Способ определения параметров электрических многополюсников
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
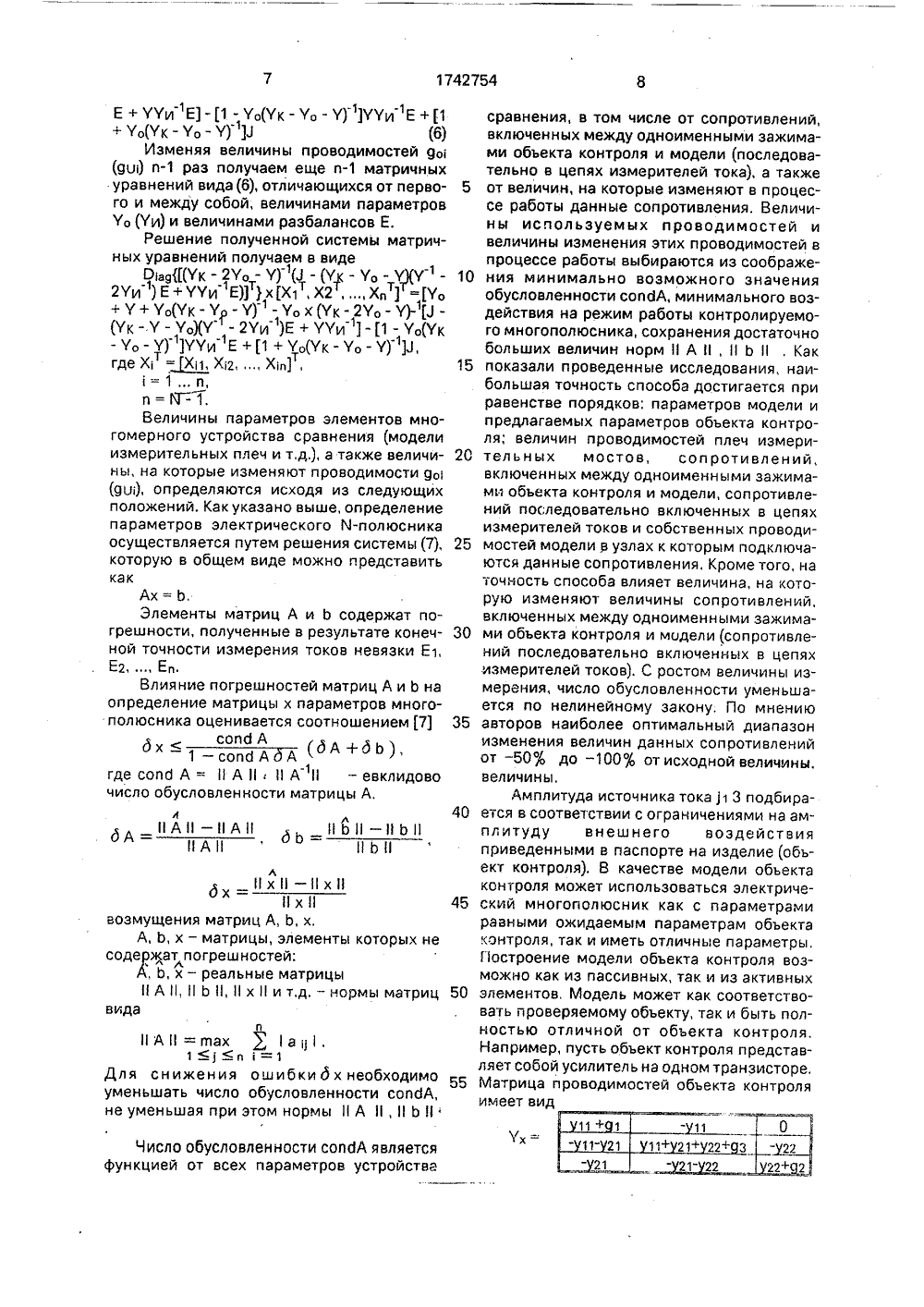
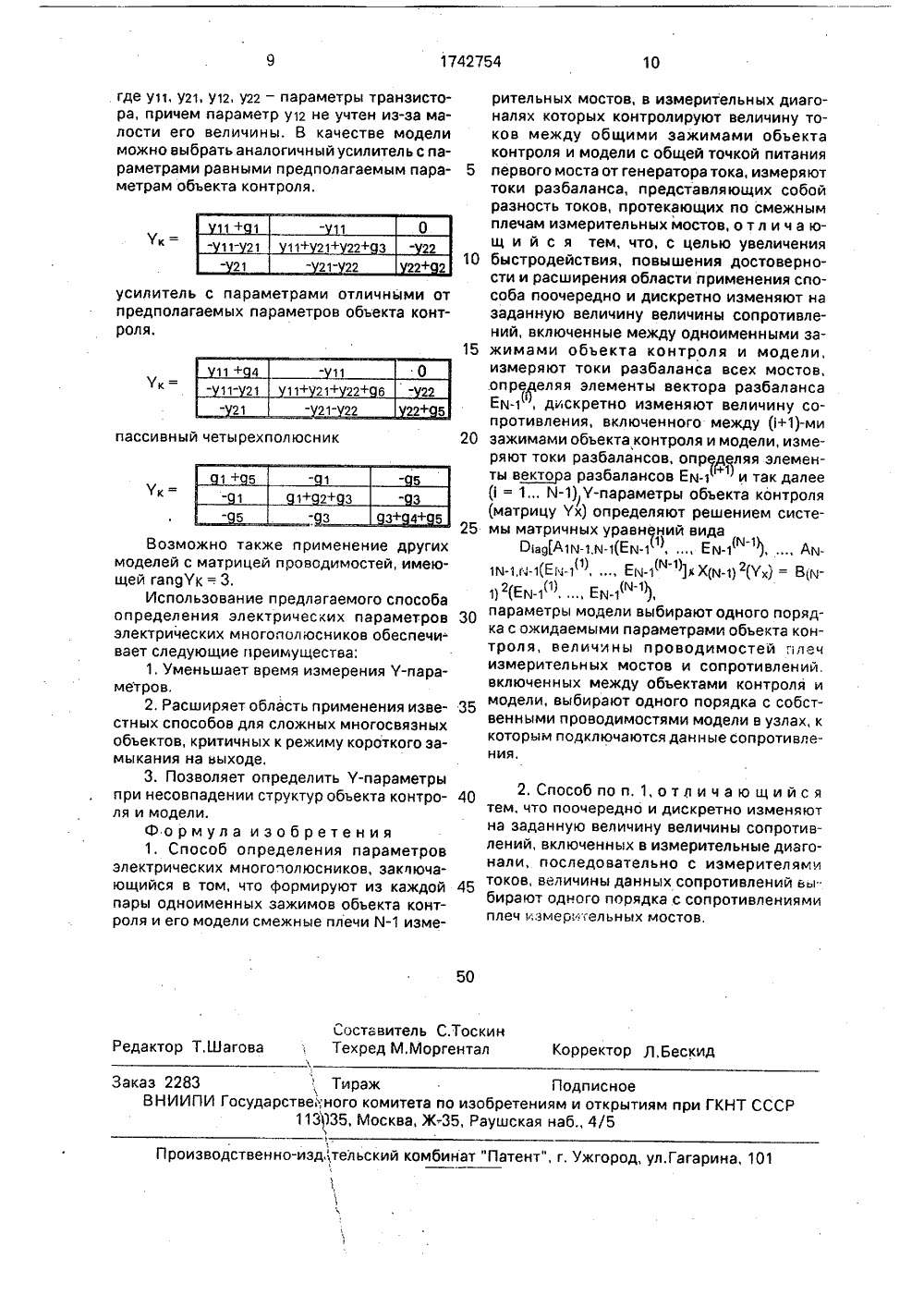
СОЮЗ СОВЕТСКИХСОЦИАЛИС 1 ИЧЕСКИРЕСПУБЛИК 54 5 6 01 й 31/28 ГОСУДАРСТВЕННЫИ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР ОПИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИ ЬСТВУ нический институтфанасьев и И.В,Буоков С.М, Многоустройства, - М.: мин И.В., Шпилевой ные системы поэлевания РЭА. - М.: Ра.ЕЛ Е Н И Я ПАРАМ ЕТИХ М НО ГО ПОЛ ЮС(21) 4780259/21(54) СПОСОБ ОПРЕДРОВ ЭЛЕКТРИЧЕСКНИКОВ Изобретение относится к информационно-измерительной технике и может быть использовано для контроля и диагностирования электронных объектов.Известны способы определения параметров электрических многополюсников и четырехполюсников, в которых одноименные зажимы образцового и измеряемого многополюсников включают в смежные плечи измерительных мостов и производят их уравновешивание, Различие этих и других способов заключается лишь в системе подключения мостов, их питания (переменным или постоянным током). подключении корректирующих усилителей.Недостатки известных способов определения параметров многополюсников заключаются в малом быстродействии, низ(57) Изобретение относится к области информационно-измерительной техники и может быть использовано для контроля и диагностирования электронных объектов. Способ определения параметров электрических многополюсников, состоящий из включения каждой пары одноименных зажимов объекта контроля и его модели в смежные плечи измерительных мостов, питании только первого моста, измерения токов разбалансов измерителями токов, включенных в измерительные диагонали мостов, Новым в способе являются операции изменения величин сопротивлений между одноименными зажимами объекта контроля и его модели, сопротивлений, последовательной включенных в цепи измерителя тока, а также решение системы матричных уравнений,кой достоверности и ограниченной области применения,Наиболее близким техническим решением к предлагаемому изобретению является способ измерения параметров электрическо о четырехполюсника. в котором каждую пару одноименных зажимов исследуемого и образцового четырехполюсников включают в смежные плечи двух мостов и регулируют параметры образцового четырехполюсника до уравновешивания мостов, отличающийся тем, что уравновешивание по элементам первого столбца матрицы производят при закороченных плечах второго моста, а уравновешивание по элементам второго столбца матрицы производят при сопротивлениях плеч второго моста, равных сопротивлению нагрузки контролируемого четырехполюсника, и при питании первого моста.Недостатками прототипа являются малое быстродействие, низкая достоверность и ограниченная область применения.Для достоверного определения параметров элементов контролируемого объекта в прототипе необходимо определенное совпадение структур объекта контроля и модели, В противном случае возникает неоднозначное решение задачи определения параметров объекта контроля. Например, при структурах определение параметров четырехполюсников возможно, но при появлении в объекте контроля несанкционированной связи между точками 1 и 3 задача неразрешима, Малое быстродействие прототипа связано с наличием этапа уравновешивания мостов. Количество циклов уравновешивания неодинаково для различных объектов контроля и многомерных измерительных устройств и определяется понятием сходимости, Многомерные измерительные цепи сравнения в общем случае описываются нелинейным векторным уравнением баланса вида,ф = О, (1) где т(к) - некоторая вектор-функция вектора уравновешивающих величин К;О - вектора сигналов небаланса.Сходимость итерационного процесса уравновешивания определяется свойствами матрицы-якобиана системы уравнений(2)бКДля осуществления быстрой сходимо-. сти необходимо, чтобы недиагональные элементы матрицы чувствительности Я были достаточно малыми по модулю, по сравнению с диагональными, т,е, должна быть сведена к минимуму взаимосвязь контуров уравновешивания, При чисто диагональной матрице Я процесс уравновешивания сходится один цикл, состоящий иэ и операций (для прототипа и = 2). Однако, как правило, матрица Я не является чисто диагональной вследствие наличия взаимосвязей контуров уравновешивания. При этом процесс уравновешивания состоит из нескольких циклов гп, а количество операций прототипа равно щп, Область применения способа ограничена для сложных многосвязных объектов и для объектов, не допускающих короткое замыкание на выходных зажимах. Если контролируемый объект представляет собой сложную многосвязную систему с большими величинами коэффициентов взаимного влияния контуров уравновешивания, то матрица чувствительности Я имеет недиаго модели, измеряют токи раэбалансов, определяя элементы вектора Еиитакдалее (3 = 1И), У - параметры объекта контроля 40 - матрицу Ух - определяют решением системы матричных уравнений вида;ОаяАа-щ(Еьн ),. Ем ),Аи-щун(ЕиР) Е,ч р(ч ) г (у) В(г (Еч.параметры модели выбирают одноо порядка с ожидаемыми параметрами объекта контроля, величины проводимостей плеч измерительных мостов и сопротивлений, включенных между объектом контроля и модели, выбирают одного порядка с собственными проводимостями модели в узлах к которым подключаются данные сопротивленияя. Возможен аналогичный способ, отличающийся от предложенного тем, что 55 поочередно и дискретно изменяют на заданную величину величины сопротивлений, включенных в измерительные диагонали, последовательно с измерителяь . токов, величины данных сопротивлсний выбирают 102030 35 нальные элементы, сравнимые по величине с диагональными элементами и вследствие плохой сходимости процесс уравновешивания затруднен и применение прототипа в данном случае нецелесообразно, Существует ряд объектов, недопускающих применение традиционных методов контроля, в том числе короткое замыкание на выходе. Применение прототипа для данных объектов ограничено,Цель изобретения - увеличение быстродействия, достоверности и расширения области применения способа,Данная цель реализуется способом определения параметров электрических многополюсников, заключающимся в том, что формируют иэ каждой пары одноименныхзажимов объекта контроля и его модели смежные плечи Мизмерительных мостов, в измерительных диагоналях которых контролируют величину токов между общими зажимами объекта контроля и модели с общейточкой, питания первогО моста от генератора тока измеряют токи разбаланса, представляющих собой разность токов, протекающих по смежным плечам измерительных мостов. Предлагаемый способ отличается тем, что поочередно и дискретноизменяют на заданную величину величин сопротивления, включенные между одноименными зажимами объекта контроля и модели, измеряют токи разбаланса всех мостов, определяя элементы вектора раэбалансов Еи(, дискретно изменяют величины сопротивлений, включенных между (3+1)-ми зажимами объекта контроля иодного порядка с сопротивлениями плеч измерительных мостов, Существенными отличиями предлагаемого способа являются поочередное и дискретное изменение на заданную величину величин сопротивлений, включенных между одноименными зажимами объекта контроля и модели (сопротивлений, включенных в измерительные диагонали, последовательно с измерителями токов) и определение У-параметров объекта контроля решением системы матричных уравнений в 1 раОацА 1 ч,й(Ечо ., Е)-1 , . Ачмч.1 (Ер(1, . Еич 1 х Хч) 2 (У ) = В(ч) 2 (Еч Еч. (ч 1)Свойства, приобретаемые в результате введения существенных отличий, приводят к увеличению достоверности, быстродействия и расширения области применения способа, Способ позволяет с высокой достоверностью определять параметры элементов контролируемого объекта при условии, что гапдУхгапдУк. Способобеспечивает высокое быстродействие из-за отсутствия этапа уравновешивания. Число операций способа п меньше числа операций прототипа еп, где гп1 (;ля большинства обьектов контроля). Сбласть применения способа расширяется, во-первых, для объектов, у которых невозможен режим короткого замыкания, во-вторых, для объектов, представляющих собой сложную многосвязную систему с большими величинами коэффициентов взаимного влияния контуров уравновешивания,Зажимы а 1, ап обьекта контроля Х 1 и С 1, , Сп модели Кг включены в плечи измерительных мостов, образованных проводи- МОСтЯМИ 91 92, Яп 7 И ВХОДНЫМИ параметрами обьекта 1 и модели 2 в точках а 1, ., ап, С 1, . Сп, В измерительные диагонали этих мостов последовательно с измерителями токов О 1, О 2, , Оп, регистрирующих токи разбалансов Е 1, Ег, , Еп, ВКЛЮЧЕНЫ ПРОВОДИМОСТИ ЯО 1, ЯОг Яоп 8, ШУНтИРОВаННЫЕ ПРОВОДИМОСТЯМИ Яо , яоп Я, соединенными последовательно с ключами Ро, ., Роп 11. Между одноименными зажимами обьекта 1 и модели 2 вклю- ЧЕНЫ ПРОВОДИМОСТИ Яо 29 оп шунтированные проводимостями 9 о, Яоп 6, соединенными последовательно с ключами Рои., Роп 10, В питающую диагональ первого из мостов включен источник тока 3, имеющий выходную проводимость 9)14, В исходном состоянии после подключения объекта контроля Х 1 все ключи Ро;. Роп 10 (Ро Роп 11) размыкаются, От источника тока 3 подается внешнее воздействие амплитудаУ)1, После измения токов разбалансов Е 1, Ег, ", Еп замыкают(1(1 ключ Ро 10 (Ро.11) и опять из(ьеряют токи разбалансов Е 1(2), Ег(2), , Еп . Затем за мыкают ключ Ро 10 (Ро 11) и так далее, Процедура повторяется до и-го ключа. После замыкания ключа Роп 10 (РО(е 11) и изме)ения токов разбалансов Е 1", Е(п),Еп " производится обработка полученной 10 информации по алгоритму, вытекающему из следующих уравнений. В литературе известно обобщенное матричное уравнение состояния многомерного электроизмерительного устройства сравнения, заданного в системе 15 независимых узловых потенциало .ИвУив Увд Увс Ов )хд= УАВ УхА Удс ОА (1) КсУсв Усд Укс Ос ля рас матриваемого многомерного 20 устройства сравнения матрицы уравнения (1) имеют вид ,Ив =-3 и-Зв = 0; ,Хд = -Зх - 3 А = -,1 А = -)а 1, -)аг ", -ап 1т-г, ОА = Оа 1, Оа;, , Оап ОС =Ос 1, Ос:, , Осп) Т - знак транспортирования Решая уравнение (1) методом Гауса (ис ключения), получаем для вектора напряжений разбалансов Ов следующее соотношение Ов=Уив-УвсУкс Усв-(УВА-УсУкс УсА)(УхАУдсУкс.Усд)(Удв-УдсУкс Усв)1-У;СУкс 45 с - (Увд - УвсУкс Усд)(УХА - УдсУкс 1 УСА) "д- УдсУкс С: (3)Учитывая соотношения (2) после несложных преобразований получаемОв = Уи У - 2 Уи,- Укс УУи -(1- 50 Укс Уо)(УХА-УоУкс Уо) (1-УоУк )УУИ-. (Укс - (1- Укс Уо)(УХА - УоУкс Уо) (1 + УоУкс )Щ (4)Введем понятие вектора токов разбалансов 55 Е=Уи Ов. (5)Используя соотношения (2), (5), решаем уравнение (4) относительно матрицыУХ(Ук - 2 У,о - У),3 - (Ук - Уо - У)(У". 2 Уи )Е УУиЕ)=УооУо Уо(Уо.Уо.У)У 4 УкУ - У) , - (УК-У-У,)(У " -2 Уи)1742754 45 И А И =гпах1(1 п Для снижения уменьшать число не уменьшая при Е+ УУИ Е-Уо(УК - Уо-У) УУИ Е+1 + У (Ук - У - У)(6)ИЗМЕНЯЯ ВЕЛИЧИНЫ ПРОВОДИМОСтЕй до (цо;) ираз получаем еще иматричных уравнений вида (6), отличающихся от перво го и между собой, величинами параметров Уо (Уи) и величинами разбалансов Е.Решение полученной системы матричных уравнений получаем в виде01 а 9УК - 2 Уо - У) ( - (У - Уо - У)(У - 10 2 УИ ) Е+УУИ Е) ) хХ 1, Х 2, , Хп=Уо + У+ Уо(Ук - Уу - У) - Уо х (Ук - 2 Уо - У)-",- (Ук - У-Уо)(У -2 Уи )Е+УУи -1 - Уо(Ук -Уо - У) УУИ Е+1+Уо(УК-Уо-У) /, где Х = Х 1, Х;2, , Хи, 15 1=1 п, и =й 1-1. Величины параметров элементов многомерного устройства сравнения (модели измерительных плеч и т,д.), а также величи ны, на которые изменяют проводимости цо (ца), определяются исходя из следующих положений. Как указано выше, определение параметров электрического 1-полюсника осуществляется путем решения системы (7), 25 которую в общем виде можно представить как Ах= Ь, Элементы матриц А и Ь содержат погрешности, полученные в результате конеч ной точности измерения токов невязки Е 1, Е 2ЕпВлияние погрешностей матриц А и Ь на определение матрицы х параметров многополюсника оценивается соотношением 7 35 где сопб А = И А И И А И - евклидова число обусловленности матрицы А. л40 д ИАИ - ИАИ д ИЬИ - ИЫ 1ИАИИЫ 1 лд ИхИ - ИхИдх -ИхИвозмущения матриц А, Ь, х.А, Ь, х - матрицы, элементы которых несодержат погрешностей:А, Ь, х - реальные матрицыИ А И, И Ь И, И х И и т,д. - нормы матриц 50вида и, 1 а 1,1=1ошибки д х необходимо обусловленности сопбА, том нормы И А И, И Ы 1 Число обусловленности сопбА являетсяфункцией от всех параметров устройства сравнения, в том числе от сопротивлений, включенных между одноименными зажимами объекта контроля и модели (последовательно в цепях измерителей тока), а также от величин, на которые изменяют в процессе работы данные сопротивления. Величины используемых проводимостей и величины изменения этих проводимостей в процессе работы выбираются из соображения минимально возможного значения обусловленности сопс 1 А, минимального воздействия на режим работы контролируемого многополюсника, сохранения достаточно больших величин норм И А И, И Ь И, Как показали проведенные исследования, наибольшая точность способа достигается при равенстве порядков; параметров модели и предлагаемых параметров объекта контроля; величин проводимостей плеч измерительных мостов, сопротивлений, включенных между одноименными зажимами объекта контроля и модели, сопротивлений последовательно включенных в цепях измерителей токов и собственных проводимостей модели в узлах к которым подключаются данные сопротивления, Кроме того, на точность способа влияет величина, на которую изменяют величины сопротивлений, включенных между одноименными зажимами объекта контроля и модели (сопротивлений последовательно включенных в цепях измерителей токов). С ростом величины измерения, число обусловленности уменьшается по нелинейному закону, По мнению авторов наиболее оптимальный диапазон изменения величин данных сопротивлений от -50 до - 100 о от исходной величины.величины,Амплитуда источника тока )1 3 подбирается в соответствии с ограничениями на амплитуду внешнего воздействия приведенными в паспорте на изделие (объект контроля). В качестве модели объекта контроля может использоваться электрический многополюсник как с параметрами равными ожидаемым параметрам объекта контроля, так и иметь отличные параметры, Построение модели объекта контроля возможно как из пассивных, так и из активных элементов. Модель может как соответствовать проверяемому объекту, так и быть полностью отличной от объекта контроля. Например, пусть объект контроля представляет собой усилитель на одном транзисторе, Матрица проводимостей объекта контроля имеет вид- г 1 усилитель с параметрами отличными отпредполагаемых параметров объекта контроля."3 з 25 2, Способ поп.1,отличающийся тем, что поочередно и дискретно изменяют на заданную величину величины сопротивлений, включенных в измерительные диагонали, последовательно с измерителями токов, величины данных сопротивлений выбирают одного порядка с сопротивлениями плеч измерительных мостов,50 Составитель С.ТОС к и н Редактор Т,Шагова, Техред М,Моргентал Корректор Л,БескидЗаказ 2283 Тираж Подписное ВНИИПИ Государствек;ного комитета по изобретениям и открытиям при ГКНТ СССР 11335, Москва, Ж Зб, Раушскак наб., а/б Производственно-издтельский комбинат "Патент", г. Ужгород, ул.Гагарина, 101 где у 11, у 21 у 1 г, у 22 - параметры транзистора, причем параметр у 12 не учтен из-за малости его величины. В качестве модели можно выбрать аналогичный усилитель с параметрами равными предполагаемым пара метрам объекта контроля. Возможно также применение другихмоделей с матрицей проводимостей, имеющей гапдУк =. 3,Использование предлагаемого способаопределения электрических параметров 30электрических многополюсников обеспечивает следующие преимущества:1. Уменьшает время измерения У-параметров.2. Расширяет область применения известных способов для сложных многосвязныхобъектов, критичных к режиму короткого замыкания на выходе,3. Позволяет определить У-параметрыпри несовпадении структур объекта контраля и модели.Формула изобретения1. Способ определения параметровэлектрических многополюсников, заку 1 ючающийся в том, что формируют из каждой 45пары одноименных зажимов объекта контроля и его модели смежные плечи 1 чизмерительных мостов, в измерительных диагоналях которых контролируют величину токов между общими зажимами объекта контроля и модели с общей точкой питания первого моста от генератора тока, измеряют токи разбаланса, представляющих собой разность токов, протекающих по смежным плечам измерительных мостов, о т л и ч а ющ и й с я тем, что, с целью увеличения быстродействия, повышения достоверности и расширения области применения способа поочередно и дискретно изменяют на заданную величину величины сопротивлений, включенные между одноименными зажимами объекта контроля и модели, измеряют токи разбаланса всех мостов, определяя элементы вектора разбаланса Ею, дискретно изменяют величину со(противления, включенного между (+1)-ми зажимами объекта контроля и модели, измеряют токи разбалансов, определяя элементы вектора разбалансов Ем+и так далее ( = 1, 1 ч) У-параметры объекта контроля(матрицу Ух) определяют решением системы матричных уравне(ний видаОь 9 А 1 и,1 ч(Е 1 чу, Ену), .Аи 1 й,ы(Еь(, , ЕыХ(1 ч) 2(Ух) = ВМ) 2(ЕМ( ) Е 1 ч(параметры модели выбирают одного порядка с ожидаемыми параметрами объекта контроля, величины проводимостей плеч измерительных мостов и сопротивлений. включенных между объектами контроля и модели, выбирают одного порядка с собственными проводимостями модели в узлах, к которым подключаются данные сопротивления.
СмотретьЗаявка
4780259, 08.01.1990
САМАРСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ТОСКИН СЕРГЕЙ МИХАЙЛОВИЧ, АФАНАСЬЕВ АЛЕКСАНДР МИХАЙЛОВИЧ, БУРОЧКИН ИГОРЬ ВИКТОРОВИЧ
МПК / Метки
МПК: G01R 31/28
Метки: многополюсников, параметров, электрических
Опубликовано: 23.06.1992
Код ссылки
<a href="https://patents.su/5-1742754-sposob-opredeleniya-parametrov-ehlektricheskikh-mnogopolyusnikov.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения параметров электрических многополюсников</a>
Измерительная цепь цифрового моста для измерения параметров комплексных сопротивлении

Номер патента: 236630
Опубликовано: 01.01.1969
Авторы: Институт, Панков, Соболевский, Электрометрии
МПК: G01R 13/02, G01R 17/12
Метки: измерительная, комплексных, моста, параметров, сопротивлении, цепь, цифрового
...соответственно Р - Р-, витков, трансформатор напряжения 7 с обмотками 8 - 12, имеющими соответственно пг, - и;, витков, образцовые меры со 20 противления 1 г - Л с номинальными зцачен 1:ямц Р - Рг, образцовые меры емкосп Ч -2 б с номинальными значениями С, - С, генератор синусоидальцого напряжеция 27, нульиндикятор 28 и исследуем) 1 О кятш 1 ю пцдук 25 тивцосги 29 с параметрами 1.и Р,При выполнении условий Р;: (Й,. +1 В 11),Р,Лд(где 2.,з - комплексное сопротивление обмотки 12 трансформатора напряжения 7) и С,=10 С.,=100 Сз, Р,=0,1 Я,=0,01 Я;,30 Ро= - 0,1 Л-,= 0,010,;, Рз=0,1 йс= 0,01 йч, й 9=236630 11 р с д л С1 3 О 0 р с т с н и 51 Сосв:с)3 в д 1. 3 Йр 3)ас 30 В)3 с)цк)ор Е, Крсистова Тскрс; Л. К, Малова Коррск гор Н. 15,...
Способ определения величины развязки между каналами двухканальных измерительных устройств

Номер патента: 1023243
Опубликовано: 15.06.1983
МПК: G01R 19/10
Метки: величины, двухканальных, измерительных, каналами, между, развязки, устройств
...цель достигаетсятем, что согласно способу определения величины развязки между каналами двухканальных измерительных устройств, включающему предварительноеустановление в обоих каналах сигналов одинакового уровня и изменениеуровня сигнала в одном из каналов,в первом канале изменяют уровеньсигнала на фиксированную величинуКу, затем изменяют во втором канале Фазу сигнала в пределах 360 о иопределяют при этом минимальное имаксимальное значение сигнала впервом канале, находят разность 4отношений предварительно установленного значения сигнала к минимальномуи максимальному значениям сигнала впервом канале и вычисляют величинуразвязки по формулец 20К,УЬ=гО Ц, + Ко у Ь.(0 Р+1При использовании предлагаемогоспособа определения величины...
Способ определения величины развязки между каналами двухканального измерительного устройства

Номер патента: 1688187
Опубликовано: 30.10.1991
МПК: G01R 25/00
Метки: величины, двухканального, измерительного, каналами, между, развязки, устройства
...А 1, А 2 так, чтобы векторный вольтметр 7 работал в нормальном режиме, Затем вводят аттенюатором 3 ослабление К в тракт измерительного канала, уменьшая таким образом уровень сигнала примерно до уровня паразитного сигнала. При этом электрическая длина тракта осталась прежней, так как поляризационный аттенюатор не изменяет своего фазового сдвига при изменении ослабления. Изменяют положение фазовращателя 4, внося этим в тракт измерительного канала дополнительный фазовый сдвиг р, и фиксируют амплитуду сигнала, измеренного векторным вольтметром 7 и фазу на лимбе фазоаращателя 4. Снимают таким образом зависимость Аф в диапазоне углов 0-360 О. Находят минимальное и максимальное значение Л.Величину (модуль) вектора межканальной связи Рр...
Способ автоматического выбора измеряемых параметров комплексного сопротивления в универсальных экстремальных мостах переменного тока

Номер патента: 769438
Опубликовано: 07.10.1980
Авторы: Журавлев, Карандеев, Новик, Сурду
МПК: G01R 17/10
Метки: выбора, измеряемых, комплексного, мостах, параметров, переменного, сопротивления, универсальных, экстремальных
...2 раэ меньше амплитуды тока объекта измерения, то зона неопределенности будет минимальной. Покажем это. С этой целью проанализируем, как влияет на ширину эоны неопределенности погрешность формирования модуляционных токов. Будем считать, что амплитуда модуляционного тока в 42 раз меньше амплитуды тока объекта измерения. Формирование модуляционных токово 1и 1, сдвинутых по фазе на 90 не представляет трудности. Более трудной задачей является обеспечение равенства амплитуд этих токов. Поэтому рассмотрим, как будет влиять на точйость Определения сектора комплексной полуплоскости неравенство ампли+ туд модуляционных тОкОВ 1 и 1, Пусть вектор тока объекта измерения 1(см, фиг. 3) совпадает с линией раздела ОВ сектора 1 и 11. При равенстве 1 и Х...
Мост переменного тока для измерения параметров комплексного сопротивления

Номер патента: 397849
Опубликовано: 01.01.1973
Авторы: Белкинд, Шафранский
МПК: G01R 17/10
Метки: комплексного, мост, параметров, переменного, сопротивления
...которой механически связаны с переключателями регулируемых элементов, и фазочувствительные нуль-органы.В этих мостах вспомогательная ветвь снабжена дополнительным сопротивлением, подсоединена к диагонали питания измерительной мостовой цепи и образует с ее ветвью образцовых мер фазовращающий мост, с диагоналей которого снимаются напряжения, используемые для формирования опорных напряжений фазочувствительных нуль-органов, благодаря чему обеспечивается двусторонняя развязка контуров уравновешивания, но только в малом.Цель изобретения - полная развязка контуров уравновешивания.Для этого в предлагаемом мостельная ветвь подсоединена, напсогласующий каскад к образцово емого сопротивления измеритель- напряжение, служащее для форорных напряжений...
Предыдущий патент: Устройство для контроля цифровых блоков
Следующий патент: Способ определения динамической коэрцитивной силы
Случайный патент: Литая сталь