Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
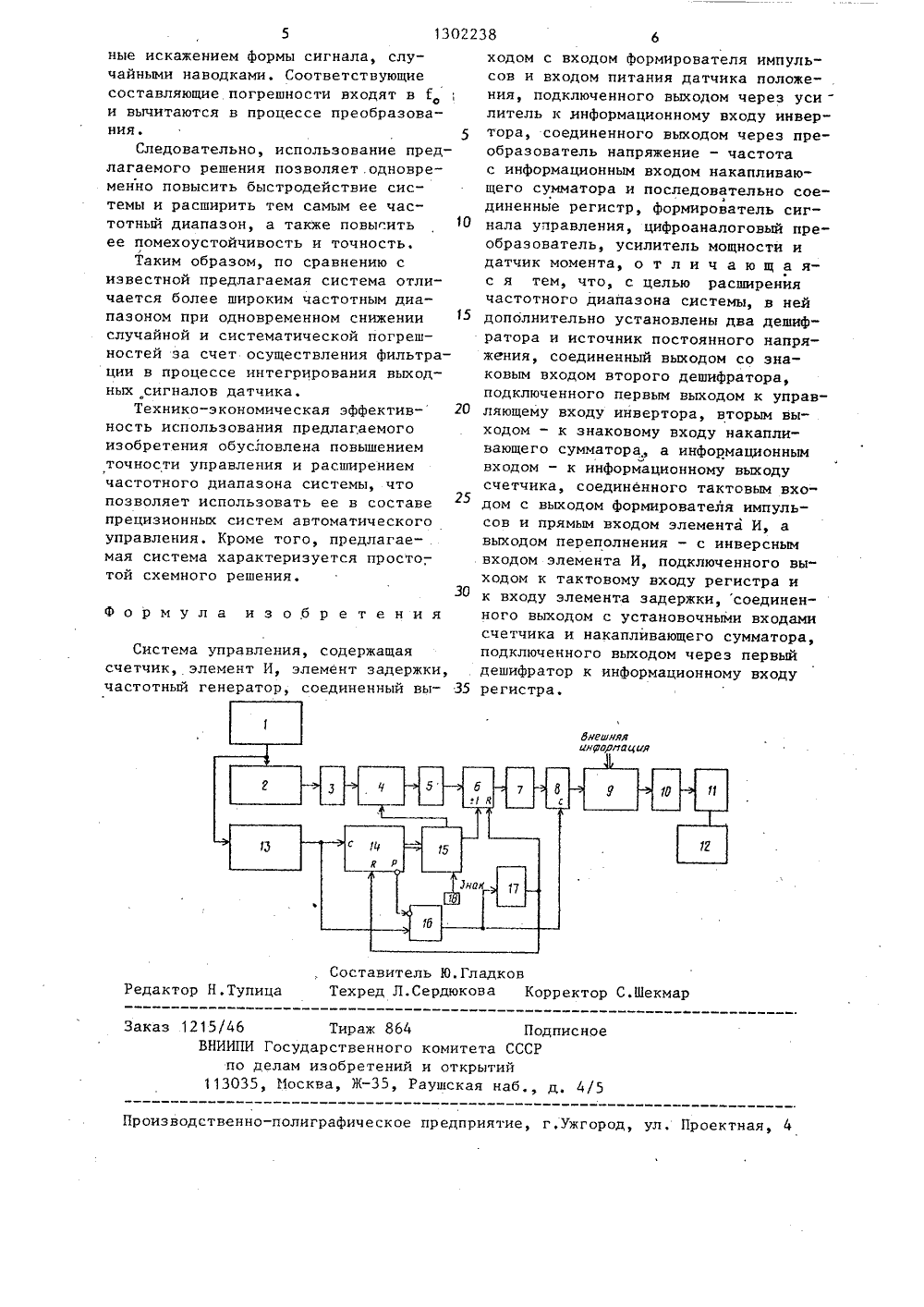
(19) (И) 4 С 05 В 11/01 ВЕННЫЙ КОМИТЕТ СССРИЗОБРЕТЕНИЙ И ОТНРЫТИИ ГОСУДА ПО ДЕЛ ОПИСАНИЕ ИЗОБРЕТЕНИЯ А ВТОРСКОМУ СВИДЕТЕЛЬСТВУ ч ледовательно инвертор, пр ние - частот тор, первый соединенные усилит образователь напряжнакапливающий су ешифратор и регист вход формирователя ия, выходной сигна апоступает н ала управлеоторого чербразовательодается на ез налоговыи си итель мощнос тчика момент ходал ф Выходнои сиг пульсов пост счетчика и и рмирователя и на тактовый в ает мой одИ,пает ход элемен ный вход которого пост выхода переполнения сч а инве тчитТЕМА УПРАВЛЕНИЯбретение относится к гирокой технике и может найти) Из пиче чика поступа сшиг пера уп- вто- накап- сигнал вход второго деш вый выходной сиг равляющий вход и рой сигнал - на ливающего суммат ратора, егол подаетсяертора, егоаковый входа. Выходной применение при управлени илизированными платформ обретения является расши ко ста ью з ие ча отного диапазона системы.ая цель достигается зачто выходной сигнал часставлен ет того лемента И подает егистра и на вхо я на тактовый вх емента адержки.ржки ератора подается на входля импульсов и вход пиотного г ормирова Выходнои сигналпоступает на устчика и сумматора емента овочные вх1 табл.,ы счет тания да ика положения. Выходнои ил(56) Гироскопические системы./Под ред. Д.С.Лельпора. М.: Высшая школа, 1977, ч.1, с. 22-23.Авторское свидетельство СССР В 1260913, кл. С 05 В 11/01, 1984.Авторское свидетельство СССР У 1130830, кл. С 05 В 13/02, 1983. игнал датчика положения через пос130Изобретение относится к гироскопической технике и может найти широкое применение при управлениигиростабилизированными платформами.Цель изобретения в . расширениечастотного диапазона системы.На чертеже представлена блок-схема системы,Система управления содержит частотный генератор 1, датчик 2 положения, усилитель 3, инвертор 4, преобразователь 5 напряжение - частота,накапливающий сумматор б,первый дешифратор 7, регистр 8, формирователь9 сигнала управления, цифроаналого"вый преобразователь 10, усилитель11 мощности, датчик 12 момента, формирователь 13 импульсов, счетчик 14,второй дешифратор 15, элемент И 16,элемент 17 задержки, источник 18 постоянного напряжения.В качестве датчика 2 положенияможет быть использован как амплитудный, так и фазовый датчик положенияугла, например ВТ.Накапливающий сумматор 6 можетбыть выполнен в виде реверсивногодвоичного счетчика. Дешифраторы 7и 15 проектируются по стандартнойметодике синтеза цифровых автоматов и заданной таблицы истинности.формирователь 9 сигнала управления может быть выполнен так же, какв известной системе. В частном случае это может быть накапливающий сумматор или блок умножения в зависимости от алгоритма выработки управляющего сигнала, Например, если управляющий сигнал., подаваемый на датчик12 момента, должен представлять со-,бой сумму сигнала внешней информации, поступающего на второй входформирователя 9 сигнала управления,и масштабированного выходного сигнала датчика 2 положения, формирователь 9 сигнала управления выполняется в виде последовательно сЬединенных блока умножения и сумматора,причем на первый вход блока умножения подается выходной,код регистра 8,а на второй его вход - код масштабирующего коэффициента, например спульта, на второй вход сумматорапоступает сигнал внешней информации.Формирователь 13 импульсов можетбыть выполнен в виде последовательно соединенных компаратора (детектора опорного уровня) или детектора2238 нулевого уровня и собственно формирователя, который в свою очередьможет быть выполнен в виде последовательно соединенных дифференциатораи выпрямителя (К-С цепочка и диод),в результате чего импульс на выходеформирователя 13 импульсов появляется каждый раз, когда его входноенапряжение достигает заданного уровня, в частности нуля,Элемент 17 задержки может бытьвыполнен в виде четного числа последовательно соединенных инверторов,Его время задержки должно быть меньше минимального периода выходныхимпульсов преобразователя 5 напряжение - частота, но больше времени,необходимого для перезаписи кода врегистр 8,Примером таблицы истинности дешифратора 15 может служить следующая таблица,Вход- Первый,вы- Второй выной ходной сиг- ходной сиг н л на 1 (+ 0 (0000 1000 0100 1100 0000 35 О Дешифратор 7 выполняется на базе стандартного посгоянного запоминающего устройства (ПЗУ), реализующего функцию, обратную той, которая реализуется датчиком2 положения совместно с накапливающим сумматором 6. Так,например, если амплитуда переменного выходного напряжения датчика 2 положения пропорциональна углу поворота чувствительного элемента, первый дешифратор 7 передает на выход прямой код. Если амплитуда выходного сигнала датчика 2 положения пропорциональна синусу указанного угла, первый дешифратор 7 реализует функцию арксинус, Если информация о положении чувствительного элемента заключается в фазе выходного сигнала датчика 2 положения, дешифратор выполняет функцию арккосинус.Счетчик 14 в приведенном выше примере выполняется двухразрядным,Система управления работает следующим образом.Выходной сигнал датчика 2 положения после усиления в усилителе 3 преобразуется в частоту с помощью преобразователя 5 напряжение - частота, который формирует частоту Й если напряжение на его входе рав но нулю, частоту й + аГ при положительном напряжении на входе и Е - М - при отрицательном. Эта частота накапливается в накапливаю - щем сумматоре 6 в течение фиксироф ванного числа полупериодов выходного напряжения частотного генератора 1, отсчет которых производится счетчиком 14 по сигналу формирователя 13 импульсов. 20В рассмотренном примере выполнения второго дешифратора 15 это число равно 2, при этом в течение обоих полупериодов на вход преобразователя 5 напряжение - частота подается положительное напряжение, что достигается включением инвертора 41 на входе преобразователя 5 напряжение - частота, сдвиг фаз между выходным сигналом частотного генератора 1 и, выходным сигналом датчика 2а положения не превышает 180 . Если сдвиг фаз больше, то на знаковый вход второго дешифратора 15 подается выходной сигнал источника постоянного напряжения и на его первом выходе сигналы инвертируются.1В результате к концу указанного четного числа полупериодов в накап ливающем сумматоре 6 накапливается величина, пропорциональная сумме Г и амплитуды или фазы выходного сигнала датчика 2 положения. После этого знак сигнала на первом выходе второго дешифратора 15 меняется на противоположный и в течение последующих полупериодов, число которых равно первоначальному, из накопленного значения вычитается величина, пропорциональная Е, Например, накопление величины Г + 6 Й может производиться в течение двух полупериодов и вычитание величины также в течение двух полупериодов. При этом в течение последнего полупериода на выходе йереполнения счетчика 14 присутствует логическая единица.Для того, чтобы значение выходного кода Поскольку выходной сигнал датчика 2 положения поступает на последовательно соединенные преобразователь 5 напряжение - частота и накапливающий сумматор 6, осуществляющие его интегрирование, исключаются составляющие погрешности, обусловлен1302238 15 Составитель Ю.ГладковТехред Л.Сердюкова Корректс Н.Ту а екм 15/46 Тира ВНИИПИ Государстве по делам изобре 113035, Иосква, Ж64 Зака сно Подтета СССР нного котений и-35, Рауш открытииская наб., д оизводственно-полиграфическое предприятие, г,ужго 4 Проект ные искажением формы сигнала, случайными наводками. Соответствующие составляющие погрешности входят в Г и вычитаются в процессе преобразования. 5Следовательно, использование предлагаемого решения позволяет одновременно повысить быстродействие системы и расширить тем самым ее частотный диапазон, а также повысить ее помехоустойчивость и точность.Таким образом, по сравнению с известной предлагаемая система отличается более широким частотным диапазоном при одновременном снижении случайной и систематической погрешностей за счет осуществления фильтрации в процессе интегрирования выходных сигналов датчика.Технико-экономическая эффектив ность использования предлагаемого изобретения обусловлена повышением точности управления и расширением частотного диапазона системы, что позволяет использовать ее в составе прецизионных систем автоматического управления. Кроме того, предлагае- .мая система характеризуется просто-, той схемного решения.30 Формула изобретения Система управления, содержащаясчетчик, элемент И, элемент задержки,частотный генератор, соединенный вы ходом с входом формирователя импульсов и входом питания датчика положения, подключенного выходом через уси литель к информационному входу инвертора, соединенного выходом через преобразователь напряжение - частота с информационным входом накапливающего сумматора и последовательно соединенные регистр, формирователь сигнала управления, цифроаналоговый преобразователь, усилитель мощности и датчик момента, о т л и ч а ю щ а яс я тем, что, с целью расширения частотного диапазона системы, в ней дополнительно установлены два дешифратора и источник постоянного напряжения, соединенный выходом со знаковым входом второго дешифратора, подключенного первым выходом к управляющему входу инвертора, вторым выходом - к знаковому входу накапливающего сумматора, а информационным входом - к информационному выходу счетчика, соединенного тактовым входом с выходом формирователя импульсов и прямым входом элемента И, а выходом переполнения - с инверсным входом элемента И, подключенного выходом к тактовому входу регистра и к входу элемента задержки, соединенного выходом с установочными входами счетчика и накапливающего сумматора, подключенного выходом через первый дешифратор к информационному входурегистра.
СмотретьЗаявка
3873788, 27.03.1985
ПРЕДПРИЯТИЕ ПЯ В-8618
АЛЬТШУЛЕР ВИКТОР СЕРГЕЕВИЧ, ВАСЮХНО АНАТОЛИЙ АЛЕКСЕЕВИЧ, ВОЛКОВ ЛЕВ НИКОЛАЕВИЧ, ВОЛНЯНСКИЙ ВЛАДИМИР НИКОЛАЕВИЧ, ОРЛОВ АНДРЕЙ ВАЛЕНТИНОВИЧ, ФИЛАТОВ ВИКТОР МИТРОФАНОВИЧ
МПК / Метки
МПК: G05B 11/01
Метки:
Опубликовано: 07.04.1987
Код ссылки
<a href="https://patents.su/4-1302238-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Преобразователь частоты сигнала в напряжение

Номер патента: 705364
Опубликовано: 25.12.1979
МПК: G01R 23/02
Метки: напряжение, сигнала, частоты
...оваКор Н. Задерновская Редактор Т. Зубковт а тттттттЗаказ 8021/48ЦНИИПИ ехредаееате73ого комиий и откРаушская Тираж 1 Государствен лам йзобрете осква, Ж,Подпета СССРилий:.наб., д. н/5 3035 Ул. Проектяая,Ужгород аФ Йй ., . льгаическом элемейте И 2 преобразуется в прямоугольные импульсы, длителность которых равна времени совпадения напряжений по фазе. Прямоугольные импульсы с выхода элемента 2 йодаютсяна интегрирующий элемент 4, расширитель импульсов 9 и логический элемент ЙЕ 8.Далее происходит преобразоваяие длйтельности- импуальсов в амплитуду постоянного напряжения. укаэанные им- о пульсы управляют интегрирующим элементом 4. В момент й появления импульса начинается заряд интегрирующего элемента. В момент 1 исчезновения импульса заряд...
Цифровое устройство для измерения частоты сигнала

Номер патента: 875292
Опубликовано: 23.10.1981
Автор: Малыкин
МПК: G01R 23/00
Метки: сигнала, цифровое, частоты
...моменты времени сМ (с = 0,1,2). Интервал дискретизации Д, выбираемый из условия дискретизации узкополосных Сигналов, равенн , где Д Р - полоса пропускания полосового фильтра 2, В моменты времени Мс в генераторах 4 и 5 формируются аргументы У = 27 С(Фо-ЬУ)1 М и Ч=: йЛо+М)М, где о2ожидаемое значение частоты сигнала, й- ширина частотного дискриминатора. В преобразователях 6 и 8 формируются дискретные значения функций соз Ч.4 и 51 п%, а во вторых преобразователях (созг) и (51 пт) 7 и 9 формируются дискретные значения функций созе 51 п 3, которые поступают на умно- жители 10, 11, 12 и 13 соответственно, где перемножаются с кодами выборок сигнала Й(М). Пройзведения поступают на накопители 14, 15, 16 и 17, на выходах которых соответственно...
Преобразователь сигнала датчика перемещения в частоту

Номер патента: 1550619
Опубликовано: 15.03.1990
Автор: Латышев
Метки: датчика, перемещения, сигнала, частоту
...2. Гармонический сигнал с выхода усилителя 2 преобразуется в постоянное напряжение преобразователем 3, которое поступает на вход аналогоцифрового преобразователя 5. Двоичный код аналого-цифрового преобразо 35 вателя 5, пропорциональный величине напряжения первой гармоники входного сигнала, управляет двоичным умножителем 6, на частотный вход которого поступают импульсы опорной частоты от генератора 7 импульсоЪ. Выходнойсигнал двоичного умножителя б, поступающий на выход 9, пропорционален напряжению первой гармоники сигнала 45 датчика перемещения, С помощью фазового детектора 4 формируется сигнал направления перемещения на выходе 10.Выходной сигнал 4 датчика переме 50 щений индуктивного типа, например вращающегося трансформатора,...
Преобразователь частоты синусоидального сигнала в напряжение

Номер патента: 599229
Опубликовано: 25.03.1978
Авторы: Апанасенко, Буркин, Дзюбенко
МПК: G01R 23/06
Метки: напряжение, сигнала, синусоидального, частоты
...1. Далее синусоидальныйсигнал поступает на источник опорногонапряжения 2 и фомирователь " прямоугольных импульсов 11. В источнике опорногонапряжения синусоидальный сигнал выпрямляется, затем сглаживается и стабилизируется с помощью резисторов 5 и би стабилитронов 9 и 10Это стабилизированное напряжение служит для питанияФормирователя прямоугольных импульсови прикладывается к эмиттерно-коллекторНому переходу транзисторов, 12 и 13. СиИусоидальный сигнал с изменяющейся амплитудой преобразуется в последовательность прямоугольных разнополярных иЪпульсов с постоянной амплитудой той жечастоты, При этом с трансформатора 1,через резисторы 30 и 31 подается отпирающий сигнал синусоидального напряжения на базы транзисторов 12 и 13, При...
Формирователь сигнала датчика частоты вращения

Номер патента: 1327282
Опубликовано: 30.07.1987
МПК: G11B 15/46, H03K 5/153
Метки: вращения, датчика, сигнала, формирователь, частоты
...шиной 3,а выходом Аормирователя являются вы.ходы КБ-триггера 4,Формирователь работает следующимобразом.Сигнал с датчика частоты вращения(не показан) через усилитель или непосредственно поступает на сигнальную шину 3 (Лиг,2 диаграмма 10), навремя превышения которым уровня верхнего порога на выходе элемента 1 шормируется отрицательный импульс (Фиг,2" диаграмма 11). Аналогичный импульсформируется на выходе элемента 2 вовремя превышения по абсолютной величине нижнего порога (Лиг,2 диаграмма 12), Пороговый элемент 8 переключается при пересечении входным сигналом нулевого уровня (йиг,2 диаграмма13). Отрицательный перегад напряже 27282 2ния с порогового элемента 1 переключает триггер 7 по входу Б, а по входу К триггер 7 управляется...