Способ управления параметрами вибродвигателя с прямыми ударами
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1397090
Авторы: Алексеенко, Бансявичюс, Рагульскис

Текст
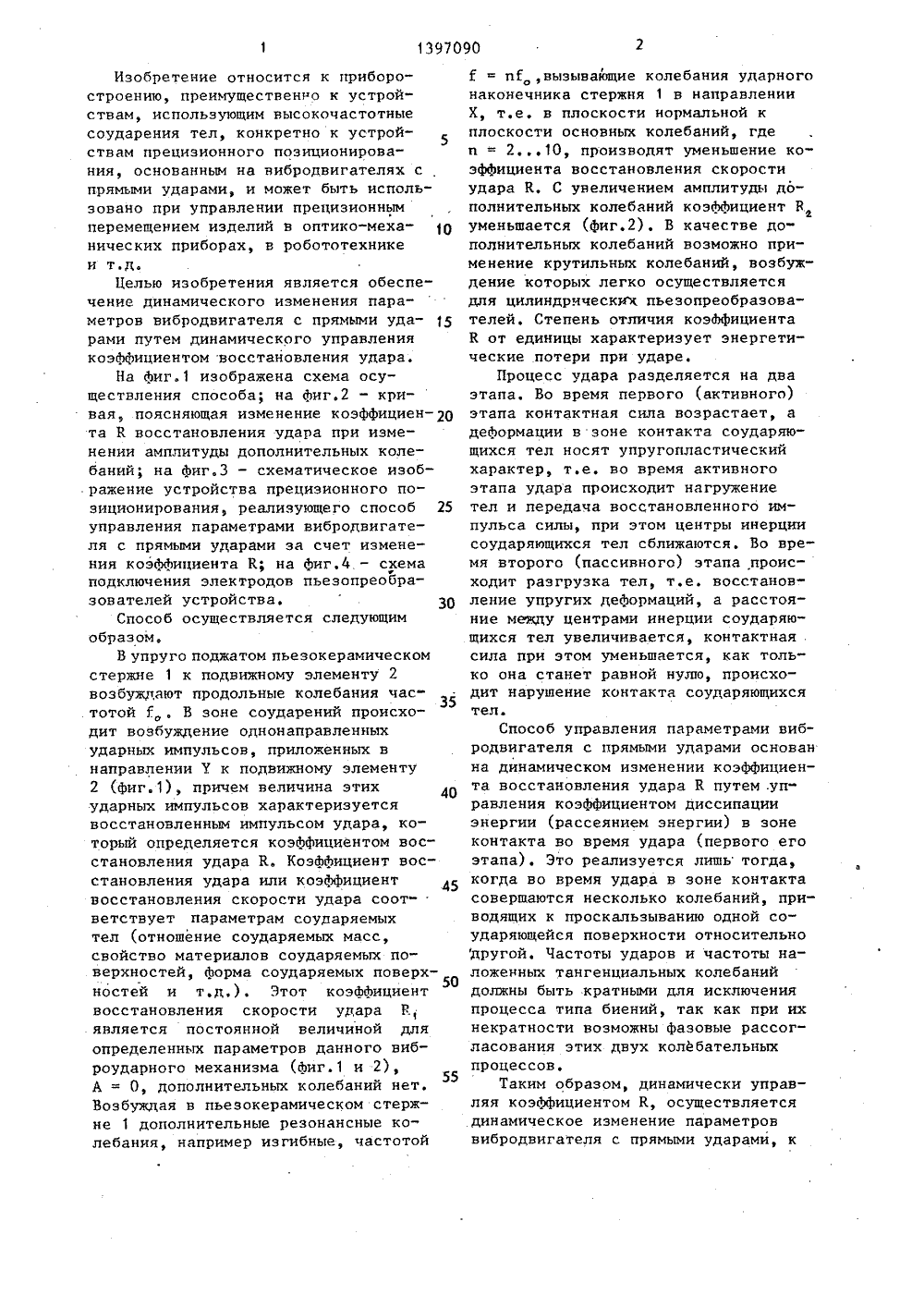
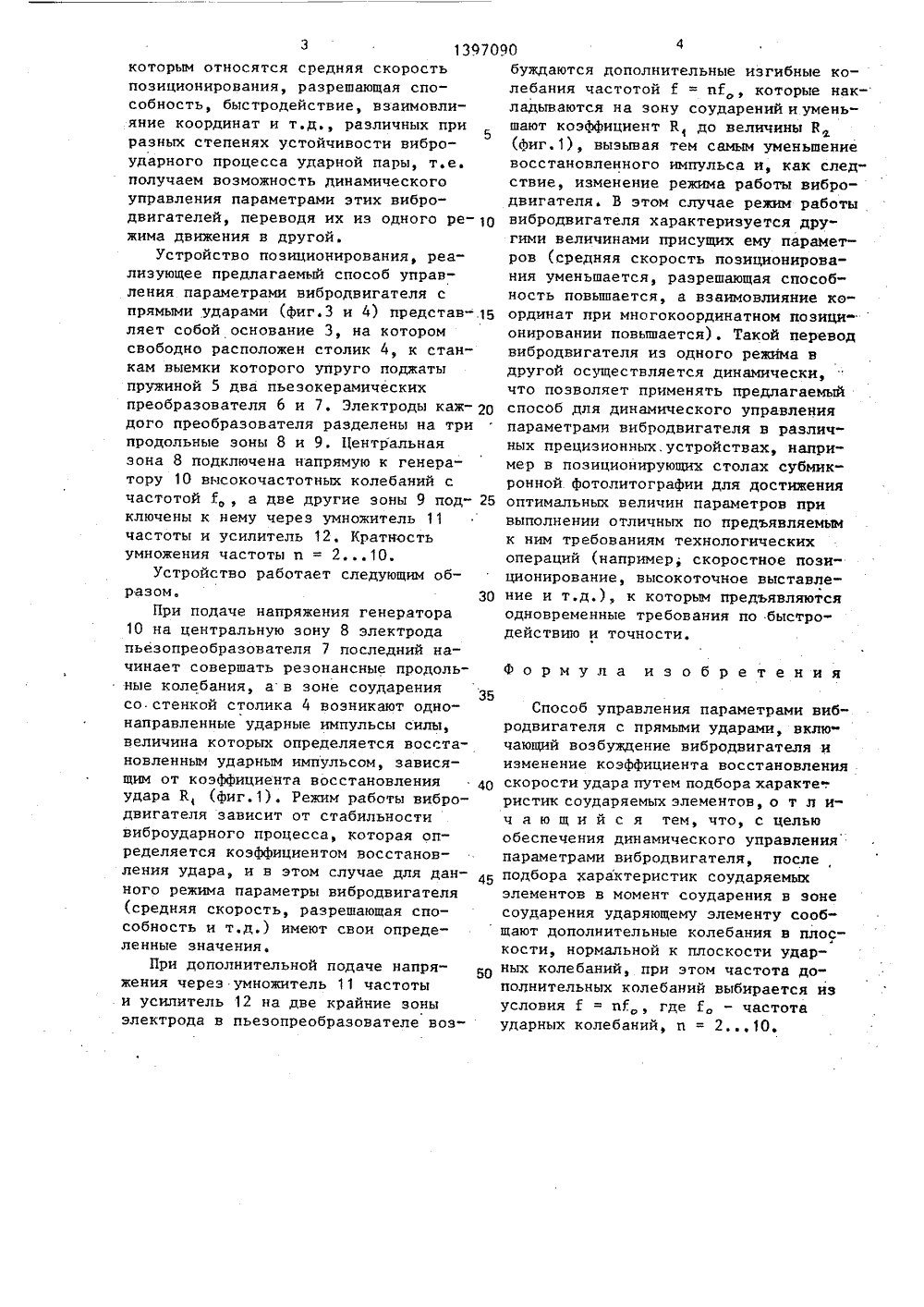
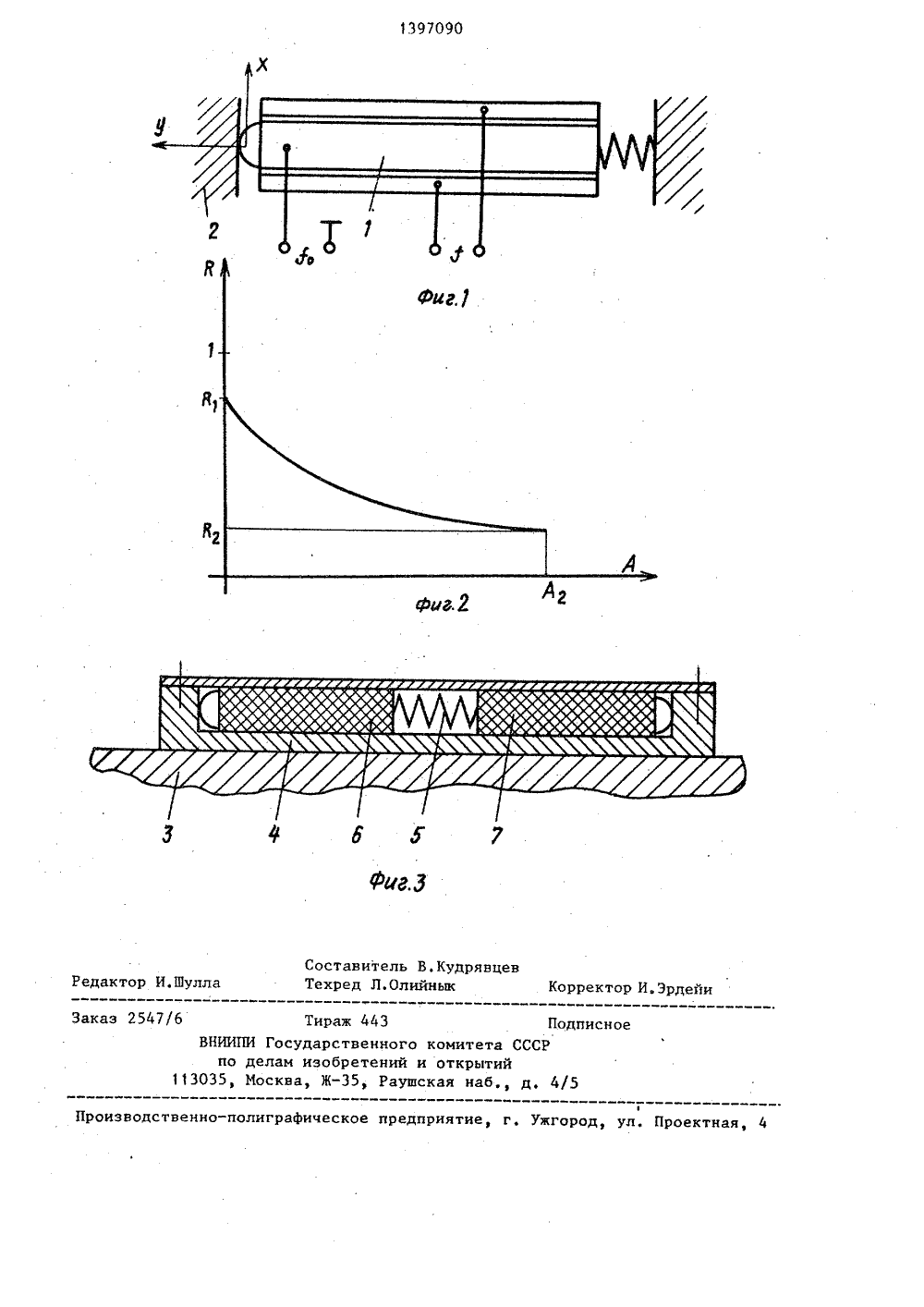
40 Изобретение относится к приборостроению, преимущественно к устройствам, использующим высокочастотные соударения тел, конкретно к устройствам прецизионного позиционирования, основанным на вибродвигателях с прямыми ударами, и может быть использовано при управлении прецизионным перемещением изделий в оптико-механических приборах, в робототехнике И ТеДеЦелью изобретения является обеспечение динамического изменения параметров вибродвигателя с прямыми уда рами путем динамического управления коэффициентом восстановления удара,На Йиг.1 изображена схема осуществления способа; на фиг.2 - кривая, поясняющая изменение коэффициента К восстановления удара при изменении амплитуды дополнительных колебаний; на Йиг.З - схематическое изображение устройства прецизионного позиционирования, реализующего способ 25 управления параметрами вибродвигателя с прямыми ударами за счет изменения коэфйициента К; на фиг,4 - схема подключения электродов пьезопреобразователей устройства. 30Способ осуществляется следующим образом.В упруго поджатом пьезокерамическом стержне 1 к подвижному элементу 2 возбуждают продольные колебания частотой 5 В зоне соударений происходит возбуждение однонаправленных ударных импульсов, приложенных в направлении У к подвижному элементу 2 (фиг.1), причем величина этих ударных импульсов характеризуется восстановленным импульсом удара, который определяется коэйфициентом восстановления удара К. Коэффициент восстановления удара или коэффициент 45 восстановления скорости удара соот" . ветствует параметрам соударяемых тел (отношение соударяемых масс, свойство материалов соударяемых поверхностей, Йорма соударяемых поверх 50 ностей и т.д.). Этот коэййициент восстановления скорости удара Р., является постоянной величиной для определенных параметров данного виброударного механизма (Йиг.1 и 2), А = О, дополнительных колебаний нет. Возбуждая в пьезокерамическом стержне 1 дополнительные резонансные колебания, например изгибные, частотой ГпГ ,вызывающие колебания ударного наконечника стержня 1 в направлении Х, т.е. в плоскости нормальной к плоскости основных колебаний, где и = 210, производят уменьшение коэффициента восстановления скорости удара К. С увеличением амплитуды дополнительных колебаний коэййициент В уменьшается (фиг.2), В качестве дополнительных колебаний возможно применение крутильных колебаний, возбуждение которых легко осуществляется для цилиндрических пьезопреобразователей. Степень отличия коэйфициента К от единицы характеризует энергетические потери при ударе.Процесс удара разделяется на два этапа. Во время первого (активного) этапа контактная сила возрастает, а дейормации в зоне контакта соударяющихся тел носят упругопластический характер, т,е, во время активного этапа удара происходит нагружение тел и передача восстановленного импульса силы, при этом центры инерции соударяющихся тел сближаются. Во время второго (пассивного) этапа происходит разгрузка тел, т.е, восстановление упругих деформаций, а расстояние между центрами инерции соударяющихся тел увеличивается, контактная сила при этом уменьшается, как только она станет равной нулю, происходит нарушение контакта соударяющихся тел.Способ управления параметрами вибродвигателя с прямыми ударами основан на динамическом изменении коэффициента восстановления удара К путем .управления коэффициентом диссипации энергии (рассеянием энергии) в зоне контакта во время удара (первого его этапа). Это реализуется лишь тогда, когда во время удара в зоне контакта совершаются несколько колебаний, приводящих к проскальзыванию одной соударяющейся поверхности относительно "другой. Частоты ударов и частоты наложенных тангенциальных колебаний должны быть кратными для исключения процесса типа биений, так как при их некратности возможны фазовые рассогласования этих двух колебательных процессов.Таким образом, динамически управляя коэффициентом К, осуществляется динамическое изменение параметров вибродвигателя с прямыми ударами, к139709 которым относятся средняя скоростьпозиционирования, разрешающая способность, быстродействие, взаимовлияние координат и т.д., различных приразных степенях устойчивости виброударного процесса ударной пары, т.е.получаем возможность динамическогоуправления параметрами этих вибро"двигателей, переводя их из одного ре Ожима движения в другой.Устройство позиционирования, реализующее предлагаемый способ управ"ления параметрами вибродвигателя спрямыми ударами (фиг.3 и 4) представ-.15ляет собой основание 3, на которомсвободно расположен столик 4, к станкам выемки которого упруго поджатыпружиной 5 два пьезокерамическихпреобразователя 6 и 7. Электроды каж Одого преобразователя разделены на трипродольные эоны 8 и 9. Центральнаяэона 8 подключена напрямую к генератору 10 высокочастотных колебаний счастотой Г а две другие зоны 9 подключены к нему через умножитель 11частоты и усилитель 12, Кратностьумножения частоты и = 210,Устройство работает следующим образом. 30При подаче напряжения генератора10 на центральную зону 8 электродапьезопреобразователя 7 последний начинает совершать резонансные продольные колебания, а в зоне соударениясо.стенкой столика 4 возникают однонаправленные ударные импульсы силы,величина которых определяется восстановленным ударным импульсом, зависящим от коэффициента восстановления 4 Оудара К, (фиг.1). Режим работы вибродвигателя зависит от стабильностивиброударного процесса, которая определяется коэффициентом восстановления удара, и в этом случае для данного режима параметры вибродвигателя(средняя скорость, разрешающая способность и т.д.) имеют свои определенные значения.При дополнительной подаче напря 5 Ожения через умножитель 11 частотыи усилитель 12 на две крайние зоныэлектрода в пьезопреобразователе воз 04буждаются дополнительные изгибные колебания частотой Г = пГ , которые накладываются на зону соударений и уменьшают коэффициент К, до величины В (фиг.1), вызывая тем самым уменьшение восстановленного импульса и, как следствие, изменение режима работы вибродвигателя. В этом случае режим работы вибродвигателя характеризуется другими величинами присущих ему параметров средняя скорость позиционирования уменьшается, разрешающая способность повышается а взаимовлияние координат при многокоординатном позици-" онировании повышается), Такой перевод вибродвигателя из одного режима в другой осуществляется динамически, что позволяет применять предлагаемый способ для динамического управления параметрами вибродвигателя в различных прецизионных, устройствах, напри" мер в позиционирующих столах субмикронной. фотолитографии для достижения оптимальных величин параметров при выполнении отличных по предъявляемым к ним требованиям технологических операций (например, скоростное позиционирование, высокоточное выставление и т.д.), к которым предъявляются одновременные требования по быстродействию и точности. Формула из обретенияСпособ управления параметрами вибродвигателя с прямыми ударами, включающий возбуждение вибродвигателя и изменение коэффициента восстановления скорости удара путем подбора характе . ристик соударяемых элементов, о т л ич а ю щ и й с я тем, что, с целью обеспечения динамического управления параметрами вибродвигателя, после подбора характеристик соударяемых элементов в момент соударения в зоне соударения ударяющему элементу сообщают дополнительные колебания в плоскости, нормальной к плоскости ударных колебаний, при этом частота дополнительных колебаний выбирается из условия Г = пГ , где Г - частота ударных колебаний, п = 2 10.1397090 Составитель В.КудрявцТехред Л.Олийнык ктор И.Булл Корректор И.Эрдейи каз 2547/6 Тираж 443 ВНИИПИ Государственного по делам изобретений 113035, Москва, Ж, Раушодписное митета СССРткрытий 4 кая наб.,оектная, 4 Производс нно-полиграфическое предприятие, г. Ужгоро
СмотретьЗаявка
3918139, 25.06.1985
КАУНАССКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. АНТАНАСА СНЕЧКУСА
АЛЕКСЕЕНКО ВЯЧЕСЛАВ ИВАНОВИЧ, БАНСЯВИЧЮС РАМУТИС ЮОЗОВИЧ, РАГУЛЬСКИС КАЗИМЕРАС МИКОЛОВИЧ
МПК / Метки
МПК: B06B 1/06
Метки: вибродвигателя, параметрами, прямыми, ударами
Опубликовано: 23.05.1988
Код ссылки
<a href="https://patents.su/4-1397090-sposob-upravleniya-parametrami-vibrodvigatelya-s-pryamymi-udarami.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления параметрами вибродвигателя с прямыми ударами</a>
Квантовый усилитель (генератор) свч колебаний на твердом теле

Номер патента: 137590
Опубликовано: 01.01.1961
Автор: Житников
МПК: H01S 1/00
Метки: генератор, квантовый, колебаний, свч, твердом, теле, усилитель
...внешнему магнитному полю.Из чертежа видно, что изменением магнитного поля можно легко перестраивать рабочую частоту , причем значение вспомогательной частоты ч" изменяется при этом сравнительно мало. В системе уровней, представленной на чертеже, возможен выбор и других троек рабо137590 Предмет изобретения Квантовый усилитель (генератор) электромагнитных колебаний, отл ич а ю щи йс я тем, что, с целью увеличения ширины полосы, диапазона перестройки, диапазона рабочих частот, повышения рабочих температур и увеличения стабильности стандартов частоты, в нем Используются переходы между энергетическими уровнями (тонкой или сверхтонкой структуры) нейтральных парамагнитных атомов, вкрапленнь 1 х в химически пассивные диамагнитные вещества или...
Способ определения коэффициента восстановления материала при ударе

Номер патента: 1193513
Опубликовано: 23.11.1985
МПК: G01N 3/30
Метки: восстановления, коэффициента, ударе
...именно к способам определения коэффициента восстановления материала при ударе, и можетбыть использовано для определениякоэффициента восстановления при высоких скоростях соударения при использовании бойков маль 1 х размеров.Целью изобретения является повышение точности.На фиг. показана схема установки,реализующей способ; на фиг,2 - ударная лунка на поверхности пластины,разрез; на фиг.3 - градуировочныекривые для определения скорости отскока бойков различной массы в зависимости от диаметра лунки на пластине-эталоне.Способ, осуществляют следующим об-.,,разом,Исследуемый образец 1 устанавливают на рычаге 2 и приводят рычаг 2с образцом 1 в движение по круговойтраектории радиуса К относительнооси 3 с известной угловой скоростью,Первоначально...
Способ определения параметров волновых колебаний в твердом теле с токопроводящей поверхностью

Номер патента: 1449843
Опубликовано: 07.01.1989
Авторы: Андрюшкявичюс, Рагульскис
МПК: G01B 17/00, G01H 11/06
Метки: волновых, колебаний, параметров, поверхностью, твердом, теле, токопроводящей
...Заказ 6957/41 Тираж 680 ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Иосква, Ж, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4 Изобретение относится к измеригельной технике и может быть применено для исследования распространенияакустических колебаний в твердых те 5Пах еЦелью изобретения является повы 1 пение чувствительности определенияпараметров волновых колебаний.На чертеже представлена схема устройства для реализации способа.Устройство включает алюминиевыйобразец 1 с анодированной поверхностью, измерительный электрод 2 иглообразной формы, закрепленный на пьезокерамическом биморфном. преобразователе 3, Пьезокерамический...
Способ многоканального преобразования информации о колебаниях измеряемых параметров циклически действующего объекта в текущем масштабе времени (его варианты) и устройство для его осуществления (его варианты)

Номер патента: 2003986
Опубликовано: 30.11.1993
Авторы: Клобуков, Ковалев, Куликов, Куприянов, Петров, Тихомиров
МПК: G01R 23/00
Метки: варианты, времени, действующего, его, измеряемых, информации, колебаниях, масштабе, многоканального, объекта, параметров, преобразования, текущем, циклически
...диагностики и аварийной защиты роторных машин. Для этих же целей используются другие устройства (см. например, международная заявка М 86-04137, кл, 6 01 Н 1/00; апублик. 17.07.86 заявка Японии М.1-1306032,кл. 6 01 Н 11/00,17/00,опублик, 29,05.89, заявка Великобритании "ч.2225125, кл, О 05 В 15/02, кл, б 3 К, опублик, 23.05.90 и др,).В справочнике под общей редакцией Клюева В,Б. Технические средства диагностирования, - Ы.: Машиностроение, 1989, с, 672, приведены и систематизированы многочисленные примеры, реализующие способы и устройства преобразования информации а колебаниях циклически действующих объектов в текущем масштабе времени применительна к электрарадиоэлектроннойаппаратуре, устройствам вычислительной техники и систем...
Преобразователь параметров трансформаторных датчиков в период электрических колебаний
Номер патента: 1033985
Опубликовано: 07.08.1983
Авторы: Алексеев, Зябиров, Мартяшин, Чернецов
МПК: G01R 27/02
Метки: датчиков, колебаний, параметров, период, трансформаторных, электрических
...ограниченные функциональные возможности, заключающиеся в невозможности преобразования постоянной времени обмоток датчи" ка : Ьх. в частотныйсигнал.Цель изобретения - повышение точности и расширение функциональных возможностей преобразователя параметров трансформаторных датчиков в частотные сигналы.Поставленная цель достигается тем, что в преобразователь, содержащий сумматор, диффернциатор, переключатель, блок сравнения и интегратор, вход которого подключен к выходу блока сравнения, выход трансформаторно" го датчика подключен к первому входу переключателя, а клемма соединения первичной и вторичной обмоток датчика подключена к корпусу, введены вто-. рой переключатель, два управляемыхделителя напряжения и преобразователь напряжения в ток,...
Предыдущий патент: Антенна акустического локатора
Следующий патент: Вибровозбудитель
Случайный патент: Устройство для создания противодавления в закрытых штампах