Способ определения параметров вектора дисбаланса роторов и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1392414
Авторы: Добровольский, Ефремов, Муравский, Прилуцкий, Савченко

Текст
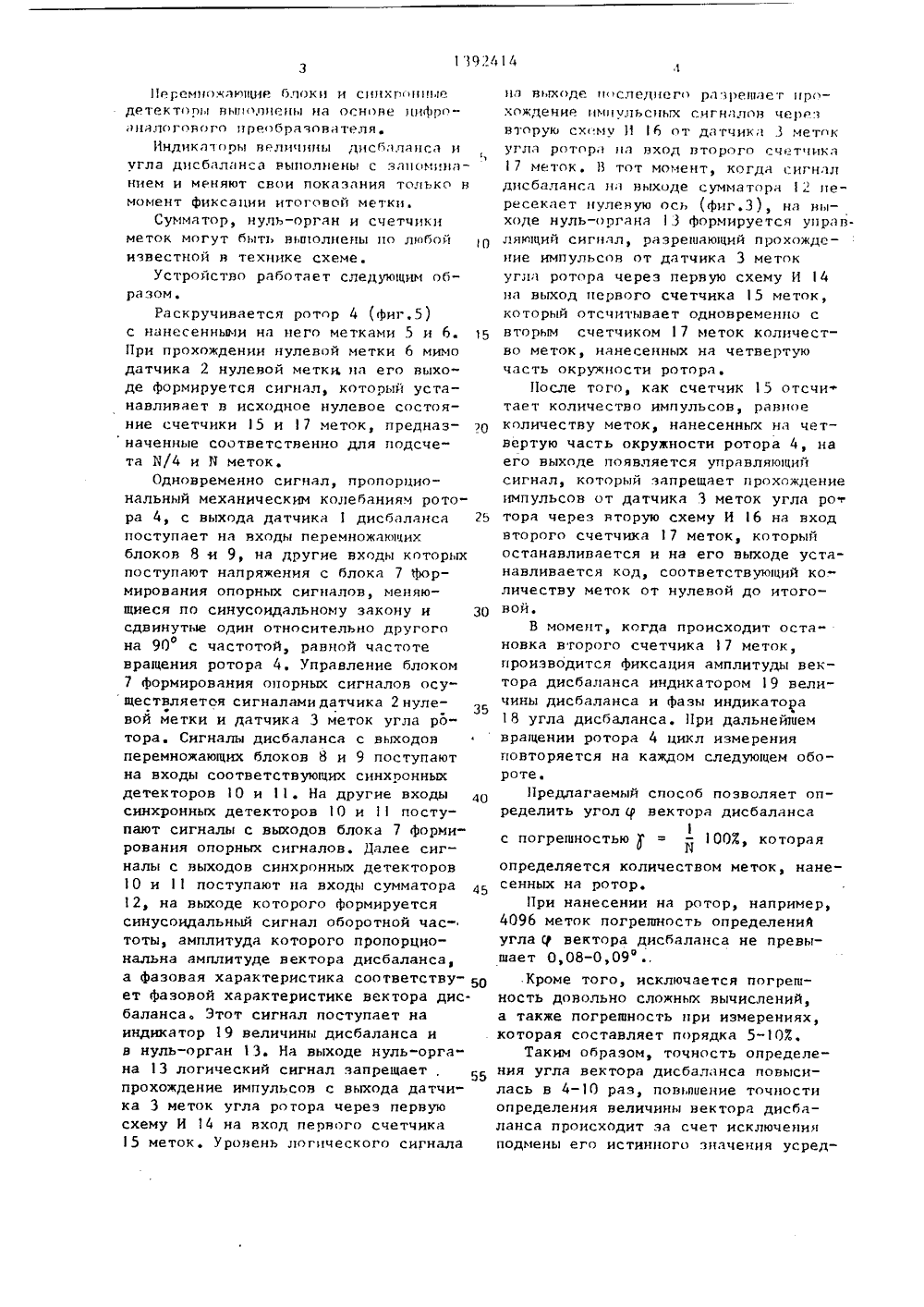
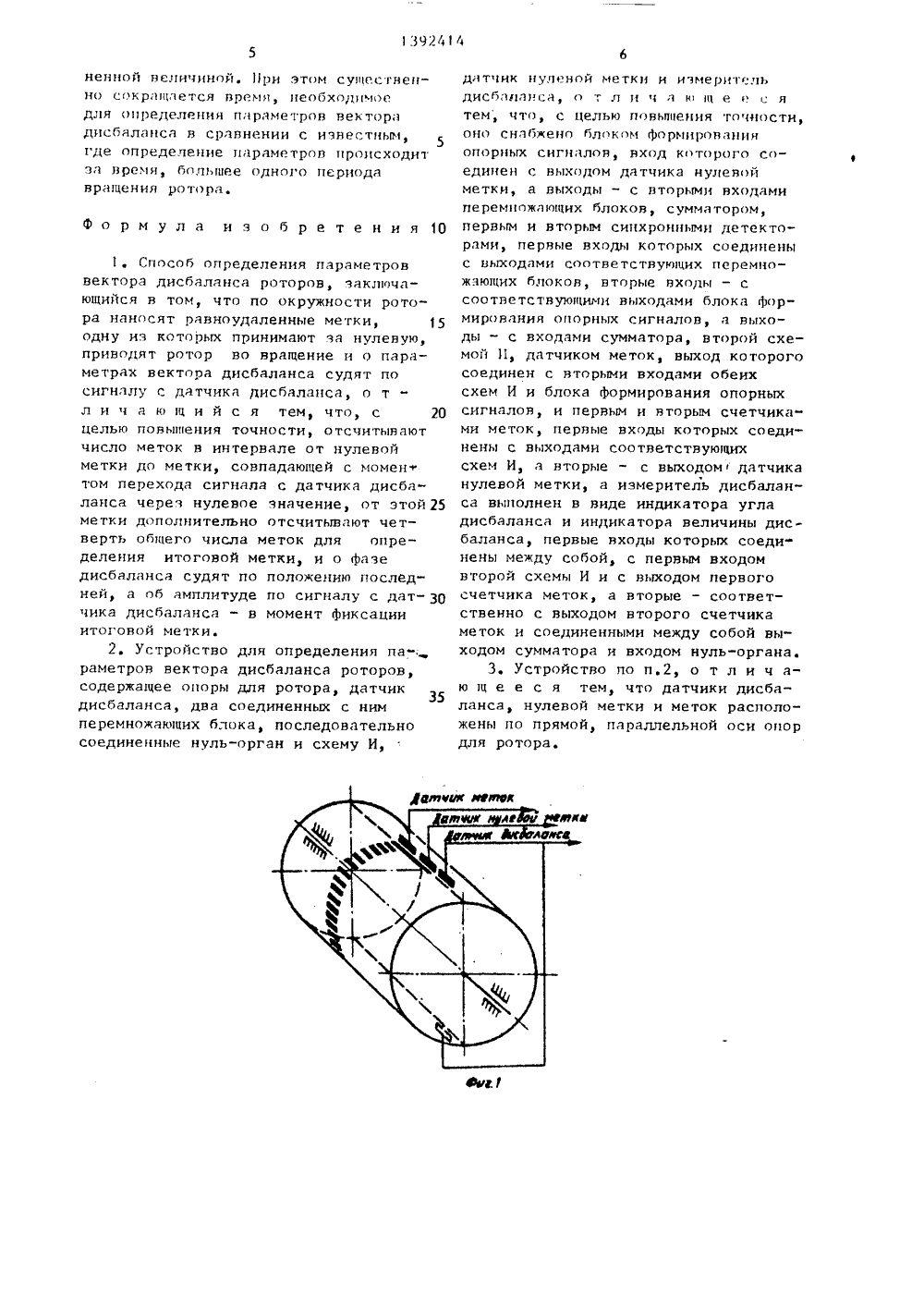
(5 4 С 01 М 1/22 ОПИ И ЕТЕН О ,т У ИДЕТ ЕЛ РСНОМ К ал,ЕФремов,й 84.Р1. ГОСУДАРСТВЕННЫЙ КОМИТЕТ ССС ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТ(7) Институт сверхтвердых материАН УССР(56) Авторское свидетельство СССВ 378034, кл. 0 01 М 1/22, 1969.Авторское свидетельство СССРУ 664073, кл. 0 01 М 1/22, 1977.Авторское свидетельство СССРУ )249358, кл. О 01 М 1/22, 19Авторское свидетельство СССУ 996885, кл. О 01 М 1/22, 198 54) С 11 ОСОБ О 11 РЕДЕЛЕНИЯ ПАРАМЕТРОВЕКТОРА ДИСБАЛАНСА РОТОРОВ И УСТРОТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ(57) Изобретение относится к балансировочной технике. Цель изобретенияповьцвение точности за счет исключенидинамической погрешности. 11 о окружности ротора 4 наносят И равноудалЬнных меток 5, одну из них принимают знулевую метку 6. При вращении ротора4 Фиксируют сигналы с датчиков 1,2и 3 дисбаланса, нулевой метки и ме"ток, В счетчике 17 меток отсчитывают число меток от нулевой до метки,совпадающей с моментом перехода черенуль сигнала с датчика 1 дисбаланса,1392414 что Фиксируется с помощью нуль-органа 3, затем к полученному числуметок прибавляют (4 меток с помощьюсчетчика меток и получают число Мсоответствующее Фазе дисбаланса,которая определяется как ср = 211/11 Изобретение относится к балансироночной технике и может быть использовано при балансировке роторов различных машин, а также прецизионных станков н условиях повышенных 5 вибраций Фундаментов.Цель изобретения - повышение точности за счет исключения динамической погрешности, достигаемое путем учета изменения скорости вращения за один оборот.На Фиг. представлен балансируе" мый ротор с нанесенными метками и установленными датчиками, общий вид; на Фиг.2 - эпюра сигнала дисбаланса 15 при постоянной скорости вращения ротора; на Фиг.3 - то же, при переменной скорости вращения ротора; на фиг,4 - функциональная схема устройства.20Способ определения параметров век" тора дисбаланса заключается в том, что наносят по окружности 1 равноудаленных меток, одну из которых принимают за нулевую, отмечая ее любым 25 известным способом, приводят ротор во вращение, Фиксируют сигнал с датчика дисбаланса, отсчитывают число И меток от нулевой метки до метки, совпадающей с моментом перехода 30 через нулевое значение сигнала с датчика дисбаланса, от этой метки отсчитывают дополнительно 11/4 меток для определения итоговой метки, определяемой числом 1 , и по сигналу с датчика дисбялянса в момент Фиксации итоговой метки Л судят об амплитуде дисбаланса, я по положению итоговой метки - о Фазе дисбаланса, определяе мой кяк= 2, /1. 40Устр 1 ств Лпя реализации спсоба содержит дят икп 1,2 и 3 дисбаланса и индицируется с помощью индикатора 18 угла дисбаланса, Амплитуда дисбаланса Фиксируется н момент отсчетаметки и индицируется на индикаторе 9 величины дисбаланса, 2 с.пи 1 з.п. Ф-лы, 4 ил. нулевой метки и меток, расположенныхна прямой, параллельной оси опор дляротора 4, на который нанесены метки 5и нулевая метка 6, блок 7 формирования опорных сигналов, входы которогосоединены с выходами датчиков 2 и 3нулевой метки и меток, первый ивторой перемножающие блоки 8 и 9,входы которых соединены с выходомдатчика 1 дисбаланса, первый и второйсинхронные детекторы 10 и 11, первыевходы которых соединены с выходамисоответствующих перемножающих блоков8 и 9, а вторые - со вторыми входамипоследних и с соответствующими выходами блока 7 Формирования опорныхсигналов, последовательно соединенные сумматор 2, входы которого соединены с выходами синхронных детекторов О и 11, нуль-орган 13, схемуИ 4 и счетчик 15 меток, последовательно соединенные вторую схему И 16,второй вход которой соединен с вторымнходом первой схемы И 14 и выходомдатчика 3 меток, и второй счетчик 17меток, второй вход которого соединенс вторым входом первого счетчика 15меток и с выходом датчика 2 нулевойметки, и измеритель дисбаланса, выполненный в виде индикатора 18 угладисбаланса и индикатора 19 величиныдисбаланса, первые входы которых со"единены между собой, с первым входомнторой схемы И 16 и с выходом первого счетчика 15 меток, а вторыесоответственно с выходами второгосчетчика 17 меток и сумматора 12. Блок формирования опорных сигналов предстанляет собой княдрятурный цифровой генератор.1 еремц жающие блоки и сццхг ппыедетекторы выцолпецы ца основе цшФроацалогоного преобразователяИндикаторы велцчццы дцсбалацса ис,угла дисбаланса выполнены с запоминанием и меняют свои показания только нмомент фиксации итоговой метки,Сумматор, нуль-орган и счетчикиметок могут быть выполнены по любойизвестной н техцике схеме.Устройство работает следующим образом.Раскручивается ротор 4 (Фиг,5)с нанесенными на него метками 5 и 6. 15При прохождении нулевой метки 6 мимодатчика 2 нулевой метки ца его выходе Формируется сигнал, который устанавливает н исходное нулевое состояние счетчики 15 и 17 меток, предназ Оначенцые соответственно для подсчета И/4 и Л метокОдновременно сигнал, пропорциональный механическим колебаниям ротора 4, с ныхода датчика 1 дисбаланса 25поступает на входы перемножающихблоков 8 и 9, на другие входы которыхпоступают напряжения с блока 7 Формирования опорных сигналов, меняющиеся по синусоидальному закону и 30сдвинутые один относительно другогоона 90 с частотой, ранной частотевращения ротора 4. Управление блоком7 Формирования опорных сигналов осу ществляетоя сигналами датчика 2 нуле 35вой метки и датчика 3 меток угла ротора. Сигналы дисбаланса с выходовперемножающих блоков 8 и 9 поступаютна входы соответствующих синхронныхдетекторов 10 и 11. На другие входы 4 Осинхронных детекторов 10 и 11 поступают сигналы с выходов блока 7 Формирования опорных сигналов. Далее сигналы с выходов синхронных детекторов1 О и 11 поступают ца входы сумматора 4512, на выходе которого Формируетсясинусоидальный сигнал оборотной частоты, амплитуда которого пропорциональна амплитуде вектора дисбаланса,а фазовая характеристика соответствует Фазовой характеристике вектора дисбаланса. Этот сигнал поступает иаиндикатор 19 величины дисбаланса ин нуль-орган 13. На выходе нуль-органа 13 логический сигнал запрещает,прохождение импульсов с выхода датчика 3 меток угла ротора через первуюсхему И 14 на вход первого счетчика15 меток. Уровень логического сигнала ца выходе последнего разрешает прохождение импульсных сигналон через вторую схему И 6 от датчик 3 меток угла ротора ца вход второго счетчик 17 меток. В тот момент, когда сигнал дисбаланса ца выходе сумматора 12 пересекает нулевую ось (Фиг.3), ца выходе нуль-органа 3 Формируется упранляющиц сигнал, разрешающий прохождение импульсов от датчика 3 меток угла ротора через первую схему И 14 ца выход первого счетчика 15 меток, который отсчитывает одновремеццо с вторым счетчиком 17 меток количество меток, нанесенных на четвертую часть окружности ротора.После того, как счетчик 15 отсчи" тает количество импульсов, равное количеству меток, нанесенных ца четвертую часть окружности ротора 4, на его выходе появляется упранляющиц сигнал, который запрещает прохождение импульсон от датчика 3 меток угла рот тора через вторую схему И 16 на вход второго счетчика 17 меток, который останавливается и на его выходе устанавливается код, соответствующий количеству меток от нулевой до итоговой.В момент, когда происходит остановка второго счетчика 17 меток, производится Фиксация амплитуды вектора дисбаланса индикатором 19 величины дисбаланса и Фазы индикатора 18 угла дисбаланса. При дальнейшем вращении ротора 4 цикл измерения повторяется на каждом следующем обороте.Предлагаемый способ позволяет определить уголвектора дисбаланса1с погрешностью= - 1003 котораяфопределяется количеством меток, нанесенных на ротор,При нанесении на ротор, например,4096 меток погрешность определенияугла р вектора дисбаланса не превышает 0,08-0,09.,Кроме того, исключается погрешность довольно сложных вычислений,а также погрешность при измерениях,которая составляет порядка 5-107.,Таким образом, точность определения угла вектора дисбаланса повысилась в 4-10 раэ, повышение точцостиопределения величины вектора дисбаланса происходит эа счет исключенияподмены его истинного значения усред 139244неццоц величиной. ри этом существенно сокращается время, необходимое для оиредепецця параметров вектора дисбаланса в срзвнеции с известцымф 5 где определение параметров происходит эа время, большее одного периода вращения ротора.Формула изобретения О1, Способ определения параметров вектора дисбаланса роторов, заключающийся в том, что по окружности ротора наносят равноудаленные метки, 5 одну из которых принимают за нулевую, приводят ротор во вращение и о параметрах вектора дисбаланса судят по сигналу с датчика дисбаланса, о т - л и ч а ю ц и й с я тем, что, с 20 целью повьппеция точности, отсчитывают число меток в интервале от нулевой метки до метки, совпадающей с момен том перехода сигнала с датчика дисба" ланса через нулевое значение, от этой 25 метки дополнительно отсчитывают четверть общего числа меток для определения итоговой метки, и о Фазе дисбаланса судят по положению последней, а об амплитуде по сигналу с дат чика дисбаланса - в момент Фиксации итоговой метки.2. Устройство для определения па" раметров вектора дисбаланса роторов, содержащее опоры для ротора датчикЭ 35 дисбаланса, два соединенных с ним перемножающих блока, последовательно соединенные нуль-орган и схему И,датчик нулевой четки и измерительдисбаланса, о т л и ч а ю щ е е с ятем, что, с целью повьпцеция точности,оцо снабжено блоком формироваццнопорцых сигналов, вход которого соединен с выходом датчика нулевойметки, а выходы - с вторыми входамиперемцожающих блоков, сумматором,первым и вторым сицхроццыми детекторами, первые входы которых соединеныс выходами соответствующих перемцожающих блоков, вторые входы - ссоответствующими выходами блока Формирования опорных сигналов, а выходы - с входами сумматора, второй схемой И, датчиком меток, выход которогосоединен с вторыми входами обеихсхем И и блока Формирования опорныхсигналов, и первым и вторым счетчика"ми меток, первые входы которых соединены с выходами соответствующихсхем И, а вторые - с выходом датчиканулевой метки, а измеритель дисбаланса выполнен в виде индикатора угладисбаланса и индикатора величины дисбаланса, первые входы которых соединены между собой, с первым входомвторой схемы И и с выходом первогосчетчика меток, а вторые - соответственно с выходом второго счетчикаметок и соединенными между собой выходом сумматора и входом нуль-органа.3. Устройство по п.2, о т л и ч аю щ е е с я тем, что датчики дисбаланса, нулевой метки и меток расположены по прямой, параллельной оси опордля ротора,1392414Составитель Ю.Круглов Редактор Л,Повхан Техред М.Дидык Корректор Н.Король Заказ 1804/46 Тираж 847 Подписное ВНИИПИ Государственного комитета СССРпо делам изобретений и открытий113035, Москва, Ж, Раушская наб., д, 4/5 Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
СмотретьЗаявка
4132766, 08.10.1986
ИНСТИТУТ СВЕРХТВЕРДЫХ МАТЕРИАЛОВ АН УССР
ДОБРОВОЛЬСКИЙ ГЕННАДИЙ ГЕОРГИЕВИЧ, ЕФРЕМОВ ВЛАДИМИР БОРИСОВИЧ, ПРИЛУЦКИЙ ВАЛЕРИЙ ЛЬВОВИЧ, МУРАВСКИЙ АРКАДИЙ НИКОЛАЕВИЧ, САВЧЕНКО ЛИДИЯ МИХАЙЛОВНА
МПК / Метки
МПК: G01M 1/22
Метки: вектора, дисбаланса, параметров, роторов
Опубликовано: 30.04.1988
Код ссылки
<a href="https://patents.su/5-1392414-sposob-opredeleniya-parametrov-vektora-disbalansa-rotorov-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения параметров вектора дисбаланса роторов и устройство для его осуществления</a>
Установка для автоматического измерения неуравновешенности

Номер патента: 310150
Опубликовано: 01.01.1971
Авторы: Куракин, Московский, Нистратов, Сарахов, Сомов, Терехова, Шилин
МПК: G01M 1/22
Метки: неуравновешенности
...образом. Пусковым устройством узла 23 включения автоматического цикла включается питание привода уравновешиваемого ротора 2; ротор начинает набирать обороты, Триггер 11 при этом устанавливается в такое положение, при котором открываются каскады совпадения 17 - 19, а каскад совпадения 22 закрывается и не пропускает опорные импульсы с фотодиодного датв 360 импульсов. Сброс счетчиков блоков 7 измерения и фиксации угла в нулевое состояние осуществляется попеременно от импульсов, снимаемых с выходов триггера 10 через открытые каскады совпадения 17 и 19. В то время, как один из блоков 7 удерживается в нулевом состоянии, другой заполняется импульсами генератора эталонной частоты 8,При наборе оборотов ротора 2 на выходах блоков 7...
Устройство для преобразования координат вектора в трехмерном пространстве

Номер патента: 1403062
Опубликовано: 15.06.1988
Авторы: Владимиров, Духнич, Орлов
МПК: G06F 7/544
Метки: вектора, координат, преобразования, пространстве, трехмерном
...триггер (34 36)формула изобретения устанавливается в нулевое состояние, на элементах И 37 - 42 прекращается выработка сигналов управления, а на элементах И 43 - 45 прекращается выработка соответствующих счетных импульсов. Элемент ИЛИ 48 открывается единичными выходами триггеров 34 - 36 и разрешает выдачу через элемент И 49 по входу 24.2 сдвиговой серии на регистры 2 - 4. По выходу 29 с распределителя 47 в блок 1 поворота вектора выдаются импульсы, необходимые для синхронизации его работы. После отработки всех углов триггеры 34 - 36 устанавливаются в нулевое состояние, элементы ИЛИ 48 и И 49 закрываются и отключают сдвиг информации в регистрах блока поворота. Инвертированный на элементе НЕ 50 выход элемента ИЛИ 48 является...
Устройство для измерения неравномерности скорости вращения вала

Номер патента: 375555
Опубликовано: 01.01.1973
Авторы: Зайцев, Лолейт, Ручкин
МПК: G01P 15/093, G01P 3/68
Метки: вала, вращения, неравномерности, скорости
...положением вала. Схе мы 7, 8 совпадения, схема сИЛИ 10 и триг гер 9 обеспечивают такой порядок подключе ния выходов усилителей 2 и 3, что при задан 15 ном направлении вращения контролируемого вала измеряемый интервал времени задается двумя последовательными импульсами со схе мы ссИЛИ 10, сформированными одной мет кой диска датчика. 20Распределитель П и переклюжат для выделения интервалахождения метки с заданным норованного угла ср, измеряемого25 щим прибором 13,Фотоприемник 18 срабатываета, проходящего только черезприемники 19 и 20 - от луча сщего через любую щель 22 и30 так, чтобы угол между ними отнвала, равный , был бы меньше угла разбиения диска метками.Устройство работает следующим образом.При подаче сигнала Сброс обнуляются все...
Всесоюзная, ядш1т1о. га1; -т н. i-. jу -” « -• • j gt; amp; •__ьлиотека

Номер патента: 315283
Опубликовано: 01.01.1971
Автор: Кислюк
МПК: H03K 3/78
Метки: всесоюзная, га1, лиотека, ядш1т1о
...8 выполнен в виде сумматора по модулю два.Формирователь весовых коэффициентов 9 состоит цз ячеек 24 - 26 (схем И) и ячейки 27 (схемы ИЛИ), К ячейке 24 подсоединен выход единиц регистра блока 4 памяти до. стоверцостц и выход единиц перемцожителя 8.Если принимаемый сигнал находится вце нулевой зоны, и его знак совпадает со знаком сипхросцгцала, то ца оба входа ячейки 24 поступают уровни 1, Тогда на выходе формирователя весовых коэффициентов 9 выда.ется уровеньв течение всего элементарного интервала сравнения -КУЕсли принимаемый сигнал имеет верный знак и находится внутри нулевой зоны, то на выходе ячейки 24 оказывается уровень 0, При этом с выхода нулей блока 4 памяти достоверности и выхода единиц перемножителя 8 на ячейку 25...
Устройство для защиты от однофазного замыкания на землю в сети с изолированной нейтралью

Номер патента: 1406680
Опубликовано: 30.06.1988
Автор: Бухтояров
МПК: H02H 3/16
Метки: замыкания, защиты, землю, изолированной, нейтралью, однофазного, сети
...выбирается меньшей длительности полупериода основной частоты и большей длительности помехи. Таким образом, исключается возможность ложного срабатывания устройства от сигналов, имеющих частоту, отличную от основной (помех, субгармонических колебаний и т. л.).Элемент И-НЕ 12 исключает возможность ложного срабатывания устройства при одновременном первоначальном воздействии сигналов датчиков тока и напряжения.Устройство работает следующим образом.При возникновении на защищаемом присоединении 1 однофазного замыкания на землю сначала появляется сигнал на выходе ДТНП 2, затем, спустя приблизительно четверть периода - сигнал на выходе ДННП 3. Если уровень этих сигналов оказывается достаточным лля срабаз ывания пороговых элементов 17 и 18,...
Предыдущий патент: Устройство для определения дисбаланса роторов
Следующий патент: Балансирующее устройство
Случайный патент: Устройство для определения коэффициентов фурье