Способ динамической градуировки датчиков давления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1569630
Автор: Максимов-Григорьев

Текст
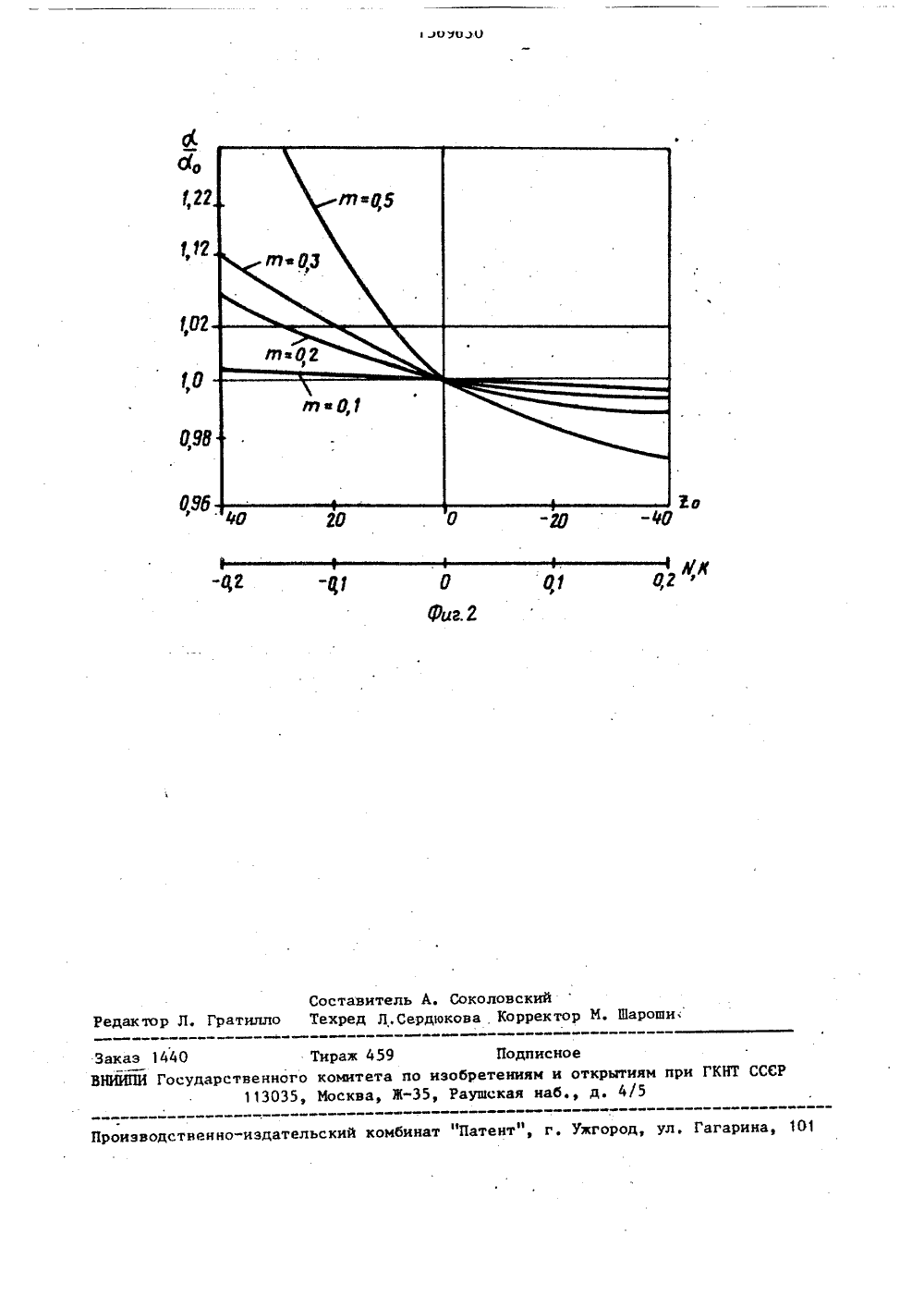
ОЦИАЛИСТИЧРЕСПУБЛИК ц) С 01 Ь 27/О ОПИСАНИЕ ИЗОБРЕТЕНИ АВТОРСКОМУ СВИДЕТЕЛЬСТВУ 21игорье СССР981.СР1982РО льство7/00,ство С27/00,КОИ ГРАДУИ змерино осо ки датч ков,ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР(57) Изобретение отнотельной технике, а имединамической градуиро давления. Целью изобретения являетсярасширение диапазона воспроизводимыхдавлений и повьппение точности. В ра"бочую камеру 1 с гнездами 5 для калибруемых датчиков 4, заполняемуюжидкостью, вводят через сопло 2 камеры 1 рабочий орган 3 в виде веретена,обладающий определенной кинетическс.";энергией. Рабочий орган 3 специаль :спрофилирован, что позволяет точкерассчитать параметры создаваемого имимпульса давления в камере 1, с которыми и сравнивают выходной сигнал калибруемого датчика. 2 ил.)чпл 1 ЗО ЭЭО, РЙ 6ьгде Я, - средняя по сечению скорость11 - объемный расход;р 2 КК - гидравлический 35градиус в проходном сечениипроточной части;в = -- отношение проходной плоРочщади сужающего устроистван (Й - Пнл,)Рв сечении и-и к проходнойплощади Р в сечении в-в(перед сужающим устройством Реализация предложенного способаг 5 С осуществляется устройством, выполнен ным по принципиальной схеме высокоскоростного гидротормоза, основными элементами которого являются тормозная камера, выполненная в виде сосу 55 да 1 (цилиндрического) с профилированным горлом в виде сопла 2 и проФилированный рабочий орган 3 веретенно" го типа, К рабочему органу присоеди" Изобретение относится к контрольно-измерительной технике, а именно к способам динамической градуировки датчиков давления.Цель изобретения - расширение градуируемого диапазона переменных давлений при одновременном повышении точности динамической градуировки за счет повышения амплитуды и снижения продолжительности нарастания давления.На фиг. 1 показана принципиальная схема устройства для воспроизведения жпульса давления в жидкости, реализующего предлагаемый способ; на фиг. 2 - кривые зависимости коэффициента расхода от конструктивных параметров проточной части и параметров нестационарности истечения жидкости через сужающее устройство,На фиг. 2 приняты следующие обозначения: коэффициент расхода в нестационарном режиме;коэффициент расхода в квазистационарном режиме;-200 Б =-200 К - параметр нестационарности; нен плунжер 4. Тормозной массе плунжера 4 и рабочего органа сообщаетсякинетическая энергия. Процесс торможения основан на вытеснении рабочейжидкости через сужающее устройство,образуемое соплом 2 и рабочим органом3 веретенного типа, и сопровождаетсяобразованием импульса давления в жидкости. Сосуд 1 снабжен гнездами 5 дляустановки градуируемых датчиков. Профиль тела вращения рабочего органаопределяется уравнением площадь продольного сечения рабочего органа;длина рабочего органатекущее значение поперечного сечения профилированного рабочего органа Я = й (Ь), определяемое из уравнения где р; - текущее значение коэффициента расхода жидкости в нестационарном, режиме истечения;С- площадь поперечного сечениясопла;ч - текущее значение скороститорможения рабочего органас присоединенным к немуплунжером 4 ч= Е(Ь);Р " - текущее значение давлениясимпульса Р, = й(Ь);- ускорение свободного падения;- весовая плотность жидкости.При этом зависимость между кинетической энергией рабочего органа с присоединенным к нему плунжером и давлением импульса определяется уравне- нием огде М - приведенная масса рабочегооргана с плунжером;ч - скорость разгона,ка продолжительность импульса не пре-вьппает его максимального значения306к нему плунжером, которому сообщена кинетическая энергия, при этом профиль рабочего органа определяется со- отношением 15696 1 аьимпрьса юокпл 1 Р=" Ь,где Б прор 11 ля Бйь 2 Р,члл Б ПЛ 1 где е(,Б аале Формула изобретенияК уф2 где М - приведенная масса рабочегооргана с плунжером; тт - скорость рабочего органа перед вытеснением жидкости(скорость разгона); а продолжительность импульса не пре" вышает его максимального значения, аьН 216 ЮЬСО 2 Л 1 Л КС1 Рюл 1 П р и м е р Сосуд 1 заполняют жидкостью (водой, например). Рабочему органу 3 с присоединенным тормозным плунжером 4 сообщают кинетическую энергию. Затем гасят кинетическую энергию путем вытеснения жидкости из сосуда 1 через сужаицее устройство, образуемой соплом 2 сосуда и рабочим органом. Этот мгновенный процесс сопровождается образованием импульса давления в жидкости, профиль которого 15 и соответственно динамические параметры оцениваются расчетным путем на основе профиля рабочего органа 3, условий нестационарности истечения вытесняемой жидкости, определяемых кри О выми на фиг. 2, н кинетической энергии. С установленного в гнезде 5 градуируемого датчика давления поступает на регистрирующую аппаратуру выходной сигнал, определяющий реакцию дат чика на нормированный испытательный импульс давления. По реакции датчикана нормированный импульс давления оценивают динамические параметры и выполняют, таким образом, динамическую 30 градуировку датчика давления. Способ динамической градуировки З 5 датчиков давления путем воздействия на воспринимающий элемент датчика импульсным давлением и регистрации выходного сигнала датчика, о т л и - ч ающий с я тем, что, с целью рас-,щ ширения градуируемого диапазона переменных давлений при одновременном повышении точности динамической градуировки за счет повьппения амплитуды и снижения продолжительности нараста ния давления воспроизводимого испытательного импульса, импульсное давление создают путем вытеснения жидкости иэ сосуда с горлом в виде сопла через сужающее устройство, образуемое соплом и профилированным в виде веретена рабочим органом с присоединенным- площадь продольного сечения рабочего органа; - длина рабочего органа;текущее значение с;.;еречного сечения рабочего органа, Б.в " Е," (в месте прохождения через сопло), определя-, емое из уравнения текущее значение коэффици-. ента расхода жидкости в не- стационарном режиме исте.;.: - ния, п(1, = 1(Ь) Рплощадь поперечного сечения сопла;текущее значение скорости торможения рабочего органа с присоединенным к нему плунжером;ускорение свободного падения;весовая плотность жидкости, текущее значение импульсного давления, Р,; = Е(Ь), определяемое из соотношенияРРБ аьоЭОУОЭО г Фиг.2 оставитель А. Соколовскийехред Л,Сердюкова Корректор М, Шароши Г то оиз венно-издательский комбинат "Патент", г. Ужгород, ул. Гагарина, 1 Заказ 144ВНИИПИ Гос Тираж 459 ственного комитета по 113035, Москва, ЖПодписноезобретенияи и открытиям при ГКНТ С Раушская наб., д. 4/5
СмотретьЗаявка
4106355, 11.08.1986
ПРЕДПРИЯТИЕ ПЯ А-1097
МАКСИМОВ-ГРИГОРЬЕВ ИВАН ИВАНОВИЧ
МПК / Метки
МПК: G01L 27/00
Метки: градуировки, давления, датчиков, динамической
Опубликовано: 07.06.1990
Код ссылки
<a href="https://patents.su/4-1569630-sposob-dinamicheskojj-graduirovki-datchikov-davleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ динамической градуировки датчиков давления</a>
Регулятор давления рабочей жидкости для гидросистемы грузоподъемной машины

Номер патента: 238747
Опубликовано: 01.01.1969
Автор: Грнцюк
МПК: B66C 23/82
Метки: гидросистемы, грузоподъемной, давления, жидкости, рабочей, регулятор
...диаметра плунжера 4 и регулиРОВКОИ ) СИЛИЛ ПЖИНЫ Э ДОСТИГЯЕТС 51 ТЯКОЕ состояние, при которо) полият 11 Г)мз нс превышает определенной задаинои велииНь, пл 1 Н)кер 4 1 Ол ер)киваег 5 Пружиной О в и-О л и О )и О з о ж еи и и, т 2 к к я к с О 3.Г ь а е ) О с Г ) )- зом давление и в состояни прсололсть усилие этои п)у)1 Б 1 ны. В это) Слу 1 Яе кяк пр:1 подъеме, так и при опускании стрелы жидкость свооолно протекает через регулятор.При 11 аличии в рабочем орга;с груза балыке опрслелсцной залаион вел:чины давле- ИИС ЖИЛОСТИ и ИДРОЦ;ЛИЛ)Е ПОЛЪС)а ВО,- лсйствуст Н 2 плу,нжер 4, сжи,Яст 11)ужину д настолько, что золотник 2 под действием пруж 11 пы д 1 герекрывает прОходной кггггы;1регу" лятора.При подаче жидкости на подъем...
Регулятор давления рабочей жидкости

Номер патента: 371091
Опубликовано: 01.01.1973
Авторы: Кареев, Кисв, Сыпало, Филатов
МПК: B30B 15/22
Метки: давления, жидкости, рабочей, регулятор
...реохорд 2, усилитель 3 рассогласования, ге нератстр 4 управляемой частоты, ключ 5,блок б управления шаговым двигателем, шаговый двигатель 7, регулирующее устройство 8, пресс 9, ключ 10, генератор 11 управляемой частоты и задающее устройство 12.20 Устройство работает следующим образом.При наборе давления в системе пресса, который осуществляется обычно по произвольному законну (давление;в системе может быть набрано и по программе), сигнал с манометра 25 1 сравнивается с сипналом, поступающимс реохорда 2. Сигнал рассогласования через усилитель 3 подается на генератор 4 управляемой частоты, на выходе которого при этом появляются импульсы с частотой следования, ЗО пропорциональной величине рассогласования.371091 Составитель Г. Ильин...
Устройство для изменения давления рабочей жидкости в пузырьковой камере

Номер патента: 325497
Опубликовано: 25.02.1974
Автор: Семенов
МПК: G01L 9/00
Метки: давления, жидкости, изменения, камере, пузырьковой, рабочей
...а 5 привод выполнен в виде магнитной системы,размещенной коаксиально, создающей импульсное или бегущее магнитное поле, которое, взаимодействуя с поршнем, перемещает его, изменяя давление в пузырьковой камере.10 Предлагаемое устройство схематически изображено на чертеже.Электропроводящий или ферромагнитныйпоршень 1 помещен в цилиндр 2, соединяющий сосуды с рабочей жидкостью 3 и 4, Ко аксиально горловине размещается магнитнаясистема (привод) 5, состоящая из обмотки или ряда обмоток, которые создают импульсное или бегущее магнитное поле.Подбором соответствующих параметров пи тающего устройства, размеров поршня, размеров и количества обмоток магнитной системы, можно получить необходимые усилия для перемещения поршня и создания заданного...
Демпфер для гашения пульсаций давления рабочей жидкости

Номер патента: 1171636
Опубликовано: 07.08.1985
Авторы: Дудников, Михеев, Шевель
МПК: F16L 55/052
Метки: гашения, давления, демпфер, жидкости, пульсаций, рабочей
...ударов, н может быть использовано в. химической, 5 нефтедобывающей промышленности, в оросительных системах сельского хозяйства, в водо- и теплоснабжении городов и поселков,1 Цель изобретения - расширение диапазона регулирования.На чертеже представлен демпфер для, гашения пульсаций давления рабочей жидкости, общий вид. Демпфер содержит корпус 1, внутренняя полость 2 которого через фланцы Э и 4 сообщена с защищаемой гидро- магистралью 5.На поверхностираздела 2 О жидкости и газа установлен поплавок 6, на котором закреплена втулка 7, На ее боковой поверхности установлен излучатель 8 ультразвука, В донной части 9 корпуса установлена с зазором относительно втулки 7 пружина 10, ограничивающая в осевом направлении перемещение втулки 7...
Демпфер для гашения пульсаций давления рабочей жидкости

Номер патента: 2005255
Опубликовано: 30.12.1993
МПК: F16L 55/04
Метки: гашения, давления, демпфер, жидкости, пульсаций, рабочей
...демпферснабжен датчиком уровня рабочей жидкости, соединенным с внутренней полостью и установленным на крыщке корпуса электропневмоклапаном.Сущность изобретения поясняется чертежом, на котором дан общий вид демпферэ в разрезе,Демпфер представляет собой цилиндрический корпус 1 с крышкой 2. В нижней части корпуса 1 имеется пэтрубок 3 с фланцем 4 для установки на магистральном трубопроводе 5, Внутри корпуса 1 размещен кольцевой поплавок 6. в отверстие поплавка б вставлена втулка 7 из изоляционного ма 5 10 15 20 25 30 35 40 45 териала. На втулке 7 смонтирован электрический разрядник 8. Между крышкой 2 и поплавком 6 установлена спиральная пружина 9, ограничивающая перемещение поплавка б в осевом направлении. В крышке 2 установлены втулки 10...
Предыдущий патент: Индуктивный датчик для измерения зазора и давления между двумя поверхностями деталей
Следующий патент: Устройство для измерения эффективной площади сильфонов
Случайный патент: Способ прогнозирования яичной продуктивности кур по физиологическому показателю