Преобразователь угла поворота вала в код
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
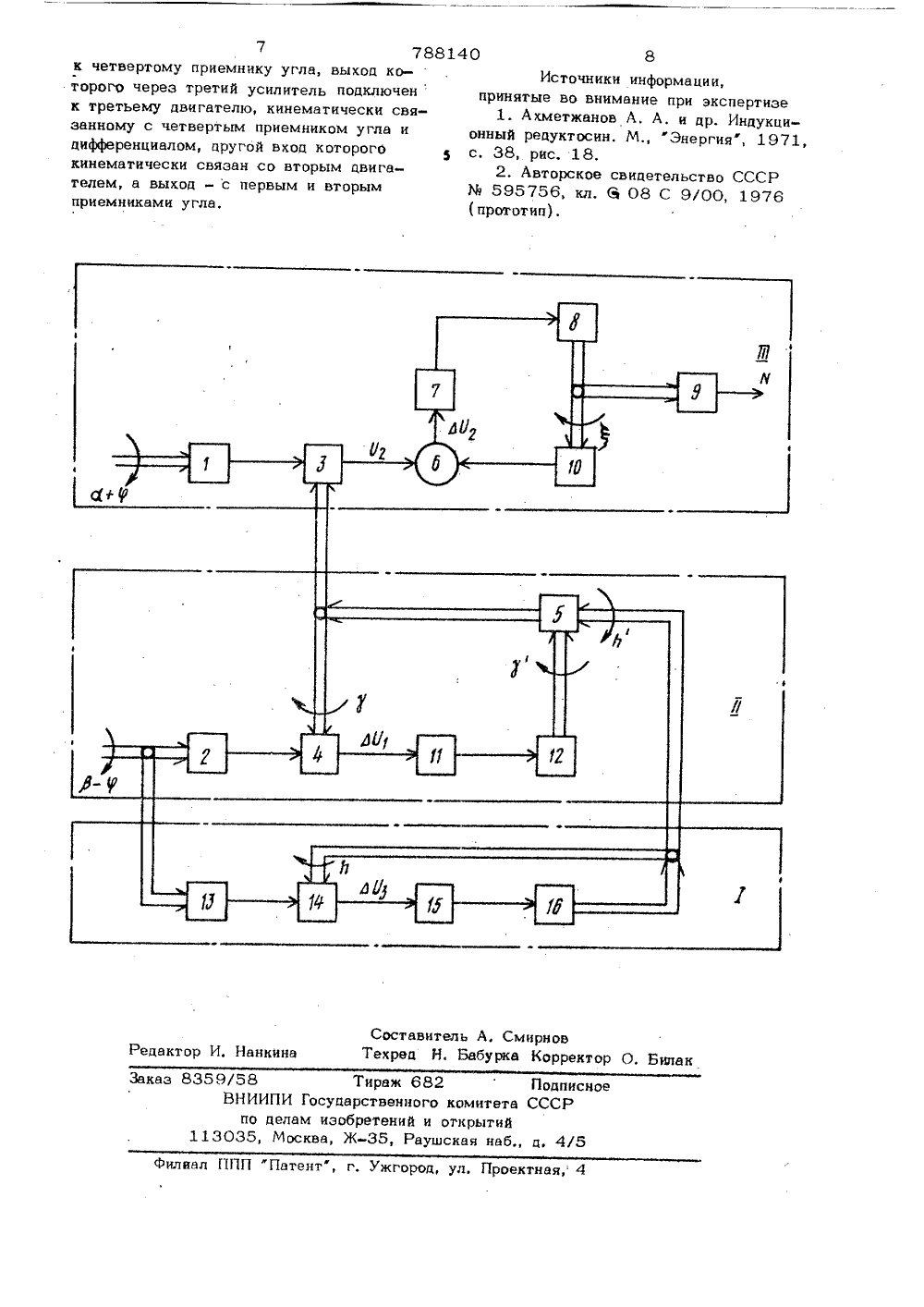
Союз СоветскихСоциалистическихРеспублик ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ 1 1788140(23)Приоритет да делам нзобретеммй и открытий( 088.8) Дата опубликования описания 18,12.80 Ю, П. Абрамов, С, Я. Барменков, Б А, Брыков,В. Н. Васильев, П, М, Гаспаров и В, Е, Янушкевич(54) ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД1Изобретение относится к автоматикеи вычислительной технике и может бытьиспользовано цля связи аналоговых источников информеции с цифровым вычислительным устройством,Известны преобразователи угла пово 5рота вала в коц, содержащие установленные на валу авухполюсный и многополюсный цатчики угла, поцключенные к соответствующим приемникам угла, выхоцы10которых подключены к селектору, выходселектора через усилитель подключен кцвигателю, кинематически связанному сприемниками угла 11 1.Недостатком таких преобразователей15является значительная цинамическая погрешность.Наиболее близким техническим решением к изобретению является преобразователь угла поворота вала в коц, содержащий установленные на валу первыйи второй многополюсные цвтчики угла,поцключенные соответственно к первомуи второму приемникам угла, валы кото 2рых кинематически связаны между собой,выход первого приемника угла подключенк одному вхоцу элемента сравнения, выхоц которого через первый усилительпоцклточен к первому цвигвтелю, кинематически связанному с отсчетным блоком и третьим приемником угла, выходкоторого подключен к цругому входу элвмента сравнения, выхоц второго приемника угла через второй усилитель подключен к второму двигателю, кинематически связанному с первым и вторымприемниками угле (2.Недостатком преобразователя является значительная цинамическая погрешность,Бель изобретения - повышение точности преобразователя,Поставленная цель достигается тем,что в преобразователь угла поворотаввлв в коц, содержащий установленныенв валу первый и второй многополюсныедатчики угла, поцключенные соответственно к первому и второму приемникам .788140 гдеЩ ею м ба Р6 Ф - - АМ) 3угла, валы которых кинематически связаны между собой, выход первого приемника угла подключен к одному входу элемента сравнения, выход которого через первый усилитель подключен к первому двигателю, кинематически связанному с отсчетным блоком и с третьим приемником угла, выход которого подключен к цругому входу элемента сравнения, выход второго приемника угла через второй усилитель подключен к второмудвигателю, введены двухполюсный цатчик угла, четвертый приемник угла, третий усилитель, третий двигатель и дифференциал, причем установленный на валу цвукполюсный датчик угла поцключен к четвертому приемнику угла, выхоц которого через третий усилитель подключен к третьему двигателю, кинематически связанному с четвертым приемником угла и дифференциалом, другой вход которого кинематически связан со вторым двигателем, а выхоц - с первым и вто рым приемниками угла. На чертеже представлена структурная схема устройства.Устройство содержит первый 1 и вто , рой 2 многопопюсные цатчики угла, подключенные к цвухполюсным приемникам 3 и 4 угла, кинематически связанным с выходом дифференциала 5. Выход приемника 3 угла соединен с одним входом блока 6 сравнения, выхоц которого подключен через усилитель 7 к исполнительному двигателю 8, на валу которого установлены отсчетный блок 9 и третий двухполюсный приемник 10 угла, выкод которого соединен с другим входом блока 6 сравнения. Выход приемника 4 через усилитель 11 подключен к двигателю 12, кинематически связанному с входом дифференциала 5. Двукполюсный цатчик 13 угла установлен на одном валу с многополюсными датчиками 1 и 2 угла, Датчик 13 угла подключен ко входу двух. полюсного приемника 14 угла, выход ко торого подключен через усилитель 15 к исполнительному двигателю 16; Вал двигателя 16 кинематически связан с приемником 14 угла и другим входом дифференциала 5. Датчик 1 угла, приемники 3 и 10, усилитель 7, двигатель 8, блок 6 сравнения образуют слецящую систему Ш, Аналогично, датчик 2, приемник 4, усилитель 1 1, цвигатель 1 2 образуют слецящую систему П, а датчик 13, приемник 14, усилитель 15 и двигатель 16 - следящую систему 1,аВыходные сигналы многополюсных датчиков 1 и 2 угла пропорциональны угловым положениям с 11 и9 с коэффициентом электрической редукции5гце 1: 5111 - Ь-: гармоническая по 2%е тдека, 1 и - ее амплитуда, Т, - период,- текущее время,Эти сигналы поступают на вкоц прием 10 ников 3 и 4 угла. Выходной сигнал приемника 14 д О, пропорциональный угловойугловой величине 1гце д.1 ч - угловая погрешность датчика1 3 и приемника 14 угла;- угловое положение приемника 14;ЦЖщ - амплитуда цинамической ошиб 1 й(ы.ки следящей системы 1, состоящей из элементов 13 -16 при отработке гармонической помехи;Д (щ)- модуль частотной перецаточной функции разомкнутой системы 1 при а Ю фТкпоступает через усилитель 15 на истолнительный двигатель 16, Поц действиемэтого сигнала исполнительный двигатель16 разворачивает ротор приемника 14,а вместе с ним через цифференциал 5роторы приемников 3 и 4 цо согласованного положения, т. е. на угол Роторы приемников 3 и 4, установленные на цене оборота, равной 360 ф, развернуты при этом на уголй-рйВыходной сигнал приемника 4, пропорциональный разности погрешность датчика 2;погрешность приемника 4;дополнительное угловое положение приемника 4;амплитуда динамическойошибки следящей системы 11,состоящей из элементов 2,4, 11, 12, при отработкединамической ошибки системы 11,модуль частотной передаточной функции разомкнутойсистемы П при (ю- Фкй у фСоставитель А. СмирновРедактор И. Нанкина Техред Н. Бабурка Корректор О. Билак аз 8359/58 Тираж 68 ВНИИПИ Государственного по делам изобретений и 113035, Москва, Ж, РаушПодписСССР комитет ткрыти я наб.,Филиал ППП Патент, г, Ужгород, ул. Проектная, 4 7 788 к четвертому приемнику угла, выход которого через третий усилитель подключен к третьему двигателю, кинематически связанному с четвертым приемником угла и дифференциалом, другой вход которого кинематически связан со вторым двигателем, а выход - с первым и вторым приемниками угла,140 8Источники информации,принятые во внимание при экспертизе1. Ахметжанов А. А, и др. Индукционный редуктосин. М., Энергия, 1971,с. 38, рис. 18,2. Авторское свидетельство СССРМ 595756, кл, 6 08 С 9/00, 1976
СмотретьЗаявка
2703148, 22.12.1978
ПРЕДПРИЯТИЕ ПЯ В-8624
АБРАМОВ ЮРИЙ ПЕТРОВИЧ, БАРМЕНКОВ СЕРГЕЙ ЯКОВЛЕВИЧ, БРЫКОВ БОРИС АЛЕКСАНДРОВИЧ, ВАСИЛЬЕВ ВАДИМ НИКОЛАЕВИЧ, ГАСПАРОВ ПЕТРОС МЕЛИКОВИЧ, ЯНУШКЕВИЧ ВЛАДИМИР ЕВГЕНЬЕВИЧ
МПК / Метки
МПК: G08C 9/00
Метки: вала, код, поворота, угла
Опубликовано: 15.12.1980
Код ссылки
<a href="https://patents.su/4-788140-preobrazovatel-ugla-povorota-vala-v-kod.html" target="_blank" rel="follow" title="База патентов СССР">Преобразователь угла поворота вала в код</a>
Многоканальное устройство для подключения абонентов к общей магистрали

Номер патента: 1083175
Опубликовано: 30.03.1984
МПК: G06F 3/04
Метки: абонентов, магистрали, многоканальное, общей, подключения
...прн отсутствии искажений кода адреса абонента в каналах 19-21 на выходе схемы 6 сравнения формируется сигнал, который, проходя через усилители-передатчики 7 и,8, выдается на шины 35 и 36. Блоки 29; получив через усилитель-приемник 22 адрес абонента, сравнивают на схеме 44 сравне. ния его с адресом, присвоенным каналу при установке и хранящимся в регистре 43. Для того, чтобы канал мог логически подключиться к магистрали, он должен опознать свой адрес и получить на свои входы сигналы выборки и дополнительной выборки. Поэтому при неопознании своего адреса блок 29 транслирует сигнал выборки с выхода элемента ИЛИ 24 через элемент И 47 на вход усилителя-передатчика 30, а сигнал дополнительной выборки с выхода элемента ИЛИ 27 через...
Многоканальное устройство для подключения абонентов к магистрали

Номер патента: 1104497
Опубликовано: 23.07.1984
Автор: Дерновский
МПК: G06F 3/04
Метки: абонентов, магистрали, многоканальное, подключения
...т.е. отключенный канал невлияет на работу других каналов. Привключенном питании контакты Р 1 и РЗразомкнуты, а контакты Р 2 - замкну ты. В этом случае сигнал выборки свхода 19 через верхнюю группу контактов переключательного элемента 30и замкнутые контакты Р 2 поступаетна вход усилителя-приемника 7, асигнал выборки с выхода усилителяпередатчика 8 через среднюю группуконтактов переключательного элемента 30 - на выход 20. Путь прохождения сигнала обратной выборки не изменится. Контакты РЗ служат дляподключения к управляющему входуусилителя-передатчика 8 уровня логического нуля при переключениипитания канала для исключения .выда 1104497чи сигналов помехи и линию выборки.Изменение положения переключательного элемента 30 с...
Устройство защиты от перегрузки усилителя мощности с трансформаторным выходом

Номер патента: 449415
Опубликовано: 05.11.1974
МПК: H02H 3/08
Метки: выходом, защиты, мощности, перегрузки, трансформаторным, усилителя
...радиотехнических устройств, подвергающихся перегрузкам от внешних источников.Известно устройство защити от перегрузки усилителя мощности с трансформаторннм выходом.Известное устройство, защищая откритий транзистор усилйтеля мощности от перенапряжений, не защищает усилитель мощностй от перег зок по ТОуель изОбретения - Обеспечение защити усилителя мощности по току и наприанию - достигается тем, что в предлагаемом устройстве последовательно со вторичной ОбЬОтйтОЙ тРаНСфОРМатОРа ВКЛЮЧЕНа дополнительная обмотка, а параллельно указанным обмоткам подключены два встречно=параллельно включенных тиристора, упрамшщие 061 е/26-9 (51) М Кпнсе Й/08 нсзз/ес(ии к,к(еа (. ее.а (и б" . "и й и и кы ;301, Рау(и кая наб. Ми :б, 1 (ниик(и екав иеб . 2...
Датчик угла скручивания

Номер патента: 1776989
Опубликовано: 23.11.1992
Авторы: Бакуев, Пинаев, Тихомирова, Фирсов
МПК: G01B 11/26
Метки: датчик, скручивания, угла
...призмы и ориентированный гипатенузной гранью перпендикулярно падающим пучкам обоих оптических блоков, коллиматорных объективов бплоское зеркало 7, сопряженное с отражателем 5 и установленное за последними обоих оптических блоков параллельно гипатенузной грани отражателя, четвертую и пятую прямоугольные призмы, на входных патентных гранях которых размещены выходные третья и четвертая щелевые диафрагмы. Далее в каждом оптическом блоке последовательно за четвертой и пятой призмами 8 установлены проекционные обьективы 9, отражательные прямоугольные пятая и шестая призмы 10, ориентированные гипатенузными гранями взаимна перпендикулярна одна относительно другой, между которыми рэспалакена восьмая суммирующая прямоугольная призма 11,...
Следящий привод

Номер патента: 652529
Опубликовано: 15.03.1979
Авторы: Барунтаев, Иоаннисиан, Фольц
МПК: G05B 11/01
...которого устанавливается в соответствии с коэффициентами передачи кинематнческих.цепей привода, подается на вход сумматора 1. Таким образом, есливыполня ется соотношение Нос, Кавос, = Иос 2 Крос, где Кос и Коса -коэффициенты передачи датчиков, обратной связи 4 и 8 соответственно;Кроа и Кросс, -коэффициенты передачи кинематических цепей от вала датчика обратной связи 4 к первому входу дифференциала 9 и от вала датчика обратнойсвя65252 9 5зи 8-ко второму входу дифференциала соответственно, то при нулевых значениях напряжения на выходах задаюпего устройства 14 скорость врашения выходного.вала дифференциала 9 о =О, а скорости 5 врашения выходных валов исполнительных двигателей 3 и 7 связаны соотношениемс 4Р - сОД 1(Р, тгде си и 05 й, -...
Предыдущий патент: Устройство для тревожной сигнализации
Следующий патент: Преобразователь кода в угол поворота вала
Случайный патент: Двухскоростная фрикционная муфта