Система идентификации параметров нестационарного нелинейного объекта управления с запаздыванием
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 2003166
Автор: Лащев
Текст
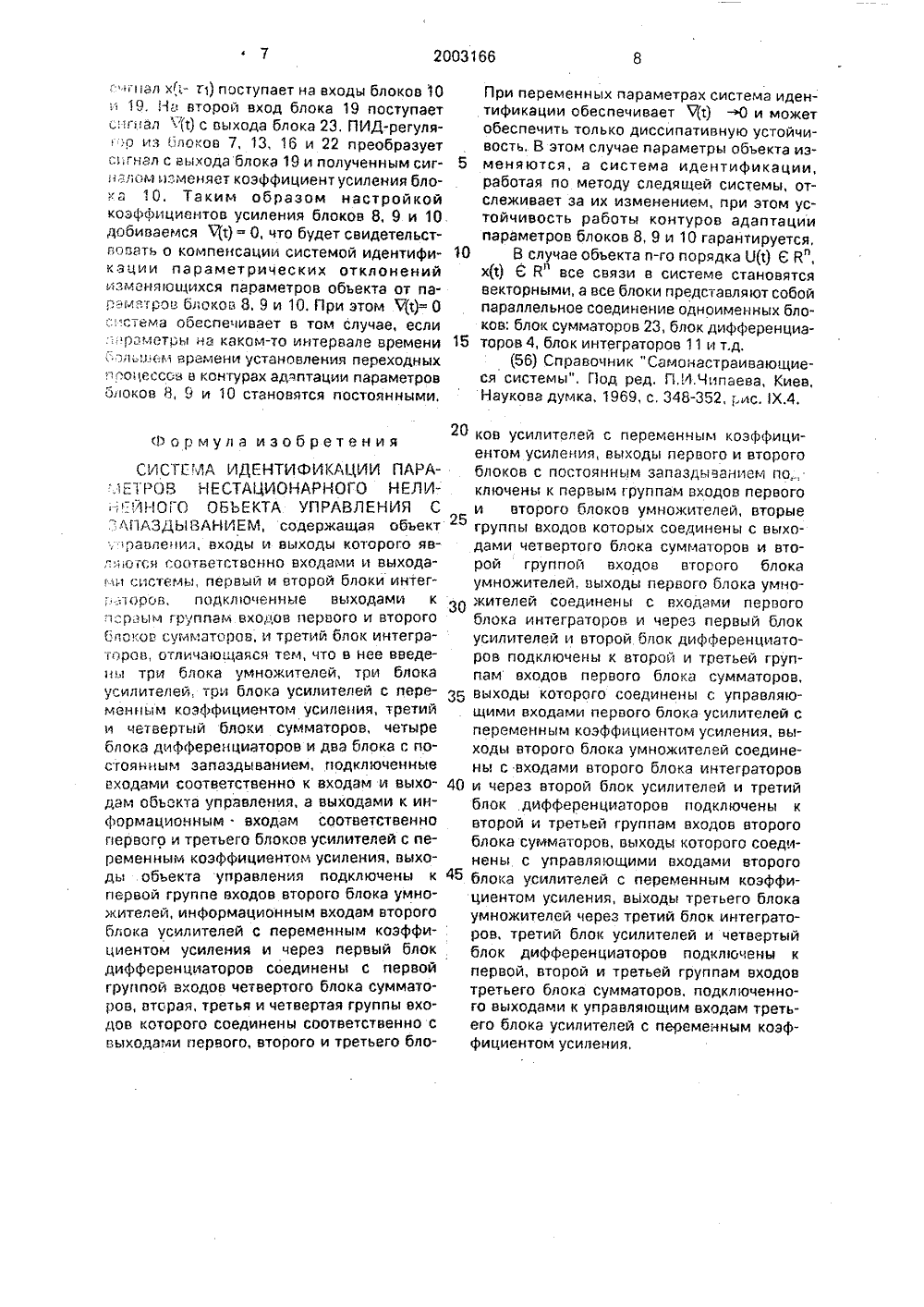
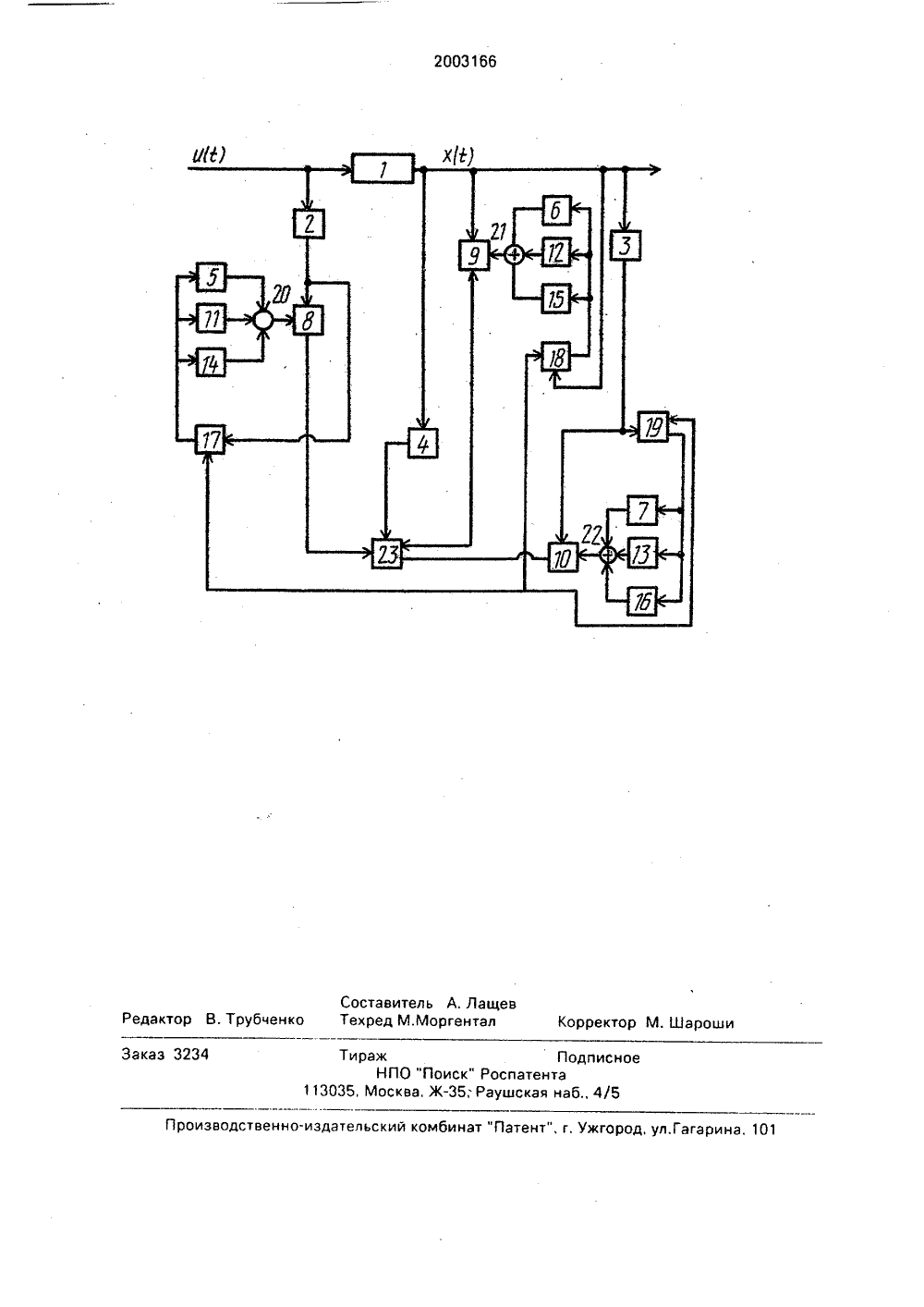
Комитет Российской Федерации по патентам и товарным знакам ИЗОБРЕТЕН ТЕНТУ(76) Лащев Анатопий Яковлевич(54) СИСТЕМА ИДЕНТИФИКАЦИИ ПАРОВ НЕСТАЦИОНАРНОГО НЕЛИНЕЙНОБЪЕКТА УПРАВЛЕНИЯ С ЗАПАЗДЫВ(57) Изобретение относится к системам икации параметров нестационарного объе пения с ходу. Ц упроще ОПИСАН РАМЕТОГО АНИЕМдентификта управ(в) КЮ (и) 20031 бб С 1(51) 5 0 05 В 23 00 постоянным запаздыванием по входу и выель изобретения - повышение точностиние и расширение области применения сисемы идентификации. Цель достигается тем, что истема допоп 1 ьп-"ое эжи блоки усипитепей постоянным запаздыванием, блоки дифферениаторов, блоки усилителей и блоки умножителей. ип.+ Лао Лао+ ЛЬо ЛЬо+ Лсо Лсо (8) Выберем настраиваемую модель объекта 15 откуда ч можно записать в эквивалентномуреалеия х - аох+ ЬоО(- г) + сох(- т) (2) бх 11 О где т и т 1 - постоянные известные запаздыванияя, х - выход объекта, О - входной сигнал.Грусть выполняются равенства(3) Для того, чтобы сумма составляющих,содержащих в качестве сомножителей Лао и Лао была неположительна. достаточно,чтобы тогда из (1), (2),и (3) получим 35 кЛзоО, коЛао 7 х(1)О,бх 7(4) 40 коЛЭочх(1) + ЛЗо ЛЗо = О, 2 ко = к Запишем (4) в следующем виде откуда получим равенства Я) - х - аох - ЬоО(-т) - сох(- т 1),Чн - Лаох + ЛЬоО(- т) + Лсох(И 1), ч = 7 н. 45 Й 01 = ко, ЛЗ 02 = ко х(1),бх 1(5) Лабаз = - ко чх(1),Ввиду того, что равенства (11) одновременно должны быть выполнены, что следует из(9), то закон настройки параметров ао запишем в следующем виде Выберем функцию Ляпунова ч =-кМ 7 н+ 0,5(Лао + ЛЬо + Лсо 2)2 55 Лао = ко(7 х + / ЧхЙ += сопз0 и найдем производную функции Ляпунова о 1 ух(СЯ3 Г(12) ч =к%н+кР 7 н+ Лао Лао+ЛЬо ЛЬо+ Изобретение относится к системам идентификации параметров нестационарного объекта с постоянным запаздыванием.Целью изобретения является упрощение, повышение точности и расширение области применения системы идентификации параметров.Сугь изобретения поясним на примере настационарного нелинейного объекта с по:тоянным запаздыванием первого порядка а = ао + Лао,Ь = Ьо + ЛЬ ,с = со + Лсо,+ л.-Ж:"В+а,.а+25 + кЙоЮ( - т) + кЛсЛх( - т) +(16) Из (12) видно, что алгоритм адаптации при д(т) = 0 обеспечивает схождение параметрических отклонений к нулю.Аналогичные рассуждения для параметров ЬЬ и Ьсо(т) приведут к алгоритмам адаптации параметров в виде Теперь отметим следующее важное обстоятельство, которое состоит в том, что по сути значения параметрических отклонений в модели Ьао ЛЬо(т) и Ьсо(т) являются текущими реальными отклонениями, а полученные в результате синтеза алгоритма адаптации (12) и (13) определяют желаемые законы изменения соответствующих параметрических приращений, которые обозначим в отличие от текущих параметрических отклонений Ьао(т), ЬЬо(т) и Ь-о(т). Точно реализовать желаемые законы изменения параметров Ьао(т), ЬЬо(т) и Ьсо(1) нельзя, поэтому примем законы настройки параметров модели ао(т) = ао(то)+ Ьан(с),Ьо(т) = Ьо(то)+ ЬЬн(т), тосо(т) = со(1 о) + дсн где значения Ьан ЬЬн(т) и Ьсн(т) определены уравнениями (12) и (13), т,е,при этом значение ао(то), Ьо(1 о), со(10) параметры модели до момента включения контуры настройки.Пусть в частном случае 15 20 25 30 35 40 45 50 55 тогда текущее отклонение Ьао можнопредставить в виде Ьаоз(т) = а(т) - ао(Ь) - гЪаоз(т) (17) откуда значение Лаоса(1) (замкнутое) после введения параметрической обратной связи будет видааД 1 -вой ЪфЯ (, ) Таим образом, контур адаптации параметров как любой замкнутый контур регулирования работает по принципу отрицательной обратной связи и поэтому при изменении параметров обьекта во времени точное определение параметров невозможно,На чертеже представлена система идентификации параметров нестационарного обьекта управления с запаздыванием. Приняты следующие обозначения; объект 1 управления (идентификации), блоки 2. 3 с постоянным запаздыванием, блоки 4, 5, 6 и 7 дифференциаторов, блоки 8, 9, 10 усилителей с переменными коэффициентами усиления, блоки 11, 12, 13 интеграторов, блоки 14, 15, 16 усилителей. блоки 17, 18, 19 умножителей и блоки 20, 21, 22 и 23 сумматоров. Работает система следующим образом.В случае системы идентификации параметров обьекта с постоянным запаздыванием первого порядка входной сигнал Цт) поступает на объект 1 и вход блока с постоянным запаздыванием 2, с выхода которого сигнал О(т- т) через блок 8 с переменным коэффициентом усиления поступает на один из входов блока сумматоров 23, на другие входы которого поступают сигналы с выходов блоков 4, 9 и 10. На выходе блока 23 получается сигнал 7(1). Сигнал 7(т) поступает на один из входов блока 17 и умножается в нем с сигналом х(т- т 1) с выхода блока 2, Затем сигнал с вьхода блока 17 поступает на вход ПИД-регулятора, состоящего из блоков 5, 11, 14 и 20, а сигнал с выхода последнего служит сигналом настройки коэффициента усиления в блоке 8,Аналогично настраивается параметр в блоках 9 и 10. Сигнал с выхода обьект 1 поступает на вход блока 18 и умножается с сигналом Ч(т), поступающим с выхода блока 23, Сигнал с выхода блока 18 через второй ПИД-регулятор, состоящий из блоков 6, 12, 15 и 21, является сигналом настройки коэффициента усиления блока 9, После преобразования сигнала х(т) в блоке 3, полученный:ггпал хГ- т 1) поступает на входы блоков 10 и 19. На второй вход блока 19 поступает сигнал Ц) с выхода блока 23. ПИД-регуляр из аллахов 7, 13, 16 и 22 преобразует сигнал с выхода блока 19 и полученным сигналом изменяет коэффициент усиления блока 10. Таким образом настройкой коэффициентов усиления блоков 8, 9 и 10 добиваемся 71) = О, что будет свидетельствовать о компенсации системой идентификации параметрических отклонений изменяющихся параметров объекта от параметров блоков 8. 9 и 10. При этом 7 Ы= О система обеспечивает в там случае, если 5 10:.гаметры на какам-та интервале времени ; лье н. времени установления переходных и .оцессов в контурах адаптации параметров блоков 8, 9 и 10 становятся постоянными,20 Формула изобретения СИСТЕМА ИДЕНТИФИКАЦИИ ПАРА.1 ЕТРОВ НЕ СТАЦИОНАРНОГО НЕЛИ-. ЧНОГОГО ОБ ЬЕКТА. УПРАВЛЕНИЯ С,ПАЗДЫВАНИЕМ, содержащая объект равпения, входы и выходы которого явлаогся соответстванно входами и выходами системы. первый и второй блоки интег; з 1 оров, подключенные выходами к ;1 сраым группам входов первого и второго блоков сумматоров, и третий блок интеграторов, отличающаяся тем, что в нее введены три блока умножителей, три блока усилителей три блока усилителей с переменным коэффициентом усиления, третий и четвертый блоки сумматоров, четыре блока дифференциаторов и два блока г постоянным запаздыванием, подключенные входами соответственно к входам и выходам объекта управления, а выходами к информационнымвходам соответственно первого и третьего блоков усилителей с переменным коэффициентом усиления, выходы объекта управления подключены к первой группе входов второго блока умножителей, информационным входам второго блока усилителей с переменным коэффициентом усиления и через первый блок дифференциаторов соединены с первой группой входов четвертого блока сумматоров, вторая, третья и четвертая группы входов которого соединены соответственно с выходами первого, второго и третьего бло 25 30 40 45 При переменных параметрах система идентификации обеспечивает 7(т) -фО и может обеспечить только диссипативную устойчивость. В этом случае параметры объекта изменяются, а система идентификации, работая по методу следящей системы, отслеживает за их изменением, при этом устойчивость работы контуров адаптации параметров блоков 8, 9 и 10 гарантируется,В случае объекта и-го порядка Цт) 6 й", хт) 6 Я все связи в системе становятся векторными, а все блоки представляют собой параллельное соединение одноименных блоков; блок сумматоров 23, блок дифференциаторов 4, блок интеграторов 11 и т.д.56) Справочник "Самонастраивающиеся системы", Под ред, П,И,Чипаева, Киев, Наукова думка, 1969, с, 348-352, рис. 1 Х,4. ков усилителей с переменным коэффициентом усиления, выходы первого и второго блоков с постоянным запаздыванием по,. ключены к первым группам входов первого и второго блоков умножителей, вторые группы входов которых соединены с выходами четвертого блока сумматоров и второй группой входов второго блока умножителей, выходы первого блока умножителей соединены с входами первого блока интеграторов и через первый блок усилителей и второй блок дифференциаторов подключены к второй и третьей группам входов первого блока сумматоров, выходы которого соединены с управляющими входами первого блока усилителей с переменным коэффициентом усиления, выходы второго блока умножителей соединены с входами второго блока интеграторов и через второй блок усилителей и третий блок .дифференциаторов подключены к второй и третьей группам входов второго блока сумматоров, выходы которого соединены с управляющими входами второго блока усилителей с переменным коэффициентом усиления, выходы третьего блока умножителей через третий блок интеграторов, третий блок усилителей и четвертый блок дифференциаторов подключены к первой, второй и третьей группам входов третьего блока сумматоров, подключенного выходами к управляющим входам третьего блока усилителей с переменным коэффициентом усиления,2003166 оставитель А. Лащеехред М,Моргентал Редактор В. Трубчен ектор М. Шарош аказ 3234 Тираж Подписное НПО "Поиск" Роспатента13035, Москва, Ж; Раушская наб., 4/5 роизводственно-издательск мбинат "Патент", г. Ужгород. ул,Гагарина, 10
СмотретьЗаявка
04858230, 29.08.1990
Лащев Анатолий Яковлевич
МПК / Метки
МПК: G05B 23/00
Метки: запаздыванием, идентификации, нелинейного, нестационарного, объекта, параметров
Опубликовано: 15.11.1993
Код ссылки
<a href="https://patents.su/5-2003166-sistema-identifikacii-parametrov-nestacionarnogo-nelinejjnogo-obekta-upravleniya-s-zapazdyvaniem.html" target="_blank" rel="follow" title="База патентов СССР">Система идентификации параметров нестационарного нелинейного объекта управления с запаздыванием</a>
Способ исключения переходных процессов в блоках сравнения усилителей постоянного тока с двойным преобразованием сигнала

Номер патента: 322724
Опубликовано: 01.01.1971
Авторы: Ворожейкин, Добровинский, Ломтев, Ндин
МПК: G01R 17/00
Метки: блоках, двойным, исключения, переходных, постоянного, преобразованием, процессов, сигнала, сравнения, усилителей
...Вследсгвие этогперезаряжается и переходнЗО лителе будет отсутствовать,на входе усилихемой согласоваомощью двух уп 5 синхронно с щается напряже ряжения на сход- такой же скачокк его выходной конденсатор не й процесс в усиИзобретение относится к области электро- приборостроения и может быть использовано в измерительной технике, автоматике и вычислительной технике.Известные способы уменьшения времени переходных процессов в блоках сравнения основаны на использовании усилителей постоянного тока с гальваническими связями. Однако последним присущ большой дрейф нулевого уровня, в чем они значительно уступают усилителям постоянного тока с двойным преобразованием сигнала,Предлагаемый способ отличается от известных...
Устройство для регулирования температуры

Номер патента: 980076
Опубликовано: 07.12.1982
Авторы: Вербицкий, Иванова, Коломейцева, Митрофанов, Панасенко, Пихлецкий, Фотькин
МПК: G05D 23/19
Метки: температуры
...для регулирования температуры управляет работой индукционногонагревателя 25, состоящего из генератора 26 и индуктора 27. Устройство работает следующим об- зо разом. С помощью переключателей 7-9,входящих в состав задатчика 6, задается требуемая программа термообработки детали. При запуске блок 10 формирует сигналы, переводящие сцетцик 12,реверсивный регистр 14 сдвига и блок 11 в исходное-состояние. Через промежуток:времени, необходимый для окончания переходных процессов во всехцепях устройства блок 10 переводит блок 11 в состояние, соответствующее 1 этапу программы термообработки нагреву детали. При этом блок 1 вырабатывает сигналы, переводящие счетчик 12 и регистр 14 в состояние пря" мого счета и разрешает, прохождение импульсов от...
Усилитель с распределенным усилением

Номер патента: 1223339
Опубликовано: 07.04.1986
Авторы: Говорухин, Горбачев, Громыко, Ивлев, Матвеев
МПК: H03F 3/60
Метки: распределенным, усилением, усилитель
...2, входную линию передачи 3с И отводами, второй балластный резистор 4, транзисторы 5, направленныеответвители 6, корректирующие фильт Оры 7 и дополнительные балластные резисторы 8.Усилитель с распределенным усилением работает следующим образом,Входной сигнал поступает на входную линию 3 передачи, выполненную напоследовательно соединенных направленных ответвителях 6 и делится поровну между транзисторами 5 за счет соответствующего выбора переходного затухания в направленных ответвителях б,которые определяются иэ следующего1 1 1соотношения - ; - ; -11где первое число относится к направ 35ленному ответвителю 6, включенномуна входе входной линии передачи 3, апоследнее - к направленному ответвителю 6, включенному на выходе...
Усилитель с распределенным усилением

Номер патента: 1103345
Опубликовано: 15.07.1984
Автор: Данько
МПК: H03F 1/18
Метки: распределенным, усилением, усилитель
...необходимость включения ца входе усилителя направленного ответвления, обладающего определенными потерями, В СВЧ диапазоне частот это приводит к снижению чувствительности приемных систем.Наиболее близким к предлагаемому является усилитель с распределенным усилением, содержащий входную линию задержки с отводами, выходную линию задержки 25 с отводами и активные элементы, включенцьк между соответствующими отводами входной линии задержки и выходной линии задержки 2.Однако данный усилитель с распределенным усилением не обеспечивает неиска жеццую передачу на выход устройства входных сигналов, при которых работа активных элементов происходит в нелинейной области.Цель изобретения - расширение динамического диапазона входных сигналов при...
Устройство для охранно-пожарной сигнализации

Номер патента: 763935
Опубликовано: 15.09.1980
Авторы: Акимов, Баркова, Гудков, Гусев, Нилов, Стрельников, Ханин, Хохлов
МПК: G08B 25/00
Метки: охранно-пожарной, сигнализации
...появляется сигнал, соответствующий логйческой единице. Сигнал с выхода селектора 7 поступает на первый вход первого блока сравнения 8, на второй вход этого блока поступает сигнал;соответствующий логической единице с 40 опрашиваемоголинейного комплекта, если в линии присутствует непрерывный частотный сигнал.Первый блок сравнения 8 сравнивает сигналы, поступающие с линейного блока 3 и с селектора 7, запускает анализатор 4 и затормаживает генератор 9 на время с, необходимое для выявления анализатором 4 поступающей информации по линии 21 с объектового устройства. С анализатора 4 выявленная информация переписывается в блок памяти вида извещений 13, Наличие информации в блоке памяти вида извещений 13 анализируется блоком разрешения передачи...
Предыдущий патент: Система управления нестационарным объектом с восстановлением вектора состояния
Следующий патент: Устройство контроля проволочного монтажа при его изготовлении
Случайный патент: Захват подкоса для временного креп-ления панелей при монтаже