Способ измерения параметров многомерной вибрации или движения твердых тел
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
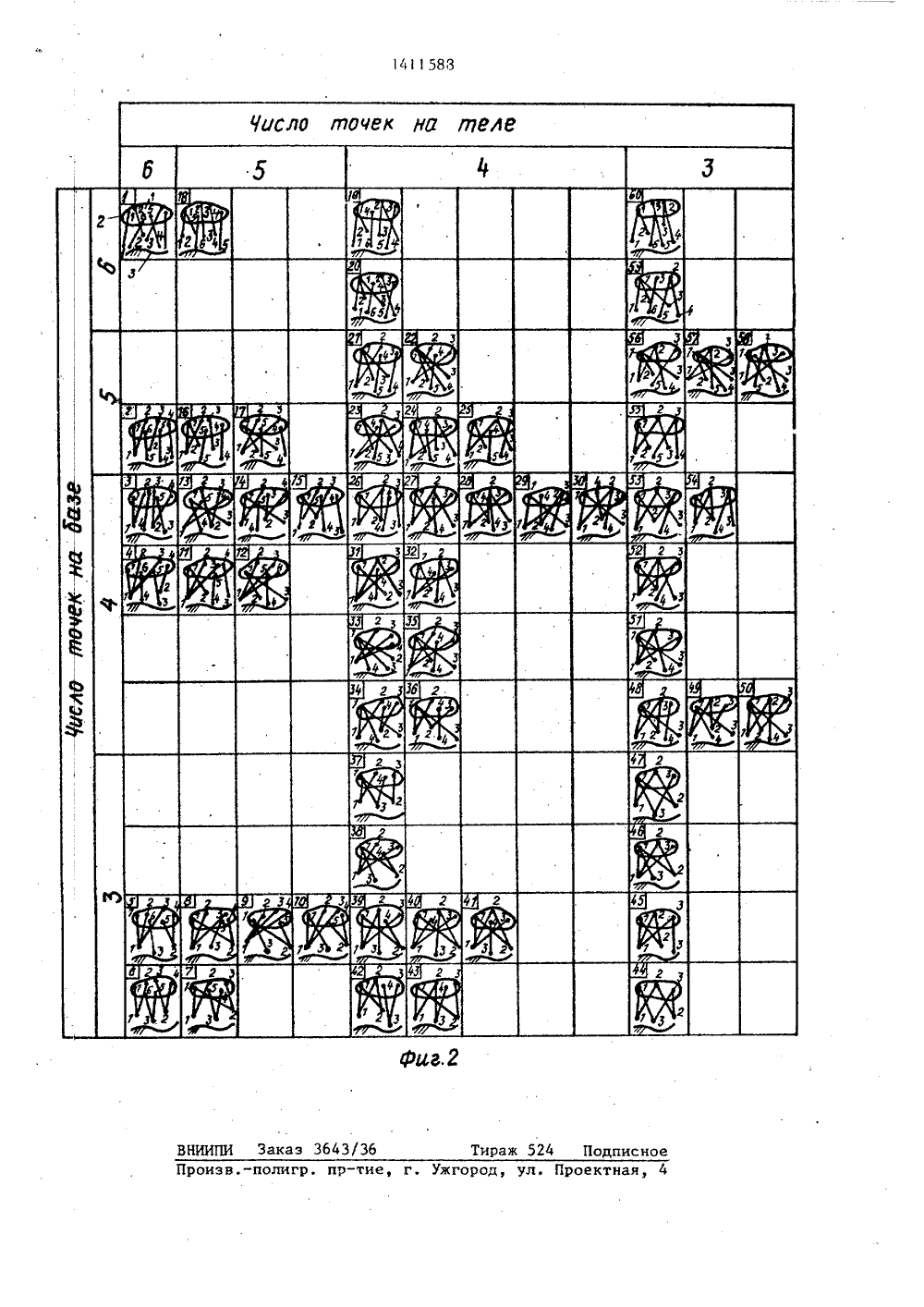
11588 СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСКИРЕСПУБЛИК 19) (11 114 С 01 Н 1/О ВСЕСОРЛ%.% ТЕ;.Я "ф ,1 ЛР 0 ТГ 1, У СПИ Е РЕТЕНИ СВИДЕТЕЛЬСТ АВТ еВ МНОТВЕРмериния ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИИ(71) Институт машиноведенияим, А.А. Благонравова и Институт мханики АН ГДР(54) СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОГОМЕРНОЙ ВИБРАЦИИ ИЛИ ДВИЖЕНИЯДЫХ ТЕЛ(57) Изозтельной е бретение относится к и технике. Целью изобрет является повышение точности измерения. Поставленная цель достигаетсятем, что выбирают на теле и на базевне его соответственно от трех дошести не лежащих на одной прямой точек, связывают их шестью отрезками, непересекающимися более трех в однойточке, лежащими не менее, чем в трехплоскостях и не более трех в однойплоскости, не пересекающихся трех водной точке в случае параллельчоститрех других, при этом углы между отрезками должны быть возможно меньшими. Располагают на теле датчики ускорения или скорости, или перемещенияинерциального типа так, чтобы их измерительные оси были ориентированывдоль отрезков. Регистрируют показания датчиков, 1 з.п, ф-лы, 2 ил.Изобретение относится к измеритеой технике.Цель изобретения - повышение точти измерения параметров вибрации5 вижения твердых тел.На фиг. 1 изображена схема иэмере" я пар;метров; на фиг, 2 - то же, рианты.Способ осуществляют следующим обзом.Способ измерения параметров оснон на описании положения и перемещея твердого тела в пространстве прн мощи 1-координат - шести отрезков ,1,,1 , соединяющих точки тела точками неподвижной базы так, что и заданных значениях 1 т,1 ,,1 разуется геометрически неизменяея структура. В различных структурах 20 координат на теле и на базе сооттственно может быть от трех до сти не лежащих на одной прямой то" к, а соединяющие их шесть отрезков гут пересекаться не более трех в ной точке и расположены не менее, м в трех плоскостях и не более ех в одной плоскости. Кроме того, случае параллельности трех отрез- в три других отрезка не пересека ся в одной точке. В 1-координатах авнения движения свободного тверго тела имеют вид: ль п 1 о м 1 в ш т(с) Ь 1 ъ= (с); 1 э= сэ (с); ,т(с) э 1= Еу(с)16= Е(с)(1) ифференцируя уравнение по с, полу"тают:401,= К,(с); 1,= Е,(с); 1 э= э(с);1 = й+ (с) 11= й (с); 1= К (с), (2) 1 т т(с) ф 1 т 2(с)э э (с)1= 1 а(с); 1= К(с); 1 = К,(с). (3) Таким образом, измерив ускорения, скорости или перемещения вдоль шести 50 ртрезков, соединяющих точки тела 1 с гочками базы 3, с помощью уравнений (1)-(3) при известных начальных условиях можно полностью определить параметрьт движения тела 1 в пространстЭе. На фиг. 1: в.1щ.б- точки тела; в. 1щ.б - точки базы системы 1-координат (точки базы): Дифференцируя по с уравнения (2),т 1 олу чаюта 5в 1 в 1 й.2 щ.2; щ.б щ.б; 11 э1 щ, 1 щ,2; щ. 2 щ.б; щ.б щ.1. 1г11 с= 6В (2) и (3) 1 т,1 у фэ 1 и 11 э 1 вф 1 - соответственно проекции скоростей и ускорений точек тела 1 (фиг.1);1, и 1- точки в,1 на отрезок1щ. 1 в. 1; 1и 1- точки щ. 1 на отрезок в.1 в,2; 1 и 1 э - точки щ.2 на отрезок щ,2 в,2; 1 о и 1 т - тоттки в.2 на отрезок в.2 щ.б; 1 и 1 точки щ.б на отрезок щ.бв,б; 1 и 1 - точки щ.б на отрезок щ.бщ. 1.Расположив датчики .2 ускорения или скорости, или перемещения инерциального типа в точках 1 6 тела 1 и измеряя ускорения скорости или перемещения вдоль соединяющих эти точки тела 1 с точками 16 базы 3 вести отрезков в. 1 щ, 1; в. 1 в. 2; в. 2 в, 2; в.2 в.б; тп.бщ.б; в.бтп. 1, определяют движение тела 1. Возможные схемы расположения датчиков на теле 1 и точек на базе 3 показаны на фиг. 2.При измерении параметров вибраций, для которых характерны малые пространственные перемещения тела 1, опорные точки базы 3 рассматриваются как неподвижные. При значительных перемещениях тела 1 в пространстве датчики 2, установленные на нем, перемещаются вместе с телом 1, ттрй этом линии измерения датчиксе 2 изменяют свою ориентацию в просбранстве, что влияет на обработку измерительной информации.В начальньщ момент Со движения тела 1 точки в.1в.б занимают иэ" вестное положение В неподвижной системе О, определенное координатами й 1(х ттув,Евт) еащеб(хв,ф ф о у щ,т, х .с )известны также начальные значения 1 т 11 т 1-координат, а точки тела 1 щ. 1щ.б определены в системе ОтТело 1 движется в пространстве в течение некоторого интервала дс. При этом, считая в этом интервале точки в.1ш.б неподвижными, по показаниям датчиков 2 определяют значения (1 то+ д 1),.,(1 т,+ 41), соответствующие времени (с+ бс,).Используя преобразования координат, определяют положение точек в. 1 в.б в системе осей О тэ при значени" ях 1-координат (1 тр + Ы,)(1+ + Ы ). Затем определяют новое поло 14115883жение в системе осей Оху 2 фточек, совершающих движение вместе с телом 1,которые в начальный момент 1 совпав.6, ля этогодали с точками ш,1., Дусловно принимают тело 1 уза баэ сопорными точками в. 1,1ш.6 координаты которых найдены для моментад ф используют начальные значения 1-координат 111 10О 1 ф1. определяющих текущее положение базы относительно тела 1. В результате определяются соответствующи е значениям).Ь.1 ффЗатем дается приращение ас уи казанные вычисления повторяются вновьи т.д, Обработка информации а зависимости от целейлей ее использования можетпроизводиться в реальном времени илипо запомненным значениям сигналовдатчиков 2.Предлагаемый способ позволяет путем соответствующего выбора точек нателе 1 и на базе 3 уменьшить угол меж ду измерительной осью каждого датчикаи направлением вектора я (ускорение свободного падения), что ведет к повышению точности измерении.Ф о р м у л а изобретения1 Способ измерения параметров многомернои в ибрации нли движения твердых тел с использованием датчиков уси пе емещениякореения или скорости, или ринерциальиого типа, отличающи йс.я теем что с целью повышения точности измерения, задают нателе и на базе соответственно оттрех-до шести не лежащих на однойпрямойямой точек а измерения осущест 1вляют вдоль соединяющих оточки тела сточками базы шести отрезков, которыемогут пересекаться не более трех воднои точкчке и расположены не менее,чем в трехех плоскостях и не более трехв одной плоскости,2. Способ по и. 1, о. т л и ч аю щ и и с я тчтем что в случае параллельности одних трех отрезков тридруг их отрезка не пересекаются водной точке.
СмотретьЗаявка
4075485, 18.06.1986
ИНСТИТУТ МАШИНОВЕДЕНИЯ ИМ. А. А. БЛАГОНРАВОВА, ИНСТИТУТ МЕХАНИКИ АН ГДР
КОЛИСКОР АЛЕКСАНДР ШУЛИМОВИЧ, НАХАПЕТЯН ЕВГЕНИЙ ГРИГОРЬЕВИЧ, СЕРГЕЕВ ВЛАДИМИР ИВАНОВИЧ, ЧАКАРОВ САВВА, ФЕДОСЕЕВА ОЛЬГА ГЕОРГИЕВНА
МПК / Метки
МПК: G01H 1/00
Метки: вибрации, движения, многомерной, параметров, твердых, тел
Опубликовано: 23.07.1988
Код ссылки
<a href="https://patents.su/4-1411588-sposob-izmereniya-parametrov-mnogomernojj-vibracii-ili-dvizheniya-tverdykh-tel.html" target="_blank" rel="follow" title="База патентов СССР">Способ измерения параметров многомерной вибрации или движения твердых тел</a>
Прибор для построения перспективы точек по их координатам в ортогональной проекции

Номер патента: 130188
Опубликовано: 01.01.1960
Автор: Колмакова
МПК: B43L 13/14
Метки: координатам, ортогональной, перспективы, построения, прибор, проекции, точек
...шесте 1 эцях, Взаимодействующих с тремя параллельными зубчатыми рейками, Средняя рейка снабжена шарниром, служащим осью врацсцця двойной кулисы, ки нсматичсскц сВязацной своими концамц с двумя д 1 угцмц зубчатымц рейками.На номограмме показаны примеры нахождения координат перспек. тивы точки, когда х=4; у=-40 (при )=40) и когда х=5; у=50 (при =50), В первом случае Х,=2; во втором - Х,=2,5,На схеме прибора (фиг. 2) все три прямолинейных шкалы номограммы превращены в зубчатые рейки 1, 2, 3, взаимодействующие с зубчатыми шестернями 4, б, б, несущими счетные логарифмические ди ски 7, 8 и 9, Зубчатая рейка 2 имеет шарнир 10, служащий осью вращения двойной кулисы 11, концы которой взаимодействуют с цапфами 12 и И, укрепленными на двух других...
Устройство для определения перемещений точек тела человека

Номер патента: 471888
Опубликовано: 30.05.1975
МПК: A61B 5/10
Метки: перемещений, тела, точек, человека
...рамке 3, потенциометры 6 и 7, установленные на внешней рамке 2.Устройство работает следующим образом.5 При произвольном перемещении в пространстве точки тела 8, к которой прикреплена натянутая гибкая нить 5, рамки 2 ц 3 под воздействием усилия Р, развиваемого испытуемым в процессе выполнения движения, од повременно поворачиваются относительнокронштейна 1 так, что центр координат 9, точка 10 приложения усилия Р и внутренней рамке 3 ц точка тела 8 постоянно находятся на одной прямой, совпадающей 5 с радиусом-вектором движущейся точки, имеющим начало в центре координат.Углы поворота рамок, лежащие во взаимноперпендикулярных плоскостях, измеряются потенциометрамц 6 и 7, посредством чего оп ределяется направленце ца точку тела...
Способ определения магнитного момента дипольного источника поля и координат точки приложения этого момента

Номер патента: 1064251
Опубликовано: 30.12.1983
Автор: Смирнов
МПК: G01R 33/02
Метки: дипольного, источника, координат, магнитного, момента, поля, приложения, точки, этого
...Затем изменяют масштаб измеренных компонент векторов магнитной индукции . в указанных точках пространства с учетом исключения компонент вектора однородного магнитного поля, т,е. изменяют масштаб -векторов магнитной 35 индукции в данных точкам пространства и осуществляют поворот этих векторов на один и тот же угол. После ,этого определяют вектор магнитной индукции в третьей точке пространст 40 ва и сравнивают его по величине инаправлению с вектором магнитной индукции, полученным по измеренным . компонентам в этой же точке пространства, В результате сравнения получают разностный вектор магнит" ной индукции, который определяет погрешность, обусловленную выбором начальных параметров (расстояние до дипольного источника и направление на...
Способ определения координат точек фиксации взгляда на объекте наблюдения

Номер патента: 1430027
Опубликовано: 15.10.1988
Авторы: Курочкин, Сидоров, Фомин, Шиф
МПК: A61B 3/10
Метки: взгляда, координат, наблюдения, объекте, точек, фиксации
...Р и Р . Составляются две системыкквадратных уравнений: двух окружностейс центрами Р и Р и радиусами1Б и В и двух окружностей с центрами Р и Р и радиусами В и В.14300 Раскрыв скобки и вычтя в каждойсистеме второе уравнение из первого,получаем одну систему линейных уравненийх(х,-х,.)+у (у. -у,)=А,х(х-х )+у (у -у )=А , (4)где А=В. -В ) -(х,-х )-(у. -у Ц ;а В,=г ; В,=г1 1 к11 1 11 к1,11 кВ =гк к 1(величины В,гЬ и 1 имеют смысл,аналогичный предыдущему). КоординатыТФВ определяют из решения системы (4)по формулам(7 Способ осуществляют путем размеще ния на объекте наблюдения определенного числа ИК излучателей, например светодиодов в заранее заданных точках с .известными координатами, Число диодов определяется требуемой точностью, 3 их...
Способ определения относительных координат точек и устройство для его осуществления

Номер патента: 1446477
Опубликовано: 23.12.1988
Авторы: Баранов, Клюшин, Литвинов
МПК: G01C 15/00
Метки: координат, относительных, точек
...который соединен с двухкоординатным столиком 18координатно-пускового механизма, соосно закрепленные установочный элемент 19 и центрирующую втулку 20,зрительную трубу 21, наклонное зеркало 22,Установочный элемент 19 выполненв виде втулки, выполненной с одногоиз торцов иэ диэлектрического материала, а с другого из торцов " двухполуколец из проводящего материала,причем установочный элемент 19 соединен с одним из входов блока 23 измерений и обработки информации и насосом 24 для удержания тела 4. Другой вход блока 23 соединен кабелем25 с узлами формирования 26 и приема 27 световых пучков.На корпусе механизма 28 управленияузлами формирования 2 б и приема 27световых пучков установлены параллельно и симметрично оси 8 плоскиезеркала 29....