Квантовый компонентный магнито-metp
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 819778
Автор: Любимов




Текст
ОП ИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОУСКОМУ Св ЕТВЛЬСТВУСфюз Советских Сецмаинстмческмх Реснублнк(22) Заявлено 160279 (21) 2726328/18-25 (51)М. Кл. с присоединением заявки М С 01 Ч 3/14 Гвсуяврствеввый квинтет СССР яо ае 4 вм язвбретений я еткрытяй(71) Заявмтел ециальное конструкторское приборостроения АН ССС ро физиче 54) КВАНТОВЫЙ КОМПОНЕНТНЫЙ МАГНИТОМЕТ Изобретение относится к области геофизики, а именно к классу приборов, используемых для измерения составляю-. щих вектора напряженности магнитного поля Земли в движении.Известно устройство содержащее гировертикаль и квантовый магнитометр, жестко закрепленный в буксируемой гондоле и установленный в центре системы иэ жестко закрепленных на объекте трех взаимно перпендикулярных пар колец Гельмгольца, систему автокомпенсации, датчики которой установлены на гировертикали и связаны с колечными системами Ц . 15Определение компонент производится счетно-решающим устройством, в которое вводятся значения измеренных компонент магнитного поля и поправки на углы наклона, постоянно измеряемые 20 датчиками системы автокомпенсации, установленными в гондоле.Недостатком такой схемы построения являетСя необходимость размещения дополнительной аппаратуры в буксируемой гондоле,что ведет к увеличению сигнальных жил кабель-буксира и снижению точности измерений магнитного поля за счет собственной переменной намагниченности элементов гироприбо ров, использования сложного в эксплуатации счетно-решающего устройства,Известен также квантовый компонентный магнитометр, содержащий квантовый магниточувствительный датчик с блоком формирования сигнала, колечнук систему токовой компенсации с целью питания, систему автоматической компенсации вертикальной составляющей вектора магнитного поля Земли, аистему компенсации колебаний колечной системы, измерительное устройство и регистратор. Колечная система токовой компенсации выполнена в виде полой маятниковой усеченной сферы с проточками для колец, стабилизированной в двойном карданном подвесе. В центре коленчатой системы установлен магниточувствительный датчик, ориентация которого устанавливается с помощью систеьаы ориентации датчика 2 .Недостатком такого компонентного магнитометра является то, что его характеристики по точности измерения компонент магнитного поля Земли, а также его эксплуатационные качества, определяются степенью стабилизации токовых колец колечной системы относительно истинной вертикали, то есть конструктивной схемой стабилизированной платформы., Так какеприбор находится на движущейся платформе в буксируемой гондоле, :то вследствие влияния переменных ускорений на точку подвеса маятниковая колечная система имеет колебания относительно точки подвеса. Амплитуда этих колебаний зависит от параметров буксиров-, ки(скорости хода судна, длина кабель- буксира, величины и найравления волне ния, величины заглубления. гондолы и ее стабилизации) и имеет. переменный характер. Необходимая точность в измерении компонента в этом случае достигается за счет автоматического осреднения результатов измерения за время, значительно превышающее соб ственный период колебаний колечной системя, что приводит. к уменьщению частоты измерений.Целью изобретения является повышение точности измерения за счет ис- ;щ ключения влияния условий буксировки на результаты,измерения.Ноставленная цель достигается тем, что в квантовый компонентный магнитометр, содержащий квантовый магниточувствительный датчик с блоком Формирования сигнала, колечную систему токовой компенсации с цепью питания, систему автоматической компенсации вертикальной составляющей вектора магнитного поля Земли, систему ком-. пенсации колебаний колечной системы, измерительное устройство и регистратор, дополнительно введена система компенсации колебаний колечной системы относительно вертикали с эле ментом регулировки тока, а цепь питания колечной системы выполнена по мостовой схеме, в одно иэ плеч которой последовательно с колечной системой включен элемент регулировки тока щ системы компенсации колебаний колечной системы относительно вертикали, причем вход этой системы компенсации подключен к выходу формирователя сигнала н входу измерительного устройст-ва, а выход - к входу системы авто- компенсации вертикальной составляющей вектора магнитного поля Зеюи, элемент регулировки тока которой включен в другое плечо моста.На фиг. 1 изображена блок-схема фф квантового компонента магнитометра, на фиг. 2 представлена схема построе- . ния квантового компонентного магнитометра.В немагнитной гондоле 1 (фиг. 1)И буксируемой за кораблем 2, расположен квантовый магниточувствительный датчик 3 с колечной системой токовой компенсации 4. В носовой части гондолы 1 расположен блок формирования 60 сигнала 5. Буксируемая гондола.1 сое. динена с аппаратуройрасположенной на борту судна-буксировщика 2, при помощи немагнитного кабеля-буксира б. Бортовая аппаратура включает в 65 себя измерительное устройство 7, регистратор 8, систему компенсации ко- лебаний колечной системы токовой компенсации относительно вертикали 9 и систему автокомпенсации вертикальной составляющей вектора магнитного поля Земли 10.Развернутая функциональная схема квантового компонентного магнитометра (фиг. 2), основой которого является мост постоянного тока, в одно из плеч которого последовательно с колечной системой токовой компенсации 4 включен регулирующий элемент, 11 системы компенсации колебаний колечной системы токовой компенсации относительно вертикали 9, .а.в другое плечо - регулирующий элемент 12 системы автокомпенсации вертикальной составляющей магнитного поля Земли 10.Система компенсации колебаний колечной системы токовой компенсации относительно вертикали 9 (фиг. 2) включает в себя частотный детектор 13, вход которого соединен с выходомформирователя сигнала 5 и входом измерительного устройства 7, а выход - с входом Фильтра низкой частоты 14, синхронный детектор 15, соединенный ио входам с фильтром низкой частоты 14, модулятором 16 н генератором им-. пульсов 17, а выход которого соединен со входом усилителя постоянного тока 18, к .одному выходу которого подключен регулирующий элемент 11, входящий в плечо моста последовательно с колечной системой токовой компенсации 4 и эталонным сопротивлением 19, в другой выход этого усилите- ля соединен со входом порогового устройства 20, входящего в состав системы автокомпенсацни вертикальнойсоставляющей магйитного поля Земли 10включающий в себя реверсивный счетчик 21,.один вход которого подключен к выходу порогового устройства 20, а другой вход соединен с блоком ручной начальной установки тока компенсации 22, а выход. подключен ко входу преобразователя код-ток 12, входящего в качестве регулирующего элемента вместе с эталонным сопротивлением23 в другое плечо моста, питание которого осуществляется от высокостабильного источника питания 24, при этом в диагональ моста включен модулятор 16, соединенный по входу со вторым выходом генератора импуль. - СОВ 11Работа прибора осуществляется следующим образом.Начальная компенсация вертикальной составляющей магнитного поля Земли по минимуму показаний измерительного устройства 7 осуществляетсяблоком ручной начальной установки тока компенсации 22 при помощи реверсивного счетчика 21, выходы которогосоединены с преобразователем код-ток 12, что обеспечивает протекание через эталонное сопротивление 23 тока от высокостабильного источника питания 24 и создание на этом сопротивлинии падения напряжения, соответствующего скомпенсированному.При наличии разности потенциалов в диагональ моста (на эталонных сопротивлениях 19 и 23) включается цепь обратной связи, состоящая из модулятора 16, синхронного детектора 15 и регулирующего элемента 11, включенного последовательно в цепь питания колечной системы токовой компенсации 4. Импульсы от генератора 17 поступают одновременно на модулятор 16 и синхронный детектор 15, на выходе которого появляется напряжение, пропорциональное величине рассогласования в диагонали моста. Это напряжение усиливается усилителем постоянного тока 18 и поступает на регулирующий элемент 11, имеющий квазилинейную характеристику регулирования, который компенсирует величину рассогласования, т.е. уменьшает или увеличивает протекание тока через плечо моста, в которое включена колечная система токовой компенсации 4. При наличии разности потенциала в диагонали моста, равной нулю, система будет полностью скомпенсированной. После этого система переводится в режим авто- компенсации, для чего блок ручной начальной установки тока компенсации 22 отключается, а включается цепь обратной связи с усилителем постоянного тока 18 и пороговым устройством 20, обеспечивающая автоматическое переключение реверсивного счетчика 21 при выходе из диапазона регулирования (при увеличении или уменьшении велйчины измеряемого поля), формируемого пороговым устройством 20. ствия с выхода фильтра поступает на синхронный детектор 15 и на усилительпостоянного тока 18, который воздействуя на регулирующий элемент 11 компенсирует колебания колечной системы токовой компенсации 4 относительно, вертикали путем регулирования тока, протекающего через эту колечную систему, по закону колебания системы при условии поддержания оптимальной компенсации измеряемом диапазоне полей системой автокомпенсации 10.Таким образом осуществляется двойная автокомпенсация тока в колечной системе 4.Лабораторные испытания макета пока зали полную работоспособность прибора. Система компенсации колебаний колечной системы уверенно компенсирует колебания колечной системы до частот порядка 18-20 Гц. 5 О 15формула изобретения При буксировке колечная система токовой компенсации 4 испытывает колебание относительно истинной вертикали. Сигнал, зарегистрированный магниточувствительным датчиком 3 на выходе формирователя сигнала 5, будет промодулирован по частоте с периодом, равным периоду колебаний колечной системы 4. Для осуществления компенсации колебаний колечной системы 4 и выделения воздействия на регулирующий. элемент 11, сигнал с выхода формирователя сигнала 5 поступает на вход частотного детектора 13 и фильтра низкой частоты 14, на выходе которых получается сигнал низкочастотной огибающей в полосе от 2 до 0,05 Гц. Переменный сигнал регулирующего воздей 25 Квантбвый компонентный магнитометр,содержащий квантовый магниточувствительный датчик с блоком формированиясигнала, колечную систему токовойкомпенсации с.цепью питания, систему.автоматической компенсации вертикальнсй составляющей вектора магнитного поля Земли, систему компейсацйиколебаний колечной снстемы, измерительное устройство и регистратор.,о т л и ч а ю щ и й с я тем, что,с целью повышения точности измеренийза счет исключения влияния условийбуксировки на результаты измерения,в него дополнительно введена системакомпенсации колебаний колечной сис 40 темы относительно вертикали с элементом регулировки тока, а цепь питаниякалечной системы выполнена по мостовой схеме, в одно из плеч которойпоследовательно с колечной системойвключен элемент регулировки тока,системы компенсации колебаний колечной системы относительно вертикали,причем вход этой системы компенсации подключен к выходу формирователя сигнала и входу измерительногоустройства, а выход - к входу системы автокомпенсации вертикальной составляющей вектора магнитного поляЗемли, элемент регулировки тока которой включен в другое плечо моста.5Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРР 278140, кл. С 01 Ч 3/16, 1968.2. Авторское свидетельство СССРф 0 М 382989, кл. С 01 Ч 3/14, 1971 (прототип).819778 Составитель Л. Василевскаяедактор Т. Глазова Техред Т.Маточка Корректор В. Синицкая каз 1385/2 лиал ППП "Патент", г. Ужгород, ул. Проектная, 4 Тираж 7 ВНИИПИ Госу по делам 3035, МоскваПо рственного комит эобретений и отк Ж, Раушская н исноеа СССРтийд. 4/
СмотретьЗаявка
2726328, 16.02.1979
СПЕЦИАЛЬНОЕ КОНСТРУКТОРСКОЕ БЮРОФИЗИЧЕСКОГО ПРИБОРОСТРОЕНИЯ AHCCCP
ЛЮБИМОВ ВЛАДИМИР ВАЛЕРЬЕВИЧ
МПК / Метки
МПК: G01V 3/14
Метки: квантовый, компонентный, магнито-metp
Опубликовано: 07.04.1981
Код ссылки
<a href="https://patents.su/4-819778-kvantovyjj-komponentnyjj-magnito-metp.html" target="_blank" rel="follow" title="База патентов СССР">Квантовый компонентный магнито-metp</a>
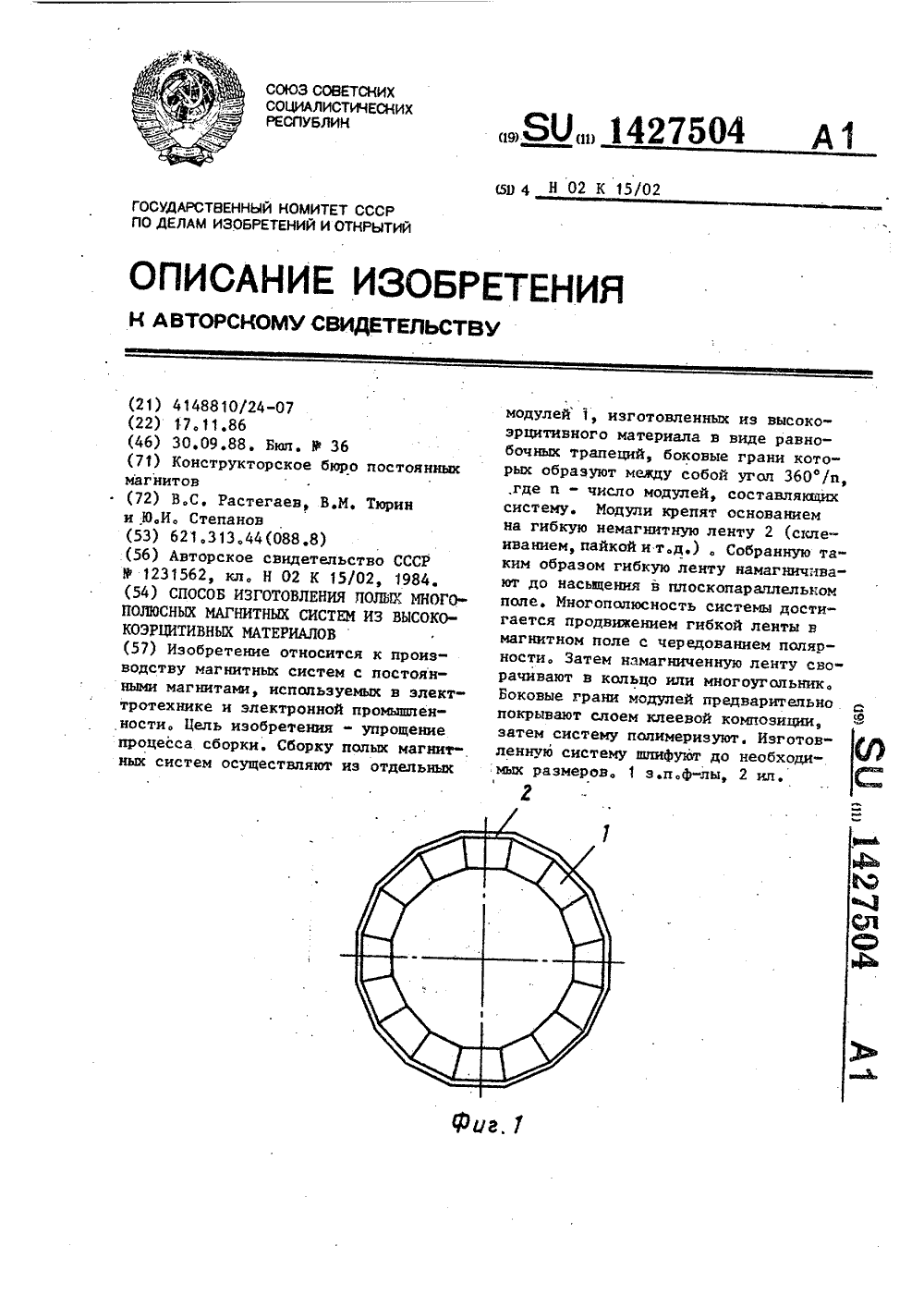
Способ изготовления полых многополюсных магнитных систем из высококоэрцитивных материалов
Номер патента: 1427504
Опубликовано: 30.09.1988
Авторы: Растегаев, Степанов, Тюрин
МПК: H02K 15/02
Метки: высококоэрцитивных, магнитных, многополюсных, полых, систем
...д. 4/5 каз 4861 водственно-полиграфическое предприятие, г, Ужгоро 4, ул, Проектная,Изобретение относится к производству магнитных систем с постояннымимагнитами, используемых в электротехнике и электронной промышпенности.Цель изобретения - упрощение процесса изготовлении и расширение технологических возможностей путем получения систем с радиальной текстурой,На фиг.1 изображена полая многополюсная магнитная система; на фиг.2 развертка магнитной системы,Сборку полых магнитных системосуществляют из отдельных модулей 1,изготовленных из высококоэрцитивного 15материала в форме равнобочных трапеций, боковые грани которых образуютмежцу собой угол 360 /и, где и -число модулей, составляющих систему.Модули крепят основанием на гибкую 20немагнитную...
Емкостная система самовозбуждения колебаний резонаторов частотных датчиков

Номер патента: 857759
Опубликовано: 23.08.1981
Авторы: Горенштейн, Корольков, Кравцов
МПК: G01L 11/00, G01L 7/08
Метки: датчиков, емкостная, колебаний, резонаторов, самовозбуждения, частотных
...усилитель, входы и выход которого подключены через конденсаторы к электродам, электроды одной из систем возбуждения-регистрации колебаний подключены к одному истдчнщсу пдстоянногд смещения, р, электроды другой - разделены на две симметричные группы и подключены к двухполярному источнику постоянно. го смещения, средняя точка которого заземлена.На чертеже показана предлагаемая емкостная схема.Емкостная система самовозбуждения содержит две круглые мембраны Д и 2, электрически соединенные с корпусом преобразователя, который. в свою очередь соединен с общим заземлением 3 электрической схемы. Через высокоомные резисторы 4 и 5 две симметричные группы электродов 6,7 и 8,9 систем возбуждения-регистрации колебаний подключены к...
Агрегат для выемки угля при системе разработки короткими забоями полого-падающих пластов средней мощности

Номер патента: 113745
Опубликовано: 01.01.1958
Автор: Гуменник
МПК: E21C 25/00, E21C 25/18, E21D 19/00, E21D 19/04
Метки: агрегат, выемки, забоями, короткими, мощности, пластов, полого-падающих, разработки, системе, средней, угля
...в виде двух трехлугчевых кснструкцяЙ, установленных на общей подвижной раме 2, совершающей возвраггно-поступательнь:е дв.женяя вдоль забоя пс направляощнм 3 при помощи механизма 4 передвкения рабочего органа, редуктора 5 рабочего органа и двигателя 6 рабочего орина, двух гусенгичных тележек 7 и о"новвой рамы 8. Каждый луч рабочего органа оснащен двумя периферийньми дисками 9 для разрущения угля и ковшом 10 для погрузки угля на скребковый конвейер 11.Передняя сторона конвейера, обращенная к груди забоя, оснащена козырьком 12, идущим по почве для обеспечения зачистки угля с почвы. Разгрузочная сторона конвейера приподнята над почвой,для обеспечения погрузки угля на транспортер.Ограждающая крепь 13 состоит из отдельных секций, связанных с...
Способ определения ориентации оси легкого намагничивания и поля анизотропии магнитных пленок

Номер патента: 1023265
Опубликовано: 15.06.1983
МПК: G01R 33/12
Метки: анизотропии, легкого, магнитных, намагничивания, ориентации, оси, пленок, поля
...плоскости пленки,пленку устаавливают таким образом,цтобы. ось ее вращения совпадала сномалью к поверхности пленки, освещают пленку поляризованным светом ис помощью анализатора и микроскопанаблюдают зарождение доменной структуры, вращают пленку вокруг оси,совпадающей с нормалью к плоскостипленки, подбирают ориентацию и напряженность магнитного поля такимобразом, цтобы в момент зарождениядоменная структура имела полосовойхарактер, снимают зависимости продольной и поперечной (относительнооси вращения пленки) компонент напряженности магнитного поля, соответствующих моменту образования домен"ной структуры от угла поворота плен"гки, пред ста вляют полу ченную з ависимость в виде рядов Фурье и опреде,ляют константы и ориентацию...
Магнитная система плазменной ловушки со стеллараторной конфигурацией магнитного поля

Номер патента: 1562957
Опубликовано: 07.05.1990
Авторы: Георгиевский, Мартынов, Рудаков, Сергеев, Ходячих
МПК: G21B 1/00
Метки: конфигурацией, ловушки, магнитная, магнитного, плазменной, поля, стеллараторной
...СИСТЕМА ПЛАЗМЕННОЙЛОВУШКИ СО СТЕЛЛАРАТОРНОЙ КОНФИГУРЦИЕЙ МАГНИТНОГО ПОЛЯ ение относится к тер ергетической техноло к магнитным системам раторного типа, и мок ьзовано при создании реакторов,обретениятехнологи домкраты 3, цапали 4, е изображен тоТоковые кольца 2 ль круговой оси токолец 2 выбран мень са тора. Кольца 2 4 и домкратами 3. оляют варьировать плоскости колец отнокольца и компенсируми соответственнои 1(фиг.2), которые создают.магнитные поверхности токового шнураПри регулировке соотношения междутоками 1 в и 1 подбирается поперечное поле В, на круговой оси такойвеличины, чтобы при данном угле наклона колец у параметры магнитных поверхностей давали в комбинации максимапьное значение величиныЕй (а)/А, где а- средний...
Предыдущий патент: Способ геофизической разведки
Следующий патент: Устройство для аэроэлектроразведки
Случайный патент: Способ контроля магнитных лент