Идентификатор магнитного состояния ротора гистерезисной машины
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1545175
Автор: Тарасов
Текст
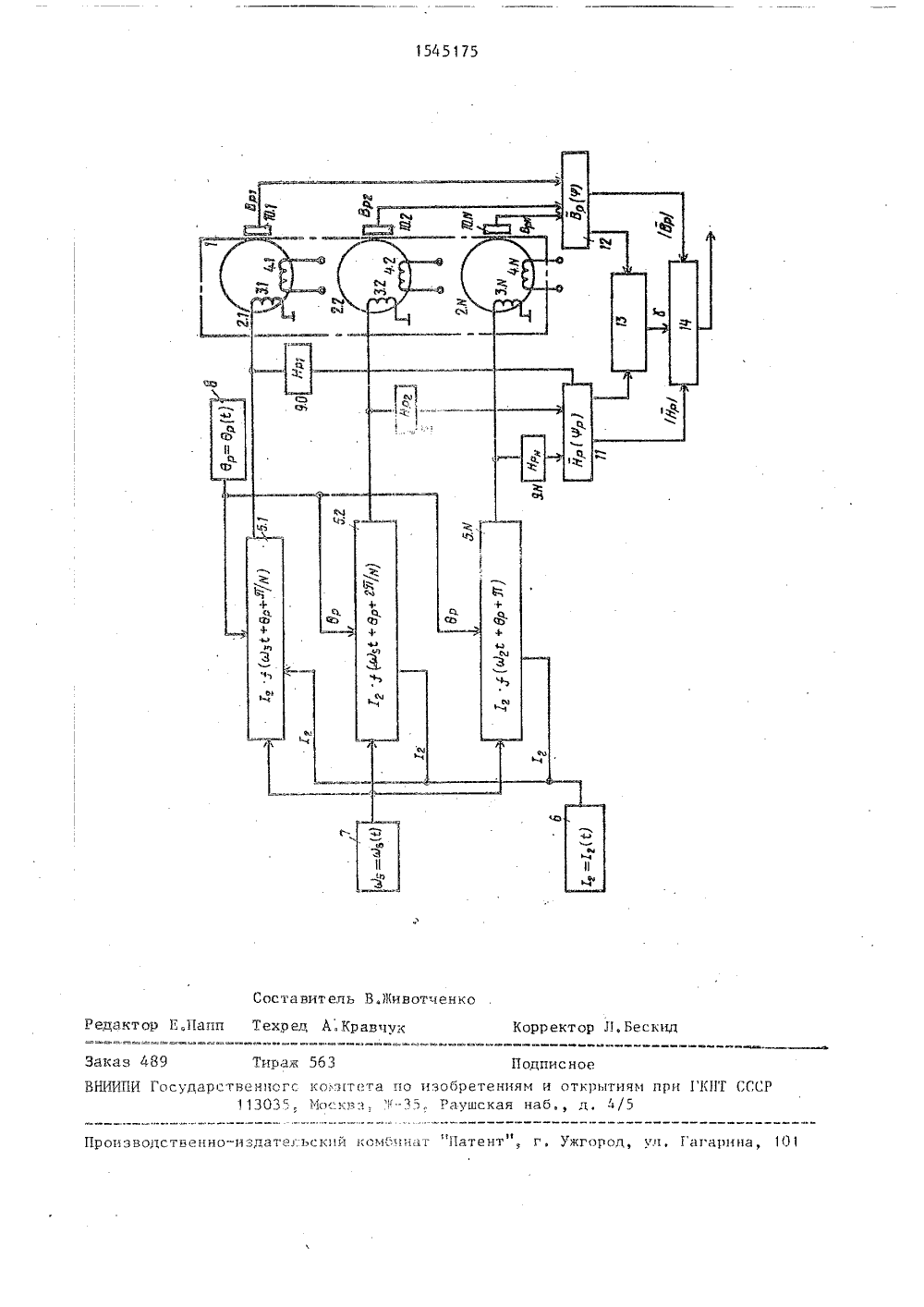
(51) 5 3/ ИСАНИЕ ИЗОБРЕТЕН К АВТОРСКОМУ ЕЛЬСТВ 7) Изобретение относ ельной технике и мож я к измерибыть исполь характерисЦелью изобние функциечет увелидуемых матедо"тигается 1 ля исследовани т ер е зис ных маши является расши ов тик ги ретени оменклатуры иссл ротора. Эта цель ч ения иа ится к электроной технике ино для исследгистерезисных Изобрет ехнике и е от змерител с пол ьз теристит а функцитора маггистерезисмитатор 1 ротора,И замкнутых магниГОСУДАРСТВЕННЫЙ НОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТНРЦТИПРИ ГКНТ СССР(56) Марков 1 О.Г. Исследование и методы расчета синхронного режима гистерезиса реактивного двигателя.Канд, дис. - М,: МЭИ, 1975,(54) ИДЕНТИФИКАТОР МАГНИТНОГО СОСТОЯНИЯ РОТОРА ГИСТЕРЕЗИСНОЙ МА 111 ИНЫ нальных возможностеи з может бьггь и овавания харак кмашин.Цель изобретения - расширенифункциональных возможностей заувеличения номенклатуры исследматериалов ротора.На чертеже представленональная схема идентификанитного состояния ротораной машины.Схема содержит ивыполненный в виде ЯО 1545175 ем, что имитатор ротора вьп 1 олнен виде замкнутых магнитопроводов, акивная часть которых состоит из материала ротора гистерезиснои машины,а имитатор статора состоит из намагничиваюгих обмоток, расположенных на отдельных магнитопроводах. Система измерения состоит из блоков регистрации напряженности и индукции каждого магнитопровода. Намагничивающие обмотки соединены с выходами формирователей магнитодвижущей силь 1 ротора, входы которых соединены с блоком задания результирующего тока ротора, генератором скольжения и блоком задания угла поворота, Блоки измерения напряженности и индукции соединены выходами соответственно с блокамн нахождения результирующих значений пер- ф ф вых гармоник распределения напряженности и индукции, выходы которых почключены к блоку определения угла взаимного сдвига векторов напряженности и индукции, 1 ил. топроводов 2,1, 2.2 2 Л, активная часть которых состоит из материала ротора гистерезисной машины,а имитатор статора состоит из И намагничивающих обмоток 3,1, 3.2ЗЛ. На магнитопроводе могут бытьрасположены дополнительные обмотки4.1, 4.2,4.И, используемые для калибровки системы измерения составляющих поля, например, индукционным методом, Формирователи 5,1, 5.2,5 К заданной величины и функции распределения магнитодвижущей силы ротора в общем случае реализуют функциюпространственного сдвига периодичес 155175+ Ор+ КГ/И), где 1 - ток, задаваемыйблоком задания результирующего тока,приложенного к ротору, - формируется блокомб, 1(Ы с + 8 + К/И) - функцияраспределения ейгнитодвижущей силы порасточке статора и соответственно ротора, реализуемая Формирователем 5.К,К = 1, 2, , И. Перемагничиваниекаждой точки ротора осуществляется, с частотой скольжения ы, формееруе мой блоком 7 и в соотвествии с угло вой координатой ротора Г/И относительно произвольно выбранного исходного состояееияПри частоте скольжения ы =.- 0 угловое положение кривой распределениямагнитодвижущей силы изменяется нсоответствии с законом изменения угг)ла 8 = Вр(й), задаваемого блкоегзадания угла поворота.Блоки Формирователей заданной не 1 личины и Функции распределения магнитодвижущей силы ротора соединены входаеы с выходами блоков 6 - 8 а ихУвыходы соединены с намагничиваюпуеми.обмотками 3,1, 3,2, , З.И каждогомагнитопровода.Блоки 9.1, 9.2,9.И измерениянапряженности и .блоки 10,1, 10.2, ..,3010 И индукции выходами соединены сблоками 11 и 12 нахождения результиру"ющих значееееей первых гармоник распределения напряженности и индукции соответственно, выходы которых подключены к блоку 13 определения угла взаиыного сдвига Векторон ееяпряженееОстии индукции. Кроме того, выходы блоков 11 - 13 могут быть подключены кблоку 14 ныполнения электромагнитно- фго момента гистерезисной машины,Функциональная модель идентификатора состояния ротора гистерезисноймашины предусматривает Физико-акалитическое определение составляющих поля р от ора с дал ьнейшимвычислениеммомента,физическая часть модели содержитИ замкнутых магнитопронодов 2.1,2,2. . . 2,И, которые выполнены ли Обо полностью из материала ротора гистерезисной машины, либо частично,но таким образом, что основная доляпадения магнитного потенциалаГ = Нр 1,+ Н г+ Н 1(1) приходилась на Нг 1, характеризующую материал ротора. Дополнительная часть.Нд и Н 1 - пацение потекР Р циала в воздушных зазорах и магнитном замыкателе, На магнитопроводы намотаны намагничивающие обмотки 3,1,3.2, , З,И, а также вспомогательные для цепей калибровки датчиковиндукции и контр Оля,Каждая намагничивающая обмоткачерез датчик тока соединена с собственным Формирователем заданной величины и Формы .распределения МДС,формируемые этими блоками функции нремеьного изменения тока подчиняются следующей закономерности;1 З к 1 г р(ЧР) Э г.П(445 + К Й ) е (2)где 1 4(юр) - закон распределения по ротору напряженности: поля, К=1, 2ИЕсли принято гармоническое распределение напряженности, то 1 ц(ч ) заменяется эквивалентной величиной 1,. Величина тока 1 г определяется экспериментально или рассчитывается из схемы замещения гистерезисной машины. Все формирователи 5.1, 5.2,5.И синхронизованы общим генератором частоты скольжения (блок 7), Вьптолнение Формирователей заданной Формы и величины функции распределения ГЯС может быть различным, Блоки определения напряженности поля в каждом магнитопроводе могут быть построены, н частности, на базе датчиков тока с последующим пересчетом тока в напряженность Блоки определения индукции также построены на базе методов измерения индукции, В них целесообразно использование преобразователей Холла.Блоки 11 и 12 нахождения векторов напряженности Н Ы Н и индукции В р (у) представляет собой вычислительные блоки, осуществляющие нахождение результирующих векторов в системе координат Йи О 5, нращающейся с частотой скольжения ыСумма проекций мгновенных значений напряженности на оси Лр и с 1 равнаМ и7 Нр =Н.,эг.п у,. и 1 Нре=ЕН;созгдег 1Н; - мгновенные значения напряженности (тока), определяемые блоками 91, 9,2 , 9,Иа гг. = Е - ПОЛОЖЕния элементов ротора на полюсном делении.Определение и расчет взаимного положения векторов производится при од"5 15451новременном считывании и вычислении их составляющих в блоках 11 - 13,Идентификатор позволяет имитировать процессыперемагничивания ротора гистерезисной машины в асинхронном режиме с любым уровнем потока,в синхронном режиме при изменениинагрузки и произвольном повороте ротора, при намагничивании и размагничивании ротора в асинхронном и синхронном режимах,Формула изобретенияИдентификатор магнитного состояния ротора гистерезисной машины,содержащий имитатор ротора с установленными на нем системами определениянапряженности и индукции магнитного рополя и имитатор статора, о т л и ч аю щ и й с я тем, что, с целью расширения функциональных возможностей засчет увеличения номенклатуры исследуемых материалов ротора, имитаторротора выполнен в виде М замкнутыхмагнитопроводов, активная часть которых выполнена из материала роторагистерезисной машины, а имитатор статора состоит из И намагничивающихобмоток, каждая из которых расположена на отдельном магнитопроводе,при этом в устройство дополнительно, введены И формирователей величины 75 би функции распределения магнитодвижущей силы ротора, генератор частоты скольжения, блок задания результирующего тока ротора, блок задания угла поворота, блоки нахождения результирующих значений первых .гармоник распределения напряженности и индукции, блок определения угла взаимного сдвига векторов напряженности и индукции, а системы измерения напряженности и индукщщ состоят из блоков измерения напряженности и индукции каждого магнитопровода, при зтом намагничивающие обмотки каждого магнитопровода соеди" иены с выходами формирователей вали" чины и функции распределения магнитодвижущей силы ротора, входы которых соединены с блоком задания результирующего тока ротора, генератором частоты скольжения и блоком задания угла поворота, блоки измерения напряженности и индукции соединены соответственно своими выходами с бло" каин нахождения результирующих значений первых гармоник распределения напряженности и индукции, выходы которых подключены к блоку определения угла взаимного сдвига векторов напря.женности индукции, где АГ-. число разбиений полюсного деления машины на элементарные объемы ротора, характеризуемые общим законом перемегничнвания.Сост а вит ель В Ли вотч енк оЕЛапп Техрец А; Кравчук Реда Бескид Корре Ри 1 ЕНГ (ССР нт Ужго Гагарин Заказ 489 Тираж 503 НИИПИ Государственцогс когитет1 1 3 ОЗ 5, ,1 ос кв а,роизводственно-издате.сьский колбин т "П Подписноеетениям и открытиямшская наб., д. 4/5
СмотретьЗаявка
3765129, 26.06.1984
МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ
ТАРАСОВ ВЛАДИМИР НИКОЛАЕВИЧ
МПК / Метки
МПК: G01R 33/00
Метки: гистерезисной, идентификатор, магнитного, ротора, состояния
Опубликовано: 23.02.1990
Код ссылки
<a href="https://patents.su/4-1545175-identifikator-magnitnogo-sostoyaniya-rotora-gisterezisnojj-mashiny.html" target="_blank" rel="follow" title="База патентов СССР">Идентификатор магнитного состояния ротора гистерезисной машины</a>
Емкостной трансформатор напряжения с демпфирующим блоком для предупреждения феррорезонанса

Номер патента: 1356020
Опубликовано: 30.11.1987
Авторы: Борю, Ковбаса, Небрат, Паук
МПК: H01F 27/42
Метки: блоком, демпфирующим, емкостной, предупреждения, трансформатор, феррорезонанса
...замкнуты через размыкающиеконтакты 1 реле 8. Выходные зажимы12 и 13 ЕТН подключены к выводам 14и 15 дросселя 7 насыщенияЕТН работает следующим образом,35В установившемся режиме высокоенапряжение делится емкостным делителем обратно пропорционально величинам емкостей конденсаторов 1 и 2,трансформируется промежуточным трансформатором 4, выравнивается до требуемого класса точности ЕТН компенсирующим реактором 3, причем контакты 11 реле 8 замкнуты и ток во внешнюю цепь ЕТН проходит через встречнопараллельно включенные тиристоры 9и 10 (при этом сопротивление этихтиристоров приблизительно на два порядка ниже сопротивления токоограничивающего резистора 6). При возник 50новении короткого замыкания во вторичной цепи ЕТН срабатывает реле 8 и его...
Способ предварительного напряжения металлического пространственного блока

Номер патента: 519526
Опубликовано: 30.06.1976
Авторы: Кармилов, Мельников, Попов, Туллер
МПК: E04B 1/24
Метки: блока, металлического, предварительного, пространственного
...блока с созданием в нем предварительного папряжения осуществляют в следу.25 ющем порядке. Блок, сложенный в транспортабельнос положение (фиг. 2), перевозят на монтажную площадочку. Затем на сборочной площадке перед монтажом прикладывают к поясам 1 разнонаправленные продольные уси.30 лия Р (фиг. 3) и смещаот пояса относитель 51926но решетки 7 одного направления до получения конструкции необходимой высоты, кривизны и требуемой величины, предварительного напряжения. После этого блоку придают геометрическую неизменяемость и фиксируют ве личину предварительного напряжения,при помощи решетки 8 дру 1 гого направления, которая может присоединяться либо при,помощи шарнира 6 с отверстием в нем для пропуска соединительного болта, либо...
Устройство для измерения мгновенной частоты вращения ротора гистерезисного электродвигателя

Номер патента: 1120243
Опубликовано: 23.10.1984
Авторы: Богоявленский, Позднухов, Прудников
МПК: G01P 3/48
Метки: вращения, гистерезисного, мгновенной, ротора, частоты, электродвигателя
...триггера подключен к выходу датчика положения ротора, а выход 15 -триггера - к блоку регистрации изменения мгновенной частоты вращения, блок взаимного регулирования импульсов датчика положения ротора и синхрониэирующега импульса согласующего делителя частоты, в последний введены формирователь корректирующего импульса, два логических элемента И, дна блока переключения, второй делитель частоты с коэффициентам деления М , причем входы первого блока переключения соединены с формирователем корректирующего импульса и с датчиком положения ротора соответственно, а выход первого блока переключепия подключен к первому нходу второго логического элемента И, второй вход которого соединен с выходом согласующего делителя частоты, а выход логического...
Способ стабилизации мгновенной частоты вращения ротора гистерезисного электродвигателя

Номер патента: 1164850
Опубликовано: 30.06.1985
МПК: H02P 7/36
Метки: вращения, гистерезисного, мгновенной, ротора, стабилизации, частоты, электродвигателя
...дискриминатора 5, второй вход которого подключен к датчику 3 положения, а выход через блок 6 выделения низкочастотной составляющей мгновенной частоты вращения ротора соединен с вторым входом блока 4, Второй вход блока 6 подключен к блоку 7 задания минимально допустимого уровня качаний ротора. Выход блока 10 7 подключен к фазам гистерезисного электродвигателя 2.Согласно данному способу контролируют фазу низкочастотной составляющей мгновенной частоты вращения рото ра с помощью датчика 3 положения ротора, устанавливают факт превышения нестабильности частоты вращения заданного уровня, определяемого блоком 7 задания минимально допустимого 20 уровня качаний ротора по достижению низкочастотной составляющей мгновенной частоты вращения ротора,...
Устройство для регулирования напряжения и распределения нагрузки параллельно работающих генераторов его варианты

Номер патента: 1272403
Опубликовано: 23.11.1986
Автор: Хижняков
МПК: H02J 3/46
Метки: варианты, генераторов, нагрузки, параллельно, работающих, распределения
...источников питания. Усилитель 51 реализует по обоим каналам равный коэффициент усиления, 12724035 1 О 15 20 25 30 40 45 50 55 зФормирователь сигналов (фиг. 4) содержит входной резистор 58, балластный резистор 59, стабилитрон 60, триггер Шмидта 61 и инвертор 62.При протекании тока через соответствующий разделительный диод на резисторе 58 падает напряжение, которое подается через резистор 59 на вход триггера Шмидта и возбуждает его. В случае большого сигнала на входе триггера срабатывает стабилитрон 60 и ограничивает его амплитуду. Выход триггера Шмидта 61 подается на вход инвертора 62 для инверсии его статической характеристики. Рассмотрим работу устройства по первому варианту.Пусть генераторы 1 - 3 включены на параллельную работу...
Предыдущий патент: Устройство для испытания полупроводниковых приборов
Следующий патент: Устройство для измерения постоянного магнитного поля
Случайный патент: Соединение деталей