Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
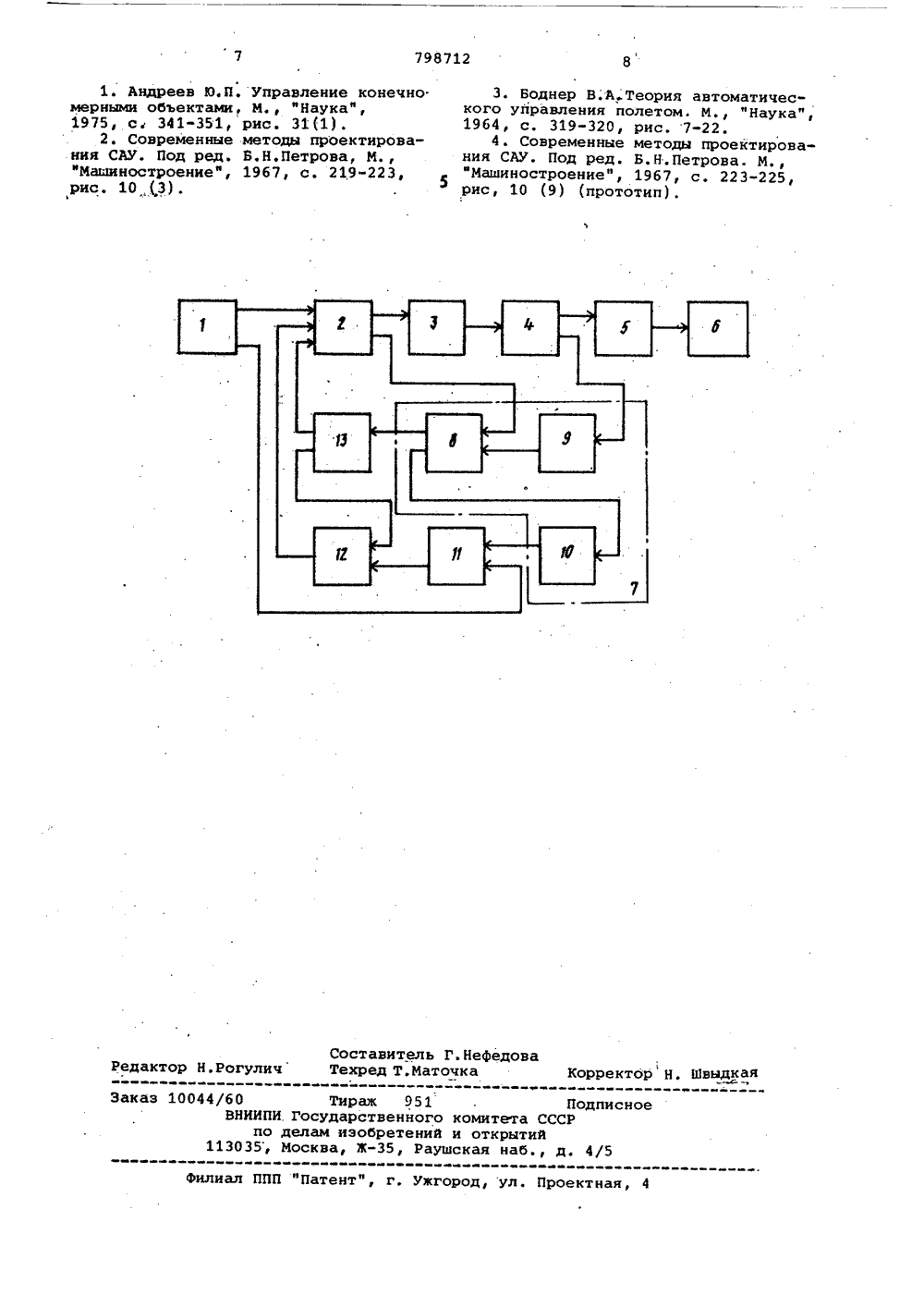
ОБ ЙСфюз Сфеетскнк Сфцнаинстнчесмнк Ресиубинк(22) Заявлено 251278 (21) 2700948/18-24 (51) М. Кл. с присоединением зеваки Йо С 05 В 17/02 Государственный комитет СССР ио дедам изобретений и открытий(088.8) ЬДата опубликования описания 230181Ленинградский ордена Ленина электротехнический институт им. В. И. Ульянова (Ленина)(54) СИСТЕМА УПРАВЛЕНИЯ 1Изобретение относйтся к системам автоматического управления, в частности к следящим системам, объектом которых является исполнительный дви гатель с нагрузкой на валу, и может 5 быть использовано для управления элек. тромеханическим объектом, в том числе с упругими связями и зазорами, когда выходные и промежуточные координаты нагрузки не все доступны измерению 10 с помощью датчиков, например в станкостроении в системах управления механизмами металлорежущих станков,Известны следящие систеьн, содержащие последовательно соединенные 15 измеритель рассогласования, регулятор и объект. регулирования, вход и выход которого соединены с соответствующими входами устройства для измерения текущих динамических ха" 20 рактеристик нестационарного объекта(идентиФикатором), выход которого соединен со вторым входом регулятоИ и Г 21.звестны также следящие систеьи, 25содержащие последовательно соединенные задатчик, измеритель рассогласо" вания, регулятор и объект, выход которого соединен с первым входом ,сумматора, второй вход которого чераз 30 2в эталонную модель соединен с выходом эадатчика, а выход через устройство управления с бесконечно большим коэффициентом усиления и ограничением соединен со вторым входом регулятора. В такой системе сравнивают реальные выходные координаты объекта с желаемыми, а по их разности Формируется дополнительный сигнал управления )31.Наиболее близкой по технической сущности к предлагаемому техническому решению является самонастраивающая система, содержащая последовательно соединенные блок задакщих сигналов, рагуляятО, усилитель мощности и исполнительный двигатель, кинематически связанный с объектом упраЬления, и последовательно соединенные блок оценки состояний объекта, измеритель ошибки и нелинейный уеилитель,вход которого соединен со вторым входом регулятора, второй вход блока оценки состоянийобъекта соединен со вторым выходом регулятора, а второй вход измерителя ошибки - со вторым выходом блока задающих сигналов 4).Недостатком известной систеьи является то, что при работе с объек" том управления, соединенным с исполнительным двигателем с помощью механической передачи с упругой связью изазором, система становится неработоспособной.Цель изобретения - расширение области применения системы для управления объектом, у которого выход и 5промежуточные координаты нагрузкинедоступны измерению, путем подавления резонансных колебаний объектауправления и расширения полосы пропускания за границу области резонансных частот,Поставленная цель достигается темчто система управления содержит блокмасштабных коэффициентов, вход кото рого соединен со вторым выходом блокаоценки состояний объекта, первый выход - с третьим входом регулятора, авторой выход - со вторым входом нелинейного усилителя.При этом организовывается два контура управления объектом управления, 20координаты нагрузки которого .недоступны измерению. Первый, внутренний, контур управления по состоянию объектаобразованным регулятором, усилителеммощности и исполнительным двигателем 25с датчиком скорости, замкнутым черезблок оценки состояния объекта и блокмасштабных коэффициентов, чем обеспечивается устойчивость и быстродействие при управлении объектом наоснове восстановления блоком оценкисостояния (и) независимых переменных объекта, где и - общий порядокдифференциальных управлений объекта.Восстановление (оценка) недоступных для непосредственного измерениякоординат объекта управления по выходному сигналу исполнительного двигателя возможно потому, что в сигналескорости двигателя содержится информация о динамических процессах в 40объекте управления, накладывающихсяв виде обратной реакции на движениевала двигателя вследствие неоднонаправленных свойств механическойпередачи. 4Второй, внешний, контур управленияпо вычислительному значению выходнойкоординаты объекта управления образуютрегуля тор, усилитель мощности, исполнительный двигатель, замкнутые Ячерез блок оценки состояния объектаизмеритель ошибки и нелинейный уситель. В контуре осуществляетсяправление с обратной связью по тойвычислительной координате объектауправления, которая в процессе управления следует своему эталонному назначению, предписываемому блокомзадающих сигналов. Таким образом,блок оценки состояния объекта наоснове информации об (и) неза- ф 0висимых переменных состояния объекта.управления формирует независимуюпеременную, пропорциональную илиравную той физической координатеобъекта, которая контролируется в про, 45 цессе управления, приобретая смыслвыходной координаты (выхода) объектауправленияБлок задающих сигналов выдает нарегулятор командный сигнал, а наизмеритель ошибки эталонный сигналвыходной координаты объекта управле,ния, вырабатываемый в нем с помощьюэталонной модели системы.Блок оценки состояний объектасостоит из датчика скорости, идентификатора, определяющего (и) независимую переменную состояния объекта,н вычислительного блока, определяющего по известным (и) переменнымсостояния выходную координату объектауправления.На чертеже приведена функциональная схема предлагаемой системы управления объектом с недоступным измерениювыходом,Схема содержит блок 1 задающегосигнала, регулятор 2, усилитель 3 мощ.ности, исполнительный двигатель 4,механическая передача 5, объект 6Управления, блок 7 оценки состоянийобъекта, идентификатор 8 состоянияобъекта, датчик 9 скорости, вычислительный блок 10, измеритель 11 ошибки, нелинейный усилитель 12 и блок13 масштабных коэффициентов.Система управления работает следующим образом.Блок задающего сигнала вырабатывает командный сигнал, который черезрегулятор 2, усилитель 3 мощности,исполнительный двигатель 4 и механическую передачу 5 передается на объектб управления, в котором возбуждаютсярезонансные колебания. Для обеспечения быстродействия и устойчивой отработки объектом управления задающегосигнала идентификатор 8 состоянияобъекта, получая сигнал от датчика9 скорости исполнительного двигателя 4, на скорость которого ввидуобратной .реакции механической передачи накладываются колебания объектауправления, вырабатывает недоступныеизмерению (2 и) независимых координат объекта управления имеющего истепеней свободы, именно: в упругихмоментов, соответствующих в упругимрезонансам, и аобобщенных скоростей. Если объект управления однорезонайсный (ймеет одну степень свободы), то восстанавливается одинупругий момент.Выход идентификатора 8 состоянияподается в блок 13 масштабных коэффициентов, формирующего линейнуюкомбинацию с заданными весовымикоэффициентами сигналов, вырабаты-.ваемых идентификатором 8 состоянияобъекта. Сформированный блоком 13масштабных коэффициентов сигнал через регулятор 2, усилителя мощнос"ти 3, исполнительный двигатель 4и механическую передачу управляетобъектом 6 управления принудительным образом, подавляя резонансынагрузки с помощью исполнительногодвигателя 4, При этом достигаетсяполоса пропускания управления механическим объектом, перекрывающая 5область его резонансных частот. Одновременно вычислительный блок .10, получая сигнал от идентификатора 8состояния объекта, вычисляет выходнуюкоординату объекта управления, а10именно скорость той массы, котораясвязана с рабочим органом объектауправления и движение которой контролируется при управлении в соответствии с задающим сигналом. Затем выход вычислительного блока 10 сравнивается в измерителе 11 ошибки с задающим сигналом блока 1, и полученныйсигнал рассогласования поступает внелинейный усилитель 12, представляющий собой безынерционный усилитель Яс большим усилием и ограничением,причем вблизи нулевой части характеристики усилителя имеется участок сусилением на порядок выше остальнойчасти характеристики. Сформированный 2нелинейным усилителем 12 сигнал управления поступает на вход регулятора2, образуя контур управления объектомпо его вычислительной выходной координате. Пропорционально-интегрирующий регулятор 2 обеспечивает необходимое усилие контура для достиженияпредельного с учетом ограниченийусилителя 3 мощности и исполнительного двигателя 4 быстродействия приуправлении вычислительным выходомобъекта управления, а также придаетему астатические свойства,Одновременно с этим, вырабатывае. мая измерителем 11 ош:бки ошибкамежду вычислительной выходной координатой вычислительного блока 10 изадающим сигналом блока 1 поступаетчерез нелинейный усилитель 12 ирегулятор 2 на второй вход идентификатора 8 состояния объекта и через 45него на вход вычислительного блока10, осуществляя корректированиеоценок этих блоков при изменениипараметров объекта управления в процессе управления и влияния нелиней- урностей как самого объекта управления(зазоров), так и характеристик усилителя 3 мощности, исполнительногодвигателя 4 н механической передачи 5. Нелинейный усилитель 12 позволяет обеспечить выбор режимов работыпредлагаемой системы при устранениинарушающего нормальную работу действия нелинейностей или переменностипараметров, а именно: если превалирует влияние нелинейных свойств, то еОблагодаря участку с повышенным усилием в нелинейном усилителе 12 возбуждается скользящий режим, создающий линеаризацию нейлинейностей(например, заэороз в объекте б управ-И ления и механической передаче 5 и зоны нечувствительности усилителя 3 мощности), Если же преобладает действие изменения параметров объекта управления, то сформированный нелинейным усилителем 12 сигнал управления по своему Функционированию эквивалентен сигнальной адаптации, достигая при этом значений ограничения.Таким образом, вычислительный блок 10 вырабатывает вместе с идентификатором 8 состояния объекта точ-.ную в прантмческом смысле оценку выхохной коордюваты, а вслед за ней также точные оценки промежуточных координат, Выборок коэффициентов в блоке 13 иааатабных коэффмциентов обеспечываетсж устойчивость динамических процессов в системе с иногорезонаыснни обьектом, а также быстродействие к предписанное блоком 1 задакаФх сигналов качество переходных процессов по выходной координате объекта б увравленмя вплоть до ограииченай ресурсов усилителя 3 мощ" ности н исполмнтельыого двигателя 4.Предлагаемая система обеспечивает устойчивость управления объектом с одним и более механическими резонансаии, работающего в условиях изменяющихся,параметров и проявления нелинейных свойств и когда его выходная.и.промежуточные координаты недоступны измеренИю. При этом достигается предельное по энергетйческим возможностям бйстродействие с полосой йропускания, перекрывающей область резонансных частот.Формула изобретенияСистема управления, содержащаяпоследовательно соединенные блок задающих сигналов, регулятор, усилительмощности и исполнительный двигатель,киыеиатически связанный с объектомуправления, и последовательно соедиыеиные блок оценки состояний объекта, изиерытель ошибки и нелинейныйусилитель, вход которого соединен совторым входои регулятора, второй входблока оценки состояний объекта соединен со вторыи выходом регулятора,а второй вход измерителя ошибки " совторым выходом блока задающих сигналов, отличающаяся тем,что, с целью расширения области прииенненик скствию, она содержит блокмасштабных коэффициентов, вход которого соедннен со вторым выходом блокаоценки состояний объекта, первыйвыход - с третьим входом регулятора,а второй выход - со вторым входом нелинейного усилителя.Источники информации,принятые во внимание при экспертизе8 798712 Составитель Г.НефедоваРедактор Н.Рогулич Техред Т.Маточка Корректор Н.в Шш втшщв ивввтв евштт ав вввтс вв ввт вв ая 10044/60 Тираж 951 ВНИИПИ Государственного комитета по делам изобретений и открыти 113035, Москва, Ж, Раушская наб. Филиал ППП "Патентф, г. Ужгород, ул. Проектная, Зака 1. Андреев Ю.О мерными объектами 1975, с 341-351,2. Современные ния САУ. Под ред. фМашиностроение", рис. 10 (.3).. Управление конечно.М., "Наукаф,рис. 31(1).методы проектироваБ.Н.Петрова, М.,1967, с. 219-223,3. Боднер В.А.Теория автоматического уйравления полетом. М., "Наука", 1964, с. 319-320, рис. 7-224. Современные методы проектирования САУ. Под ред. Б.Н.Петрова. М., "Машиностроение", 1967, с, 223-225, рис, 10 (9) (прототип). ПодписноСССРйд. 4/5
СмотретьЗаявка
2700948, 25.12.1978
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ЭЛЕКТРОТЕХНИЧЕС-КИЙ ИНСТИТУТ ИМ. B. И. УЛЬЯНОВА
БОРЦОВ ЮРИЙ АНАТОЛЬЕВИЧ, ПОЛЯХОВ НИКОЛАЙ ДМИТРИЕВИЧ, ПРИХОДЬКО ИРИНА АРКАДЬЕВНА, ПУТОВ ВИКТОР ВЛАДИМИРОВИЧ
МПК / Метки
МПК: G05B 17/02
Метки:
Опубликовано: 23.01.1981
Код ссылки
<a href="https://patents.su/4-798712-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Ультразвуковое устройство для определения свойств движущейся среды

Номер патента: 1472815
Опубликовано: 15.04.1989
Авторы: Даубарис, Дякснис, Рагаускас
МПК: G01N 29/00
Метки: движущейся, свойств, среды, ультразвуковое
...среде;ор ч в допустимая погрешность измерения скорости движениясреды. менты. времени Ее ,Е и Ее(Фиг.2),Г ф) ъгде;, - моменты времени приема з Ондирующих сигналов , излуче нных в направлении вектора скорости Чь фИ 1- то же, в противоположном направлении. Па моментам времени излучения и моментам времени приемаЕ И) Г (-) ), ) С; ) зондирующих импульсов измеритель 8 временных интервалов определнет ин цифровые еначеннн Ет,), Ет",), Ет", .Первый сумматор 10 определяет значение интервала времени согласно выражениюИ (3)1 1+ ) ра второй сумматор 11 - значение интервала времени согласно выражению(М Иблоке 19 памяти. Их значения установлены в соответствии с постановкой измерительной задачи, например, по выражениям:Адержащее четыре...
Устройство для диагностики технического состояния объекта с помощью акустической эмиссии

Номер патента: 951135
Опубликовано: 15.08.1982
Автор: Однопозов
МПК: G01N 29/04
Метки: акустической, диагностики, объекта, помощью, состояния, технического, эмиссии
...цифровой форме поступают на вход сумматора 5 и счетчика14 эмиссионно-активных циклов нагру- жения.С Датчика 11 циклов нагружения . 60 сигналы поступают на счетчик 12 циклов, который периодически выдает на первом выходе импульс интервала. накопления, кратного периоду циклического нагружения, а на втором - б 5 цифровой код номера текущего цикла нагружения в данном интервале,В течение интервала накоплениясчетчик 14 активных циклов производит подсчет поступающих со счетчика 12 циклов импульсов, которые соответствуют циклам нагружения, длякоторых выходные отсчеты измерителя4 параметров больше заданного в счетчике 14 активных циклов значения,При этом с первого выхода счетчика14 активных циклов на первый входФиксатора 13 положения циклов,...
Устройство для определения когерентного спектра мощности выходного сигнала объекта

Номер патента: 1756830
Опубликовано: 23.08.1992
Автор: Портной
МПК: G01R 23/16
Метки: выходного, когерентного, мощности, объекта, сигнала, спектра
...усиления по каждомувходу второго сумматора 6 равны единице, На входе фильтра 11 действует сигнал,где Р - оператор преобразования Лапласа.Это можно объяснйть действием на входе третьего сумматора 10 суммы (х + - у)1 Р сигналов, каждый из которых усиливается с коэффициентом 0,5 и свойством инвертирования операционного усилителя 10.Аналогично можно показать, что на входе фильтра 18 действует сигнал- р, равный На входе фильтра 21 действует сигнал х. Каждый сигнал предложенного устройства в результате узкополосной фильтрации, квадратичного детектирования осуществляет выделение спектральной составляющей мгновенной мощности сигналов (1), (2), (3), (4) или х. После усреднения в каждом из каналов получается оценка спектральной плотности,...
Устройство идентификации постоянной времени нелинейного объекта

Номер патента: 991377
Опубликовано: 23.01.1983
Авторы: Василенко, Тимошенков, Чекалин
МПК: G05B 23/02
Метки: времени, идентификации, нелинейного, объекта, постоянной
...образом.Контролируемые входной х(с) и выходной у(с) случайные сигналы в режиме нормальной эксплуатации объекта, 25 без возбуждения специальным. пробным сигналом, подаются на входы блоков 1 и. 2 формирования коэффициентов.Блок 2 формирования коэффициентовдОдс ф вырабатыЬает сигнал Ор(с) и О (с)= вблок 1 формирования коэффициентов вырабатывает сигналы Ср(с) и С(с)= -о-Ы. При определенных параметрах блоков 1 и 2 формирования коэффициентов сигна лы Ор(с) и Ср(с) практически совпадают с контролируемыми сигналами объекта х(с) и у(с) соответственно.Получейные сигналы позволяют преобразовать нелинейное дифференциаль ное уравнение, описывающее объектТ-"+у(с) =Гх(с), (3),цсгде х(с) - входной случайный сигнал;у(с) - выходной сигнал; 45Т -...
Акустико-эмиссионное устройство для контроля протяженных объектов

Номер патента: 1022049
Опубликовано: 07.06.1983
Авторы: Зацаринный, Лапкин, Ольховский, Рожков, Федотов
МПК: G01N 29/04
Метки: акустико-эмиссионное, объектов, протяженных
...выделять только центральную зону.Цель изобретения - расширение функциональной возможности устройства засчет обеспечения произвольного выбо- З 5 Ера эоны контроля.Поставленная цель достигается тем,, что акустико-эмиссионное устройстводля контроля протяженных объектовснабжено двумя блоками временной задержки, входы которых соединены с выходами пороговых схем каждого канала, а выходы - с входами схемы совпадения.На чертеже представлена блок-схема акустико"эмиссионного устройства 45для контроля протяженных объектов.Акустико-эмиссионное устройстводля контроля протяженных объектов содержит два канала, каждый из которыхсостоит из последовательно соединенных датчика 1 и 2, усилителя 3 и 4,блока 5 и 6 фильтров и пороговойсхемы 7 и 8,...
Предыдущий патент: Устройство для управления контейнернымприемником машины грубого волочения
Следующий патент: Интерактивная система управленияроботом
Случайный патент: Измеритель угла рассогласования