Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
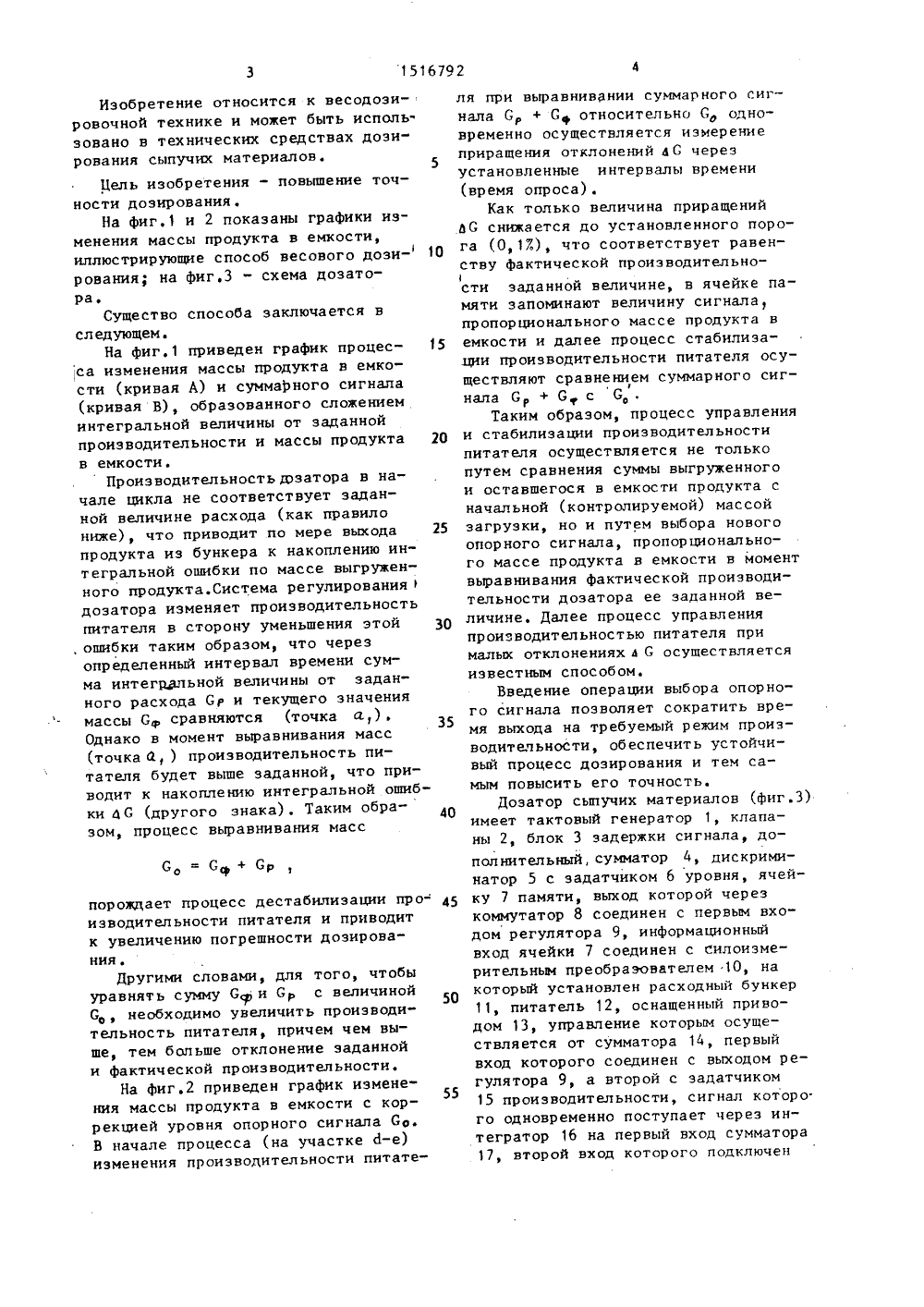
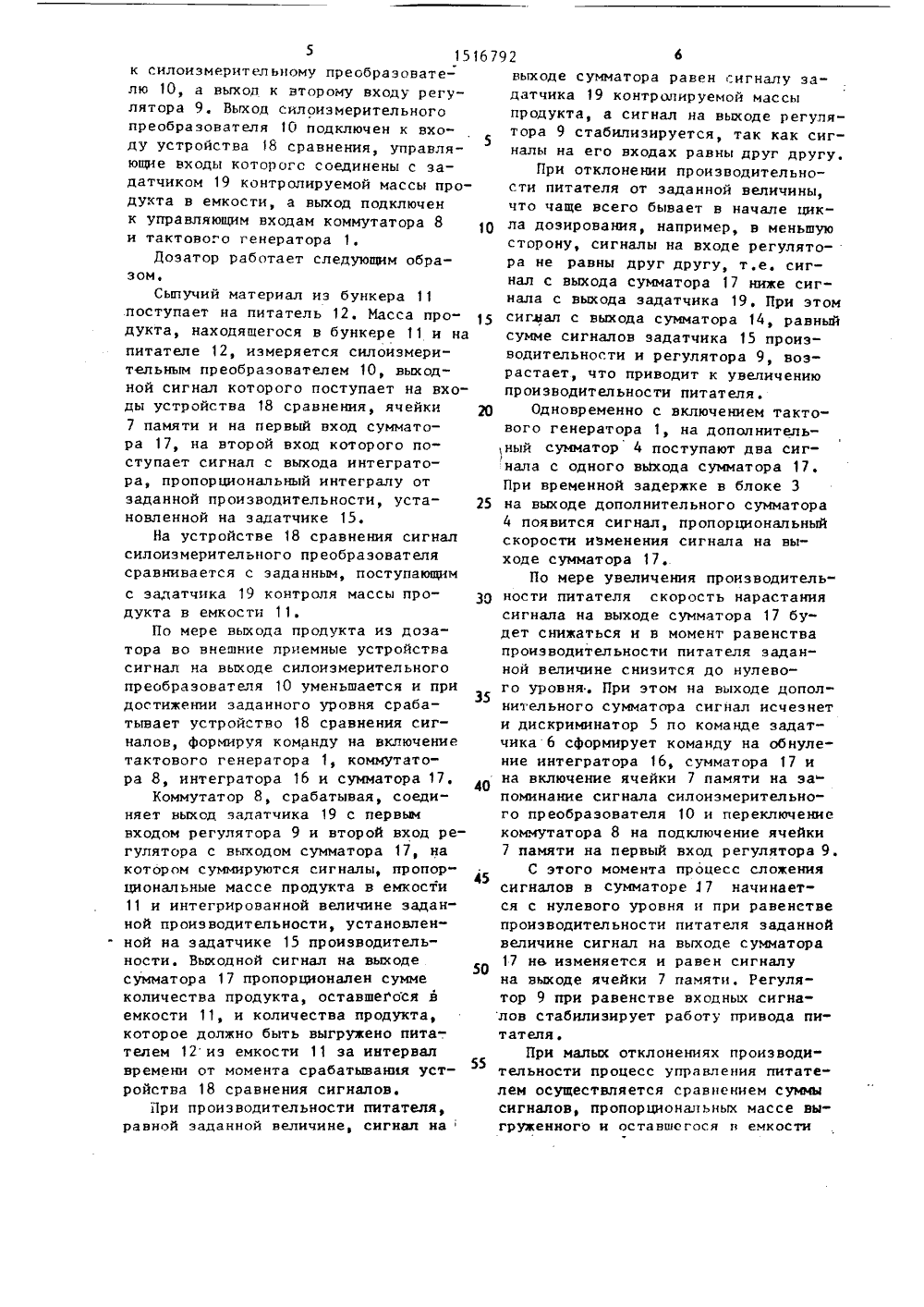
(5 и 4 С 01 С 13/00 ОПИСАНИЕ ИЗОБРЕТЕНИЯК А ВТОРСКОМУ СВИДЕТЕЛЬСТВУ ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМпРи Гкнт сссР 1(54) СПОСОБ ВЕСОВОГО ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ И ДОЗАТОР СЫПУЧИХМАТЕРИАЛОВ(57) Изобретение относится к веседозировочной технике и может быть использовано в технических средствахдозирования сыпучих материалов. Способ позВоляет пОВысить точность ДОзирования при выгрузке сыпучих материалов из расходногО бункера, установленногс, с питателем на весоизмеонтельной системе, с помощью операции оценки равенства фактической изаданной производительности,по достижени о которого режим стабилизации производительности поддерживается путем выравнивания суммарного сигнала, пропорционального убы 2вающей массе бункера и интегралу 1 от заданной производительности с величиной опорного сигнала. При выгрузке продукта иэ расходного бункера 11 питателем 12 суммарный сигнал на выходе сумматора 17, пропорциональный убывающей массе бункера и интегралу производительности, изменяется со скоростью, пропорциональной разности между фактической и заданной производительностью. На дополнительном сумматоре 4, в один из входов которого подключен блок 3 задержки, формируется сигнал, пропорциональный скорости изменения сигнала на выходе сумматора 17, При Выравнивании заданной и фактической производительностей сигнал на выходе дополнительного сумматора 4 исчезает, дискриминатор 5 формирует командный сигнал на обнуление инте" гратора 16, сумматора 17, запоминания в ячейке 7 памяти сигнала силоизмерительного преобразователя 10 и начало нового цикла измерения и стабилизации производительности относительно опорного сигнала в ячейке 7 памяти. 2 с.п. ф-лы, 3 ил.Со СФ Изобретение относится к весодозировочной технике и может быть использовано в технических средствах доэирования сыпучих материалов. Цель изобретения - повышение точности дозирования.На фиг.1 и 2 показаны графики изменения массы продукта в емкости, иллюстрирующие способ весового дозирования; на фиг.З - схема дозатора.Существо способа заключается в следующем.На фиг.1 приведен график процесса изменения массы продукта в емкости (кривая А) и суммарного сигнала (кривая В), образованного сложением интегральной величины от заданной производительности и массы продукта в емкости.Производительность дзатора в начале цикла не соответствует заданной величине расхода (как правило ниже), что приводит по мере выхода продукта из бункера к накоплению ин" тегральной ошибки по массе выгруженного продукта. Система регулированиядозатора изменяет производительность питателя в сторону уменьшения этой ,ошибки таким образом, что через определенный интервал времени сумма интегральной величины от заданного расхода Ср и текущего значения массы С сравняются (точка а,), Однако в момент выравнивания масс (точка й, ) производительность питателя будет выше заданной, что приводит к накоплению интегральной ошибки 4 С (другого знака), Таким образом, процесс выравнивания масс порождает процесс дестабилизации про- изводительности питателя и приводит к увеличению погрешности дозирова" ния.Другими словами, для того, чтобы уравнять сумму С и Ср с величиной Ср, необходимо увеличить производительность питателя, причем чем выше, тем больше отклонение заданной и фактической производительности.На фиг.2 приведен график изменения массы продукта в емкости с коррекцией уровня опорного сигнала Ср, В начале процесса (на участке Й-е) изменения производительности питате 5 1 О 15 20 25 30 35 40 45 50 55 ля при выравнивании суммарного сигнала Ср + С относительно С одновременно осуществляется и з мер ени еприращения отклонений 4 С черезустановленные интервалы времени(время опроса) .Как только величина приращений6 С снижается до установленного порога (О, 17), что соответствует равенству фактической производительности заданной величине, в ячейке памяти запоминают величину сигнала,пропорционального массе продукта вемкости и далее процесс стабилиза.ции производительности питателя осуществляют сравнением суммарного сигнала С + Ст с СоТаким образом, процесс управленияи стабилизации производительностипитателя осуществляется не толькопутем сравнения суммы выгруженногои оставшегося в емкости продукта сначальной (контролируемой) массойзагрузки, но и путем выбора новогоопорного сигнала, пропорционального массе продукта в емкости в моментвыравнивания фактической производительности дозатора ее заданной величине. Далее процесс управленияпроизводительностью питателя прималых отклонениях 4 С осуществляетсяизвестным способом,Введение операции выбора опорного сигнала позволяет сократить время выхода на требуемый режим производительности, обеспечить устойчивый процесс дозирования и тем самым повысить его точность.Дозатор сыпучих материалов (фиг.З)имеет тактовый генератор 1, клапаны 2, блок 3 задержки сигнала, дополнительный, сумматор 4, дискриминатор 5 с эадатчиком 6 уровня, ячейку 7 памяти, выход которой черезкоммутатор 8 соединен с первым входом регулятора 9, информационныйвход ячейки 7 соединен с силоизмерительным преобразователем 10, накоторый установлен расходный бункер11, питатепь 12, оснащенный приводом 13, управление которым осуществляется от сумматора 14, первыйвход которого соединен с выходом регулятора 9, а второй с эадатчиком15 производительности, сигнал которо.го одновременно поступает через интегратор 16 на первый вход сумматора17, второй вход которого подключен16792 5 15к силоиэмерительному преобраэователю 10 а выхор к второму входу регулятора 9, Выход снлоиэмерительногопреобразователя 10 подключен к входу устройства 18 сравнения, управляющие входы которогс соединены с эадатчиком 19 контролируемой массы продукта в емкости а выход подключенк управляющим входам коммутатора 8и тактового генератора 1.Дозатор работает следующим образом.Сыпучий материал иэ бункера 11поступает на питатель 12. Масса продукта, находящегося в бункере 11 и напитателе 12, измеряется силоиэмерительным преобразователем 10, выходной сигнал которого поступает на входы устройства 18 сравнения, ячейки7 памяти и на первый вход сумматора 17, на второй вход которого поступает сигнал с выхода интегратора, пропорциональный интегралу отзаданной производительности, установленной на эадатчике 15.На устройстве 18 сравнения сигналсилоизмерительного преобразователясравнивается с заданным, поступающимс задатчика 19 контроля массы продукта в емкости 11.По мере выхода продукта иэ доэатора во внешние приемные устройствасигнал на выходе силоизмерительногопреобразователя 10 уменьшается и придостижении заданного уровня срабатывает устройство 18 сравнения сигналов, формируя команду на включениетактового генератора 1, коммутатора 8, интегратора 16 и сумматора 17.Коммутатор 8, срабатывая, соединяет выход эадатчика 19 с первымвходом регулятора 9 и второй вход регулятора с выходом сумматора 17, накотором суммируются сигналы, пропорциональные массе продукта в емкости11 и интегрированной величине заданной производительности, установленной на задатчике 15 производитель"ности. Выходной сигнал на выходесумматора 17 пропорционален суммеколичества продукта, оставшегося вемкости 11, и количества продукта,которое должно быть выгружено питателем 12 иэ емкости 11 за интервалвремени от момента срабатывания устройства 18 сравнения сигналов,При производительности питателя,равной заданной величине, сигнал навыходе сумматора равен сигналу эадатчика 19 контролируемой массыпродукта, а сигнал на выходе регулятора 9 стабилизируется, так как сигналы на его входах равны друг другу.При отклонении производительности питателя от заданной величины,что чаще всего бывает в начале цикла дозирования, например, в меньшуюсторону, сигналы на входе регулятора не равны друг другу, т,е. сигнал с выхода сумматора 17 ниже сиг"нала с выхода задатчика 19. При этомсигнал с выхода сумматора 14, равныйсумме сигналов задатчика 15 производительности и регулятора 9, возрастает, что приводит к увеличениюпроизводительности питателя .2 О Одновременно с включением тактового генератора 1, на дополнительный сумматор 4 поступают два сигнала с одного выхода сумматора 17.При временной задержке в блоке 3 25 на выходе дополнительного сумматора4 появится сигнал, пропорциональныйскорости изменения сигнала на выходе сумматора 17.По мере увеличения производитель"ности питателя скорость нарастаниясигнала на выходе сумматора 17 будет снижаться и в момент равенствапроизводительности питателя заданной величине снизится до нулевого уровня. При этом на выходе дополнительного сумматора сигнал исчезнети дискриминатор 5 ло команде задатчика 6 сформирует команду на обнуление интегратора 16, сумматора 17 и 4 О на включение ячейки 7 памяти на эа"поминание сигнала силоиэмерительного преобразователя 10 и переключениекоюутатора 8 на подключение ячейки7 памяти на первый вход регулятора 9, 45С этого момента процесс сложениясигналов в сумматоре 37 начинается с нулевого уровня и при равенствепроизводительности питателя заданнойвеличине сигнал на выходе сумматора17 нь изменяется и равен сигналуна выходе ячейки 7 памяти. Регулятор 9 при равенстве входных сигналов стабилизирует работу привода питателя.При малых отклонениях производительности процесс управления питателем осуществляется сравнением суммысигналов, пропорциональных массе выгруженного и оставшегося в емкости11 продукТа, с опорным в ячейке 7,При больших отклонениях производительности в большую или меньшую сторону установка нового опорного сигнала в ячейке 7 может повторитьсяпокоманде дискриминатора 5. Формула изобретения 10 20 1. Способ весового доэирования сыпучих материалов, заключающийся в том, что последовательно задают в текущие моменты времени сигнал, пропорциональный заданному расходу мас сы, формируют сигнал, пропорциональный текущему злачению массы продукта в емкости, подают на привод питателя сигнал, пропорциональный заданному расходу массы, интегрируют сигнал, пропорциональный заданной производитель ности, суммируют сигналы, пропорциональные текущему значению массы продукта в емкости и интегралу от за данной производительности, сравнивают полученный первый суммарный сигнал с сигналом, пропорциональным верхнему заданномУ значению массы . продукта в емкости, и формируют корректирующий сигнал управления производительностью питателя для стабилизации первого суммарного сигнала относительно сигнала, пропорционального заданному верхнему значению массы продукта в емкости, о т л и ч а ю 35 щ и й с я тем, что, с целью повышения точности дозирования, одновременно со стабилизацией первого суммарного сигнала, пропорционального верхнему заданному значению массы продукта в емкости, определяют величину вращения его отклонения от верхнего заданного значения в начале цикла доэирования, а в момент стабилизации приращения отклонений запоминают величину опорного сигнала, пропорционального текущему значению массы продукта в емкости, который затем сравнивают,. с сигналом, полученным суммированием сигналов, один иэ50 которих пр,л 1 орпион"лен текущему зна- чению массы продукта в емкости, второй получен интегрированием с,юмента запоминания сигнала, пропорционального заданной производительности, н по результату сравнения осуществляют формирование корректирующего сигнала управления питателем для стабилизации суммарного сигнала относительно опорного сигнала.2. Лоэатор сыпучих материалов, содержащий расходную емкость с питателем, установленным на силоизмерительном преобразователе, интегратор, коммутатор, эадатчик расхода продукта, выход которого соединен с одним из входов первого сумматора привода питателя и через коммутатор - с интегратором, второй сумматор,эадатчик контролируемой массы продукта в расходной емкости, устройство сравнения и регулятор, выход которого соединен с вторым входом сумматора привода питателя, первый вход соединен с задатчиком контролируемой массы продукта в емкости, а второй вход через коммутатор - с выходом второго сумматора, первь 1 й вход которого соединен с силоизмерительным преобразователем, а второй вход - с выходом интегратора, о т л и ч а ю - щ и й с я тем, что, с целью повышения точности доэирования, в него введены ячейка памяти, дискриминатор, дополнительный сумматор, блок задержки, два клапана и генератор тактовых сигналов управления, соединенный по управляющему входу с блоком сравнения, причем дополнительный сумматор соединен с выходомвторого сумматора первым входом через первый клапан, а вторым входом - через второй клапан и блок задержки, выход дополнительного сумматора через дискриминатор соединен с управляющими входами коммутатора, интегратора и ячейки памяти, вход которой соединен с силоизмерительным преобразователем, а выход через коммутатор подключен к регулятору.
СмотретьЗаявка
4387944, 24.12.1987
ПРЕДПРИЯТИЕ ПЯ М-5397
АЛЕКСЕЕВ ГЕННАДИЙ ФИЛИППОВИЧ, ИВКИН ЕВГЕНИЙ НИКОЛАЕВИЧ, РУЗАКОВ СЕРГЕЙ ДМИТРИЕВИЧ, ТОВБИН ЛЕОНИД ИСААКОВИЧ, ШОРБАН МИХАИЛ ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G01G 13/00
Метки: весового, дозатор, дозирования, сыпучих
Опубликовано: 23.10.1989
Код ссылки
<a href="https://patents.su/5-1516792-sposob-vesovogo-dozirovaniya-sypuchikh-materialov-i-dozator-sypuchikh-materialov.html" target="_blank" rel="follow" title="База патентов СССР">Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов</a>
Способ преобразования шунтированного емкостью сопротивления постоянному току в аналоговый выходной сигнал

Номер патента: 438937
Опубликовано: 05.08.1974
МПК: G01R 17/00
Метки: аналоговый, выходной, емкостью, постоянному, преобразования, сигнал, сопротивления, току, шунтированного
...выходной сигнал преобразованием присоединяемого на этом такте к произвольному регулируемому входу преобра зователя тока образцового сигнала.Способ поясняется чертежом,Схема содержит измеряемое сопротивление1, коммутатор входа 2, преобразователь тока 3, коммутатор выхода 4, компаратор задан ного уровня 5, коммутатор 6, запоминающееустройство 7, дополнительный вход преобразователя 8, источник питания формирователя образцового сигнала 9, сопротивление для формирования образцового сигнала 10 и из меритель выхода 11.Способ осуществляют следующим образом.На первом такте коммутаторы 2, 4 и 6 находятся в положении 1, При этом на входЕпреобразователя тока 3 поступает ток := -.кВыходной сигнал преобразователя тока 3 посредством компаратора 5...
Устройство для формирования сигнала межкадровой разности

Номер патента: 938423
Опубликовано: 23.06.1982
МПК: H04N 7/18
Метки: межкадровой, разности, сигнала, формирования
...задержанный квантованный видеосигнал с выхода выходного усилителя 8 поступает на второй вход блока 2 кодирования, который осуществляет реге нерацию этого видеосигнала (те. освобождение его от шумов и искажений). Иаксимально возможное число уровней квантования и должно выбираться в соответствии с требуемой 45 вероятностью ошибки правильной регенерации сигнала, которую нужно задавать так, чтобы она практически не ухудшала основных параметров телевизионной системы. (например, вероятности правильного обнаружения метеоров).Процедура регенерации видеосигнала состоит из квантования каждого элемента видеосигнала и выдачи на выход блока 2 кодирования соответствующих эталонных уровней, в которых уже не содержится шумов и искажений. На...
Устройство для автоматического регулирования вязкости шоколадной массы

Номер патента: 1084731
Опубликовано: 07.04.1984
Авторы: Благовещенская, Куцыгин, Лаврова, Макаров, Нестеров, Панфилов, Сергеев
МПК: G05B 11/44
Метки: вязкости, массы, шоколадной
...к емкости 25 и к второй входной камере элемента 12 сравнения, Выход пятого реле 19 сообщен с управляющей камерой шесто" го реле 20 и через второй регулируемый дроссель 26 - с управляющей ка" мерой седьмого реле 21.Выход восьмого реле 22 связан с каналом 27 сигнализации, а выход четвертого реле 18 - с иасосом-доватором 3.Выход узла 1 подключен к первым входным камерам элементов 11-13 сравнения к первому входу 28 блока 6, второй вход 29 которого соединен с выходом элемента 12 сравнения. Первый 30 и второй 31 выходы блока 6 связаны соответственно с второй входной камерой и соплом элемента 11 сравнения.Блок 6 временной программы содержит восемь реле: первое 32, второе 33, третье 34, четвертое 35, пятое 36, шестое 37, седьмое 38, восьмое 39,...
Способ управления производительностью группы центрифуг непрерывного действия сахарного производства

Номер патента: 1324692
Опубликовано: 23.07.1987
Авторы: Жуковский, Полторак, Резник, Скаковский
МПК: B04B 13/00, C13F 1/06
Метки: группы, действия, непрерывного, производительностью, производства, сахарного, центрифуг
...расходной характеристики клапана подачи утфеля,Сигналы уровня, измеренные датчиками 2, подают на блоки 11 и 12 дифференцирования и блоки 13 и 14 нелинейности, последние реализуют зависимость площади сечения утфелемешалкиот ее уровня с учетом масштабногокоэффициента, который обеспечиваетсогласование размерности и знаков.Сигналы уровня, продифференцированныев блоках 11 и 12, поступают в блоки15 и 16 умножения, куда поступают также сигналы с блоков 13 и 14, Сигналыпроизведения с блоков умножения, соответствующие величинам расходов утФеля из каждой утфелемешалки, складывают в сумматоре 17, на выходе которого получают сигнал, соответствующий общему расходу утфеля Ц(г.).Сигнал с сумматора 17 пропускают через блок 18...
Способ преобразования цифрового сигнала в аналоговый пневматический сигнал

Номер патента: 257862
Опубликовано: 01.01.1969
Авторы: Институт, Телемеханики, Фудим
МПК: G06G 5/00
Метки: аналоговый, пневматический, преобразования, сигнал, сигнала, цифрового
...ь использованы емсоотношением объеИзобретение относится к способам цифроаналогового преобразования, а именно к способам преобразования цифрового сигнала впневматический.Известны способы цифро-ацалогового преобразования пневматических сигналов, основанные на использовании емкостей, объемыкоторых пропорциональны весам разрядов.Недостатком известных способов являетсятрудность реализации устройств для большего числа разрядов и из-за этого недостаточнаяточность преобразования.По предлохкенному способу для повышенияточности в емкости подают пневматическиесигналы разного давления в соответствии собъемами емкостей, чтобы произведения величины объема каждой емкости на величинудавления поданного в цее оигнала были пропорциональны весам...
Предыдущий патент: Устройство для подбора упругих опор чувствительного элемента
Следующий патент: Устройство для контроля массы длинномерных заготовок
Случайный патент: Компрессионно-дистракционный аппарат