Устройство для программного управле-ния электроннолучевой установки
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
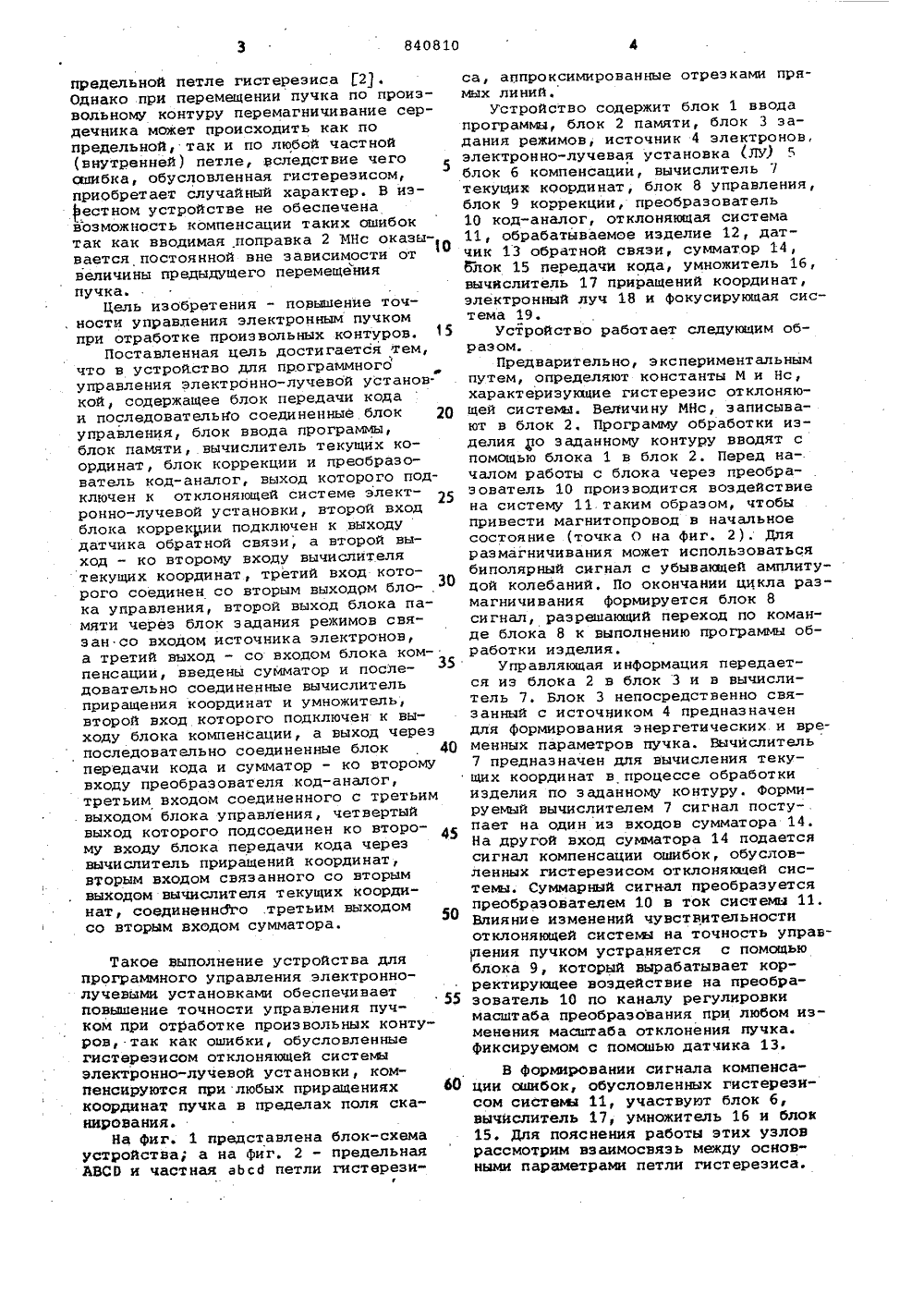
Такое выполнение устройства для программного управления электроннолучевыми установками обеспечивает повышение точности управления пучком при отработке произвольных контуров, так как ошибки, обусловленные гистерезисом отклоняющей системою электронно-лучевой установки, компенсируются при любых приращениях 60 координат пучка в пределах поля сканирования.На фиг. 1 представлена блок-схема устройства; а на фиг. 2 - предельная АВСО и частная аЬсд петли гистврези"Г 55 предельной петле гистереэиса Е 2. Однако при перемещении пучка по произвольному контуру перемагничивание сердечника может происходить как по предельной, так и по любой частной (внутренней) петле, вследствие чего сшибка, обусловленная гистерезисом, приобретает случайный характер. В иэестном устройстве не обеспечена возможность компенсации таких ошибок так как вводимая поправка 2 МНс оказывается постоянной вне зависимости от величины предыдущего перемещения пучка.Цель изобретения - повышение точ, ности управления электронным пучком при отработке произвольных контуров. 15Поставленная цель достигается тем, что в устройство для программного управления электронно-лучевбй установкой, содержащее блок передачи кода и последовательно соединенный блок 20 управления, блок ввода программы, блок памяти, вычислитель текущих координат, блок коррекции и преобразователь код-аналог, выход которого подключен к отклоняющей системе электронно-лучевой установки, второй вход блока коррекции подключен к выходу датчика обратной связи, а второй выход - ко второму входу вычислителя текущих координат, третий вход которого соединен со вторым выходрм бло-, ка управления, второй выход блока памяти через блок задания режимов связан со входом источника электронов, а третий выход - со входом блока компенсации, введены сумматор и последовательно соединенные вычислитель приращения координат и умножитель, второй вход которого подключен к выходу блока компенсации, а выход через последовательно соединенные блок , 40 передачи кода и сумматор - ко второму входу преобразователя .код-аналог, третьим входом соединенного с третьим выходом блока управления, четвертый выход которого подсоединен ко второ му входу блока передачи кода через вычислитель приращений координат, вторым входом связанного со вторым выходом вычислителя текущих координат, соединенного третьим выходом со вторым входом сумматора. са, аппроксимированные отрезками прямых линий,Устройство содержит блок 1 вводапрограммы, блок 2 памяти, блок 3 задания режимов, источник 4 электронов,электронно-лучевая установка (ЛУ) 5блок 6 компенсации, вычислитель 7текущих кОординат, блок 8 управления,блок 9 коррекции, преобразователь10 код-аналог, отклоняющая система11, обрабатываемое изделие 12, датчик 13 обратной связи, сумматор 14,Глок 15 передачи кода, умножитель 16,вычислитель 17 приращений координат,электронный луч 18 и фокусирующая система 19.Устройство работает следующим образом.Предварительно, э кс перимент альнымпутем, определяют константы М и Нс,характеризукщие гистерезис отклоняющей системз. Величину МНс, записывают в блок 2, Программу обработки изделия по заданному контуру вводят спомощью блока 1 в блок 2. Перед началом работы с блока через преобразователь 10 производится воздействиена систему 11 таким образом, чтобыпривести магнитопровод в начальноесостояние (точка О на фиг. 2). Дляразмагничивания может использоватьсябиполярный сигнал с убывакщей амплитудой колебаний. По окончании цикла размагничивания формируется блок 8сигнал, разрешающий переход по команде блока 8 к выполнению программы обработки изделия.Управляющая информация передается из блока 2 в блок 3 и в вычислитель 7. Блок 3 непосредственно связанный с источником 4 предназначендля формирования энергетических и временных параметров пучка. Вычислитель7 предназначен для вычисления текущих координат в процессе обработкиизделия по заданному контуру. Формируемый вычислителем 7 сигнал поступает на один из входов сумматора 14.На другой вход сумматора 14 подаетсясигнал компенсации ошибок, обусловленных гистереэисом отклоняющей системы. Суммарный сигнал преобразуетсяпреобразователем 10 в ток системы 11.Влияние изменений чувствительностиотклоняющей системы на точность управления пучком устраняется с помощьюблока 9, который вырабатывает корРектирующее воздействие на преобразователь 10 по каналу регулировкимасштаба преобразования при любом изменения масштаба отклонения пучка.фиксируемом с помошью датчика 13В формировании сигнала компенсации ошибок, обусловленных гистерезисом системы 11, участвуют блок 6,вычислитель 17, умножитель 16 и блок15. Для пояснения работы этих узловрассмотрим взаимосвязь между основными параметрами петли гистерезиса.Формула изобретения Максимальное отклонение пучка (х) пропорционально максимальному значению магнитной индукции для данного канала отклонения. Ширина петли гистерезиса (2 МНс) отсчитывается по оси входного параметра х , пропорционального ампервиткам возбуждения отклоняющей системы. Частная петля гистерезиса имеет ширину д х и высоту Ь х, Впервом приближении справедливо соотношение10 ХХ: с(МНС)дХ, (1)"ааъгде М = М/х ах - приращение координаты пучка при 5перемещении в одном направлении, вычисленное к моменту смены направленияперемещения,МНс - коэффициент коррекции.Таким образом, в соответствии с(1) для формирования компенсирующего сигнала необходимо определить приращение координаты пучка, отнесенноек моменту смены направления, умножитьполученную величину на коэффициенткоррекции(МНс) и во время смены направления суммировать результируюшуюпоправку с заданной координатной х.При этом знак поправки Дх определяется правилом ь 1 9 п (д х ) = +, если отрицательное направление изменяется на 30положительное, ы дп (х) = - , еслиположительное направление меняетсяна отрицательное.Коэффициент коррекции (МНс) вычисляется в блоке 6 на основании инФормации, передаваемой из блока 2.Величина Ьх вычисляется в вычислителе 17, информационный вход которогоподключен к вычислителю 7, а вход,управления - к выходу блока 8. По ко Оманде с блока 8, вырабатываемой вмомент окончания отработки очередно- .го отрезка траектории перемещенияпучка, вычислитель 17 Фиксирует значение текущей координаты х, запо -минает это значение и сравйивает с 45предыдущим значением х. - 1, соответствующим началу отработки отрезка. Значение величины дх = х- хпередается на один вход умножителя 16другой вход которого поступает величина МНс. Результат умножения подается через блок 15, управляемый сигналом, с вычислителя 17 на вход сумматора 14.55Предлагаемое устройство позволяетв 1,5-2 раза повысить процент выхода годных изделий на этапе электронно-лучевого экспонирования или припроизводстве интегральных схем вмикроэлектронике за счет уменьшения 60поля рассеяния размеров экспонируе"мых элементов и улучшения совмещаемости слоев.дополнительный экономический эф"фект создается также благодаря упрощению программирования электроннолучевой обработки, Исключается необходимость в предварительном упорядочении элементов топологии экспонируемого рисунка с целью уменьшениявлияния гистерезиса отклоняющей систеьы. Кроме того, применение предлагаемого устройства позволяет снизитьтребования к отклоняющей системе,являющейся одним из наиболее ответственных узлов прецизионной электроннолучевой установки. За счет этбго может быть упрощена конструкция установки. устройство для программного управления электронно-лучевой установкой,содержащее блок передачи кода и последовательно соединенные блок управления, блок ввода программы, блокпамяти, вычислитель текущих координат, блок коррекции и преобразователькод-аналог, выход которого подключен к отклоняющей системе электронно-лучевой установки, второй входблока коррекции пОдключен к выходудатчика обратной связи, а второйвыход - ко второму входу вычислителя текущих координат, третий входкоторого соединен со вторым выходомблока управления, второй выход блокапамяти через блок задания режимов связан со входом источника электронов,а третий выход - со входом блока компенсации, о т л и,ч а ю щ е е с ятем, что, с целью повышения точностиустройства, в него введены сумматори последовательно соединенные вычислитель приращений координат и умножитель, второй вход которого подключенк выходу блока компенсации, а выходчерез последовательно соединенныеблок передачи кода и сумматор - ковторому входу преобразователя код-аналог, третьим входом соединенного стретьим выходом блока управления,.четвертый выход которого подсоединенко второму входу блока передачи кодачерез вычислитель приращений координат, вторым входом связанного со вторым выходом вычислителя теку. щих координат, соединенного третьим выходом со вторым входом сумматора,Источники информации,принятые во внимание при экспертизе840810 Составитель И. КолокольцовРедактор Н.Лазаренко Техред Н, Бабинец Л Ив К 0омнтета СССРоткрытийшская наб.,писно Филиал ППП "Патент", г. Ужгород,з 4762/б 8 Тираж ВНИИПИ Государственно по делам изобретени 113035, Москва, И, д, 4/5еевве Проектная
СмотретьЗаявка
2815612, 07.09.1979
ПРЕДПРИЯТИЕ ПЯ А-7638
ГОЛУБКОВ МИХАИЛ ПЛАТОНОВИЧ, КОВАЛЕВ ВЯЧЕСЛАВ ЛЕОНИДОВИЧ
МПК / Метки
МПК: G05B 19/418
Метки: программного, управле-ния, установки, электроннолучевой
Опубликовано: 23.06.1981
Код ссылки
<a href="https://patents.su/4-840810-ustrojjstvo-dlya-programmnogo-upravle-niya-ehlektronnoluchevojj-ustanovki.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управле-ния электроннолучевой установки</a>
Устройство для регистрации времени входа и выхода

Номер патента: 875415
Опубликовано: 23.10.1981
Авторы: Баженов, Графенбергер, Матвеев, Чех, Шкроб
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...7 памяти, способный хранить его (один) массив информации. Он хранится здесь до,тех пор, пока 5 4вахтер охраны (иди устройство идентификации) не убедится в соответствиитабельному номеру лица фактически следующего через контроль. По окончанииэФой операции сотрудник охраны (илиустройство идентификадии) замыкаетвторой ключ 8, вследствие чего массивинформации поступает в блок 9 выдачиинформации, и записывается на магнитную ленту. Одновременно на вход блока 11 индикации поступает через второй ключ 8 сигнал переключения, по исполнении которого система возвращается в исходное состояние. Процесс по- .вторяется, как только очередной сотрудник увидит зеленый сигнал блокаиндикацииЧастота следования сотрудников определяется временем их...
Устройство для регистрации времени входа и выхода

Номер патента: 898478
Опубликовано: 15.01.1982
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...17 отображения, блок 18 печати.Блок б управления, блок 8 регистрации, программный блок 12 реализованы на базе микропроцессоров иу 5 перепрограммируемых постоянных запоминающих устройств.При наличии заявки с любого блока 2 считывания, коммутатор 3 последовательно опрашивает и отыскивает блок считывания, в котором содержится код жетона-пропуска. Датчики 1 направления дополняют этот код кодом направления движения (приход на предприятие или уход иэ предприятия). Полученный код через коммута/ тор 3 поступает в приемный регистр 4 и через него в блок 5 контроля кода. Код жетона-пропуска определяет адреса ячеек программного блока 12 и блока 8 регистрации. Если код жетона-пропуска считан верно, то блок б управления считывает код...
Развертывающий усилитель с гальваническим разделением цепей входа и выхода

Номер патента: 1231518
Опубликовано: 15.05.1986
Авторы: Дегтярев, Поваров, Цытович
МПК: G06G 7/12
Метки: входа, выхода, гальваническим, развертывающий, разделением, усилитель, цепей
...(Фиг. 38), под действием которых происходит срабатывание дополнительного релейного элемента 4, выходной сигнал которого повторяет форму импульсов на вьмоде релейного элемента 3 (Фиг. 3 а,Ь ),11 22 . 1Т,= -х(Е),(5) Делитель 8 частоты преобразуетвыходной сигнал релейного элемента 3(фиг. 4 а Е ) в импульсы типа "меандр" со средним нулевым значением(фиг. 4 Ь,2 ), В блоке 6 питания выходной сигнал делителя 8 частоть 1 разделяется по постоянному току (фиг.4 ,а,), выпрямляется (фиг. 4 к,) ифильтруется (фиг. 4 и,к ). Таким образом, Формируется напряжение питания дополнительного релейного элемента 4, а гальваническое разделениевхода и выхода устройства производигся с помощью первого дифференцирующего трансФорматора 5 и трансформатора блока 6...
Устройство для регистрации входа и выхода персонала

Номер патента: 1381561
Опубликовано: 15.03.1988
Авторы: Бирюков, Мосягин, Староверов, Терещенко
МПК: G07C 9/00
Метки: входа, выхода, персонала, регистрации
...блоки 9 - 12 управляющей цепи направляет в соответствующий блок 2 считывания сигнал запроса информации. По этому сигналу блок считывания информации выдает информационный код, который по информационной цепи поступает в блок 8. Последний через управляющую цепь посылает в блок считывания информации сигнал окончания обслуживания.Информация о текущем времени или времени прихода (ухода) трудящегося формируется в вычислительной машине программным путем с использованием стандартных устройств и программ управляющих вычислительных машин для организации текущего времени.В качестве управляющей вычислительной машины может быть использована любая серийно изготавливаемая управляющая машина, связанная с блоком 8 опроса.Отметка времени вырабатывается...
Цифровой преобразователь координат

Номер патента: 614439
Опубликовано: 05.07.1978
Авторы: Вигдорчик, Кривего, Московкин, Торгоненко, Шуленин
МПК: G06F 15/34
...элемента И блока 11,Рассмотрим работу цифрового преоб)азователя координат за время одной итерации на примере суммирования чисел на сумматоре 1, так как процесс суммирования чисел, запись результата суммирования во входную группу регистра и сдвиг информации в нем происходят и в блоках 10 и 11 идентично. Пусть в регистре 7 в ффа - итерации записалось число при пщ 16 и К"-4 вида 1001 1101 1011 0110, которое распределяется в четных групйах регистра как число 1101 0110, а в нечетных группах - как число 1001 0110, Информация на сумматор поступает младшими разрядами. Изменение информации по циклам в 1 Ф +1)-й итерации приведено в табл. 1Каждый цикл представляет собой половин периода задающего генератора 9.614439 По сигналу блока управления 8...
Предыдущий патент: Многоканальное устройство для программногоуправления электрохимическими процессамимаркирования
Следующий патент: Устройство для программногоуправления
Случайный патент: Плотина из местных материаловеснсоюзнаяштш1и"1еиблиот;: л: а i