан с выходом фазы датчика опорного параметра, при этом другой вход дискриминатора фазы соединен с выходом формирователя опорных сигналов.филиа г.ужго фазных токов асинхронного двигателя,при этом входы для гармоническихфункций блока обратного преобразования координат подключены к выходуфазы датчика опорного параметра, адругой вход дискриминатора фазы соединен с выходом задания тока. блоказадания.. Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРМ 656175, кл. Н 02 Р 5/34, 1976. 2. Авторское свидетельство СССРпо заявке Р 3263984/24-07, 1981.
СмотретьЗаявка
3275628, 10.04.1981
ПРЕДПРИЯТИЕ ПЯ В-8670
БРОДОВСКИЙ ВЛАДИМИР НИКОЛАЕВИЧ, ЖИЛИН АНАТОЛИЙ СЕМЕНОВИЧ, ИВАНОВ ЕВГЕНИЙ СЕРАФИМОВИЧ
МПК / Метки
МПК: H02P 5/34
Метки: варианты, переменного, электропривод
Опубликовано: 23.01.1983
Код ссылки
<a href="https://patents.su/5-991570-ehlektroprivod-peremennogo-toka-i-ego-varianty.html" target="_blank" rel="follow" title="База патентов СССР">Электропривод переменного тока и его варианты</a>
Приемник частотноманипулированных сигналов с непрерывной фазой

Номер патента: 1167754
Опубликовано: 15.07.1985
МПК: H04L 27/14
Метки: непрерывной, приемник, сигналов, фазой, частотноманипулированных
...первого формирователя прямоугольных импульсов через делитель частоты соединен с третьим входом переключателя, выход которого соединен с другим входом пятого пере- множителя, выход которого соединен с входом блока фазовой автоподстройки частоты и с первым входом первого перемножителя, второй вход которого соединен с выходом первого фазоврашателя, выход управляемого генератора тактовой частоты соединен с одним входом шестого перемножителя, другой вход которого объединен с другим входом четвертого перемножителя и является входом приемника, выход второго фазоврашателя через второй формирователь прямоугольных импульсов соединен с другим входом второго интегратора, выход четвертого перемножителя соединен с другим входом третьего...
Формирователь фазо-манипулированных сигналов
Номер патента: 1020965
Опубликовано: 30.05.1983
Автор: Брюханов
МПК: H03C 3/02
Метки: сигналов, фазо-манипулированных, формирователь
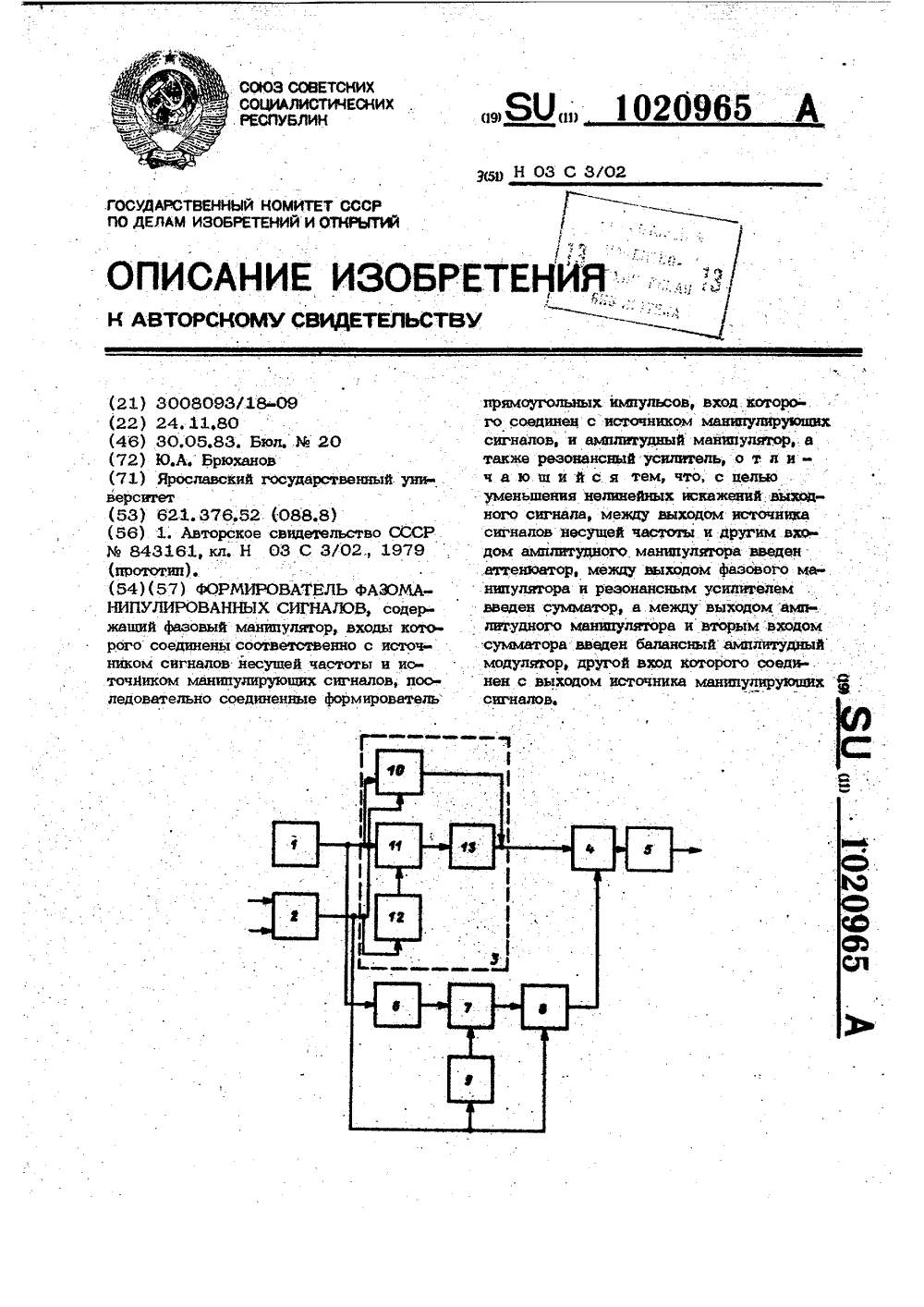
...манипулятора и резонанснымусилителем введен сумматор, а междувыходом амплитудного манипулятора ивторым входом сумматора введен балансный амплитудный модулятор, другой входкоторого соединен с выходом источникаманипулирующих сигналов,На чертеже представлена структурная электрическая схема формирователяфазоманипулированных сигналов,формирователь фазоманипулированныхсигналов содержит источник 1 сигналовнесущей частоты, источник 2 манипулирующих сигналов, фазовый манипулятор 3,ф 55сумматор 4, резонансный усилитель 5,аттенюатор 6, амплитудный манипулятор 7, балансный амплитудный модулятор 8 и формирователь 9 прямоугольных импульсов, При этом фазовый манипуль.тор может быть выполнен, например, ввиде первого и второго ключей 10 и 11,одни...
Цифровой формирователь линейно-частотно-модулированных сигналов
Номер патента: 1259470
Опубликовано: 23.09.1986
Авторы: Иванов, Фролов, Шумаев
МПК: H03C 3/08
Метки: линейно-частотно-модулированных, сигналов, формирователь, цифровой
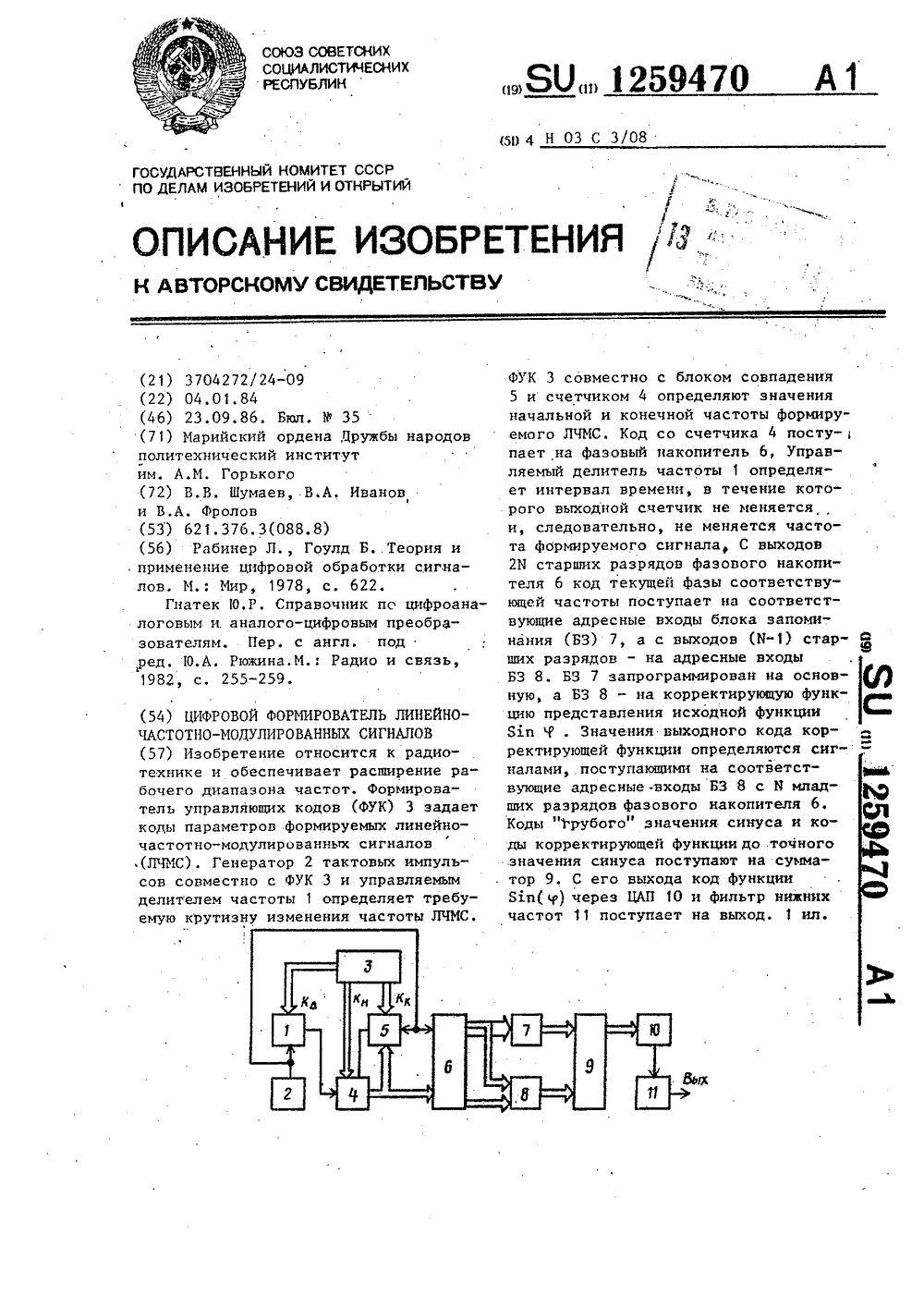
...Фазовыйнакопитель 6 представляет собоймногоразрядный накапливающий сумматор.4Синтезирование ЛЧМ сигнала производится изменением в определенные моменты времени выходной частоты с заданным шагом. В исходном состояниив управляемый делитель 1 частоты записан код (К ), определяющий времяинтервала формирования одной частоты В счетчик 4 записан код (К) начальной частоты формируемого сигнала. На один иэ входов блока 5 совпадения поступает код конечной частоты- разрядность фазового накопителя 6;- частота следования тактовых импульсов;- шаг изменения частоты выходного сигнала.,2"точках аргумента.Тогда суммарный обьем блоков 7 и8 запоминания для хранения значенийсинусондальной функции в узловыхточках Бхп( ч, ) и корректирующихфункций т (М,фар)...
Приемник частотно-манипулированных сигналов с непрерывной фазой

Номер патента: 1540027
Опубликовано: 30.01.1990
МПК: H04L 27/152
Метки: непрерывной, приемник, сигналов, фазой, частотно-манипулированных
...управляемого генератора 10 тактовой частоты, так и для подстройки частотыуправляемого генератора 18.Сигналы с выходов неремножителей,13 и 20 поступают на входы перемножителей 12 и 24, на другие входы кот"рых приходят сигналы от интеграторов6 и 5, прошедшие соответственно чегрез усилители-ограничители 28 и 27.В результате в перемножителях 12 и24 снимается манипуляция с квадратурных составляющих сигналов ошибкинесущего колебания, которые послесложения в сумматоре 25 и подавления в фильтре 26 дискретных составляющих сигналов ошибки несущего ко"лебания воздействуют на частоту уп1540027 10 жителей выходы первого и второго формирователей прямоугольных импульсовсоединены соответственно с первым ивторым входами сумматора по модулю...
Формирователь-распределитель синхронизирующих сигналов

Номер патента: 781802
Опубликовано: 23.11.1980
Автор: Саакян
МПК: G06F 1/04
Метки: сигналов, синхронизирующих, формирователь-распределитель
...Входы элементов задержки 1,3, 4, 5 подключены к выходам формирователя-распределителя, При установлении норм для элементов задержки и описания работы устройства принимается, что задержка переключения элемента И-не 8 ( ) равна О, В дальнейшем она учитйвается после описания принципа работы устройства.Для органиэации симметричного сдвига по фазе между выходами устройства, задержка элемента 1 задержки равна задайной длительности синхросигнала ( ), задержка элемента 2 задержки беретСя равной в-1, иТ равной задержке последнего элемента задержки, в данном случае задержке элемента 5 задержки, Задержки остальных элементов задержки 3 и 4 равны между собой и равны каждая сумме задержек элементов 1 и 2 задержки, а также периоду Т, деленному на...
Предыдущий патент: Устройство для защиты электропривода
Следующий патент: Синхронизированный вентильный электродвигатель
Случайный патент: Способ изготовления моточных изделий