Цифровая система программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
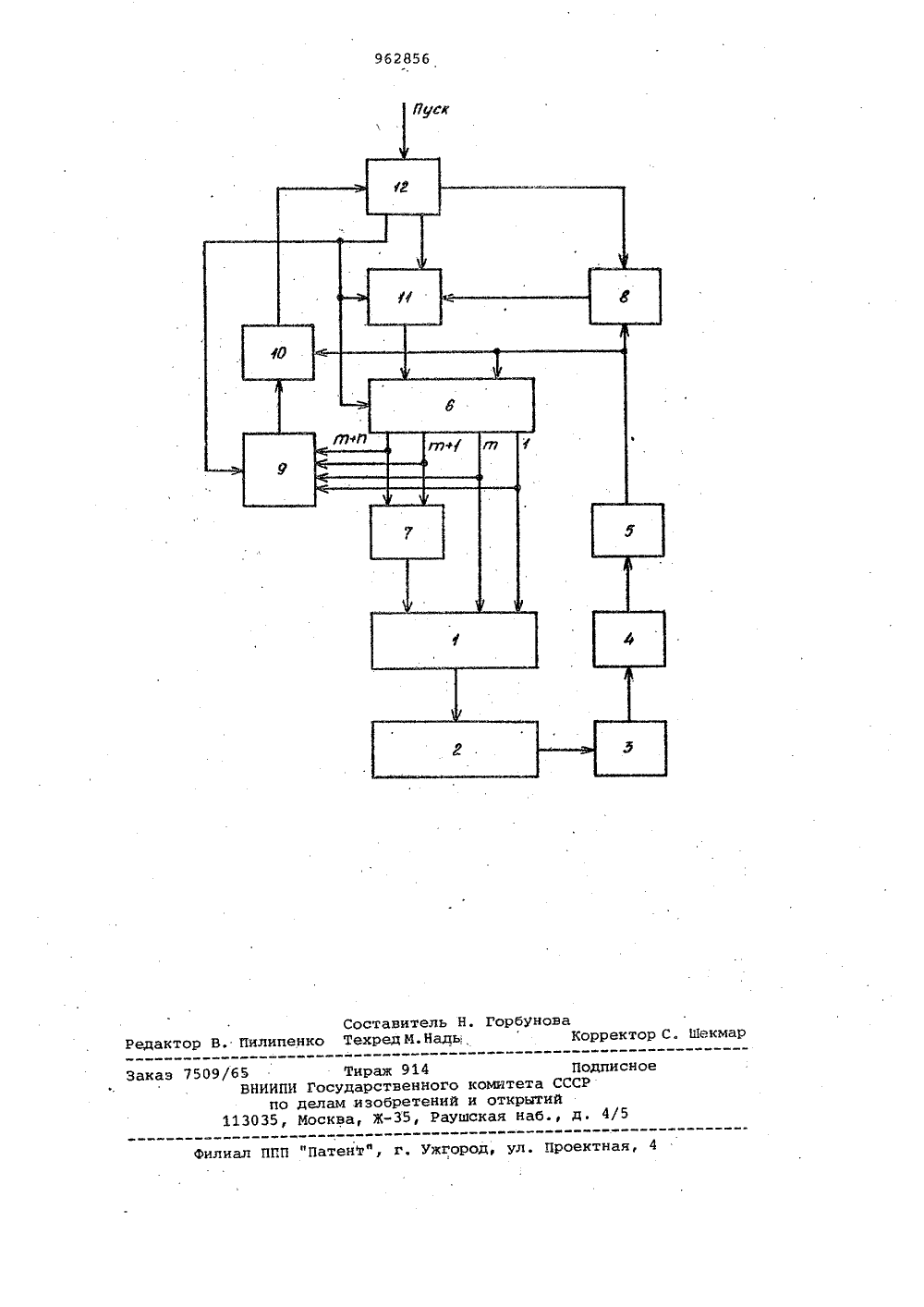
ОПИСАНИЕ ИЗОБРЕТЕНИЯ Союз СоветскихСоциалистическихРеспублик К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(22) Заявлено 270281 (21) 3251703/18-24с присоединением заявки Мо(23) ПриоритетОпубликовано ЗОЯ 9.82. Бюллетень МЗ 6Дата, опубликования описания 30.09.82 5) М. Кп.зС 05 В 19/18 Государственный комитет СССР по делам изобретений и открытий(54) ЦИФРОВАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ Изобретение относится к регулирую-щим и управляющим системам общегоназначения, в частности к цифровымсистемам программного управления,и может быть использовано для управления кранами-штабелерами, лифтами,подъемниками и другими подвижными .объектами с определенным количествомпунктов адресования.По основному авт. св. иэвестнацифровая система программного управления, содержащая последовательновключенные преобразователь код - напряжение, блок управления обратнойсвязи и сумматор, второй вход которого соединен с выходом блока заданияпрограммы, а выходы старших разрядовкоторого подключены к элементу ИЛИ,логический блок выделения старшегоразряда, один вход которого соединен с выходом элемента ИЛИ, а другиевходы которого соединены с соответствующими выходами младших разрядовсумматора, а выходы которого соединены с соответствующими входами преобразователя код - напряжение,Известная система позволяет с высокой точностью производить автоматическое управление подвижным объектом, и, при приближении к заданному адресу, осуществлять плавное торможение объекта путем снижения подаваемого на блок управления управляющего напряжения.Недостатком известной системы является отсутствие возможности осуществлять плавный разгон объекта, Этообусловлено тем, что при пуске объекта на преобразователь код - напряжение с логического блока выделениястаршего разряда подается старшийразряд . кода разности текущего и заданного адресов положения подвижного объекта и на выходе преобраэова- ,5 теля код - напряжение получаетсянапряжение, соответствующее максимальной скорости перемещения объекта. Таким образом, разгон осуществляется с максимально достижимым подвижным объектом ускорений. Ускорение, возникающее при разгоне, может значительно превышать допустимые для данного подвижного объекта или перевозимого груза, что приводит к снижению надежности и срока службы объекта. Кроме того, если оператор находится на подвижном объекте и перемещается вместе с ним, возникающее при разгоне ускорение может эначи 962856тельно превосходить допустимые длячеловека нормы.Цель изобретения - расширение Функциональных возможностей системы,т.е. получение возможности осуществлять плавный программируемый разгон подвижного объекта.Поставленная цель достигаетсятем, что в цифровую систему программного управления, содержащую последовательно соединенные преобразова.тель код - напряжение, усилитель,блок управления, датчик обратной связи и сумматор, вход которого соединен с выходом блока задания программы, а выходы старших разрядов сумматора подключены к входам элементаИЛИ, логический блок выделения старшего разряда, один вход которогосоединен с выходом элемента ИЛИ, адругие входы соединены с соответствую 20шими выходами младших разрядов сумматора, выходы логического блока выделения старшего разряда подключенык соответствующим входам преобразователя код - напряжение, введенысхема сравнения, коммутатор буферныйрегистр и регистр начального адреса, подключенный первым входом квыходу. датчика обратной связи, вторым входом - к второму выходу блоказадания программы, а выходом - кпервому входу коммутатора, связанного вторым входом с третьим выходомблока задания программы, выходом -с третьим входом сумматора, а третьим входом - с первым выходом блоказадания программы и с первым буферного регистра подключенного вторымивходами к соответствующим выходамсумматора, а выходом - к первомувходу схемы сравнения, соединенной 40вторым входом с выходом датчика обратной связи, а выходом - с входомблока задания программы,На чертеже дана блок-схема систеМы е 45Система содержит логический блок1 выделения старшего разряда, преобразователь 2 код-напряжение, усилитель 3, блок 4 управления, датчикобратной связи 5, сумматор б, элемен 50ИЛИ 7; регистр 8 начального адреса,буферный регистр 9, схему 10 сравнения, коммутатор 11, блок 12 заданияпрограммы.Система работает следующим образом.После набора заданного адресаи подачи команды фПуск" с блока 12задания программы на регистр начального адреса подается команда, по которой в регистр 8 начального адреса 60записывается с датчика 5 обратнойсвязи код начального адреса объекта.По второй команде, поступающейс блока 12 задания програьаиы накоммутатор 11, сумматор б и буФерный 65 регистр 9, на входы сумматора б подаются значения кода начального адреса Ао с датчика 5 обратной связи и, с блока 12 задания программы через коммутатор 11, значения кода заданного адреса В. Сформированный в сумматоре б код адреса с пути ( в р г в ) записывается и хранитсяА + Вв буферном регистре 9,После этого блок 12 задания программы выдает команду, по которой на вход сумматора б через коммутатор 11 подается значение кода начального адреса .АО с регистра 8 начального адреса, На выходе сумматора 7 формируется разность кода текущего адреса А с датчика 5 обратной связи и кода начального адреса Ао с регистра 8 начального адреса и к полученной разности прибавляется единица:А 1 - Ао+ 1.Так как в момент начала движения кода текущего начального адресов разны, на вход преобразователя 2 код - напряжение через логический блок 1 выделения старшего разряда подается сформированный на сумматоре б младший разряд кода разности.Преобразователь 2 код - напряжение через усилитель 3 выдает напряжение, .соответствующее минимальной скорости перемещением объекта, на блок 4 управления, перемещающий объект. При движении объекта код текущего адреса, подаваемый на вход сумматора 6 с датчика 5 обратной связи, меняется, а разность кодов, подаваемая с выхода сумматора б через логический блок 1 выделения старшего разряда на вход преобразователя 2 код - напряжение, увеличивается. В результате преобразователь 2 код - . напряжение поочередно выдает через усилитель 3 на блок 4 управления возрастающее напряжение, образующие гистограмму закона разгона устройства.:, Разгон устройства продолжается до тех пор, пока в коде разности текущего и начального адресов не появляется а + 1 разряд, Так как разряди с а+1 по а+и подаются на логический блок 1 выделения старшего разряда через элемент ИЛИ 7, напряжение на выходе преобразователя 2 код - напряжение при наличии любого из этих разрядов становится максимальным. При этом устройство двигается с постоянной максимальной скоростью. В схеме 10 сравнения производится сравнение кода адреса середины пути, хранимого в буферном регистре 9 и кода текущего адреса, поступающего с датчика 5 обратной связи.При совпадении этих кодов схема 10 сравнения вырабатывает сигнал, подаваемый на блок 12 задания программы. По этому сигналу блок 12 зада. ния программы выдает команду на.коммутатор 11, сумматор б. По этой ко-, манде коммутатор 11 переключается и на третий вход сумматора б с блока 12 задания программы подается код заданного адреса. Сумматор б формирует код разности заданного и текущего адресов.При наличии в полученном коде разности разрядов, больших а, устройство продолжает двигаться с постоянной максимальной скоростью,так как указанные разряды подаются с сумматора б на логический блок 1 выделения старшего разряда через элемент ИЛИ 7. При дальнейшем движении объекта код разноСти заданного и текущего адресов уменьшается. Как только в нем остается а младших разрядов, начинается торможение объекта. Логический блок 1 выделения старшего разряда поочередно выдает старшие разряды разности адресов на преобразователь 2 код-напряжение, который поочередно выдает заданные напряжения, образующие гистограмму закона торможения объекта.,Таким образом, указанная совокупность. признаков позволяет расширить функциональные возможности системы,т.е. осуществлять плавный программируемый разгон подвижного объекта,что повышает качество работы подвиж"ного объекта,По сравнению с известными устройствами предлагаемая цифровая системапрограммного управления позволяет5 избежать при разгоне перегрузок подвижного объекта, действующих на грузи оператора, что в конечном счете ведет к расширению области примененияустройства.10формула изобретенияЦифровая система программного.подключенный первым входом к выходудатчика обратной связи, вторым входом - к второму выходу блока заданияпрограммы, а выходом - к первомувходу коммутатора, связанного вторымвходом с третьим выходом блока задания программы, выходом - с третьимвходом сумаатора, а третьим входомс первым. выходом блока задания программы и с первым входом буферногорегистра, подключенного вторыми входами к соответствующим выходам сумматора, а выходом - к первому входусхемы сравнения, соединенной вторымвходом с выходом датчика обратнойсвязи, а выходом - с входом блоказадания программы.9 б 2856 СоставительТехредМ.Надь илипенк едакто Закаэ илиал ПГП "Патенг", г. Ужгород, ул. Проектная, 4 9/б 5 Тираж 914 ВНИИПИ Государственного по делам иэобретений 113035, Москва, Ж, РаушГорбуноваКорректор С. Шекма Подписноемитета СССРоткрытийая наб., д. 4/5
СмотретьЗаявка
3251703, 27.02.1981
ПРЕДПРИЯТИЕ ПЯ Г-4287
РОГОВОЙ ВАДИМ ЛЕОНИДОВИЧ, БОРИСОВ СЕРГЕЙ ЛЬВОВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: программного, цифровая
Опубликовано: 30.09.1982
Код ссылки
<a href="https://patents.su/4-962856-cifrovaya-sistema-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Цифровая система программного управления</a>
Преобразователь напряжение-код

Номер патента: 340078
Опубликовано: 01.01.1972
Авторы: Институт, Каленчук, Коробейников, Кургаев, Олен
МПК: H03M 1/48
Метки: напряжение-код
...этого разряда. На этосом синхропоте 1 нциале, прошедшем через схе 1 му И 23 (либо 24) блока 9 выделения разности, в зависимости от состояния блошка 1 сравнения т 1 риггера 8 знака разности устанав 10 20 25 30 35 40 45 50 55 60 65 ливается нулевое либо единичное состояние,Танским образом, определяется знак разности, так как началыное состояние блока 1 сравпения свидетельствует о эпаке разности У - У,ь где У, - напряжение входного сиг. нала, У - компен 1 сационное напряжение соответству 1 ощее коду рееверсивнога счетчика,су 1 мматора 4. На блок 1 сравнения накладывается условие неизменности состояния вовремени переходных процессов в 1 ревер 1 сивном счетчике-суяматоре 4. Однов 1 ременно сипнал с выхода схемы И 23 (или 24) проходит через...
Преобразователь «напряжение— код».

Номер патента: 209086
Опубликовано: 01.01.1968
Авторы: Касперович, Патерикин, Твердохлеб, Электрометрии
МПК: H03M 1/38
Метки: код, напряжение
...не будет), после чего Ж станет равным 7 Л, а счетчик переключится на вычитание.Импульс с последней шины распределителя переведет триггер 13 из состояния 1 в О. Счетчик по-прежнему будет работать на вычитание.Импульсом с последней шины будет также запущено реле времени 7, которое обеспечит вычитание из счетчика 4 еще одной единицы. При этом последний триггер 13 снова перейдет в состояние 1 и переведет тем самым тритгер 12 в состояние О.Компенсационное напряжение ГЛ при этом будет равно 5 Л, Одновременно с появлением импульса на последней шине распределителя запускается кипп-реле 20 и через схему ИЛИ 21 переводит триггер 18 в состояние 1, На этом первое измерение импульса заканчивается, После этого при подаче синхроимпульса, разрешающего...
Преобразователь неэлектрических величин в цифровой код

Номер патента: 639140
Опубликовано: 25.12.1978
Автор: Парфенов
МПК: H03K 13/20
Метки: величин, код, неэлектрических, цифровой
...помех и в первую очередь в его входной цепи, Поэтому в выходном сигнале интегратора 6, а поспе преобразования и в полученном интервале времени 1содержится некоторая ошибка. После окончания первого попуцикпа преобразоиация сигнал с компаратора 11 и блока 12 управления через элемент 13 совпадения попадает на счетный вход триггера 22 и изменяет его состояние на противоположное. Значит, если раньше, в переключателе 21 полярности бып от крыт транзистор 23, а через резистор 28 - транзистор 26, то теперь открывается транзистор 24, а через резистор 27 - транзистор 25, Таким образом попярВОсть напряжения питания датчика 1 на в грузки поменялась на противоположную, 639140а значит изменилась полярность выходного сигнала датчика 1 нагрузки н...
Устройство для дифференциальной защиты трансформатора с регулированием напряжения под нагрузкой
Номер патента: 688945
Опубликовано: 30.09.1979
Авторы: Ванин, Майоров, Уляницкий
МПК: H02H 3/26
Метки: дифференциальной, защиты, нагрузкой, регулированием, трансформатора
...преобразоватеединенные контакты ключей управления ля 18, осуществляющий управление по цевыключателями другого напряжения всех 60 пям тока (БИНТ) 30, и блок для измене- трансформаторов, третий вход подключен ния коэффициента передачи во вторичных к формирователю модуля, подключенного цепях регулируемого плеча по цепям нак сумматору напряжений, пропорциональ- пряжения - БИНН 31.ных токам нагрузки защищаемого транс- Блок БИНТ 30 состоит из сумматора 32 форматора, а выход блока изменения ко- (Б напряжений, пропорциональных токам на 6889455грузки 32, входы которого подключены к выходам преобразователей 19, 20, формирователя модуля (ФМ) 33, подключенного к выходу сумматора 32, формирователя модуля 34, подключенного к преобразователю 18...
Способ регулирования паросодержания холодильного агента на выходе из объекта охлаждения
Номер патента: 714110
Опубликовано: 05.02.1980
Авторы: Аксенов, Алешин, Калугин, Кошкин, Сысоев
МПК: F25B 49/00
Метки: агента, выходе, объекта, охлаждения, паросодержания, холодильного
...соленоидный вентиль 3, ис-точник 4 светового потока, фотоэлемент 5, прозрачный участок б трубопровода 7 для выхода паров хладагента, усилитель 8,Установка работает следующим образом.Жидкий хладагент подается в испаритель 1 по трубопроводу 2 черезсоленоидный вентиль 3. Пары хладагента выходят из испарителя 1 по трубопроводу 7, на котором выполнен прозрачный участок б, Через участок бпропускается от источника 4 световой поток, интенсивность которогорегистрируется фотоэлементом 5. Еслив потоке паров хладагента отсутствуют капли жидкого хладагента, то интенсивность светового потока повышается. При этом импульс, отходящийот фотоэлемента, усиленный в усилителе 8, действует на открытие солено"идного вентиля 3 и подача жидкогохладагента...
Предыдущий патент: Устройство для управления объектом
Следующий патент: Устройство для двухкоординатного программного управления
Случайный патент: Устройство для выравнивания яркости отдельных изображений