Способ определения пространственных кинематических параметров суставов в эксперименте
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
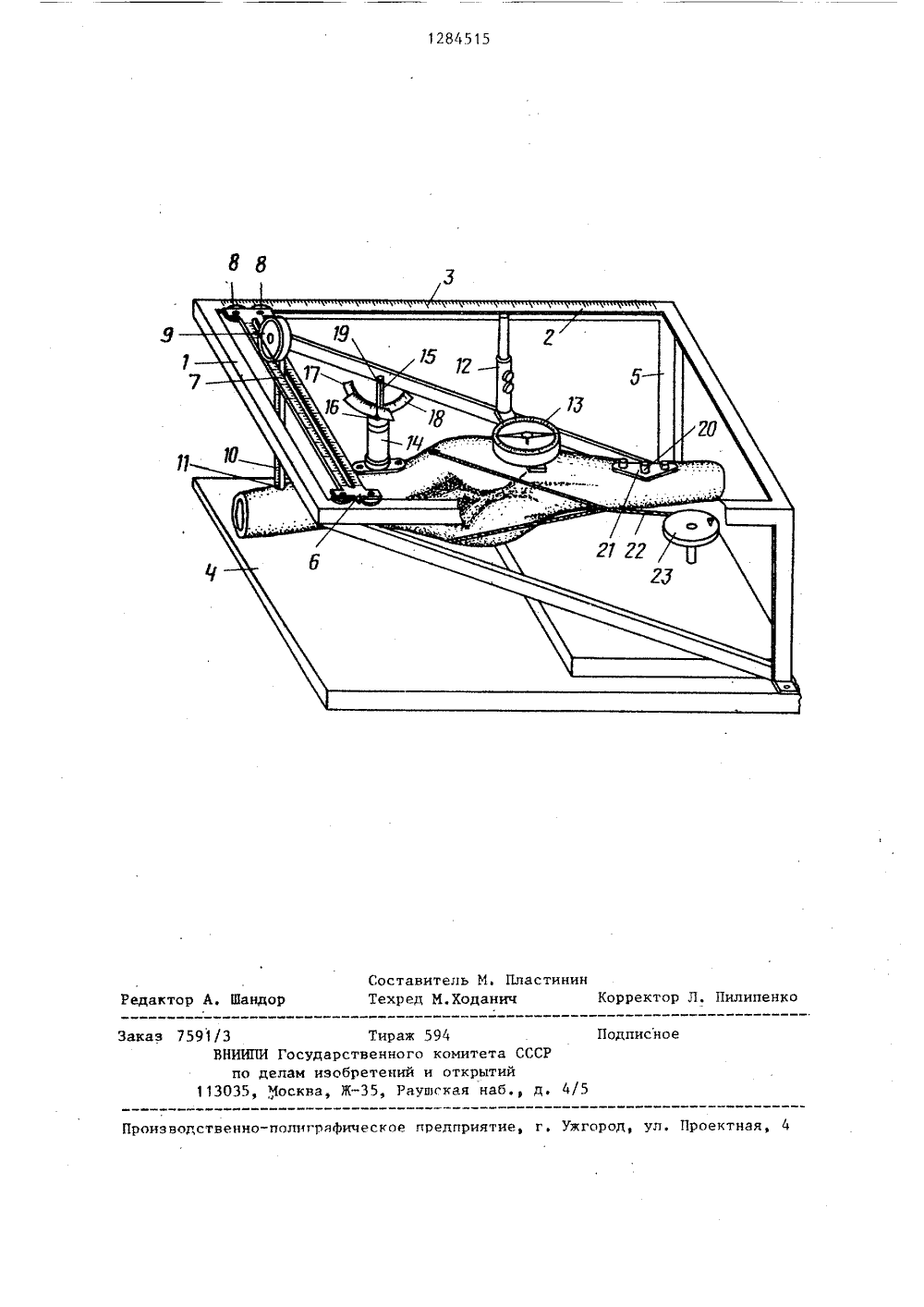
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИК 4 А 61 В 5/10 Г 71,т ПИСАНИЕ ИЗОБРЕТЕНИЯАВТОРСКОМУ СВИДЕТЕЛЬСТВУ и и хова биос. 28РАН- АМЕТРОВ метода раметперпеню выяв ОСУДАРСТНЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(54) СПОСОБ ОПРЕДЕЛЕНИЯ ПРОССТВЕННЫХ КИНЕМАТИЧЕСКИХ ПАРСУСТАВОВ В ЭКСПЕРИМЕНТЕ(57) Изобретение относится копределения кинематических иров в суставе в трех взаимнодикулярных плоскостях. С цел 801284515 ления кинематической патологии фиксируют один из сегментов анатомического препарата сустава человека с сохранением капсулы и связок, размещают над ним и на подвижном сегментеизмерительные устройства, выполненные в виде компаса, постоянного магнита и опоры с угловыми шкалами и отвесом, дискретно изменяют положениеподвижного сегмента сустава в основной плоскости перемещения. Вычисляют координаты мгновенной оси .движения Сустава и ее углы наклона к сагиттальной, Фронтальной и трансверсальной плоскостям, что обеспечиваетточность измерения пространственныхугловых и линейных характеристик суставов. 1 ил.15 2сируют винтом гибкую тягу 22, перекидынаемую через блок 23, На этомже суставном конце с помощью винтовзакрепляют постоянный магнит 14, накоторый устанавливают опору 15 с угловыми шкалами 17 и 18 и отвесом 19Перед измерениеМ угловую шкалукомпаса 13 устанавливают в нулевоеположение, а угловые шкалы 17 и 18 -строго по отвесу 19По шкалам 3,7и 10 регистрируют начальное положениецентра головки винта 11,Перемещение сегмента на заданныйугол сгибания осуществляется посредством гибкой тяги 22, при этом магнит14 с установленной на нем опорой 15,двигаясь относительно неподвижногосуставного конца, приводит в движениемагнитную стрелку компаса 13, отклоняя ее на заданный угол сгибания,при этом угловые шкалы 17 и 18 отклонятся от вертикальной оси отвеса 19,шкала 10 сместится относительно шкал3 и 7 и одновременно изменится еедлина под действием пружины, вмонтированной в каретку 9.Перемещение сегмента проводят дискретно, разбивая полный угол сгиба 12845 головкой 11 и установлен перпендику лярно плоскости 4, при этом одна из сторон прямоугольной рамы 1 жестко связана с кронштейном 12, поддерживающим измерительное устройство в виде компаса 13, ориентированного плоскостью параллельно плоскости 4, в состав измерительного устройства 13 входит постоянный магнит 14, опора 15, связанная через шаровой шарнир 16 с угловыми шкалами 17 и 18, ориентированными под прямым углом друг к другу, и отвесом 19, фиксированным в верхней части опоры 15, что дает возможность регистрировать численные значения кинематических параметров 40сустава.Анатомический препарат сустава человека, освобожденный от мягких тканей с сохранением капсулы и связок, устанавливают на плоскость 4 так, чтобы основная плоскость движения подвижного сегмента была параллельна этой плоскости, а наиболее выступающая точка костного выступа вблизи суставной щели неподвижного суставного конца совпадала бы с осью магнитной стрелки компаса 13, после чего сегмент фиксируют к плоскости 4 гвоздями Гоффмана 20, проведенными через пластину 21, На подвижном суставном конце с помощью винта 11 закрепляют свободный конец тарированной шкалы 10, а в месте анатомического крепления мьшщ-сгибателей фикКоординаты точки (1 У , Е,), черезкоторую проходит ось мгновенного перемещения сустава, для 1-го интервала определяют, решая систему линей ных уравнений:(3) Изобретение относится к медицине, а именно к методам определения кинематических параметров в суставе в трех взаимно перпендикулярных плоскостях, 5Целью изобретения является выявление кинематической патологии суставов.Способ осуществляется посредством разработанного устройства.На чертеже изображено устройство для осуществления способа.Устройство имеет прямоугольную раму 1 с направляющими 2 и тарированной шкалой 3, фиксированнук 1 к пло 15 скости 4 посредством стоек 5 с установленной в ее плоскости подвижной планкой 6 со шкалой 7 и роликами 8, причем в сквозном пазу планки Ь установлена подвижно каретка 9, снабженная подпружиненной тарированной шкалой 10, свободный конец которой заканчивается винтом со сферической ния сустава на несколько интервалов (1 интервалов), например по 10 илио15 или 20 , Регистрацию линейных и угловых параметров проводят в начальном положении подвижного сегмента, а затем в конце каждого интервала сгибяния. Линейные координаты("у;,Е;) одной из точек подвижного сегмента (головки винта 11) регистрируют соответственно по шкалам10,7 и 3 (фиг.1). Угловые координатысегмента, к которым относятся уголсгибания ;, угол ротации у , .уголприведения - отведения 9 отсчитывают соответственно по шкалам 13, 17и 18.15жения сустава к оси Х, оси У и оси2 в д-том интервале сгибания определяют по формулам:1У 2; -У,2;Ы, =агссоя -- - -х 4Х, Е;-Х;2;Я = ф агссов-- - -- ,К,20 К.= (д"Е -д; 2,)+(Х;Е;-Х;Е;)+(Хд;-Х;д",) Преимуществом способа определения пространственных кинематических параметров суставов в эксперименте является точность измерения пространственных угловых и линейных характеристик с учетом физиологического наклона 35 мгновенной оси движения сустава и одновременного пространственного ее перемещения в сагиттальной, фронтальной, трансверсальной плоскостях.40 Формула из обретения Способ определения пространственных кинематических параметров суставов в эксперименте путем укрепления 45 на конечности датчика углового переА, = -соя 6, ядпУ совц,++ со я 6. я дп д., ,А, = -ядпуАц = -соя; ядп(А = совсоя(где ц;, ;, 6 определяют из соотношений: в которых(р Д;О;, - значения углов в конце (д)-го интервала сгибания, ц;,у;,В, - значения углов в конце д-го интервала сгибанияКоэффициенты Е Е, Еэ в уравнениях (1), (2).и (3) определяют по формулам: Х У;, , Е;., - значения координат головки винта 11 в конце (д)-гоинтервала сгибания Х У , 7.; - координаты головки винта 11 в концед-го интервала сгибания. Углы наклона мгновенной оси двиХ У, -Н;д"И = +агссояг 1 -В. мещения с размещением оси вращения шарнира датчика против мнимой оси вращения сустава, о т л и ч а ю щ и йс я тем, что, с целью выявления кинематической патологии суставов, фиксируют один из сегментов, размещают над мыщелком неподвижного сегмента измерительное устройство в виде компаса, а на подвижном укрепляют постоянный магнит и опору с угловыми шкалами и отвесом, дискретно изменя" ют положение подвижного сегмента сустава в основной плоскости перемещения, вычисляют координаты мгновенной оси движения сустава и ее углы.наклона к сагиттальной, фронтальной и трансверсальной плоскостям.1284515 Составитель М. ПластининТехред Х.Ходанич Корректор Л. Пилипенко Редактор А, Шандор Подписное Заказ 7591/3 Тираж 594ВНИИПИ Государственного комитета СССРпо делам изобретений и открытий113035, Чосква, Ж, Раушская наб., д. 4/5 Производственно-полигрлфическое предприятие, г. Ужгород, ул. Проектная 4
СмотретьЗаявка
3694749, 13.01.1984
ЦЕНТРАЛЬНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ ТРАВМАТОЛОГИИ И ОРТОПЕДИИ ИМ. Н. Н. ПРИОРОВА
ОГАНЕСЯН ОГАНЕС ВАРДАНОВИЧ, ТЕРЕХОВА НАТАЛЬЯ ВИКТОРОВНА, ПЬЯНОВ НИКОЛАЙ ИВАНОВИЧ
МПК / Метки
МПК: A61B 5/10
Метки: кинематических, параметров, пространственных, суставов, эксперименте
Опубликовано: 23.01.1987
Код ссылки
<a href="https://patents.su/4-1284515-sposob-opredeleniya-prostranstvennykh-kinematicheskikh-parametrov-sustavov-v-ehksperimente.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения пространственных кинематических параметров суставов в эксперименте</a>
Способ балластировки трубопровода с произвольным очертанием оси в горизонтальной плоскости на болоте

Номер патента: 1820131
Опубликовано: 07.06.1993
Авторы: Богушевская, Димов, Сумароков
МПК: F16L 1/028
Метки: балластировки, болоте, горизонтальной, оси, очертанием, плоскости, произвольным, трубопровода
...перепад 58 С и показана на 10 рисунке. Как следует из расчета, есть два участка с максимальной величиной поперечных перемещений в противоположные от оси трубы стороны: первый - с центром в точке 8 (Оз=б 1 см), слева и справа от точки 8 15 величина перемещений уменьшается до нуля в точке 11 и за пределами точки 1. Второй с центром в точке 19 (О 1 э=81 см), для которого перемещения равны нулю в точке 11 и на другой половине компенсатора за преде лами оси симметрии, На обоих этих участках балластировку следует производить с переменным шагом, нарастающим от точек 8 и 19 слева и справа от них до сечений, где О=О. Величину Р - расчетное сопротивле ние основания поперечному перемещению трубы по.горизонтали вычисляют из равенства:=0,31...
Способ замещения обширных дефектов суставных концов костей коленного сустава

Номер патента: 1120970
Опубликовано: 30.10.1984
Автор: Маракуша
МПК: A61B 17/00
Метки: дефектов, замещения, коленного, концов, костей, обширных, сустава, суставных
...из заднего отдела надколенника путем расщепления последнего нз две половины.Хрящевой компонент костно-хряшевого аутотрансплантата замешает хрящ, отсутствующий на мышелке сустава, а костный компонент заполняет поверхностный отдел костного дефекта. Дефект в метафизе большеберцовой кости, образовавшийся после иссечения трансплантата, замешают костным аллотрансплантатом.При наличии рубцового перерождения капсулы сустава, препятствующего сгибанию в нем конечности, производят парапателлярный разрез фиброзного листка капсулы сустава с противоположной стороны, что увеличивает амплитуду движений в суставе. 1 осле гемостаза операционную рану зашивают с оставлением в полости сустава резинового дренажа на 24 ч.Пример 1, Больная Г., 24 лет,...
Аппарат для разработки движений в локтевом суставе при наличии контрактур

Номер патента: 337125
Опубликовано: 01.01.1972
Авторы: Ортопедии, Свердловский, Серебренников
МПК: A61B 17/56
Метки: аппарат, движений, контрактур, локтевом, наличии, разработки, суставе
...известных тем, что элементы регулировки и фиксации угла сгибания - разгибания сустава выполнены в виде винтовых тяг, шарнирно соединенных с упорами,на манжетах.На чертеже изображен описываемый аппарат, общий вид,Он содержит две съемные полуцилиндрические манжеты 1, шарнирно соединенные между собой при помощи стержней 2. На последних неподвижно укреплены упоры 3, в отверстиях которых свободно установлены цилиндрические оси 4, имеющие поперечные отверстия для прохождения винтовых тяг б. Тяги снабжены регул ировочными гайками б, расположенными попарно с обеих сторон цилиндрических осей 4. Для фиксациями на плече и предплечье манжеты имеют ремни 7,При наложении аппарата манжеты 1 жест ко фиксируются ремнями 7. Во время сгибания руки в...
Устройство для контроля неперпендикулярности оси изделия к плоскости

Номер патента: 783583
Опубликовано: 30.11.1980
Авторы: Нестеренко, Тимонин
МПК: G01B 13/18
Метки: изделия, неперпендикулярности, оси, плоскости
...Известыне устройства не дают возможностиконтролировать погруженные в жидкостьизделия, например ареометры,Цель изобретения - обеспечение возможностиконтроля погруженйого в жидкость изделия,например ареометра.Указанная цель достигается тем, что устройствоснабжено осесимметричным поплавком, охватывающим корпус соосно кольцам,На чертеже представлена принципиальная схемаустройства,Устройство для контроля неперпендикулярнос.ти оси изделия к плоскости содержит осесимметричный корпус 1 с поплавком 2, размещенныев корпусе на противоположных его кон- .цах съемные базирующее 3 и контроль.ные 4 кольца,Устройство и контролируемый ареометр 5 по- . мещают в сосуд 6 с водой таким образом, чтобы ареометр свободно плавал, а его стержень 7 находился...
Устройство для измерения отклонений от перпендикулярности оси отверстия относительно плоскости

Номер патента: 1411565
Опубликовано: 23.07.1988
Авторы: Кивитар, Лукичев, Шаулина
МПК: G01B 5/245
Метки: оси, отверстия, отклонений, относительно, перпендикулярности, плоскости
...оси отверстия относи 1 тельно плоскости содержит основание 1, на котором закреплена стойка 2. На стой 1 ке 2 установлены направляющие 3, по кото 1 рым имеет возможность перемещаться па 1 раллельно плоскости основания 1 каретка 4 с кинематически связанным с ней центрирующим элементом 5, имеющим с одной стороны конусную часть 6, а с другой - полусферическую часть 7, На отсчетном узле 8 закреплен измерительный наконечник 9, имеющий внутреннюю коническую поверхность 10, взаимодействующую со сферической поверхностью 7 центрирующего элемента 5. Конусная оправка 11 расположе 1 на в основании 1 перпендикулярно плоскос 1 ти 12. Также перпендикулярно плоскости 2 1 основания 1 закреплен в каретке 4 на 1 одной оси с измерительным...
Предыдущий патент: Устройство для испытания прочности стенок полых органов на разрыв
Следующий патент: Устройство для фиксации рентгеновской кассеты
Случайный патент: Способ трубопроводного транспорта высоковязких парафинистых нефтей