Способ управления вентильными группами следящей системы
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1001430
Автор: Дубовик





Текст
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ рц 1001430 Союз СоаетскнкСоцналнстнчесннкРеспублик(61) Дополнительное к авт, сеид-ву(22) Заявлено 150581 (21) 3304897/24-07 3 ЧМ Ка.з Н 02 Р 1316 с присоединением заявки МоГосуларстненный комитет СССР ио аелам изобретений и,открытий(54 ) СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМИ ГРУППАМИ СЛЕДЯЩЕЙ СИСТЕМЫИзобретение относится к электротехнике и может быть использовано в системах автоматического управления электроприводамн постоянного тока следящих систем, в частности в следящих приводах проьыаленных роботов,Известны различные способы управления вентильными группами в реверсивном электрот(риводе.Известен способ управления реверсивным тиристорным электроприводом при раздельном управлении группами тиристоров преобразователя, состоящий в задании диапазона изменения угла управления преобразователя в виде шагов регулирования ( 11Однако указанный способ сложен по своей аппаратурной реализации.Наиболее близким к предлагаемому является способ раздельного управления вентильными группами преобра" зователя 2).При этом способе импульсы включения вентилей подаются только на работающую, например выпрямительную группу.-Для включения инверторной группы необходимо, чтобы ток выпрямительной группы вентилей уменыаился до нуля. Недостаток известного способа "сложность его осуществленияДля получения среднего выпрямленного напряжения при способе раздельного управления вентильными группами в работающей группе вентилейпоочередно на определенный, пропорциональный сигналу управления, уголуправления отпирается каждыйв вентиль, Для этого импульсы управлениякаждым вентилем подаются в моментывремени, определяемые равенствомзначений управляющего напряженияи пилообраэногО опорного напряжения 15 каждого вентиля, сфазированного спитающим напряжением этого вентиля.Сложность осуществления способа приводит к громоздкой аппаратурнойреализации. По этому способу каждый 20 вентиль управляется своей схемой,включающей сумматор и формировательимпульсов. Кроме того,.для осуществления раздельного способа управления в схему управления задействован 25 генератор опорных напряжений, выдающий пилообразные напряжения на .сумматоры схем управления тнрнсторами.При раздельном способе управления вентнльными группами существен" 30 но нелинейна в области малых нагру1001430 10 15 20 1Г=2,4 Г зок механическая характеристика управляемый выпрямитель-двигатель.Цель изобретения - упрощение способа и линеаризация механической характеристики.Поставленная цель достигается тем, что поочередно с частотой, на порядок меньший частоты питающего напряжения и с длительностью, пропорциональной величине управляющего, сигнала, включает выпрямительную и инверторную группы вентилей, причем импульсы включения подают одновременно на все вентили работающейгруппы.На фиг. 1 приведена функциональная блок-схема реализации предлагаемого способа; на фиг. 2 - диаграммы, поясняющие способ управления вен тильными группами при отсутствии входного сигнала; на фиг. 3. - диаграммы, поясняющие способ управления вентильными группами при наличии входного сигнала.Блок-схема (фиг. 1 ) содержит суммирующий усилитель 1, корректирующий фильтр 2, релейный элемент 3, формирователи 4 и 5 импульсов (ждущие мультивибраторы ), группы б и 7 вентилей, двигатель 8 постоянного тока, датчик 9 обратной связи.Способ осуществляется следующим .,офрузом. При отсутствии входного сигнала в следящей системе на вход релейного элемента 3 с датчика 9 обратной связи через сумматор 1 и корректирующий Фильтр 2 подается гармоническое напряжение ОА (фиг. 2), вызванное . автоколебаниями в системе или вынужденными. колебаниями от линеаризующего генератора (не показан ).Релейный элемент 3 отрабатывает гармонический входной сигнал, в результате чего на его выходе появля-. ются прямоугольные разнополярные миандры напряжения Ор одинаковой длительности. Напряжение с выхода релейного элемента 3 подается на формирователи 4 и 5 управляющих импульсов (фиг. 1). На прямоугольные миандры напряжения положительного знака с заданной задержкой по времени срабатывает Формирователь 4 управляющих импульсов (фиг, 1), в результате .на его выходе появляются импульсы управляющего напряжения высокой частоты О 1; (фиг. 2).Формирователь 4 (фиг. 1 ) ,выдает импульсы до теХ пор, пока не изменится до нуля напряжение на выходе релейного элемента 3, и, следовательно, на входе формирователя импульсов, Управляющие импульсы с формирователя 4 импульсов одновременно подаются на управляющие элекТродй одной группы 6 тиристоров, при 35 40 45 50 55 60 65 этом в начальный момент открывается тиристор,между анодом и катодом ко-, торого будет максимальное положительное напряжение в момент подачи управляющих импульсов.Далее в группе работающих вентилей происходит естественная коммутация, т.е. открывается тот вентиль, на котором в текущий момент времени напряжение больше, чем на других, в то время как работающий перед этим вентиль закрывается под действием разности фазных напряжений, приложенных к анодам соседних вентилей. Работающая группа вентилей запирается при пропадании управляющих импульсов напряжения на выходе формирователей импульсов. Максимальное время задержки выключения вентильной группы после выключения управляющих импульсов где 1 - частота питающего напряже 1 Иния вентильных групп. На это время должны быть настрое,ны задержки формирователей импульсов управления при их включении для избежания коротких замыканий в силовых цепях. Выпрямленное вентильной группой напряжение О(Фиг. 2) определенного знака подается на якорь исполнительного электродвигателя 8. Двигатель отрабатывает поступающий сигнал. При изменении знака гармонического сигнала ОА (фиг. 2) на входе релейного элемента 3 и на его выходе появляется миандр прямоугольного напряжения Ор, противоположного от первоначального знака. Выключается ранее работавший Формирователь импульсов (фиг. 1) и с задержкой времени Т включается формирователь 5 управляющих импульсов. Импульсы включения О(фиг. 2) с формирователя (фиг. 1) подаются на управляющие электроды закрытой группы 7 вентилей. Вентили открываются и на якорную обмотку электродвигателя 8 поступает выпрямленное напряжение О (фиг.2 ) противоположного от первоначального знака. Время действия выпрямленного напряжения будет пропорционально времени следования импульсов управления.Так осуществляется способ управления вентильными группами в следящей системе. Периодически открывается выпрямительная и инверторная группа вентилей, подавая на нагруз-, ку выпрямленные напряжения разного ;знака. На нагрузке. выделяется среднее выпрямпенное напряжение.Так как гармонический сигнал на входе симметричен,.время следоваФормула изобретения Способ управления вентильнымигруппами следящей системы, состоящийво включении одной выпрямительнойили инверторной группы вентилей споочередным открыванием каждого вентиля работающей группы, о т л и ч аю.щ и й с я тем, что, с целью упрощения способа и линеаризации механической характеристики, поочереднос частотой, на порядок меньший частоты питающего напряжения и с длительностью, пропорциональной величине управляющего сигнала, включаютвыпрямительную и инверторную группывентилей, причем импульсы включенияподают одновременно на все вентилиработающей группы,Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССР .Р 603079, кл. Н 02 Р 5/16, 1977,2. Основы проектирования следя,щих систем. Под ред. Н.А. Лакоты..М., 1978, с. 145. ния миандров напряжения на выходерелейного элемента 3 (фиг. 1), управляющих импульсов на выходе формирователей 4 и 5 и выпрямленногонапряжения. на выходе групп би 7 вентилей будет одинаковым,Исполнительный электродвигатель8 отрабатывает прямоугольники выпрямленного напряжения, выделяя среднее по величине значение напряжения. При равной длительности выпрямленных наряжений среднее значениевыпрямленного напряжения равно нулю,а якорь двигателя совершает малыевысокочастотные колебания относительно нулевого положения. С якорем элек тродвигателя колеблется датчик обрат-ной 9 связи, что приводит к возникновению на его выход(е гармонического напряжения автоколебаний,При подаче на вход управляющего Ясигнала в следящей системе возникает сигнал ошибки АО (фиг, 3),который смещает гармонические колебания О на входе релейного элемента 3 относительно нулевого положения. Изменяется длительность миандров разнополярныхпрямоугольных напряжений 0 на выходе релейного элемента, а, следовательно, длительность. следования управляющих импуль- Зсов 0 и 0. на выходе формирователей 4 и 5 импульсов (фиг, 1) и длительность выпрямленных раэнополярныхнапряжений О( (фиг, 3) на. выходегрупп 6 и 7 вентилей (фиг. 1), Отра- З 5батывая напряжение на якоре, выходной вал электродвигателя 8 вращается со средней скоростью, пропорциональной среднему значению выпрямленного напряжения,Предлагаемый способ имеет более 40простую аппаратурную реализацию засчет исключения четырех формирователей импульсов, шести сумматоров и генератора опорных напряжений. Ко. личество тиристоров в выходных каскадах усилителя может быть сведено до шести.Наличие высокочастотных колебаний при реализации предлагаемого способа позволит линеаризовать нелинейности, в контуре следящей системы и, следовательно, получить линейную механическую и регулировочную характеристики, улучшить динамические характеристики следящей сиатеьаю: расширить диапазон регулирования по скорости, уменьшить ошибку, уменьшить время переходного процесса.1001430 г Составитель А. ФеоФанововалева Техред И.Гергель ЕорректорЛ. Бокш едактор Заказ 1441/72ВНИИП ое 113035 ПП "Патент.", г.ужгород, ул. Проектная Госуд лаы и сква,Тираж б 85рственногообретений иЖ, Раушс Подомитета СССРоткрытийая наб., д. 4/5
СмотретьЗаявка
3304897, 18.05.1981
ТУЛЬСКИЙ ПРОЕКТНО-КОНСТРУКТОРСКИЙ И ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ МАШИНОСТРОЕНИЯ
ДУБОВИК СЕРГЕЙ СЕРГЕЕВИЧ
МПК / Метки
МПК: H02P 13/16
Метки: вентильными, группами, системы, следящей
Опубликовано: 28.02.1983
Код ссылки
<a href="https://patents.su/5-1001430-sposob-upravleniya-ventilnymi-gruppami-sledyashhejj-sistemy.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления вентильными группами следящей системы</a>
Формирователь управляющих импульсов полупроводниковых преобразователей
Номер патента: 957376
Опубликовано: 07.09.1982
Авторы: Анкундинов, Грузов
МПК: H02M 1/08
Метки: импульсов, полупроводниковых, преобразователей, управляющих, формирователь
...9с обратной связью.Формирователь работает следующимобразом, 20Генератор 1 модулирующих импульсовработает на стабилизированной повышен.ной частоте Ги 7 (15-20)Гп, где гпцастота формируемых на выходе устройства импульсов, Однополярные импульсы с выходов генератора подаются навход элемента И 2 каждого канала,на другой вход которого поступают управляющие импульсы О от источникауправляющего напряжения, Одновременно управляющие импульсы поступаютна один из входов ключа 3 управления,на другой вход которого подаютсяимпульсы генератора, промодулированные по частоте следования управляю 35щих импульсов в элементе И. Ключ 3преобразует импульсы управления вдвухполярные импульсы, модулированные частотой генератора, и подает ихна вход...
Формирователь импульсов для управления группой тиристоров
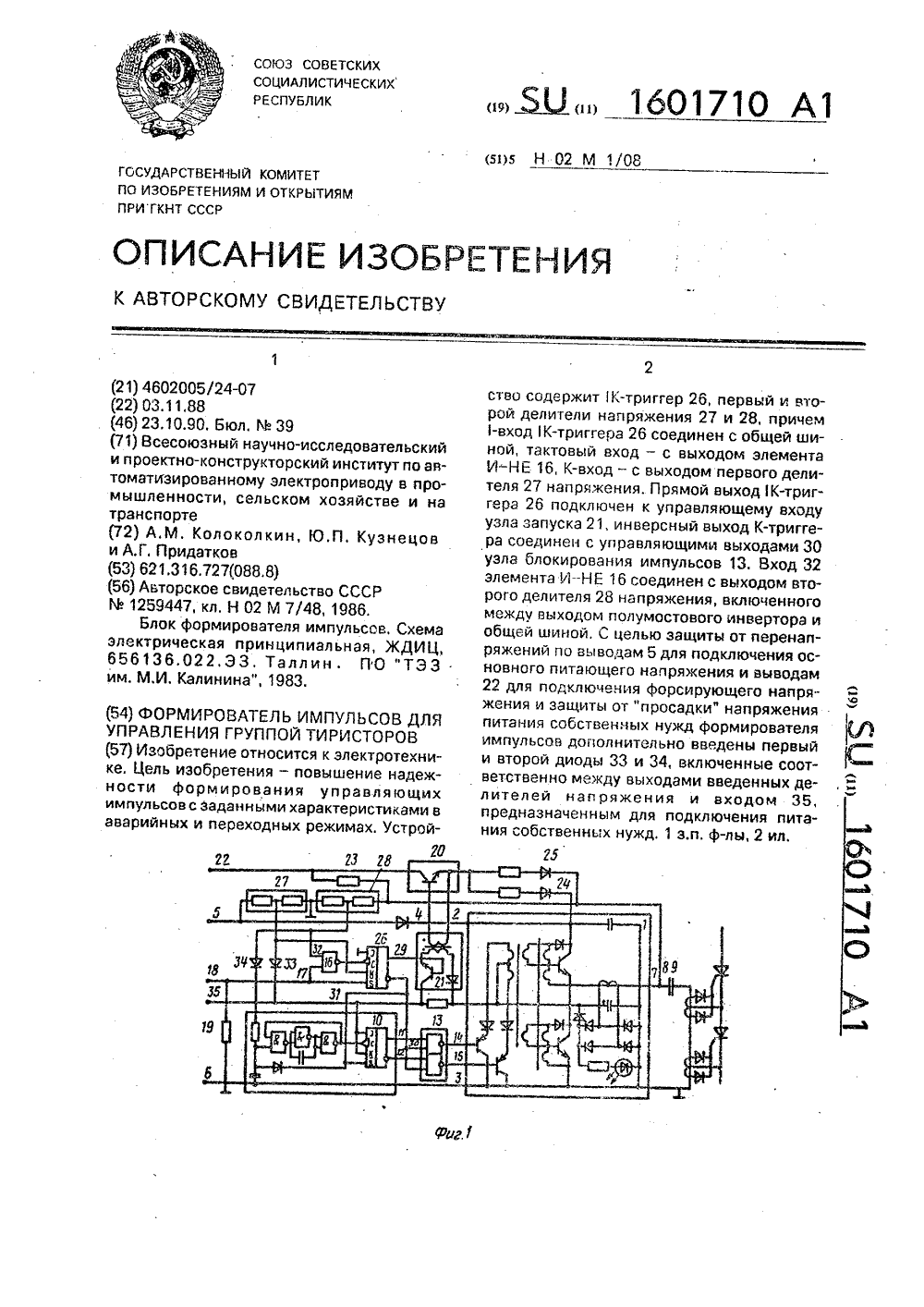
Номер патента: 1601710
Опубликовано: 23.10.1990
Авторы: Колоколкин, Кузнецов, Придатков
МПК: H02M 1/08
Метки: группой, импульсов, тиристоров, формирователь
...и, как правило, составляет величину порядка 50-100 кГц,Так как управляющий ключ 20 в процессе работы формирователя импульсов закрыт,напряжение на выходе формирователя им. пульсов снижается до уровня, соответствующего основному питающему напряжению.Изменение напряжения на входе полумостового инвертора и его выходе приведены на диаграммах 43 и 44, Формауправляющего тока тиристорами показанана диаграмме 46. Длительность работы формирователя импульсов с напряжением навходе, равном основному питающему напряжению, практически неограничена, чтопозволяет формирователь широкие управляющие импульсы для тиристоров, соответствующие длительности первичногоуправляющего импульса 36,После окончания первичного управляющего импульса К-триггер 26...
Способ стабилизации напряжения на выходе управляемого выпрямителя

Номер патента: 295174
Опубликовано: 01.01.1971
Авторы: Куницын, Научно, Отруб
МПК: H02M 7/12
Метки: выпрямителя, выходе, стабилизации, управляемого
...выпрямителя, в котором реализован предлагаемый способ стабилизации.Выпрямитель содержит управляемый вентиль 1, КС-фильтр (2, 8), нагрузку 4. К первичной обмотке анодного трансформатора б подключен вход устройства б ограничения и дифференцирования питающего напряжения. Выход устройства б через разделительный конденсатор 7 связан с амплитудно-временным преобразователем на лампах 8 - 11. Подбором емкости 12, резистора 13 и режима лампы 11 устанавливается необходимыи коэффициент преобразования. С выхода амплитудно-временного преобразователя сигнал через формиро.5 ватель 14 и усилитель 15 поступает на управляющий электрод вентиля 1.При работе выпрямителя на выходе устройства б в начале каждого рабочего полупериода формируется...
Способ управления узкими импульсами высоковольтным тиристорным вентилем с лавинными ограничителями

Номер патента: 608401
Опубликовано: 15.05.1985
Авторы: Башкатов, Гринштейн, Жмуров
МПК: H02H 3/24
Метки: вентилем, высоковольтным, импульсами, лавинными, ограничителями, тиристорным, узкими
...в высоковольтных вентилях чувствительность оказывается недостаточной в тех случаях, когда выключаетсянебольшое число тиристоров.Цель изобретения - повысить надежность вентиля путем предотвращенияпробоя отдельных тиристорных ячеекВ режиме прерывистых токов и В переходных режимах.Это достигается тем, что по предложенному способу управления узкимиимпульсами высоковольтным тиристорным вентилем с лавинными ограничителями с помощью системы следящего импульса, заключающемся в том, что взоне регулирования следят эа состоянием вентиля и формируют основныеи дополнительные импульсы управления 55тиристорамп вентиля, в зоне регулирования определяют наличие прямого силового тока через вентиль после его выключения на временном интервале,...
Формирователь управляющих импульсов постоянного тока

Номер патента: 993452
Опубликовано: 30.01.1983
Автор: Михайлов
МПК: H03K 5/04
Метки: импульсов, постоянного, управляющих, формирователь
...обмотка трансформатора .3 тока - зарядный резистор 4, обладающий достаточно большим сопротивлением. При подаче на управляющий элект" род тиристора 6 (через стабилитрон 20) запускающего импульса от блока 23 запуска происходит перезаряд кон" денсатора 5 через включившийся тиристор 6 и катушку 7 индуктивности.В результате колебательного процесса, при приложении к катоду тиристора 6 обратного напряжения от перезарядившегося конденсатора 5, тиристор 6 некоторое время, пока происходит восстановление его запирающих свойств в обратном направлении, пропускает ток, обусловленный рассдсыванием неосновных носителей,В момент обрыва обратного тока тиристора 6 энергия, запасенная в магнитном поле катушки 7 индуктив" ности, вызывает протекание...
Предыдущий патент: Способ управления широтно-импульсным регулятором переменного напряжения
Следующий патент: Устройство для управления выпрямителем
Случайный патент: Модификатор