Способ автоматического управления процессом драгирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1609877
Авторы: Багаутинов, Лыков


Текст
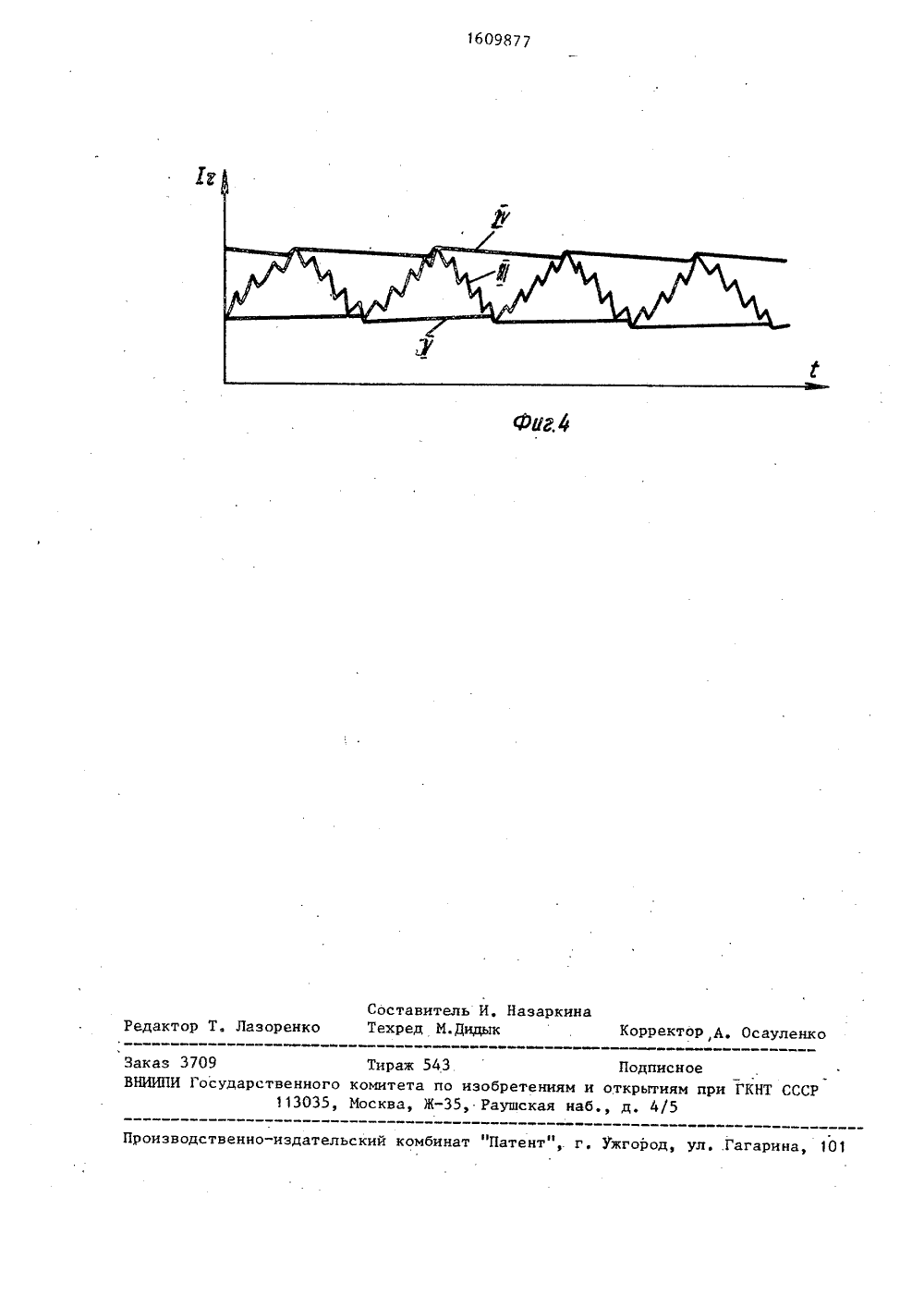
(71) Научно-производственное объединение "Сибцветавтоматика" и Свердловский горный институт им. В,В. Вахрушева(56) Авторское свидетельство СССР 9 682604, кл. Е 02 Р 3/ 16, 1977.Авторское свидетельство СССР Р 723040, кл, Е 02 Г 3/00, 1977. (54) СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ДРАГИРОВАНИЯ (57) Изобретение относится к управленню горными машинами, в частности драгами. Цель - повышение производительности драгирования. Способ основан на определении датчиком 1 тока текущего значения тока нагрузки черпаковой цепи и сравнении его в сумматоре 3 с заданным задатчиком 4 тока (сигнал Ь 1 ). Дополнительно определяют усредненную во времени амплитуду переменной составляющей тока нагрузки черпаковой цепи в фильтре 2 ( + 1), Затем сравнивают в сумма-торе 5 полученные сигналы Д 1 и+ Ь 1 и по результатам сравнения вырабатывают сигнал на изменение скорости боковой подачи драги, 4 ил.с45 Изобретение Относится к управлениюработой горных машин и может найтиприменение при управлении процессомдрагирования,Целью изобретения является повышение производительности драгирования.Изобретение позволяет исключитьколебания скорости боковой подачи,возникающие от действия переменнойсоставляющей тока нагрузки приводачерпаковой цепи. Скорость боковойподачи остается постоянной при постоянном среднем значении тока нагрузки, колебания тока нагрузки устанавливаются равными значению пороговогосигнала, не превышают этого порогаи потому не изменяют сигнала управления приводом боковой подачи.Поскольку скорость черпания постоянная, то при постоянстве скорости боковой подачи не нарушается соотношение скоростей. Параметры стружки при этом сохраняются постояннымии близкими к Оптимальным при которых энергетические затраты и, значит,ток нагрузки черпаковой цепи минимальны. При колебаниях боковой скорости и параметров стружки, отклоняющихся от оптимального значения, возрастает ток нагрузки черпаковой цепи, что вызывает снижение скоростибоковой подачи и, следовательно, про"изводительности драгирования.На фиг, 1 представлена функциональная схема устройства, реализующегопредлагаемый способ; на фиг,2 -график зависимости Чр = Г(1); нафиг. 3 - принципиальная электрическая схема устройства, реализующегопредлагаемый способ без задатчикаи датчика тока; на фиг, 4 - график,иллюстрирующий работу фильтра переменной составляющей тока нагрузки.Устройство, реализующее способ(фиг1), содержит датчик 1 токанагрузки привода черпаковой цепи(например, трансформаторный), выходкоторого соединен с фильтром 2 переменной составляющей тока нагрузкипривода черпаковой цени и с входомпервого сумматора 3, другой вход которого соединен с задатчиком 4 токанагрузки (например, потенциометрическим). Выход сумматора 3 соединен свходом второго сумматора 5, другой 55вход которого соединен с выходомфильтра 2 переменной составляющейтока нагрузки привода черпаковой. цепи, выход второго сумматора 5 соединен с входом электропривода б лебедокносовых каналов,Сумматор 3 выполнен на операционном усилителе 7, фильтр 2 переменнойсоставляющей - на операционных усилителях 8 и 9, второй сумматор 5 - наоперационных усилителях 10, 11 и 12,Способ управления процессом драгирования осуществляется следующим образом.Непрерывно измеряют величину исходного сигнала, получаемого с датчика1 тока, характеризующего нагрузкучерпаковой цепи драги, и сравниваютее ткущее значение 1 с выходным сигналом 1 задатчика 4 тока с помощьюсумматора 3, Одновременно сигнал 1преобразуют с помощью фильтра 2 вусредненную во времени амплитуду переменной составляющей тока нагрузкичерпаковой цепи, которую сравниваютс результативным сигналом сравнениятекущего значения тока нагрузки черпаковой цепи с заданным с помощьюсумматора 5, и в зависимости от величины и знака отклонения изменяют скорость боковой подачи драги Ч, Например, при превышении текущим значением тока нагрузки Тг заданного 1 навеличину Ь 1 Т с выхода сумматора 3 получают сигнал соответствующей амплитуды отрицательной полярности, который превышает не изменившийся пороговый сигнал ЬТ с выхода фильтра 2.Оба названных сигнала сравниваютна сумматоре 5 интегрального типа и,поскольку сигнал отрицательной полярности преобладает, снижают скорость,боковой подачи Чр (кривая 1 нафиг. 2) до тех пор, пока нагрузкачерпаковой цепи не снизится до заданной. В том случае, когда нагрузкачерпаковой цепи 1 р ниже заданной нату же величину ДТ., на выходе сумматора 3 получают сигнал положительной полярности, который превышаетне изменившийся пороговый сигнал ДТс выхода фильтра 2, Оба указанныхсигнала также сравнивают на сумматоре5 интегрального типа. и, поскольку сигнал положительноЙ полярности преобладает, повьппают скорость боковойподачи Ч (кривая 11 на фиг. 2) дотех пор, пока нагрузка черпаковойцепи не повысится до заданной, Приувеличении крепости породы и при неизменном среднем значении Тг воэрас30 драги. 1609877тает амплитуда переменной составляющейтока нагрузки, соответственно на такую же величину увеличиваются, 61 иЬ , в результате чего скорость боковой подачи 1 не изменяют.Работа устройства, реализующегопредлагаемый способ, заключается вследующем.Исходный сигнал 1 в фильтре 2сначала преобразуется в амплитудывысокого (кривая 17 на Аиг. 4) и низкого (кривая Ч на Аиг. 4) уровней,при этом через диод 21 конденсатор13 заряжается мгновенно до амплитудывысокого уровня исходного сигнала,а разряд происходит медленно черезрезистор 14 суммирующего (операционного) усилителя 8. Конденсатор 15 заряжается медленно через диод 1 б и 20резистор 17, когда исходный сигнал 11.имеет высокий уровень напряжения,а разряжается мгновенно до самогонизкого уровня исходного сигнала через диод 18. Сигнал с конденсатора 2515 подается через входной резистор19 на неинвертирующий вход усилителя 8. На выходе усилителя 8 формируется усредненный во времени с помощью конденсатора 20 сигнал, пропорциональный амплитуде переменнойсоставляющей исходного сигнала, который инвертируется усилителем 9 дляполучения противоположного знака.Сигналы с выходов усилителей 8 и 9являются пороговым значением + 135величины отклонения текущего токанагрузки 1 (кривые 1 и 11 на Лиг,2)от заданного значения нагрузки 1черпаковой цепи.Сравнение сигналов на сумматорах403 и 5 и обработка скорости боковой,подачи 7 происходят аналогично описанному вьппе. В том случае, когдасигнал задатчика тока 1 вьппе сиг/нала с датчика тока 1на величинуД 1 на выходе первого сумматора 3сигнал положительной полярности пре, вышает пороговый сигнал Й 1 отрицательной полярности на входе операци 50 онного усилителя 9, выходной сигнал которого интегрируется интегратором на операционном усилителе 11 в сторону увеличения на его выходе сигнала положительной полярности. Скорость боковой подачи возрастает по кривой 11 (Лиг. 2) до тех пор, пока нагрузка черпаковой цепи не возрастет до заданной. В противном случае, когда сигнал задатчика тока ниже сигнала с датчика тока, на выходе первого сумматора 3 сигнал отрицательной полярности превышает пороговый сигнал положительной полярности на выходе операционного усилителя 10, выходной сигнал которого уменьшает сигнал на выходе интегратора 11, Скорость боковой подачи падает по кривой 1 (Фиг. 2) до тех пор, пока нагрузка черпаковой цепи не снизится до заданной.В том случае, когда сигнал А 1 . не превьппает сигнала К 1, на выходах операционных усилителей 9 и 10 сигналы равны О, на выходе интегрирующего усилителя 11 сигнал не меняется, следовательно, скорость боковой подачи остается постоянной. Формула изобретения Способ автоматического управления процессом драгирования, заключающийся в определении текущего значения тока нагрузки черпаковой цепи, сравнении его с заданным и выработке управляющего сигнала на изменение скорости боковой подачи драги, о т л ич а ю щ и й с я тем, что, с целью повышения производительности драгирования, дополнительно определяют усредненную амплитуду переменной составляющей тока нагрузки черпаковой цепи, сравнивают ее с результативным сигналом сравнения текущего и заданного значений тока нагрузки черпаковой цепи и по результату сравнения изменяют скорость боковой подачиазорен одпис ГКНТ СССР зоб е ауш.Гагарина, 1 О роизводственно-издательский комбинат "Патент",. г. Ужгор Заказ 3709 ВНИИПИ Гос Тираж 543 твенного комитета по 113035, Москва, Ж
СмотретьЗаявка
4467401, 17.06.1988
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "СИБЦВЕТМЕТАВТОМАТИКА", СВЕРДЛОВСКИЙ ГОРНЫЙ ИНСТИТУТ ИМ. В. В. ВАХРУШЕВА
ЛЫКОВ НИКОЛАЙ БОРИСОВИЧ, БАГАУТИНОВ ГЕННАДИЙ АТРАХМАНОВИЧ
МПК / Метки
МПК: E02F 3/16
Метки: драгирования, процессом
Опубликовано: 30.11.1990
Код ссылки
<a href="https://patents.su/5-1609877-sposob-avtomaticheskogo-upravleniya-processom-dragirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ автоматического управления процессом драгирования</a>
Устройство для защитного отключения шахтной тяговой сети постоянного тока с цикличным прерыванием цепи нагрузки

Номер патента: 674143
Опубликовано: 15.07.1979
Авторы: Батасов, Животовский, Ликаренко, Пилипенко
МПК: H02H 3/16
Метки: защитного, нагрузки, отключения, постоянного, прерыванием, сети, тяговой, цепи, цикличным, шахтной
...дат" 30 чик оперативного тока 6, вйполненйцй в .вйце резистора, между прямым и обратным проводом тяговой сети, В ка честэе источника оперативного тока может быть использован мостовой эйпрямитель,питающийся от сети переменного тока. Чувствительный орган защитного устройства 7 состоит из источ,- ника питания 8, выход которого соединен совходами питания Формирователя селекторных импульсов 9, селектора оператиэного тока 10 и релейного эле-. мента 11. Первый вход селбктора сщеративного-тока 10 соединен с датчй+ ком. оперативного тока б, второй еговход соединен через Формирователь се-. 45 лекторных импульсов 9 с датчикой на- личия паузы в силовом питании сетй 12, выполненным в виде последовательносоединенных потенциометра 13 и диода 14 и...
Устройство для защиты от перенапряжений параллельных цепей нагрузки постоянного тока

Номер патента: 1206870
Опубликовано: 23.01.1986
Авторы: Капелинский, Фесенко
МПК: H02H 3/20
Метки: защиты, нагрузки, параллельных, перенапряжений, постоянного, цепей
...нагрузки 1 и измерительнойцепочки 4-5, Через последовательносоединенные выходной каскад 8 .реле7 и третий резистор 9 средняя точкафильтра 10 соединена с первым выводом 2 генератора 3. Вход реле 7 сое,динен с анодом стабилитрона б, аплюсовый и минусовый выводы питания реле 7 соединены соответственно со средней точкой фильтра 10 ис первым выводом 2 генератора 3.Фильтр 10 снабжен блокирующим диодом 14, включенным параллельнодросселю 2 встречно току генератора 3. Нагрузки 1 подключены к первому выводу 2 генератора 3 черезкоммутаторы 15-17. К выходам генератора 3 подключен регулятор 18 напряжения, соединенный с обмоткой19 возбуждения генератора, в состав которого входит также выпрямительный блок 20,Устройство работает следующим...
Устройство для защиты от перенапряжений параллельных цепей нагрузки постоянного тока

Номер патента: 1494099
Опубликовано: 15.07.1989
Авторы: Доценко, Назаров, Соколов
МПК: H02H 3/20
Метки: защиты, нагрузки, параллельных, перенапряжений, постоянного, цепей
...7 до определенной величины спмается сигнал в.чючеия с входного каскада 9 транзисторного реле Я, Реле 8 выключается и размыкает цепь включения низкоомного резистора 11, В случае, еслизд счет энергии, накопленной н индуктивном сопротивлении обмоток генератора 1 напряжение на нагрузкеснова возрастает до величины, прикоторой срябдтьвдет транзисторноереле Я, процесс повторяется до техпор, пока нся энергия перенапряжения не рассеется н цепи: низкоомныйрезистор 11 - выходной каскад 10транзисторного реле 8,При возникновении перенапряженийодновременно с включением входногокаскада 9 транзисторного реле 8здкрындется каскад 4 управления интегрирующей цепью 15, Разрядный резистор 1 б отключается от конденсатора 17, Конденсатор 17 начинает...
Устройство для автоматического регулирования нагрузки черпаковой цепи драги

Номер патента: 682604
Опубликовано: 30.08.1979
Авторы: Аптекман, Бургин, Ермоленко, Пономарев, Пуценко
МПК: E02F 3/16
Метки: драги, нагрузки, цепи, черпаковой
...множительно-делительного устройства 4. Другой вход-сомножитель устройства 4 соединен с выходомдатчика тока 9 двигателя 7, включенногов якорную цепь этого же двигателя, а выход устройства 4 подсоединен ко второмувходу устройства сравнения 2. бУстройство в статике описывается следующей системой уравненийгде е - ошибка регулирования;1,1 ОО - сигналы задания и обратной связи;1 1, - ток двигателя черпаковойцепи и ток его холостого хода;У - выходное напряжение усилителя 3;К, Кь и Кю - статические передаточныекоэффициенты соответственно усилителя 3, электропривода лебедок носовых канатов 5 и черпающего комплекса 6;Р; и Р, - скорости бокового перемещения и черпания,Решение системы уравнений (1) при пренебрежении 1 Х относительно боковой скорости...
Способ формирования сигнала скорости изменения регулируемой координаты

Номер патента: 204420
Опубликовано: 01.01.1967
Автор: Фотин
МПК: G05B 11/00
Метки: изменения, координаты, регулируемой, сигнала, скорости, формирования
...5 с разделенными каналами пропорциональной и интегральной составляющихвыходного сигнала.5 Входной сигнал нелинейного ограсравнивают с интегральной сост ющей еговыходного сигнала, результат с ния ограничивают и затем преобразуют ропорционально-ннтегральному закону.О Входным сигналом Ьв, для нелинейногоограничителя является задание, предназнаное для передачи регулятору нагрузки, аходным Увы, - сумма сигналов на входе1 вх и И ВЫХОДЕ Ьвых и ИНтЕГраторавы. -вх. в +вых, вВ установившемся режиме /в,и =О.Соотношение сигналов в зависимости от величины изменечия задания Л Свх и установкиограничителя 5, (/огр устанавливается следующим образом.1 1 ри - вх. С огр.1 вх. и - 1 вв.СЛСДОЬатЕЛЪНО, Л вых. =1 вв.даточная функция...
Предыдущий патент: Способ снижения воздействия деформаций земной поверхности на фундаменты зданий, сооружений при подработке
Следующий патент: Экскавационная машина
Случайный патент: Холодильная установка