Приспособление для съема плодов с деревьев
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 948329
Автор: Дворянидов
Текст
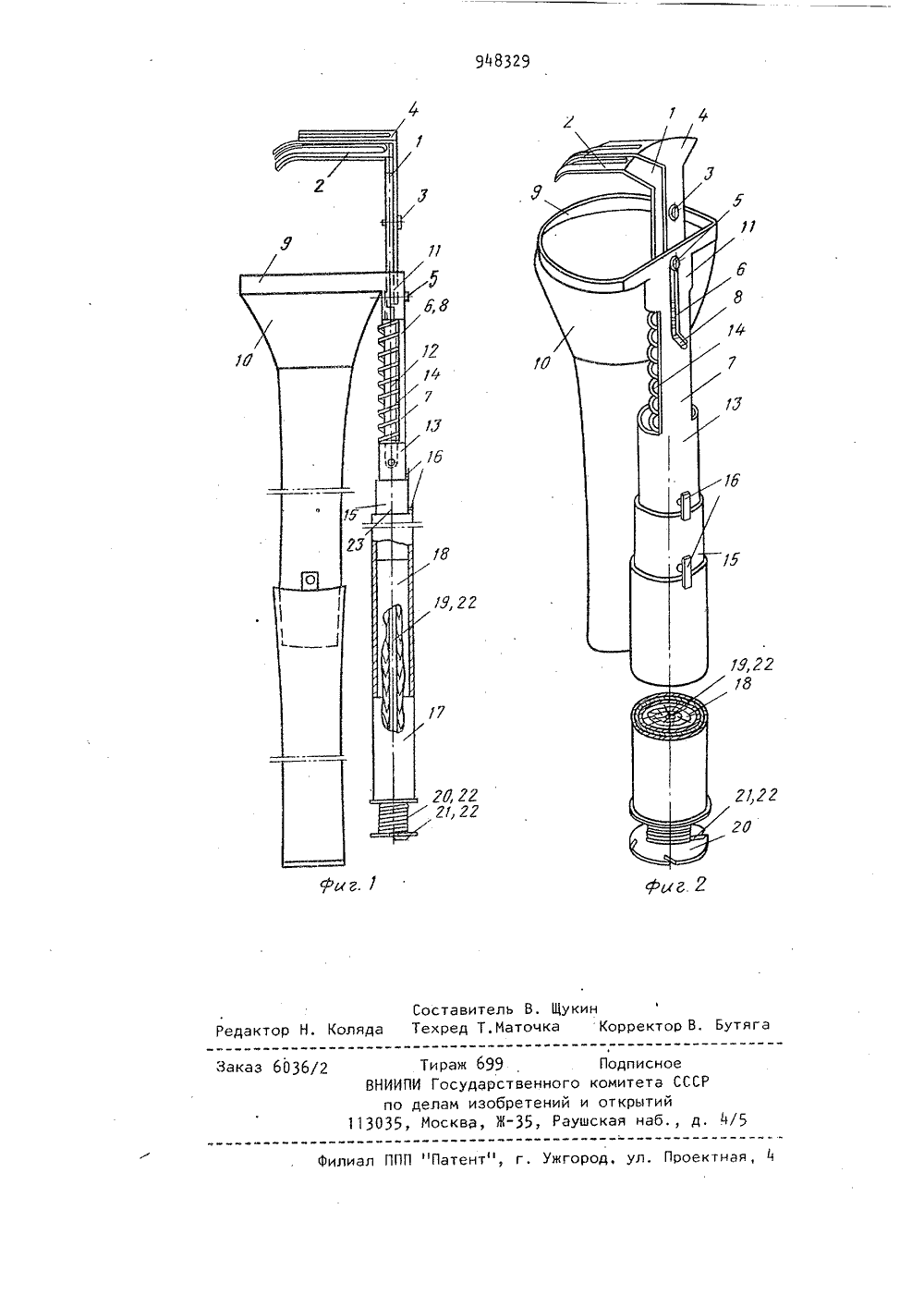
О П И С А Н И Е ( 948329ИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советски кСоциалистически кРеспублик(23)приоритет до делам изобретений и открытийОпубликовано 07,08,82. Бюллетень 29 Дата опубликования описания 07.08.82 72) Автор изобретен орянидо заявител(54) ПРИСПОСОБЛЕНИЕ ДЛЯ СЪЕМА ПЛОДОВ С ДЕРЕВЬЕВ я к сельско. съем ъемник, в оиств Недостатком данного ус вляется низкая производи рос, натянутый параллель льность: штанге,Изобретение относитсхозяйственным машинам, а именно, кустройствам для сбора плодов,Известно приспособление для аплодов, включающее режущий аппарат,штангу, пневмопроводы и плодосборник1.Недостатками инструмента являютсясложность наведения режущего аппарата на плодоножку, повреждение плодоврежущим аппаратом и невозможностьсобирать плоды с высоких деревьев.Наиболее близким к изобререниютехническим решением является приспособление для съема плодов с деревьев, включающее штангу, смонтированные на ней подвижный гребенчатый .нож, гребенчатый противорежущийнож, гибкую тягу для перемещенияножа и пружину его возврата 2. затрудняет внедрение приспособленияв крону дерева, плодоножки срезанных плодов получаются различной длины, кроме того, невозможно собиратьплоды с деревьев различной высоты.5Цель изобретения - повышениепроизводительности труда,Это достигается тем. что подвижный и противорежущий ножи шарнирносвязаны между собой, причем штангаимеет фигурный паз, а противорежущий нож - палец, который расположенв пазу, кроме того, штанга выполнена телескопической и снабжена ка тушкой для гибкой тяги. На фиг, 1 изображен плодос вид сбоку; на фиг. 2 - то же, аксонометрической проекции.Плодосъемник состоит из режущего устройства, в которое входит гребен чатый нож 1, имеющий в верхней части горизонтально расположенные паль цы 2, Концы пальцев 2 подогнуты вниВ верхней части к корпусу 7 крепится кольцо 9, которое удерживает секционный эластицыый рукав 10 Верхняя часть рукава, присоединяющаяся к кольцу 9, имеет приемную емкость рукава. Рукав состоит из отдельных секций, Ниже кольца 9 корпус 7 имеет продолговатый хомут 11, в котором перемещаются подвижный гребенчатый нож 1 и гребенчатый нож 1, Гребенчатый нож 1 вниз оканцивается подпружиненным стержнем 12, который нижним концом входит во втулку 13 корпуса 7 На стержень 12 надета пружина 11, которая поддерживает ножи 1 и в верхнем положении. Для этого пружина 1 ч верхним концом упирается в гребенчатый нож 1, Пружина нижним концом закреплена во втулке 13. Втулка 13 входит во втулку 15 большего диаметра, и они образуют телескопическую штангу, При выдвинутом положении втулок телескопической штанги они фиксируются пружинными защелками 16, Внизу телескопическая штанга оканчивается рукояткой управления 17, которая вверху имеет стержень 8. Стержень свободно входит во втулку 15 телескопической штанги. Рукоятка по оси имеет канал 19. Внизу рукоятка оканчивается катушкой 20 с нижним бортиком, имеющим пазы 21. Пазы 21 служат для фиксирования определенной длины гибкой тяги ручного привода 22. Одним концом гибкая тяга ручного привода намотана на катушку 20. Гибкая тяга 23 ручного привода проходит через паз 21, в канале 19, во втулке ЗО 35 40 45 50 для лучшего удерживания плода. Пальцы 2 расположены по окружности. 8центре окружности на гребенчатом ноже 1 крепится ось 3. На оси 3 крепится подвижной гребенчатый нож 1, пальцы которого находятся сверху пальцевгребенчатого ножа и плотно прилегают к ним. Пальцы подвижного гребенчатого ножа с левой стороны имеют лезвия, а пальцы гребенчатого ножаиграют роль противорежущих пластин.На нижнем конце подвижный гребенчатый нож 4 имеет палец 5, которыйпомещается в пазу 6 корпуса 7 плодосъемника. Паз 6 в нижней части имеет изгиб 8. При помощи оси 3, пальца 5 и паза 6 с изгибом 8 осуществляется возвратно-поступательное ирадиальное движение рабочих органовзахватно-режущего устройства. 5 1 О 15 2 О 25 13 и присоединяется к подпружиненномустержню 12,Работает плодосъемник следующимобразом.В зависимости от высоты дерева устанавливается длина телескопическойштанги и длина секционного эластичного рукава 10. Вначале подбираетсятакая длина, которая позволит удобнособирать плоды с нижних ветвей дерева, После этого длина штанги и рукава 10 все время увеличивается длясбора плодов, расположенных выше.Для удаления телескопической штангидостаточно.выдвинуть втулку штангии зафиксировать ее защелкой 16. Перед удлинением штанги сначала удлиняется гибкая тяга 23 ручного привода22. Тяга 23 удлиняется следующим образом,Нижний конец тяги 23 выводитсяиз паза 21 катушки 20 и разматываетсяс катушки. После того как определенадлина штанги, тягу 23 подгоняют подэту длину и фиксируют в прорези,Для удлинения рукава 10 надо следу.ющую секцию надеть на последнюю изакрепить. Режущее устройство заводится над плодом, Плодоножкавходит между пальцами гребенчатыхножей 1 и ч. После этого за рукоятку управления 17 гибкая тяга 23ручного управления 22 перемещаетсявниз, Тяга 23 тянет за собой подпружиненный стержень 12, который сжимает пружину 1 ч, Режущее устройствоприближается к кольцу 9. Плод входит в приемную емкость рукава 10,Палец 5 первоначально перемещаетсяв вертикальной части паза 6. После,того как плод окажется в приемнойполости рукава 10, палец 5 попадаетв изгиб 8 прорези и начинает двигаться вниз и вправо. Тем самым подвижный гребенчатый нож на оси 3 начинает поворациваться против часовойстрелки и пальцы его перемещаютсявлево; Пальцы гребенчатого ножа, передвигаясь, своими лезвиями прижимаютплодоножку к пальцам подвижного гребенчатого ножа и перерезают ее. Плодпо рукаву 10 попадает в тару,После этого освобождается рукоятка 17 и режущее устройство под воздействием пружины 14 возвращается в верхнее положение, При этом палец 5, двигаясь в обратном направлении в изгибе 8, поворачивает подвиж5ный гребенчатый нож по часовой стрел ке в исходное положение. После этого цикл повторяется.Применение плодосъемника позволит повысить производительность труда, уменьшить повреждения снимаемых плодов и снимать плоды с деревьев различной высоты.формула изобретения1. Приспособление для съема пло.дов с деревьев, включающее штангу смонтированные на ней подвижный гребенчатый нож, гребенчатый противорежущийнож, гибкую тягу для перемещения последнего и пружину его возвра 948329 6та, о т л и ч а ю щ е е с я тем,что, с целью повышения производительности труда, подвижный и противорежущий ножи шарнирно связаны междусобой. причем штанга имеет фигурныйпаз, а гребенчатый противорежущийнож - палец, который расположен впазу.2. Приспособление по и. 1, о т 10 л и ч а ю щ е е с я тем, чтоштанга выполнена телескопической иснабжена катушкой для гибкой связиИсточники информации,принятые во внимание при экспертизе5 1. Авторское свидетельство СССРМ 314489, кл. А 01 О 46/24, 1971.2. Авторское свидетельство СССРН 414977, кл. А 01 О 46/24, 1974.9 ч 8329 2 Составитель В, ЩукинРедактор Н, Коляда Техред Т.Маточка Корректор В Заказ 6036 Филиал ППП "Патент", г, Ужгород, ул. Проектна Тираж 699 ВНИИПИ Государственного по делам изобретений 13035, Москва, Ж, РауПодписноекомитета СССР открытийская наб., д.
СмотретьЗаявка
3278969, 23.04.1981
заявитель А. Г. Дворянидов ( ПРИСПОСОБЛЕНИЕ ДЛЯ СЪЕМА ПЛОДОВ С ДЕРЕВЬЕВ
ДВОРЯНИДОВ АЛЕКСАНДР ГАВРИЛОВИЧ
МПК / Метки
МПК: A01D 46/247
Метки: деревьев, плодов, съема
Опубликовано: 07.08.1982
Код ссылки
<a href="https://patents.su/4-948329-prisposoblenie-dlya-sema-plodov-s-derevev.html" target="_blank" rel="follow" title="База патентов СССР">Приспособление для съема плодов с деревьев</a>
Устройство для сбора с деревьев шишек, плодов и т. п.
Номер патента: 79704
Опубликовано: 01.01.1949
Автор: Рыжков
МПК: A01D 46/247
Метки: деревьев, плодов, сбора, шишек
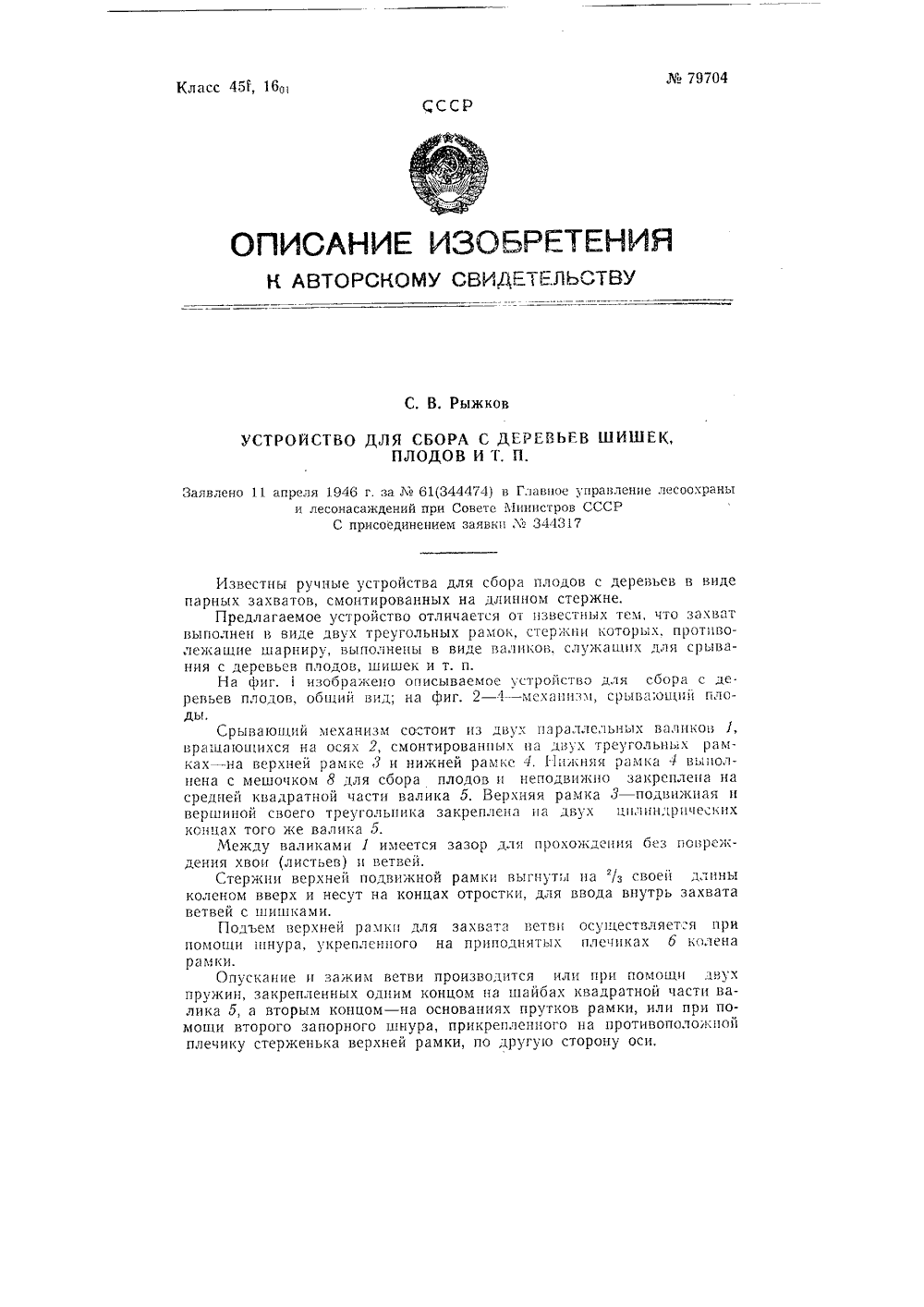
...двух цилшЛрических концах того же валика 5.Между валиками 1 имеется зазор для прохождения без повреждения хвои (листьев) и ветвей.Стержни верхней подвижной рамки выгнуты на /з своей длины коленом вверх и несут на концах отростки, для ввода внутрь захвата ветвей с шишками.Подъем верхней рамки для захвата ветви осуществляет:я при помощи шнура, укрепленного на приподнятых пле 1 нках б колена рамки.Опускание и зажим ветви производится или при помощи двух пружин, закрепленных одним концом на шайбах квадратной части валика 5, а вторым концом - на основаниях прутков рамки, или при помощи второго запорного шнура, прикрепленного на противоположнойплечику стерженька верхней рамки, по другую сторону оси,.й 79704Подъе 5 ный и запорный шнур...
Устройство для ручного сбора плодов с деревьев

Номер патента: 1819529
Опубликовано: 07.06.1993
Авторы: Бондаренко, Сергеев
МПК: A01D 46/24
Метки: деревьев, плодов, ручного, сбора
...левого пальца со стороны выемки выполняет функции неподвижного ножа или, как в примере конкретного выйолнения, приведенном на фиг.1, к первому пальцу крепится неподвижный нож 12 с помощью заклепки 13, Подвижный Г-об.разный нож 14 крепится к неподвижному ножу шарнирным соединением(винтом 15 с гайкой 16). С одной стороны Г-образный "нож 14 подпрукинен пружиной 17, присоединенной к втулке 6, другой отогнутый конец Г-образного ножа 14 соединен с помощью гибкой тяги 18 с рукояткой. Для более надежной работы подвижного Г-образного ножа 14 тяга 18, в качестве которой может быть использована леска, пропущена под скобу 19, укрепленную на шесте 1.Внутренняя сторона поверхности кольцевой горловины 8 для более надежного со- Б хранения плодов от...
Подвижный нож для электробритвы

Номер патента: 371714
Опубликовано: 01.01.1973
Автор: Иностранец
МПК: B26B 19/04
Метки: нож, подвижный, электробритвы
...с возвратно-поступательным движением ножей, содержащий корпус из пластмассы счли армированного стекловолокна и установленные на нем режущие, пластины.Однако такая конструкция не исключает возможности повреждения неподвижного ножа выступающими угловыми краями режущих пластин, особенно если во время работы подвижный нож отходит от нормального положения.С целью предотвращения повреждения не= подвииного ножа корпус предлагаемого подвижного ножа с внешних сторон имеет бортики, в которых утоплены угловые края пежущих пластин. На чертеже изображен предлагаемый подвижный нож для электробритвы, общий вид.Подвижный нож содержит корпус 1, режущие пластины 2, угловые края 8 которых утоплены в бортики 4.Предмет изобретенияПодвижный нож для...
Подвижный нож для электробитвы

Номер патента: 593909
Опубликовано: 25.02.1978
Автор: Бунцис
МПК: B26B 19/04
Метки: нож, подвижный, электробитвы
...кольцо, установленное в канавке торцовой части основания, выполненного с пазами, в которых размещены режущие пластины, шарнирно соединенчые с круговым пружинным кольцом.На чертеже изображен подвижной нож.Устройство имеет основание с пазами 1, 2 Ос установленными в нем самоустанавливаюшимися режущими пластинами 2 на крутовомпружинном кольце 3, стержень 4, служащийдля соединения привода электробритвы с подпружиненными поводками и передачи враще 25 ния подвижному ножу с обеспечением равномерного прижима всех режущих пластин к поверхности неподвижного ножа.Работа осуществляется следующим образом При. бритье режущие пластины 2 не только удерживаются круговым пружинным кольцом 3, но и самоустанавливаются, поворачиваясь вокруг него, всей...
Устройство для срезания деревьев
Номер патента: 448619
Опубликовано: 30.10.1974
Авторы: Кантола, Сааринен, Хаатайя
МПК: A01G 23/08
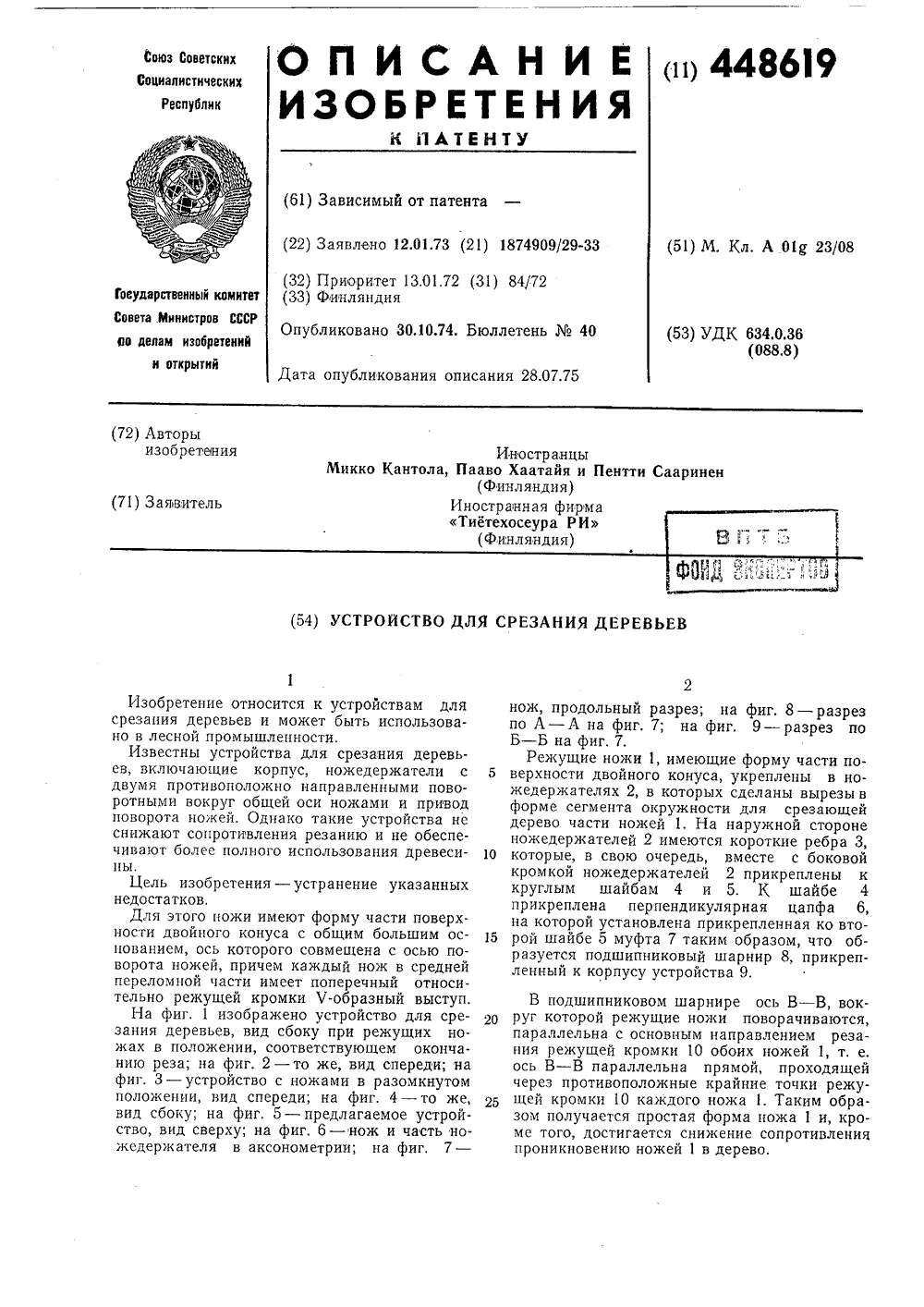
...разомкнутого положения в крайнее замкнутое положение и цаооорот.Оба ножа 1 расположены на части поверхности двойного конуса таким образом, что ось двойного конуса совпадает с осью В - В поворота ножей 1. При этом в средней части ножей 1 образуется Ъ-образный выступ так, что радиус вогнутости профиля ножа 1 в вертикальной плоскости уменьшается по обеим сторонам упомянутого выступа в направлении к краям ножа 1. Наиболее подходящий угол Ч-образного выступа находится в пределах 90 - 160. Благодаря описанной форме ножей 1 и упомянутому выступу достигается клиновое раскалывающее воздействие ца срезаемое дерево, уменьшающее в значительной степени сопротивление проникновению в дерево ножей 1. Раскалывающее воздействие Ч-образного выступа...
Предыдущий патент: Платформа для сбора плодов и обрезки кроны плодовых деревьев
Следующий патент: Ротационный режущий аппарат
Случайный патент: Палец-ловитель