Датчик углового положения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1226038
Автор: Каржавов




Текст
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИН 1191 (11В 14 С 01 7 ПИСАНИЕ ИЗОБРЕТЕНИЯ ТОРСКОМУ ЕТЕЛЬСТВ.39:531.7 1 (088,8)ое свидетельство ССС 01 В 7/30, 1979 ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ(54) ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ (57) Изобретение позволяет повысить точность контроля углового положения вала за счет улучшения формы кривой выходного сигнала датчика. Датчик содержит 2 Р-полюсный ротор с постояннными магнитами и статор с отверстиями для размещения в них секций ь-фазной обмотки. Число отверстий2 Р ь" ь, где ь 2, 3. С увеличением числа пазов,а следовательно,и числа секций обмотки датчика увеличивается точность формированиясинусоидального выходного сигналадатчика. Принцип действия датчикаоснован на смене зон насыщения магнитопровода статора под полюсамиротора и изменении индуктивногосопротивления соответствукицих секций обмотки датчика. Благодаря этому с помощью резисторов К; , подключенных к средним точкам ( 1,Ь ,)групп, образованных соответствующими парами секций обмотки, формируется т-фаэное .напряжение (при питании датчика отисточника одноазного напряжения), модулированное поамплитуде по гармоническому законув функции контролируемого угловогоположения. 2 ил.226038где К х=1,2,В1 1 О 20 Число отверстий Е на статоре выполнено равным 2 р ш,п. Чем это число больше, тем более близкая к синусоиде форма выходного сигнала датчика может быть получена.Взаимная фазировка подключениягрупп к шинам 92 и 93.питания опре 11 11 40 деля е тся знаком функции со з ес ввыражении ( 1 ) для К;Если знак этой функции положительный , то секции данной фазы обмотки , расположенные в одном отверс тии , присоединены к одной и той жешине питания , а если отрицательный - то к различным шинам ( например , с екции 3 1 и 3 5, расположенные в отвер сТИИ 5 фиг 2) еДатчик работает следующим образом.о При повороте ротора 26 датчикана некоторый уголпроисходит смена зон насыщения магнитопровода статора 1 под полюсами р ротора, благодаря чему перераспределяется напряжение питания, приложенное к шинам 92 и 93, между парами секций, раэ 1Изобретение относится к контроль-. но-измерительной технике и может быть использовано для измерения угла поворота вала и преобразования углового положения в синусоидальный выходной сигнал.На: фиг,1 изображена конструкция двухфазного (ш=2) четьрехполюсного (2 Р = 4) датчика углового положения с числом отверстий на статоре Е = = 24 (и = 3); на фиг.2 - электрическая схема датчика (в скобках указаны номера отверстий, в которых размещены секции обмотки датчика).Датчик углового положения содержит кольцевой статор 1 с Е отверстиями 2 - 25 (Е=24), четырехполюсный ротор 26, выполненный в виде двух стержневых постоянных магнитов, размещенных на валу 27. В отверстиях 2 - 25 размещаются секции 28 - 75 обмотки датчика (по две секции в каждом отверстии), соединенные в соответствии с электрической схемой (фиг.2). Секции, размещенные в диаметрально расположенных отверстиях статора, объединены попарно, а пары, расположенные в пространстве на взаимно пер пендикулярных диаметрах, объединены в группы. Например, секции 28 и 40, размещенные в диаметрально расположенных отверстиях 2 и 14, объединены в одну пару, а секции 34 и 46, размещенные в диаметрально расположенных отверстиях 8 и 20, - в другую пару. Поскольку диаметр, на котором расположены отверстия 2 и 14, расположен в пространстве перпендикулярно диаЛетру, содержащему отверстия 8 и 20, то указанные пары секций 28, 40 и 34 46 объединены в группу, .образуя среднюю точку А. Количество групп для каждой фазы равно Е/2 р=6.Средние точки групп (точки соединения пар секций, например точки А, В,) подключены через резисторы 76 - 87 к соответствующим выходным клеммам 88 и 89 датчика, к которым присоединены измерители 90 и 91 тока. Концевые выводы всех групп секционированной обмотки датчика подключены к шинам 92 и 93 однофазного источника питания, имеющег заземленную среднюю точку 94.Соп 1 ротивления К. резисторов датчика выбираются по номиналу согласно выражениюК. =К,) ссеес р).+рс 2(с) - -(3-1).1(1) 1.сопротивление резистора, подключенного к точ-, ке соединения пар секций первой группы (:1) в первой фазе (3 т 1) обмотки при о(, =0;(шп) - номер группы вкаждойфазе;Ы, - угловая координата отверстия в статоре, принятого за начало отсчета угловых координат;21 - угловое смещение между Е отверстиями .статора;- пространственный уголсмещения фаз обмотки статора, равный 2%/ш для нечетного ш и )1/ш для четного ш.Для двухфазного варианта выполнения датчика (ш=2, Р =2) сопротивление резисторов 76-81 для первой фазы (3-1) рассчитываются по формуле, полученной иэ выражения (1):К=К,созес20/, + 6(1-1)Я , (2) а сопротивления. резисторов 82 - 87 которые подключены к выходной клемме второй фазы (1=2), - по формулеК=К, ) еес 2 с 2 + - (з.-1)п . (3)1226038=1,2,(шп) 2 Т Х 35 мещенных в пазах, расположенныхвзаимно перпендикулярно. В результате этого при повороте ротора, на 31пример , на угол ), =потенциалы2 р5средних точек групп (точки А, В,)относительно средней точки 94 источника питанияизменяются от значеБния Б = - до нуля со сдвигом фаз,102 Правным р =. Следовательно в2У,средних точках (А,В,) групп образуется многофазная симметричнаясистема напряжений, амплитуда и фаза 15которых зависят от углаповоротаротора. Огибающая этих напряжений1имеет форму трапеции с периодом,равным Т . Выходным сигналом датчика является величина тока, протекающего через измерители 90 и 91 тока. В двухфазном варианте исполнения датчика ток в первой фазеизменяется по закону 1 здп 2 Рздпий,а во второй фазе - по закону 1 соз 2 Р кздп )с.Наиболее целесообразно в качествеизмерителя тока использовать операционный усилитель.Преимуществом предлагаемого датчйка является возможность более точногоизмерения углового положения валаблагодаря формированию выходногосигнала синусоидальной формы с меньшими нелинейными искажениями. Формула изобретения Датчик углового положения, содержащий 2 Р-полюсный ротор, выполненный из постоянного магнита, кольцевой статор с Х отверстиями, размещенную в них в-фазнуюсекционированную обмотку, секции которой объединены вгрупп, группы состоя г из Р пар секций, а их концевые выводы объединены и предназначены для подключения к шинам однофазного источника питания, о т л и ч а ю щ и й с я тем, что, с целью повышения точности за счет улучшения формы кривой выходного сигнала, он снабжень резисторами, под;люченными между точками соединения пар секций в каждой группе и выходными клеммами датчика и выбранными по номиналу согласно выражениюК =Й, созесРЫ,+Рд(-)-Р(-1) С 1) где к, - сопротивление резистора, подключенного к точке соединения пар секцийпервой группы ( =1) впервой фазе 6 =1) обмотки при с =0; номер группы в каждойфазе;угловая координата отверстия в статоре, принятого за начало отсчета угловых координат; угловое смещение междуотверстиями статора;- пространственный уголсмещения фаз обмотки.статора, равный 2 Й/пдля нечетного гп и К /пдля четного ь,число отверстий Е на статоре выполнено равным 2 Р е , где ь2,3, а фазировка подключения групп к шинам питания определяется знаком функции "собес" в выражении К;/28 Тираж 670 ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д, писно каз 2110 5 Производственно-полиграФическое предприятие, г. Ужгород, ул. Проектная
СмотретьЗаявка
3786436, 03.09.1984
ПРЕДПРИЯТИЕ ПЯ В-8670
КАРЖАВОВ БОРИС НИКОЛАЕВИЧ
МПК / Метки
МПК: G01B 7/30
Метки: датчик, положения, углового
Опубликовано: 23.04.1986
Код ссылки
<a href="https://patents.su/4-1226038-datchik-uglovogo-polozheniya.html" target="_blank" rel="follow" title="База патентов СССР">Датчик углового положения</a>
Система для контроля положения секций морской многоканальной сейсмокосы

Номер патента: 972438
Опубликовано: 07.11.1982
Авторы: Глумов, Желудков, Лапшинов, Симановский, Франк
МПК: G01V 1/38
Метки: многоканальной, морской, положения, сейсмокосы, секций
...и 13.2 амплитуды принятых колебаний, детекторы 14,1 и 14.2 принятых колебаний устройства 15.1 и 15.2 выделения первых вступлений прямой волны, триггеры 16.1 - 16.3 с установочными входами 17.1 - 17.3 и предустановочными входами 18.- 18.3, двувходовые вентили 19.1 - 19.3, первые входы 20.1 - 20.3 которых подключены к выходам триггеров 16.1 - 16.3, а вторые входы 21.1 - 21.3 - к выходу генератора 9, и счетчики 22. - 22.3 импульсов. Каждое устройство 15.1 и 15.2 выделения первых вступлений прямой волны содержит выходные вентили 23,1 и 23,2, линии задержки 24,1 и 24.2 импульсов и вторые триггеры 25.1 и 25.2 с установочными 26,1 и 26 2 и предустановочными 27 1 и 27 2 входами. Установочные входы 26.1 и 26.2 триггера подключены к выходу...
Система контроля переднего положения секций механизированной крепи

Номер патента: 1514956
Опубликовано: 15.10.1989
Авторы: Аккерман, Вайнштейн, Ихно, Ковалев, Колосюк, Ладошкин, Муфель, Соболев, Ярыгин
МПК: E21D 23/16
Метки: крепи, механизированной, переднего, положения, секций
...например, реле 14 давления с электрическим вы -ходом и дроссель 15. В начальный период после передвижки конвейера нина один воспринимающий элемент 5датчиков 1 не воздействуют цилиндры 8 домкратов 6. Все приводы 3 и 4датчиков 1 через блоки 9 управлениясоединены с линией 12 слива и открывающего и закрывающего эффекта наклапаны гидрораспределителей 2 непроисходит, В случае подсоединенияприводов 3 к линии 11 напора онипринудительно открывают клапан гидрораспределителей 2, Таким образом,в исходном положении перед началомпередвижки секций крепи жидкость излинии 11 напора через все клапаныгидрораспределителей 2 (число ихравно количеству секций в лаве),соединенные последовательно, поступает в индикатор. 13 давления, реле14 которого...
Устройство для удержания в сдвинутом положении секций телескопической вышки

Номер патента: 219496
Опубликовано: 01.01.1968
Авторы: Научно, Рубинштейн, Хмызников
МПК: E21B 15/00, E21B 7/02
Метки: вышки, положении, сдвинутом, секций, телескопической, удержания
...закрепленногоной секции вышки.2, Устройство по п. 1,что криволинейная поверобразована дугой окружиоси поворота вышки. 10 показано устройышки в транспортНа чертеже схематичнство в момент переводаное положение.Устройство содержит крленный на раме 2, тележ отличающееся тем, хи ость кронштейна ости с центром на нштейн 1, установ уЗ и ролик 4, за Известны устроиства для удержания в сдвинутом положении секций телескопической ьышки, выполненные в виде болтов и планок. Основным недостатком таких устройств является то, что выдвижные секции вышки стопорятся вручнуюПредложенное устройство отличается от известных тем, что оно выполнено в виде установленного на несущей раме кронштейна с криволинейной поверхностью и взаимодействующего с ней при...
Устройство дистанционного контроля положения секций механизированной крепи

Номер патента: 546727
Опубликовано: 15.02.1977
Авторы: Богданов, Богданова, Дворкин, Комаров, Лещенко, Орлов, Шалков
МПК: E21D 23/00
Метки: дистанционного, крепи, механизированной, положения, секций
...1, на котором натянута гибкая нить 2 вдоль базы механизированной крепи 3. Один конец нити жестко закреплен, а другой связан через перематывающее устройство 4 ц преобразователь 5 с индикатором 6. На гибкой нити установлены роликоопоры 7, взаимодействующие с упорами 8 секций механизированной крепи, Упоры контактируют с фиксаторами 9.Управление и контроль со штрека осуществляется с помощью пульта 10, преобразователя и звуковой сигнализации 11. Секции крепи перемещаются по направляющим 12 базы при помощи гцдродомкратов 13.Работает устройство следующим образом.Подтягивают секции крепи и базе агрегата.5 При завершении подтягивания упор 8 передвигаемой секции воздействует на участок гибкой нити, которая ограничена ролцкоопорами, прц этом...
Устройство для определения положения секции гидрофицированной крепи
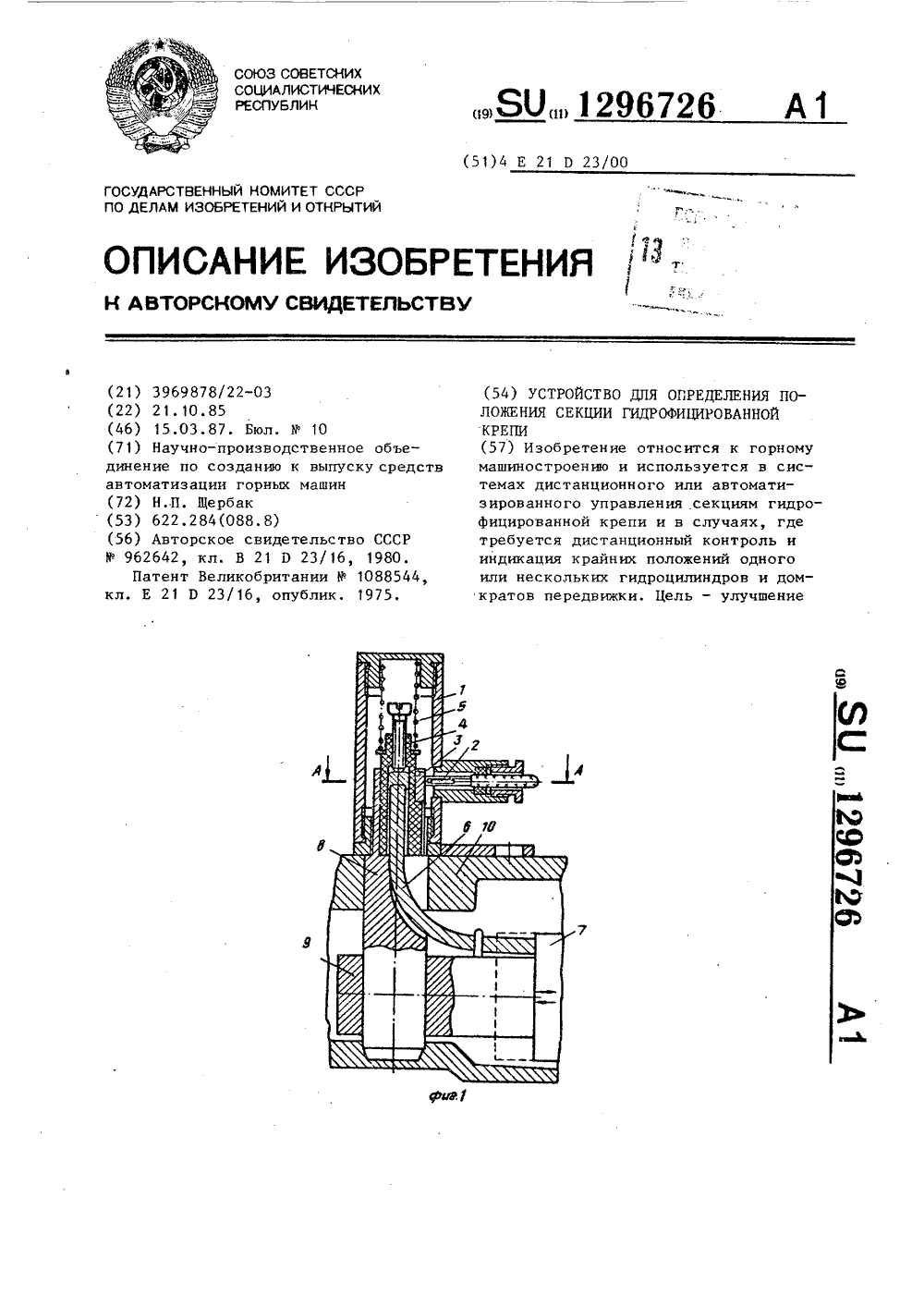
Номер патента: 1296726
Опубликовано: 15.03.1987
Автор: Щербак
МПК: E21D 23/00
Метки: гидрофицированной, крепи, положения, секции
...4 и магнита 3 выходитиз зоны действия магнитного потокаи подает сигнал на пульт управленияо конечном положении секции. 2 ил. 2домкрата передвижки, второй конецразмещен в недвижной направляющей 4.Средняя часть передаточного узла 6расположена в пазу пальца 8, жесткоприкрепленного к неподвижному узлу9 гидрюдомкрата, перпендикулярноего оси. Палец 8 установлен также восновании 10 секции крепи. К основанию 10 секции крепи прикреплен кор 10 пус 1 устройства с подвижной направляющей 4 и,.магнитоуправляемым герконом 2,Передаточный узел может быть выполнен в виде отрезка стального ка 15 ната, обладающего малой поперечнойи высокой продольной жидкостью.Подвижный узел 7 гидродомкратапередвижки может быть либо гидроцилиндром, как показано...
Предыдущий патент: Датчик угловых перемещений
Следующий патент: Датчик угла
Случайный патент: 206225