Система автоматического управления положением рабочих органов сельскохозяйственного агрегата
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки





Текст
(71) Украинский научно-исследоватинститут механизации и электрисельского хозяйства и Украинскийисследовательский институт садово(54) СИСТЕМА АВТОМАТИЧЕСКОРАВЛЕНИЯ ПОЛОЖЕНИЕМ РАОРГАНОВ СЕЛЬСКОХОЗЯЙСТВЕАГРЕГАТА(57) Изобретение относится кхозяйственному машиностроенчастности к автоматическим системдения пропашных культиваторовобрабатываемых рядков рнапример, при работе на полях пл питомника, Цель изобретения - повышение надежности системы и точности управления рабочими органами сельскохозяйственного агрегата. При касании копирами 19 шупа 7 рядка растений срабатывает один из выключателей 8 или 9, Появившийся сигнал запускает генератор 11, который запускает ждущие мультивибраторы 13 и 12. Импульс мультивибратора 12 или 13 (в зависимости от направления отклонения рабочих органов агрегата) через элемент И 14 или 15 поступает через усилители 16 или 17 на соответствующую обмотку электрогидрораспредег ителя 6 для смещения поперечной балки 3, к которой прикреплены рабочие органы агрегата. Для повышения точности обработки ждущие мультивибраторы 12 и 13 снабжены входами управления (в, г. д, е) длительностью импульса, к которым подКлючаются выходы блока адаптации. 1 з,п.ф-лы, 3 ил. ельскийфикации научно- дства ГО УП БОЧИ ННОГ сельск ию, ам вожвдол астени одово 4 Ы ОСУДАРСТВЕ ННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР 1667657 А 1Изобретение относится к сельскому хозяйству а именно к сельскохозяйственномумашиностроению, в частности к автоматическим системам вождения пропашныхкультиваторов вдоль обрабатываемых рядков растений, например при работе на полях плодового питомника,Цель изобретения - повышение надежности системы и точности управления рабочими органами сельскохозяйственногоагрегата.На фиг, 1 изображена принципиальнаясхема агрегата с электронным управляющим устройством вождения вдоль задаваемой траектории ориентации; на фиг, 2 -схема блока автоматической адаптации длявыбора продолжительности управляющегоимпульса; на фиг. 3 - временная диаграммаработы блока адаптации.Система автоматического управленияположением рабочих органов сельскохозяйственного агрегата состоит из энергетического транспортного средства (трактора) 1,неподвижного тягового бруса 2, жестко соединенного с транспортным средством, подвижного в поперечном направлении бруса3 с почвообрабатывающими рабочими органами 4, соединенного с неподвижным брусом 2 рычажным механизмом игидроцилиндром 5, электроуправляемого ЗОтрехпозиционного гидрораспределителя 6,двустороннего щупа 7 для обнаружения растения с выключателями 8 и 9 электрическихсигналов, электронного управляющего устройства системы и блока адаптации.Электронное управляющее устройствосодержит элемент ИЛИ 10, генератор 11прямоугольных импульсов, два регулируемых ждущих мультивибратора 12 и 13 с управляемой шириной импульса на выходе, 40два логических элемента И 14 и 15 с тремявходами каждый, два усилителя 16 и 17 мощности, элемент И-НЕ 18.Регулируемый ждущий мультивибратор12, кроме входа для подачи основного сигнала имеет также вход "в", при подаче сигнала на который осуществляетсяувеличение ширины выходного импульса, ивход "г", при подаче сигнала на которыйосуществляется снижение ширины этого 50импульса. Аналогично мультивибратор 13имеет вход "д" на увеличение ширины выходного импульса и вход "е" на снижение.его ширины,Щуп 7 состоит из двух копиров 19, 55установленных шарнирно и независимос помощью параллелограммной подвески на центральном стержне щупа 7, ограничительного упора 20 и разводящихпружин 21,Питание электрической части системы осуществляется от источника 22, Гидравлическая часть системы питается от гидросистемы, в которую входят насос 23, бак 24 и предохранительный клапан 25.Блок адаптации (фиг, 2) содержит два элемента 26 и 27 задержки, два первых ждущих мультивибратора 28 и 29, четыре элемента И 30-33, четыре вторых ждущих мультивибратора 34 - 37,Выключатель 8 сигналов (см. фиг, 1) соединен с элементом И 14, э выключатель 9 - с элементом И 15. Эти выключатели соединены также с элементом ИЛИ 10 и элементом И-НЕ 18. Кроме того, выводы "а" и "б" выключателей 8 и 9 соединены с двумя входами блока адаптации(см, фиг. 2). Выход элемента И - НЕ 18 подключен к элементам И 14, 15, а выход элемента ИЛИ 10 - к генератору 11. Элементы И 14, 15 соединены также с генератором 11 через регулируемые мультивибраторы 12, 13. Выходы элементов И 14, 15 через усилители 16, 17 мощности соединены с катушками управления гидрораспределителя б.В гидравлической части системы гидро- цилиндр 5 соединен с гидрораспределителем б.Элементы блока поисковой адаптации (см. фиг, 2) соединены с выключателями 8 и 9 через вводы "а" и "б". При этом выключатель 8 соединен с элементами И 30, 33 непосредственно, а с элементами ЗО, 32 через элемент 26 задержки и мультивибратор 28, выключатель 9 соединен с элементами 31 и 32 непосредственно, а с элементами 31 и 33 - через элемент 27 задержки и мультивибраор 29. В результате осуществляется соединение выключателей 8 и 9 с элементами 30-33 во всех возможных комбинациях. Выходы элементов И 30-33 соединены через мультивибраторы 34-37 с входами "в", "г", "д" и "е" регулируемых ждущих мультивибраторов 12 и 13,Система работает следующим образом, При движении культиватора вдоль рядков обрабатываемых растений копиры 19 щупа 7 находятся между обрабатываемыми рядками, но не касаются их, так как их перемещение к рядку ограничивается упором 20, к которому пружины 21 прижимают элементы подвески этих копиров, Регулировкой положения копиров 19 создается минимально допустимая для обрабатываемых растений зона нечувствительности, Если культиватор смести гся относительно рядка, соответствующий копир 19 коснется стебля растений, переместится на пграллелограммной подлеске, на которой он уста 1667657новлен, и замкнет при этом связанный с ним выключатель, Появившийся при этом электрический сигнал попадает на генератор 11 и на регулируемые ждущие мультивибраторы 12 и 13. В результате на один из входов элементов И 14 и 15 поступают импульсы, ширина которых зависит от настройки мультивибраторов 12 и 13. Импульсы могут пройти только через один из элементов И 14 или 15, а именно через тот, к которому поступает непосредственно сигнал от выключателя, Так, если замкнется выключатель 8, импульсы появятся только на выходе элемента И 14, при замыкании выключателя 9 появится импульс на выходе элемента И 15, После усиления сформированный импульс проходит через соответствующую катушку гидро- распределителя 6, Осуществляется подача порции рабочей жидкости от насоса 23 в одну из полостей гидроцилиндра 5 и подвижный брус 3 с почвообрабатывающими рабочими органами 4 отводится от обрабатываемого рядка растений,Если оба копира 19 одновременно коснутся смежных рядков растений, что может произойти ввиду встречного искривления смежных рядков, наклонов растений в сторону междурядья или по другим причинам, сигнал логической "1" на выходе элемента И-НЕ 18 изменится на сигнал погического "0", Поэтому на выходах эпемен ов И 14 и 15 электрического сигнала уже не будет. В противнол случае были бы запитаны обе катушки гидрораспределитепя 6, что является недопустимым режимом работы, Если выключатели 8 и 9 отключены ипи включен только один из них, на выходе элемента И-НЕ 18 фоомируется логическая "1", чем исключается влияние этого элемента на работу эпементов И 14 и 15,При изменениях рабочей скорости агрегата или технического состояния отдельных узлов может понадобиться изменение поодолжительности импульса, подаваемого на гидрораспредепитепь 6, Для этого должна быть изменена регулировка одного или обоих мупьтивибрэторов 12 и 13. Такую пере- регулировку осуществляет блок адаптации систе лы,При замыкании, например, выключателя 8 поступает сигнал на элементы И 30 и 32, Одновременно сигнал выключателя 8 после прохождения через элемент 26 и мультивибратор 28 преобразуется в сигнал продолжительности г, запаздывающий по отношению к моменту замыкания выключателя 8 на время т 0, Величичы т 0 и т выбираются так, что при оптимальном значении импульса 1 о от мупьтивибраторъ 12 или 1 Э сигнал тв от выключателя 8 по продолжи 5 10 тельности меньше т 0, а последующий за ним сигнал от выключателя 9, появляющийся от соприкосновения с противоположным рядком, поступает после интервала времени не менее то+т, В этом случае на выходах элементов 30 - 33 сигналов не будет. Поэтому изменение настройки мультивибраторов 12 и 13 не произойдет,Если продолжительность импульса 1 о на выходе регулируемых мультивибраторов 12 и 13 превышает оптимальное значение, управление может осуществляться в автоколебательном режиме, После касания одного из рядков подвижный брус смещается в сторону от этого рядка на величину большую, чем требуется, Поэтому щуп 1 сразу и входит в зону нечувствительности противоположного рядка. Вновь поступает сигнал на поперечное перемещение подвижного бруса уже в противоположную сторону и т.д.Если продолжительность импульса 10ниже оптимального значения, подвижный брус очень медленно выходит из эоны нечувствительности рядка, с которым соприкоснулся щуп, Так, если установленная на регулируемом мультивибраторе 12 продолжительность импульса то превышает оптимальное значение дпя условий, при которых работает агрегат, после касания, например, 30 правого рядка и замыкания выключателя 8подвижный брус 3 ложет быть смещен е сторону противоположного левого рядка с перерегулированием, Поэтому противоположная сторона щупа 7 соприкоснется с противоположным рядком, замкнув при этом выключатель 9. В результате через интервал времени гв 9 формируется импульс тд (фиг, За), Если гвато+т, формируется импульс на выходе элемента И 32 и через вы ход г" мульгивибратора 36 передаетсякоманда на укорочение и.импульса 10 на выходе регулируемого мультивибратора 12 до значения тоАналогично, если после касания левоорядка щуп 7 за промежуток времени менеегот коснется правого рядка ( фиг, 3 в), фор.мируется импульс на выходе элемента И 33 и через выход "е" м,пьтивибратора 37 передается команда на укорочение импульса 50 то на выходе регулируемго лпьтивибратора 13 до значения %210.В случае, когда продопжигельность им.пульса то на выходе регулируемого мультивибратора 12 оказывается ниже оптимального значения дпя условий, при которых работаег агрегат, после касания, например, правого рядка импульс тв на выходе выключателя 8 ока кется больше со (фиг. Эб), В этом случае на влоле элемента И 30 формируется импульс. и через выход "в"мультивибратора 34 передается команда наувеличение длительности импульса на выходе регулируемого мультивибратора 12 дозначения 11 ьАналогично, если импульс т 9 на выходевыключателя 9 окажется больше то (фиг. Зг),формируется импульс на выходе элементаИ 31, который через выход "д" мультивибратора 35 передается на мультивибратор12, При этом осуществляется перестройка 10регулируемого мультивибратора 12 на выдачу импульса продолжительностью 110,Таким образом, осуществляется точноекопирование рядков обрабатываемых растений, что позволяет вести обработку с минимальной для данных растений защитнойзоной. Этим снижаются затраты ручноготруда при последующих обработках, чем достигается экономический эффект,20Формула изобретения 1. Система автоматического управления положением рабочих органов сельскохозяйственногоо агрегата, содержащая неподвижный тяговый брус для жесткого соединения с энергетическим транспортным средством, подвижный в поперечном направлении брус с рабочими органами, соединенный с неподвижным брусом через З 0 рычажный механизм, и гидроцилиндр с управляющим электрогидрораспределитвлем, электрически связанным с выходами блока управления, на вход которого через схему ИЛИ подключены первый и второй З 5 выключатели двустороннего шупа, о т л и- ч а ю щ а я с я тем, что, с целью повышения надежности в работе, в блок управления введены генератор импульсов, первый и второй ждущие мультивибраторы, первый и второй элементы ЗИ, элемент И-НЕ и два усилигеля мощности, при этом каждый из выключателей двустороннего шупа соединен с первым входом соответствующих элементов ЗИ, к вторым входам которых подключены соответственно выходы первоо и второго ждущих мультивибраторов, а к третьим - выход элемента И-НЕ. входы которого соединены с первым и вторым выключателями двустороннего щупа, при этом выход элемента ИЛИ через генератор прямоугольных импульсов связан с входами запуска обоих ждущих мультивибраторов, а выходы элементов ЗИ через усилители мощности связаны с электромагнитами электрогидрораспределителя,2. Система по и, 1, о т л и ч а ю щ а яс я тем, что, с целью повышения точности управления рабочими органами сельскохозяйственного агрегата, снабжена блоком поисковой адаптации, который включает два элемента задержки, шесть ждущих мультивибраторов и четыре элемента И, при этом выключатели двустороннего шупа подключены к четырем элементам И непосредственно и через цепочку, каждая иэ которых состоит из последовательно соединенных элемента задержки и соответственно третьего или четвертого ждущего мультивибратора, а выходы элементов И соединены через пятый восьмой ждущие мультивибраторы соответственно с входами управления длительностью импульсов первого и второго ждущих мультивибраторов.1667657 БаиОгфа юл гзчт Заказ 2588 Тираж 398 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ С 113035, Москва, Ж, Раушская наб., 4/5 гарина, 10 оизводственно-издательский комбинат "Патент", г, Ужго Составитель Б. Кузьмичедактор В, Петраш Техред М. Моргентал Корректор О, Кравцо
СмотретьЗаявка
4645101, 01.02.1989
УКРАИНСКИЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ МЕХАНИЗАЦИИ И ЭЛЕКТРИФИКАЦИИ СЕЛЬСКОГО ХОЗЯЙСТВА, УКРАИНСКИЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ САДОВОДСТВА
БОРОШОК ЛЕВ АБРАМОВИЧ, ФРЫШЕВ СЕРГЕЙ ГЕОРГИЕВИЧ
МПК / Метки
МПК: A01B 41/06
Метки: агрегата, органов, положением, рабочих, сельскохозяйственного
Опубликовано: 07.08.1991
Код ссылки
<a href="https://patents.su/5-1667657-sistema-avtomaticheskogo-upravleniya-polozheniem-rabochikh-organov-selskokhozyajjstvennogo-agregata.html" target="_blank" rel="follow" title="База патентов СССР">Система автоматического управления положением рабочих органов сельскохозяйственного агрегата</a>
Устройство для формирования сигнала, соответствующего середине интервала следования серии импульсов или огибающей импульса

Номер патента: 552684
Опубликовано: 30.03.1977
Авторы: Барденштейн, Пинчук
МПК: H03K 5/00
Метки: импульса, импульсов, интервала, огибающей, середине, серии, сигнала, следования, соответствующего, формирования
...элемент 21 - 2 содержит каскад совпадения 5 и формирователь 6, соединенные последовательно (фиг. 2).5 Устройство для формирования сигнала, соответствующего середине интервала следования серии импульсов или огибающей импульса работает следующим образом.Сигнал огибающей после дифференцпрова- О нця и формирования в формирователе пм 552684йульсов 1 в виде двух граничных импульсов подводится к линии задержки 3, от отводов которой сигнал подводится к входам логических элементов 2 - 2, К другим входам логических элементов 2 - 2 подается сигнал с выхода формирователя импульсов 1. В момент совпадения во времени первого импульса, снимаемого с соответствующего отвода линии задержки 3 и второго импульса на ее входе, с соответствующего...
Устройство для селекции по длительности импульсов телевизионного сигнала

Номер патента: 1166289
Опубликовано: 07.07.1985
Автор: Круглов
Метки: длительности, импульсов, селекции, сигнала, телевизионного
...И 9.Устройство для обработки импульсных видеосигналов работает следующим образом.Пусть на вход устройства действует импульсный видеосигнал, соответствующий изображению двухградационного объекта, показанного условно на фиг. 2 а, В этом случае в течение трех последовательных строк разложения, задаваемых строчными синхроимпульсами (фиг. 2 б), на входе устройства присутствует импульсный видеосигнал, представленный на фиг. 2 в. При этом длительность первого импульса т больше пороговой величины, задаваемой временем задержки 1 змпервой линии 1 задержки, в результате чего указанный импульс проходит на выход устройства следующим образом: прямой (фиг. 2 в) и задержанный (фиг. 2 г) импульсы, поступающие на входы первого элемента И 2, вызывают...
Устройство для измерения отношения частот следования импульсов бинарного сигнала и помехи

Номер патента: 366579
Опубликовано: 01.01.1973
Автор: Лугов
МПК: H03K 25/02
Метки: бинарного, импульсов, отношения, помехи, сигнала, следования, частот
...других п схем И 10 соединены с выходом делителя 5, вторые входы 2 п схем И 9 - 10 соединены попарно между собой и с выходами п триггеров 11. Выходы 2 п схем И 9 - 10 соединены с входами п триггеров 11 ц с 2 п входами схемы ИЛИ 12, с выхода которой подается сброс на триггеры делителей 4 и 5,Устройство работает следующим образом. На один вход распределителя импульсов 1 с г выходами подается периодическая последовательность импульсов с частотой гР(Ь) (Р(Ь) - известная частота выборки случайного или периодического импульсного бинарного сигнала). На другой вход распределителя 1 подается аддитивная смесь импульсов сигнала и помехи со средними частотами следования Хс и Хп соответственно.Если на г выходе распределителя импульсов 1...
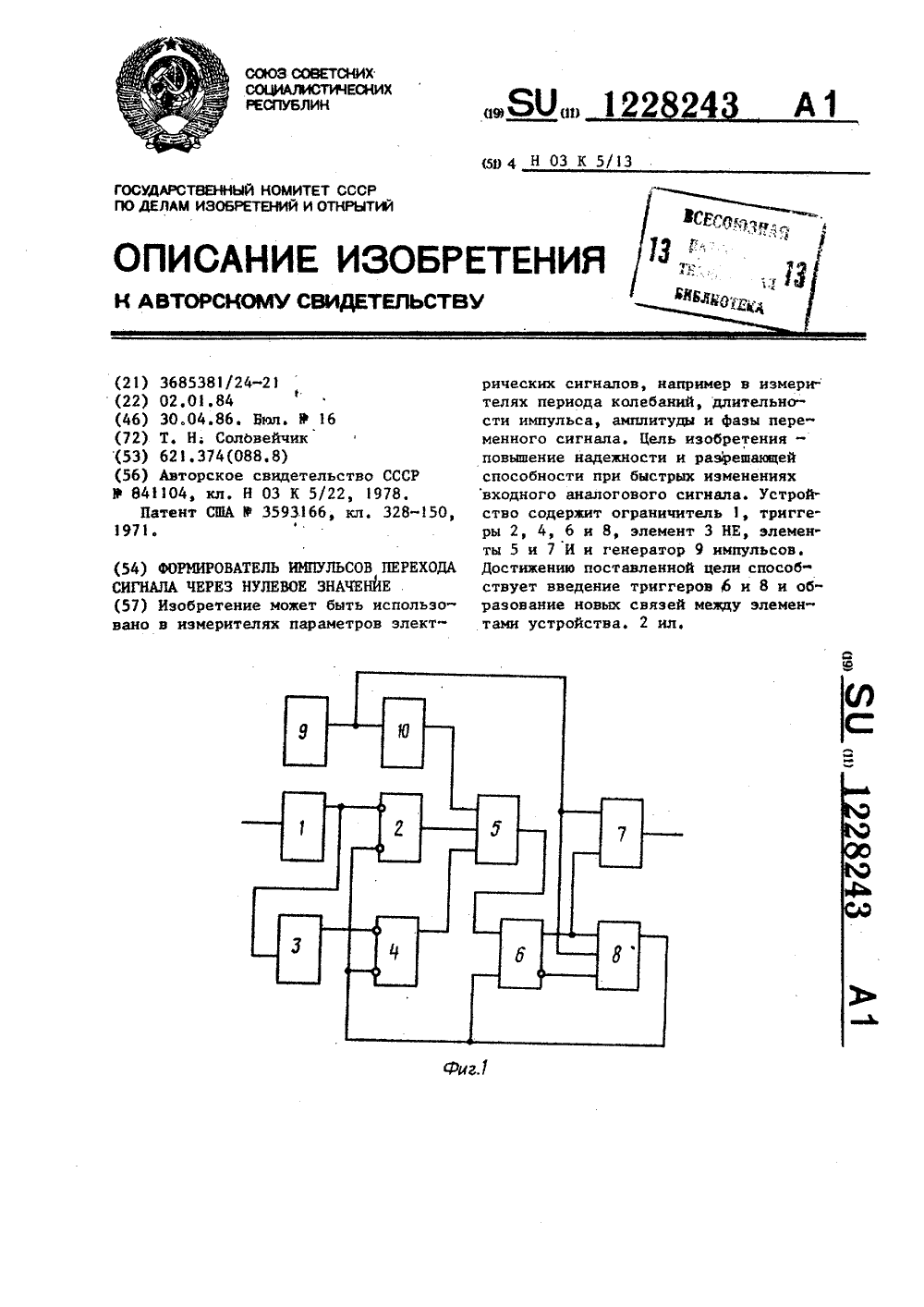
Формирователь импульсов перехода сигнала через нулевое значение
Номер патента: 1228243
Опубликовано: 30.04.1986
Автор: Соловейчик
МПК: H03K 5/13
Метки: значение, импульсов, нулевое, перехода, сигнала, формирователь
...формирователя триггеры 2, 4 и 6 находятся в нулевом состоянии, так как на входы сброса этихтриггеров подается нулевой потенциалс прямого выхода триггера 8, который,в свою очередь, перед началом работыпринудительно установлен в нулевоесостояние (шина установки не показана), Первым импульсом ат генератора импульсов высокой частоты 9(фиг. 2 я)триггер 8 устанавливается в единичноесостояние (фиг. 2 л) и на входы сбросатриггеров 2, 4 и 6 подается единичныйпотенциал, что дает воэможность управлять этими триггерами по входам установки, при этом триггер 2 сразу встает в единичное состояние (фиг. 2 е),так как на ега входе установки - нулевой потенциал (фиг. 2 В), а триггер4 встает в единичное состояние (фиг. 2 ж), когда появляется фронт(перепад)...
Устройство для селекции по длительности импульсов телевизионного сигнала

Номер патента: 1238224
Опубликовано: 15.06.1986
Автор: Круглов
Метки: длительности, импульсов, селекции, сигнала, телевизионного
...сигнала работает сле- дующим образом.Пусть на входе устройства присутствует импульсный видеосигнал, соответствующий двухградационному изображению . объекта, показанного на фнг, 2 а, В этом случае в течение трех последовательных строк разложения, задаваемых строчными синхроимпульсами (фиг. 2 б), на входе устройства и на выходе первой линии задерхски 1 (фнг, 2 в) присутствует импульсный видеосигнал, При этом длительность первых двух импульсов т и т 2 меньше пороговой величины тп, задаваемой первой линией за;дерхски 1, а длиф тельность третьего импульса. тз)ти. В результате на первый вход (вход установки в единицу) первого триггера 4 через первый элемент И 2 проходит только третий импульс, и на выходе первого триггера 4...
Предыдущий патент: Орудие для извлечения корневищ сорняков из почвы
Следующий патент: Камнеподборщик
Случайный патент: Устройство к токарному станку для накатки канавок на трубах