Устройство для моделирования нейрона
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
О П И С А Н И Е 1 ц)6829 ЮИЗОБРЕТЕНИЯ Союз Советских Социалистических Республик(61) Дополнительное к авт. свид-ву22) Заявлено 23.05,77 (21) 2490145/18) М. Клвб 066 7( исоединением заявки Государственный комите(23) ПриорОпубликовДата опуб 681.33 (088,8 о 30,08.79. Бюллетень3 кования описания 30,08.79 по делам изобретений и открытий72) Авторы изобретен Ю. В. Чернухин и Г, А. Галуев Таганрогский радиотехнический институт им, В. Д, Калмыков) УСТРОЙСТ Изобретение относится к бионике и вычислительной технике и может быть использовано в качестве элемента нейронных сетей для моделирования биологических процессов, в устройствах распознавания обра зов, а также в качестве элемента структур, предназначенных для решения систем алгебраических уравнений, задач исследования операций, краевых задач теории поля.Известно устройство для моделирования 10 нейрона 1, содержащее пороговый элемент, подключенный ко входам устройства и к суммирующим элементам, элемент И, элемент НЕ, разрядную и зарядные цепи и широтно-импульсные модуляторы, 15Недостатком известного устройства является нестабильность параметров, наличие входов двух типов, что ведет к усложению его конструкции.Наиболее близким техническим решением 20 к изобретению является модель нейрона 121, содержащая и блоков изменения синаптических весов, первые входы которых являются входами устройства, выходы соединены со входами сумматора, отдельный вход, подключенный к схемам управления величиной порога пластического нейрона и ко вторым входам блоков изменения синаптических весов, блок сравнения уровня ритмической активности и блок усиления, 30 Недостатком этого решения является малая точность моделирования и ограниченные функциональные возможности.Цель изобретения - повышение точности моделирования. Указанная цель достигается тем, что в устройство введены второй сумматор и пять цифровых интеграторов. Выход первого сумматора подключен к первому входу первого цифрового интегратора, выход которого соединен с первым входом второго сумматора, выход которого подключен к первому входу второго цифрового интегратора. Его выход соединен с первыми входами третьего и четвертого цифровых интеграторов. Выход третьего цифрового интегратора является выходом устройства. Выход четвертого цифрового интегратора связан со вторым входом второго сумматора, к третьему входу которого подключен выход пятого цифрового интегратора. Его первый вход и второй вход второго цифрового интегратора соединены с одним управляющим входом устройства. Вторые входы и блоков изменения синаптических весов и вторые входы первого, третьего, четвертого и пятого цифровых интеграторов соединены с другими управляющими входами устройства соответственно.3Структурная схема устройства представлена на чертеже.Устройство содержит входы 1 , 1 каждый из которых может быть как возбуждающим, так и тормозящим; д блоков изменения синаптических весов 2 ь, 2, выполненные в виде цифровых интеграторов, управляющие входы Зь , 3, подключенные к входам подынтегральных функций (вторые входы) цифровых интеграторов 2, , 2, первый сумматор 4, осуществляющий пространственное суммирование, входных сигналов, первый цифровой интегратор 5, вход 6, соединенный со вторым входом интегратора 5 и управляющий изменением веса пространственного суммирования, второй сумматор 7, второй цифровой интегратор 8, третий цифровой интегратор 9, представляющий собой выходной блок устройства и реализующий пороговый эффект, вход 10, который подключен к второму входу цифрового интегратора 9 и управляет изменением веса выходной величины, четвертый цифровой интегратор 11, вход 12, который подключен ко второму входу интегратора 11 и управляет изменением длительности временного суммирования, пятый цифровой интегратор 13, вход 14, который соединен с входами переменной интегрирования (первые входы) интеграторов 8, 13 и управляет изменением независимой переменной, вход 15 который подключен к второму входу интегратора 13 и управляет изменением значения порога.Для задания режима функционирования устройства на его управляющие входы 3 , 3, 6, 12, 10 и 15, подключенные к входам регистров подынтегральных функций цифровых интеграторов 2 ь , 2, 5, 11, 9 и 13, подаются соответствующие значения синаптических весов, веса пространственного суммирования, длительности временного суммирования, веса выходной величины и порога, которые записываются и хранятся в регистрах подынтегральных функций соответствующих интеграторов, После этого на специальный вход 14 подаются значения приращений независимой переменной. С данного момента устройство готово к приему входных сигналов, поступающих с выходов других элементов, объединенных с этим элементом в нейроноподобную сеть, либо от датчиков информации, моделирующих рецепторные нейроны. Входные сигналы через входы 1, 1 устройства поступают на входы переменных интегрирования цифровых интеграторов 2 ь , 2, в которых умножаются на соответствующие значения синаптических весов, хранящихся в регистрах подынтегральных функций этих блоков. Полученные произведения с выходов цифровых интеграторов 2 ь , 2 поступают на входы 4. Сумматор 4 осуществляет суммирование поступающих на его входы произведений и передает полученную сумму на 5 10 15 20 25 30 35 40 45 50 55 60 65вход переменной интегрирования интегратора 5, в котором эта сумма умножается на соответствующее значение веса пространственного суммирования, записанное в регистре подынтегральной функции этого интегратора. Полученное произведение с выхода интегратора 5 поступает на первый вход сумматора 7, на третий вход которого с выхода интегратора 13 подается произведение значений порога и независимой переменной, причем значение порога хранится в регистре подынтегральной функции интегратора 13, а значение независимой переменной подается с управляющего входа 14. В этот же момент значение результата временного суммирования, полученное на предыдущем шаге (на первом шаге оно равно нулю) и хранящееся в регистре подынтегральной функции 8, умножается в нем на значение независимой переменной (задаваемое с специального входа 14) и поступает на вход переменной интегрирования цифрового интегратора 11, в котором дополнительно умножается на значение длительности временного суммирования (записанное в регистре подынтегральной функции интегратора 11) и подается на второй вход сумматора 7. Результат временного суммирования, полученный на данном шаге в сумматоре 7, поступает на вход приращений подынтегральной функции интегратора 8, в котором суммируется со значением временной суммы, полученной на предыдущем шаге. После суммирования значение временной суммы в следующем шаге умножается на приращение независимой переменной. Полученное произведение с выхода интегратора 8 поступает на вход переменной интегрирования интегратора 9, в котором умножается на значение веса выходной величины, хранящееся в регистре подынтегральной функции этого интегратора, и полученное произведение сравнивается с нулем, Если это произведение больше нуля, то на выходе устройства появляется выходной сигнал. Если произведение отрицательное, то сигнал на выходе отсутствует.Процессы, происходящие в устройстве, описываются следующей системой разностных уравнений:ЬУ 1;.Ц = - вУ,.Ы+1 У, - 1у= гпах ) 6; у,); у 1 р. ц Ы = уьМ, где а - значение длительности временногосуммирования; у; - значение временной суммы, полученной в предыдущем шаге; М - приращение независимой переменной; Р - значение веса пространственногосуммирования;у; - синаптические веса;у - входные воздействия, поступающиена 1-м шаге;В - значение порога;К - значение веса выходной величины,Можно показать, что если в системе (1) а равно единице и Л 1 равно единице, то решение этой системы примет следующий вид:лУ 1+Ц = з 10 п1, У" -И1=1что соответствует алгоритму работы формального нейрона.Если а равно нулю, М равно единице, К равно единице и на выходе устройства ис пользуются одноразрядные приращения, то решение системы (1) примет следующий вид:1 - 1 лУ 1 - 1 п(;У 1 - Е, 20:О 1:1что совпадает с алгоритмом работы нейрона, реализующего механизм временного суммирования входных сигналов.Если положить и в интервале от нуля до единицы и Л 1 в интервале от нуля до единицы и использовать на выходе устройства многоразрядные приращения, то решение , системы (1) аппроксиммирует решение следующей системы дифференциальных урав-нений= - Р Р)+-";.(У,Р)у,(1) = гпах (О; й у (1) - , 6 ),которая описывает работу аналогового нейрона.То есть без изменения конфигурации связей между цифровыми интеграторами и 40 цифровыми сумматорами эта схема позволяет моделировать формальный нейрон, модель аналогового нейрона и модель нейрона, реализующего механизм временного суммирования. Кроме того, при задании со ответствующих значений указанных параметров устройство может работать в режиме сумматора, цифрового интегратора, реализующего формулу прямоугольников, генератора и элемента памяти.Благодаря введению новых блоков и связей повысилась точность моделирования.Формула изобретенияУстройство для моделирования нейрона, содержащее п блоков изменения синаптических весов, первые входы которых являются входами устройства, а выходы соединены со входами первого сумматора, отличающееся тем, что, с целью повышения точности моделирования, в него введены второй сумматор и пять цифровых интеграторов, выход первого сумматора подключен к первому входу первого цифрового интегратора, выход которого соединен с первым входом второго сумматора, выход которого подключен к первому входу второго цифрового интегратора, выход которого соединен с первыми входами третьего и четвертого цифровых интеграторов, выход третьего цифрового интегратора является выходом устройства, выход четвертого цифрового интегратора подключен к второму входу второго сумматора, к третьему входу которого подключен выход пятого цифрового интегратора, первый вход которого и второй вход второго цифрового интегратора подключены к одному управляющему входу устройства, вторые входы п блоков изменения синаптических весов и вторые входы первого, третьего, четвертого и пятого цифровых интеграторов соединены с другими управляющими входами устройства соответственно.Источники информации,принятые во внимание при экспертизе 1. Авторское свидетельство СССР429435, б 06(.1 7/60, 1972.2. Авторское свидетельство СССР211168, С 1 066 760, 1966 (прототип),Составитель А. ЯицковРедактор Р, Киселева Техред Н. Строганова Корректор Е. ОсиповЗаказ 2366/16 Изд.559 Тираж 780 Подпнсно НПО Поиск Государственного ко,", итета СССР по делам изобретений и открыты113035, Москва, Ж.35, Раушская набд. 45ипография, пр. Сапунова, 2
СмотретьЗаявка
2490145, 23.05.1977
ТАГАНРОГСКИЙ РАДИОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. Д. КАЛМЫКОВА
ЧЕРНУХИН ЮРИЙ ВИКТОРОВИЧ, ГАЛУЕВ ГЕННАДИЙ АНАТОЛЬЕВИЧ
МПК / Метки
МПК: G06G 7/60
Метки: моделирования, нейрона
Опубликовано: 30.08.1979
Код ссылки
<a href="https://patents.su/4-682910-ustrojjstvo-dlya-modelirovaniya-nejjrona.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для моделирования нейрона</a>
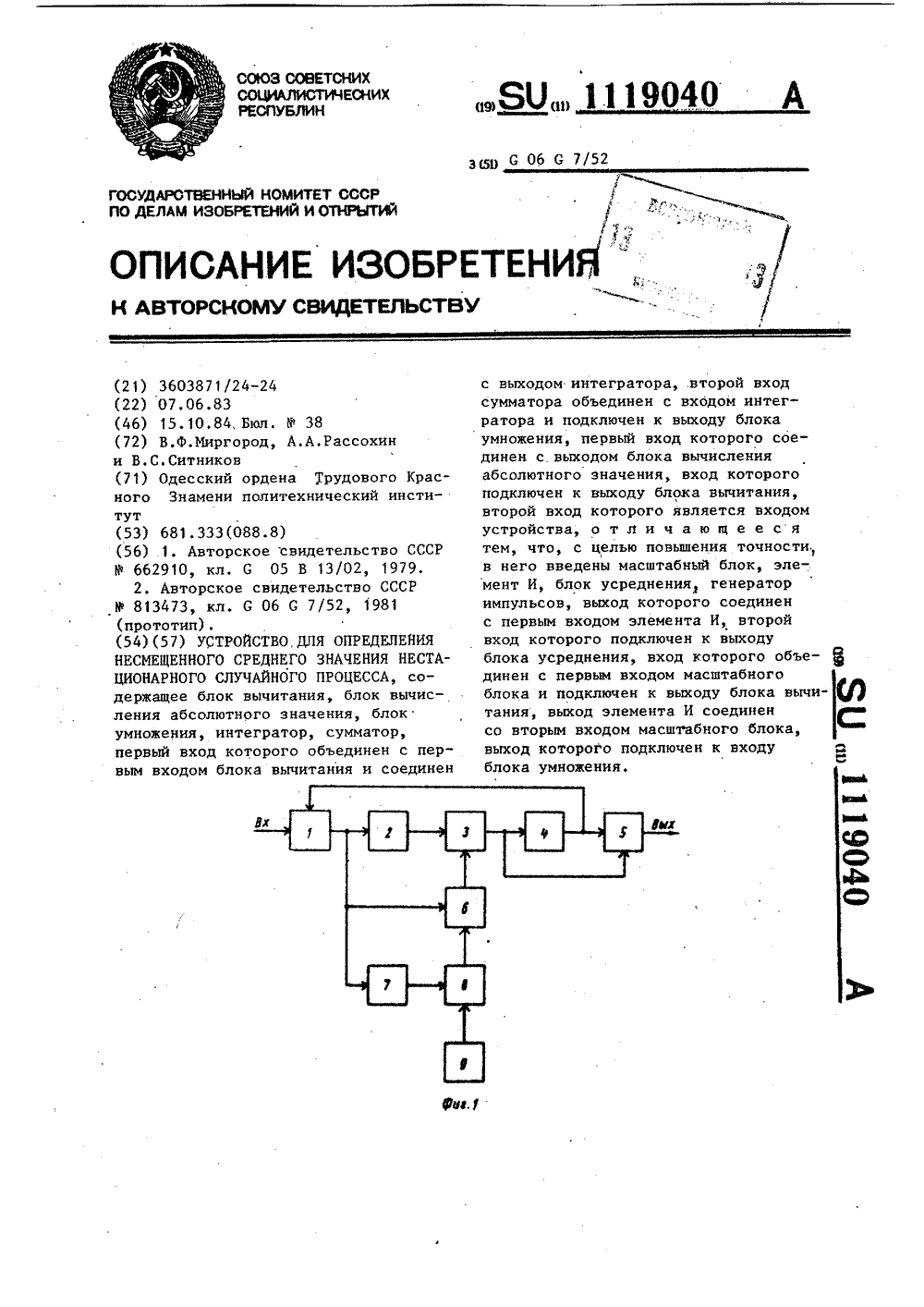
Устройство для определения несмещенного среднего значения нестационарного случайного процесса
Номер патента: 1119040
Опубликовано: 15.10.1984
Авторы: Миргород, Рассохин, Ситников
МПК: G06G 7/52
Метки: значения, несмещенного, нестационарного, процесса, случайного, среднего
...1линейного блока 1 3.Однако известное устройство характеризуется невысокой точностью опрецеления среднего значения.Наиболее близким к предлагаемомуявляется устройство для определениясреднего значения нестационарногопроцесса, содержащее блок вычитания,первый вход которого является входомустройства, блок умножения, сумма 30тор, блок вычисления абсолютной величины и интегратор, при этом выходблока вычитания подключен к входу блока вычисления абсолютной величины ик первому входу блока умножения,второй вход которого соединен с вы- З 5ходом блока вычислЕния абсолютнойвеличины, выход блока умножения подключен к входу интегратора и к первому входу входу сумматора, второйвход которого соединен с вторым40входом блока вычитания и с...
Устройство для экспресс-оценки среднего значения периодов случайного процесса

Номер патента: 252732
Опубликовано: 01.01.1969
Автор: Датиашвили
МПК: G06F 17/18
Метки: значения, периодов, процесса, случайного, среднего, экспресс-оценки
...счетчика 9. Первый возникающий импульс устанавливает триггер 10 в единичное положение, и информация через схему 13 записывается на вход + счетчика 9. Второй импульс устанавливает триггер 10 в нулевое положение, и информация через схему 12 записывается на вход-счетчика 9. При этом осуществляется операция вычитания. Если происходит преобразование монотонно-возрастающей функции, то 5, - 5.,(о,где 5 - число импульсов, соответствующеепервой ординате,5 - число импульсов, соответствую щесвторой ординате.Каждый нечетный импульс в ряду отсчетаосуществляет перевод триггера 10 в единичноеположение со сбросом счетчика 9 и подготовкуприема информации со входа + (сложение),Знак разности,Л 5 = 5, - 5 с+1,фиксируемый в знаковом разряде 19...
Делительное устройство с частотным выходом

Номер патента: 746573
Опубликовано: 05.07.1980
Автор: Барьюдин
МПК: G06G 7/16
Метки: выходом, делительное, частотным
...два канала управления выходным генератором 4: быстродействующий, в котором сигнал-делителя Освязан с генератором непосредствен- З 5но, а сигналы делимого и делителя(Ол и О) - через согласующий усилитель 3, медленнодействующий,включающий блоки 1,2,5,6, компенсационного типа, в котором сигналы Щуправления на выходной генератор политель постоянного тока и суммирующий усилитель. возможности выполнения в предложенном устройстве блоков 3 и 4 безинерционными,Статическая точность обеспечивается компенсационной частью схемы,которая при наличии отклонения частоты Г от истинного значения,вызванного изменением параметров блоков3 и 4, вырабатывает сигнал разбаланса. Этот сигнал образуется в результате сравнения блоком суммированиясигналов О и О с...
Устройство для диагностики неисправностей цифровых интеграторов

Номер патента: 877551
Опубликовано: 30.10.1981
Автор: Криворучко
МПК: G06F 11/26
Метки: диагностики, интеграторов, неисправностей, цифровых
...информационные входы 28 проверяемого цифрового интегратора. Одновременно входной коммутатор 10 подключает соответствующийконтрольный выход 27 проверяемого цифрового интегратора ко входу блока 7 сравнения, а бло 1 12 формирует на соответствующем элементе ИЛИ 18 извременных импульсов, поступающих израспределителя 6, соответствующиймикроциклу первой проверки проверочный код и выдает его через соответствующий элемент И 17, на,другой входкоторого поступает разрешающий сигнализ дешифратора 3 1 и выходной элемент ИЛИ 19 на другой вход блока 7 поразрядного сравнения. Блокпроизводит поразрядное сравнение кодов, поступающих с контрольных выходов 27 проверяемого цифрового интегратора через коммутатор 10, с проверочными кодами, поступающими из...
Устройство для регистрации времени входа и выхода

Номер патента: 963026
Опубликовано: 30.09.1982
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...впемени входаи выхода содержит датчики.1 направления, 55блок 2 считывания, элементы И 3 и 4, компараторы 5, задатчики 6 адреса, элементы ИЛИ7 и 8, блок 9 контроля кода, блок 1 О управ. ления, счетчик 11 импульсов, блок 12 регист. рации, датчик 13 времени и пульт 4 управления.При наличии заявки с любого блока 2 считывания через первый элемент ИЛИ 7 запускается блок 10 управления, который сЬормирует1код текущего адреса блока 2 считывания и выдает его на компараторы 5. В задатчиках 6 адресов блоков 2 считывания при монтаже устройства заложены их порядковые номера. Комнаратор 5, укоторого поступивший код совпал с кодом задатчика 6 алреса, открывает элементы И 3 и 4. Инфоомация, считываемая с жетона - пропуска, ппедставляет собой...
Предыдущий патент: Устройство для моделирования линейных систем
Следующий патент: Устройство для моделирования пневмодвигателя
Случайный патент: Предохраниельное устройство для двурогого крюка